Изобретение относится к области авиационной техники, а именно к комплексам навигации, управления и наведения летательных аппаратов (ЛА). В наиболее близком аналоге, приведенном в книге [1] (Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г. на стр. 6-16, 391-507), представлен информационно-управляющий комплекс (ИУК) ЛА, включающий в себя навигационные, пилотажные, прицельные, обзорные, измерительные датчики и системы, работающие на различных физических принципах: инерциальные навигационные системы (ИНС) и датчики; радиотехнические средства навигации, включающие радиосистемы ближней (РСБН) и дальней (РСДН) навигации, доплеровские измерители скорости и сноса (ДИСС), спутниковые навигационные системы (СНС); системы опознавания образов естественных и искусственных полей (рельефа земной поверхности, магнитного поля Земли, гравитационного поля Земли, поля радиолокационного контраста и др.); воздушные (аэрометрические) датчики и системы, включающие в себя систему воздушных сигналов (СВС) и датчики углов атаки и скольжения (ДУАС); обзорно-прицельные средства локации пространства, визирования ориентиров и слежения за подвижными и неподвижными объектами (астровизирные средства, тепло-, оптико-, радио- визирные средства), а также вычислительную систему, обеспечивающую информационный обмен между датчиками и системами и расчет необходимых навигационно-пилотажных и специальных параметров состояния ЛА. Вычислительная система при этом содержит следующие блоки: блок ввода-вывода и управления информационным обменом, обеспечивающий информационный обмен между компонентами комплекса; блок формирования параметров состояния ЛА, обеспечивающий расчет основных информационных параметров состояния и движения ЛА (азимуты и дальности до ориентиров, отклонения от заданной траектории, координаты, скорости, ускорения, углы ориентации ЛА - см. [1], стр. 7); блок комплексной обработки информации, поступающей от разных измерителей. Комплекс обеспечивает обработку информации различных датчиков и систем, определение параметров движения ЛА в целом и его отдельных точек, информационное взаимодействие с экипажем, управление состоянием ЛА. Из-за наличия инструментальных и методических погрешностей датчиков и систем, из-за воздействия естественных и искусственных помех, из-за неточности априорных знаний о геофизических полях, о движении и состоянии атмосферы, о геометрии пространства, о координатах и движении радиомаяков, ориентиров, светил, спутников и проч., - параметры движения и состояния ЛА определяются с ошибками. В вычислителе комплекса реализуется (см. [1], стр. 391; [2], стр. 26-28, 80-271) метод комплексирования информации, предусматривающий проведение статистической фильтрации информации двух или нескольких систем и получении корректирующих поправок для одной из них (корректируемой). На основе скорректированной информации осуществляется расчет основных параметров состояния и движения ЛА (азимуты и дальности до ориентиров, отклонения от заданной траектории, координаты, скорости, ускорения, углы ориентации ЛА - см., например, литературу [1], стр. 171-301).
Основными недостатками наиболее близкого аналога являются:
1) при отказах или кратковременных отключениях отдельных систем комплекс становится неработоспособным (например, при переходе ЛА в режим сверхманевренности теряют работоспособность аэрометрические датчики, при маневрировании ЛА снижается качество работы радиотехнических и обзорно-прицельных средств);
2) при расхождениях реальных ошибок и используемых в алгоритмах моделей погрешностей комплекс становится малоэффективным или даже фактически неработоспособным при исправных датчиках и системах (особенно при постановке специальных помех).
Задачей изобретения является расширение функциональных возможностей ИУК и, как следствие этого, повышение эффективности работы информационно-управляющего комплекса многофункциональных ЛА (МЛА), снабженных ИУК.
Достигается указанный результат тем, что информационно-управляющий комплекс, содержащий взаимосоединенные входами-выходами по магистрали информационного обмена систем радиотехнические средства навигации, обзорно-прицельные средства, системы опознавания образов, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства, вычислительную систему комплекса, включающую взаимосоединенные по магистрали вычислительного информационного обмена блок формирования параметров состояния, блок комплексной обработки информации, блок ввода-вывода и управления информационным обменом, другой вход-выход которого является входом-выходом вычислительной системы комплекса, дополнительно снабжен введенными в состав вычислительной системы комплекса блоком объединенной базы данных, блоком защиты от действия естественных и искусственных помех, блоком адаптации комплекса, блоком синтеза параметров окружающего пространства, блоком синтеза параметров состояния, блоком логической комплексной обработки информации, взаимосоединенных между собой и с блоком формирования параметров состояния, с блоком комплексной обработки информации, с блоком ввода-вывода и управления информационным обменом вычислительной системы комплекса по магистрали вычислительного информационного обмена.
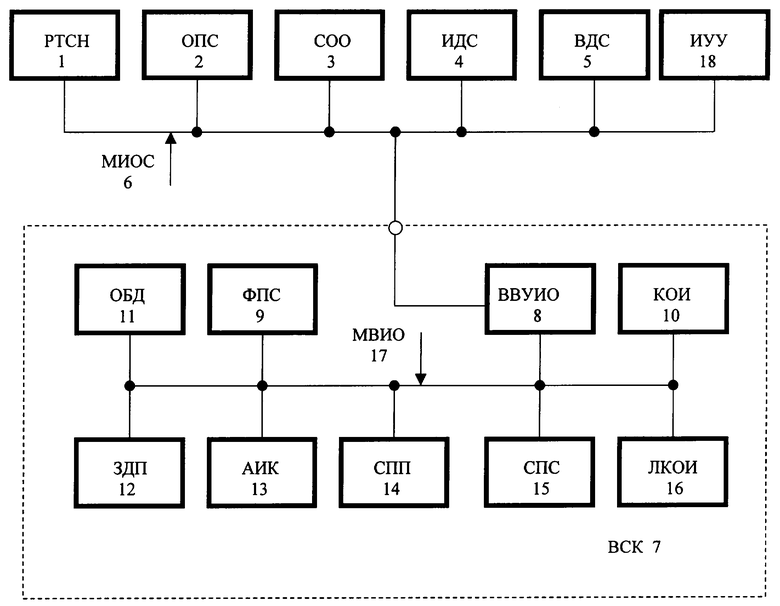
На чертеже представлена блок-схема информационно-управляющего комплекса, содержащего:
1 - радиотехнические средства навигации РТСН;
2 - обзорно-прицельные средства ОПС;
3 - системы опознавания образов СОО;
4 - инерциальные датчики и системы ИДС;
5 - воздушные датчики и системы ВДС;
6 - магистраль информационного обмена систем МИОС;
18 - индикационно-управляющие устройства ИУУ;
7 - вычислительную систему комплекса ВСК.
При этом в состав ВСК 7 входят следующие блоки:
8 - блок ввода-вывода информации и управления информационным обменом ВВУИО;
9 - блок формирования параметров состояния ФПС;
10 - блок комплексной обработки информации КОИ;
11 - блок объединенной базы данных ОБД;
12 - блок защиты от действия естественных и искусственных помех ЗДП;
13 - блок адаптации информационного комплекса АИК;
14 - блок синтеза параметров окружающего пространства СПП;
15 - блок синтеза параметров состояния СПС;
16 - блок логической комплексной обработки информации ЛКОИ;
17 - магистраль вычислительного информационного обмена МВИО.
Информационная взаимосвязь систем ИУК осуществляется по МИОС 6 (на чертеже обозначена тонкой сплошной линией).
Информационный обмен между входами-выходами вычислительно-логических блоков ВСК 7 осуществляется по МВИО 17 (на чертеже обозначена тонкой сплошной линией).
Блоки 1-5, 18 подключены своими входами/выходами к магистрали информационного обмена систем, к которой подключен также вход/выход ВСК 7, при этом входом/выходом ВСК 7 являются вход/выход блока ВВУИО 8, а другой вход/выход блока ВВУИО 8 подключен к внутренней магистрали вычислительного информационного обмена МВИО 17, к которой подключены также входы/выходы блоков 9-16.
Блоки 1-5 представляют собой известные датчики и системы бортового оборудования ЛА, описанные в литературе, например [1], стр. 8-16, 171-243, 316-317, 325-327, 374-385; [2], стр. 6-22; [3], стр. 229-242. В состав блока РТ СН 1 входят: РСБН, измеряющая азимут радиомаяка и дальность до него, с помощью которых при известных координатах радиомаяка решается задача определения координат объекта; РСДН, измеряющая дальности до нескольких наземных радиостанций, с помощью которых при известных координатах станций решается задача определения координат объекта; ДИСС, измеряющая доплеровские сдвиги частот излучаемых радиосигналов, с помощью которых решается задача определения вектора скорости объекта; СНС, измеряющая временную задержку, фазовый сдвиг и доплеровский сдвиг частоты радиосигналов от космических спутников, с помощью которых при известных параметрах движения спутников решается задача определения времени, координат и скорости объекта; другие радиотехнические средства навигации, например радиовысотомер, радиокомпас и т.п. В состав блока ОПС 2 входят различные тепловые, оптические, радиолокационные средства визирования ориентиров (целей), измеряющие дальности до ориентиров и/или углы их визирования, с помощью которых при известных координатах ориентиров решается задача определения координат объекта, а при известных координатах объекта - задача определения координат целей. В состав блока СОО 3 входят измерители параметров различных геофизических поверхностных и пространственных полей: поля рельефа, магнитного поля, гравитационного поля, поля радиолокационного контраста и др., с помощью которых при известных закономерностях распределений этих полей в околоземном пространстве решается задача определения координат объекта, а при известных координатах объекта - задача картографирования указанных полей. В состав блока ИДС 4 входят: ИНС, решающие задачу автономного счисления скорости, координат и угловой ориентации объекта на основе измеряемых с помощью акселерометров и гироскопов, входящих в ИНС, ускорений и угловых скоростей (или углов ориентации) объекта; курсовертикали, решающие задачу счисления скорости и угловой ориентации объекта на основе измерительной информации гироскопов и акселерометров; акселерометры и гироскопы, измеряющие ускорения и угловые скорости (углы ориентации) в местах их расположения. В состав блока ВДС 5 входят СВС, измеряющие статические, динамические, полные давления воздуха, с помощью которых решаются задачи определения высоты и скорости объекта относительно атмосферы; ДУАС, измеряющие направления обтекающих воздушных потоков; воздушные датчики (приемники воздушных давлений, датчики углов атаки и скольжения).
Блок ИУУ 18 представляет собой совокупность бортовых индикационно-управляющих устройств объекта, описанных в литературе, например [3], стр. 229-242, в число которых входят, например, система управления оружием (СУО), средства индикации и отображения информации, система связи, система автоматического управления (САУ), система дистанционного управления (СДУ), пульт управления.
Блоки МИОС 6 и МВИО 17 представляют собой известные (описанные, например, в книге [4], стр. 21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
Блок ВВУИО 8 представляет собой известное устройство (описанное, например, в книге [4], стр. 16-24, 386-406, 436-440) сопряжения вычислителя с линиями связи, осуществляющее прием, контроль и выдачу информации.
Блоки ФПС 9, КОИ 10, ЗДП 12, АИК 13, СПП 14, СПС 15, ЛКОИ 16 выполнены, например, в виде однопроцессорных вычислителей ([4], стр. 31).
Блок ОБД 11 выполнен, например, на постоянном запоминающем устройстве ПЗУ ([4], стр. 30).
Блок ФПС 9 обеспечивает расчет параметров состояния МЛА, включающего в себя координаты, параметры движения и ориентации МЛА в целом и отдельных его точек относительно базовой системы отсчета, атмосферы, земной поверхности, ориентиров и т.п., на основе решения соответствующих уравнений, связывающих эти параметры с измеряемыми величинами, поступающими в магистраль МВИО 17 (см., например, книгу [1], стр. 7-8, 117-158, 171-283).
Блок КОИ 10 обеспечивает комплексную обработку информации систем путем формирования оценок погрешностей определения параметров состояния МЛА (см., например, книгу [1], стр. 40-81, 391-507).
Дополнительно введенный блок ОБД 11 обеспечивает накопление, хранение и выдачу в МВИО информации о различных естественных и искусственных полях Земли, об объектах, взаимодействующих с МЛА (ориентирах, целях, своих ЛА, небесных светилах, радиомаяках и т.п.), о внутренних параметрах ИУК, причем эта информация поступает в блок ОБД 11 посредством МВИО 17 от других блоков ВСК 7, в которых производится формирование такой информации (СПП 14, АИК 13, ЗДП 12, ЛКОИ 16).
Дополнительно введенный блок ЛКОИ 16 обеспечивает уточнение параметров геофизических полей, состояния атмосферы, подстилающей поверхности, движения ориентиров и других взаимодействующих с ЛА объектов и т.п.
Дополнительно введенный блок ЗДП 12 осуществляет повышение качества измерительной информации датчиков и систем путем выявления, идентификации естественных и искусственных помех и выдачи соответствующей информации в МВИО 17 для учета и накопления знаний в ОБД 11.
Дополнительно введенный блок АИК 13 на основе специальной комплексной обработки избыточной информации, поступающей от измерительных датчиков и систем ИУК и из других блоков ВСК 7 по магистрали МВИО 17, обеспечивает формирование оценок внутренних параметров ИУК (относительно стабильных внутренних погрешностей) и выдачу их в МВИО 17 для учета и накопления знаний в ОБД 11.
Дополнительно введенный блок СПП 14 обеспечивает расчет в зависимости от известных величин неизвестных и/или недоступных для измерений в текущий момент времени параметров априорной информации о геофизических полях, состоянии атмосферы, подстилающей поверхности, движении ориентиров и других взаимодействующих с ЛА объектов и т.п., используемой в алгоритмах.
Дополнительно введенный блок СПС 15 обеспечивает синтез параметров состояния МЛА как функций от известных и доступных измерениям величин в условиях, когда непосредственное определение этих параметров затруднено или невозможно (например, синтез углов атаки и скольжения при отказах или отключениях систем блока ВДС 5, синтез азимута цели и дальности до нее при кратковременной потере цели системами блока ОПС 2 из-за маневрирования ЛА и т.п).
ИУК работает следующим образом.
Измеряемая информация о параметрах движения МЛА Ji (i=ИДС, ВДС, РТСН, ОПС, СОО) из блоков 1-5 поступает через магистраль МИОС 6, блок ВВУИО 8 в магистраль МВИО 17. В блоке ОБД 11 хранится априорная информация Кi (i=ИДС, ВДС, РТСН, ОПС, СОО) о параметрах геофизических полей и об объектах (ориентирах, небесных светилах, радиомаяках и т.п.), взаимодействующих с МЛА, а также о внутренних параметрах ИУК - оценках погрешностей δJi (i=ИДС, ВДС, РТСН, ОПС, СОО). Эта информация из блока ОБД 11 поступает в магистраль МВИО 17. Из магистрали МВИО 17 эта информация поступает на вход блоков ФПС 9 и КОИ 10.
В блоке ФПС 9 производится обработка информации различных датчиков и систем в соответствии с общим уравнением (см., например [1], стр. 171-178, 189-195, 216-224, 225-229, 236-240, 316-327, 374-385):

где Ni - многомерный вектор определяемых параметров, включающий координаты, скорость, ускорение, углы ориентации ЛА;
Ji - измерительная информация, поступающая от датчиков и систем, скорректированная на величину полученных поправок;
Кi - априорная информация, используемая в алгоритмах и включающая в себя информацию о координатах и скоростях спутников, радиомаяков, небесных светил, наземных ориентиров, геометрические характеристики навигационного пространства, параметры геофизических полей (атмосферы, гравитационного, магнитного, рельефа, радионавигационных и т.п.);
;i - алгоритм (оператор) обработки информации датчиков и систем;
i - индекс, принимающий значения: ИДС (инерциальные датчики и системы), ВДС (воздушные датчики и системы), РТСН (радиотехнические средства навигации), ОПС (обзорно-прицельные средства), СОО (системы опознавания образов).
В блоке ФПС 9 определяются многомерные векторы Ni (i=ИДС, ВДС, РТСН, ОПС, СОО) и основные параметры состояния и движения МЛА (азимуты и дальности до ориентиров, отклонения от заданной траектории, координаты, скорости, ускорения, углы ориентации МЛА), необходимые для решения конкретных частных задач комплекса.
В блоке КОИ 10 вычитанием из вектора корректируемой информации вектора корректирующей информации строится невязка Z между ними и осуществляется обработка невязки Z по алгоритму нестационарной вычислительно-устойчивой фильтрации (см. [1], стр. 40-45; [2], стр. 96-108) и для каждого k-го момента времени формируется оценка вектора ошибок Х в виде:

где  - прогнозируемое значение вектора Х в k-й момент времени;
- прогнозируемое значение вектора Х в k-й момент времени;
 - оценка значения вектора Х в k-й момент времени.
- оценка значения вектора Х в k-й момент времени.
В блоке КОИ 10 определяются корректирующие поправки к многомерным векторам Ni (i=ИДС, ВДС, РТСН, ОПС, СОО).
Полученные данные о многомерных векторах Ni (i=ИДС, ВДС, РТСН, ОПС, СОО) поступают через магистраль МВИО 17 также на входы блоков ЗДП 12, АИК 13, ЛКОИ 16.
Необходимая информация о различных параметрах состояния объекта поступает из ВСК 7 в магистраль МВИО 14, а оттуда - в блок ИУУ 18 для индикации на пульте индикации и формирования соответствующих управляющих сигналов в САУ, СДУ, СУО.
В блоке АИК 13 производится оценивание параметров внутренних погрешностей блоков ИУК - величин δJi (i=ИДС, ВДС, РТСН, ОПС, СОО), например, с помощью решения уравнений вида (2), в которых в качестве оцениваемого вектора состояния Х выступает многомерный вектор, элементами которого являются элементы векторов δJi (i=ИДС, ВДС, РТСН, ОПС, СОО). Полученные оценки внутренних погрешностей блоков ИУК поступают через магистраль МВИО 17 в блок ОБД 11 для уточнения хранящихся там данных и в блоки ФПС 9 и КОИ 10 для использования их в текущих расчетах.
На вход блока ЗДП 12 из магистрали МВИО 17 поступают данные о многомерных векторах Ni (i=ИДС, ВДС, РТСН, ОПС, СОО); измерительная информация о параметрах движения МЛА Ji (i=ИДС, ВДС, РТСН, ОПС, СОО); информация о параметрах навигационного пространства Кi (i=ИДС, ВДС, РТСН, ОПС, СОО). В блоке ЗДП 12 производится оценивание параметров естественных и искусственных помех - величин ΔJi (i=РТСН, ОПС, СОО), например, с помощью решения уравнений вида (2), в которых в качестве оцениваемого вектора состояния Х выступает многомерный вектор, элементами которого являются элементы векторов ΔJi (i=РТСН, ОПС, СОО), а вектор измерений невязок Z строится как разность между фактическими измерениями Ji (i=РТСН, ОПС, СОО) и их расчетными значениями J

где ℵi(N, К) (i=РТСН, ОПС, СОО) - алгоритмы (операторы) преобразования информации, которые получаются из уравнений (1), разрешенных известными методами преобразования уравнений (описанными, например, в книге [5], стр. 142-162, 45-47: разложение неалгебраических функций в степенные ряды, линеаризацию нелинейных уравнений, решение систем линейных уравнений) относительно величин Ji (i=РТСН, ОПС, СОО) соответственно;
вектор N выбирается из числа доступных величин Ni (i=ИДС, ВДС, РТСН, ОПС, СОО);
вектор К выбирается из числа доступных величин Кi (i=ИДС, ВДС, РТСН, ОПС, СОО).
При этом корректирующей информацией являются расчетные векторы J
На вход блока ЛКОИ 16 из магистрали МВИО 17 поступают: данные о многомерных векторах Ni (i=ИДС, ВДС, РТСН, ОПС, СОО); измерительная информация о параметрах движения МЛА Ji (i=ИДС, ВДС, РТСН, ОПС, СОО); информация о параметрах навигационного пространства Кi (i=ИДС, ВДС, РТСН, ОПС, СОО), хранящаяся в блоке ОБД 11. В блоке ЛКОИ 16 производится оценка величин δКi (i=ИДС, ВДС, РТСН, ОПС, СОО), например, с помощью решения уравнений вида (2), в которых в качестве оцениваемого вектора состояния Х выступает многомерный вектор, элементами которого являются элементы векторов δКi (i=ИДС, ВДС, РТСН, ОПС, СОО), а вектор измерений невязок Z строится как разность между априорными данными о величинах Кi (i=ИДС, ВДС, РТСН, ОПС, СОО), получаемых из блока ОБД 11, и их косвенными измерениями К

где ;i (N, J) (i=ИДС, ВДС, PTCH, ОПС, COO) - алгоритмы (операторы) преобразования информации, которые получаются из уравнений (1), разрешенных известными методами (описанными, например, в книге [5], стр. 142-162, 45-47) относительно величин Кi (i=ИДС, ВДС, PTCH, ОПС, СОО) соответственно;
вектор N выбирается из числа доступных величин Ni (i=ИДС, ВДС, PTCH, ОПС, СОО);
вектор J выбирается из числа доступных величин Ji (i=ИДС, ВДС, PTCH, ОПС, СОО).
Полученные оценки погрешностей δКi (i=ИДС, ВДС, PTCH, ОПС, СОО) через магистраль МВИО 17 поступают в блок ОБД 11 для уточнения хранящихся там данных и в блоки ФПС 9 и КОИ 10 для соответствующей коррекции априорной информации Кi (i=ИДС, ВДС, PTCH, ОПС, СОО).
Таким образом, введение в состав ВСК 7 описанных блоков ЗДП 12, АИК 13, ЛКОИ 16 позволяет в процессе работы ИУК приводить модели погрешностей, используемые в алгоритмах, в соответствие с реальными ошибками комплекса в различных условиях эксплуатации: при действии естественных и искусственных помех, при наличии нестабильностей внутренних погрешностей систем комплекса, при наличии неопределенностей в описании геофизических полей, ориентиров, радиомаяков, - вследствие чего устраняется существенный недостаток наиболее близкого аналога и расширяются функциональные возможности ИУК. Достижению этой цели способствует также введение в состав ВСК 7 описанного блока ОБД 11, который позволяет обеспечить накопление информации о погрешностях комплекса, параметрах полей, ориентиров, различных помех, хранение этой информации и ее оперативное использование при решении задачи приведения моделей, используемых в алгоритмах, в соответствие с реальными ошибками.
В блоке СПП 14 производится синтез неизвестных и/или недоступных для измерений в текущий момент времени параметров окружающего пространства, входящих в состав векторов Кi (i=ИДС, ВДС, РТСН, ОПС, СОО) и Ji (i=РТСН, ОПС, COO), например: скорости ветра - для обеспечения безопасности пилотирования в режиме сверхманевренности МЛА; дальностей и углов визирования цели - для обеспечения прицеливания и т.п., - из наличной информации. Для этого на вход блока СПП 14 поступают из магистрали МВИО 17 достоверные скорректированные данные о многомерных векторах Ni, Ji, Кi (i=ИДС, ВДС, РТСН, ОПС, СОО), сформированных в блоках 9-11, и путем решения подходящих уравнений вида (3)-(4) производится расчет неизвестных параметров. При этом значения индекса “i” в правой и левой частях уравнений могут различаться.
В блоке СПС 15 производится синтез информации об элементах многомерных векторов параметров состояния МЛА Ni (i=ИДС, ВДС, РТСН, ОПС, СОО) в тех случаях, когда прямое определение этих величин в блоках 9-10 невозможно, например, из-за отказа измерительного датчика (какого-либо блока 1-5) ИУК, или из-за пропадания сигнала датчика (например, датчика блока РТСН 1 - при маневре, или датчика блока ОПС 2 - при потере контакта с ориентиром, или датчика блока ВДС 5 - при переходе МЛА в режим сверхманевренности и т.д.). Для этого на вход блока СПС 15 поступают из магистрали МВИО 17 достоверные скорректированные данные о многомерных векторах Ni, Ji, Кi (i=ИДС, ВДС, РТСН, ОПС, СОО), сформированных в блоках 9-11, и решением уравнений

подобных уравнениям (1), производится расчет неизвестных параметров движения МЛА. При этом векторы J и К в правых частях выражений (5) выбираются из числа Ji и Кi (i=ИДС, ВДС, РТСН, ОПС, СОО). Синтезируемые оценки N
Введение в состав ВСК 7 описанных блоков СПП 14 и СПС 15 позволяет за счет осуществляемого в них синтеза параметров состояния МЛА и окружающего пространства обеспечить работоспособность комплекса при отказах или кратковременных отключениях отдельных систем, вследствие чего устраняется недостаток наиболее близкого аналога и расширяются функциональные возможности ИУК.
Таким образом, на примерах технической реализации показано достижение технического результата в части расширения функциональных возможностей ИУК и, как следствие, повышение эффективности применения оснащаемых им многофункциональных летательных аппаратов.
ЛИТЕРАТУРА
1. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г.
2. Ривкин С.С., Ивановский Р.И., Костров А.В. Статистическая оптимизация навигационных систем. - Л.: Судостроение, 1976 г.
3. Фомин А.В. Су-27. История истребителя. - М.: РА “Интервестник”, 2000 г.
4. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г.
5. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. - М.: Наука, 1977 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ГРУППЫ МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232102C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2232377C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2004 |
|
RU2263881C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263280C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
Изобретение относится к средствам решения задач навигации, управления и наведения многофункциональных летательных аппаратов. По магистрали информационного обмена систем соединены входами-выходами радиотехнические средства навигации, обзорно-прицельные средства, системы опознавания образов, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства и вычислительная система. Последняя включает в себя взаимосоединенные по магистрали вычислительного информационного обмена блок формирования параметров состояния, блок комплексной обработки информации, блок ввода-вывода и управления информационным обменом, блок объединенной базы данных, блок защиты от действия естественных и искусственных помех, блок информационной адаптации комплекса, блок синтеза параметров окружающего пространства, блок синтеза параметров состояния и блок логической комплексной обработки информации. Изобретение расширяет функциональные возможности комплекса и повышает эффективность его работы. 1 ил.
Информационно-управляющий комплекс многофункциональных летательных аппаратов, содержащий взаимосоединенные входами-выходами по магистрали информационного обмена систем радиотехнические средства навигации, обзорно-прицельные средства, системы опознавания образов, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства, вычислительную систему комплекса, включающую взаимосоединенные по магистрали вычислительного информационного обмена блок формирования параметров состояния, блок комплексной обработки информации, блок ввода-вывода и управления информационным обменом, другой вход-выход которого является входом-выходом вычислительной системы комплекса, отличающийся тем, что он дополнительно снабжен введенными в состав вычислительной системы комплекса блоком объединенной базы данных, блоком защиты от действия естественных и искусственных помех, блоком информационной адаптации комплекса, блоком синтеза параметров окружающего пространства, блоком синтеза параметров состояния, блоком логической комплексной обработки информации, соединенных между собой и с блоком формирования параметров состояния, с блоком комплексной обработки информации, с блоком ввода-вывода и управления информационным обменом вычислительной системы комплекса по магистрали вычислительного информационного обмена.
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОЦЕЛЕВОГО ДВУХМЕСТНОГО САМОЛЕТА | 2000 |
|
RU2166794C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2000 |
|
RU2177897C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |

