Изобретение относится к авиационному приборостроению, в частности к бортовому оборудованию, обеспечивающему навигацию, выполнение прицельных задач, подготовку и пуск оружия.
Из известных аналогов наиболее близким по технической сущности является, выбираемый в качестве прототипа, прицельно-навигационный комплекс, описание и блок-схема которого приведена в книге [1] Гришутина В.Г. "Лекции по авиационным прицельным системам стрельбы". Киев, КВВАИУ, 1980, стр. 354 - 357.
Данный комплекс содержит обзорно-прицельную систему ОПС, систему формирования параметров индикации, управления, применения оружия СФП, индикационно-отрабатывающую систему ИОС, информационную систему параметров движения летательного аппарата ИСПД. ОПС обнаруживает и сопровождает, например воздушную цель - самолет или вертолет, с которого выбрасывается ложная цель. ОПС переходит на сопровождение ложной цели. Например, ложная тепловая цель - горящая шашка, функционирующая 3-10 сек, уводит ОПС от цели на 300 - 2000 м.
По окончании горения шашки система становится фактически неработоспособной из-за потери контакта с ложной и действительной целями.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является обеспечение целеуказания на действительную цель по окончании функционирования ложной цели.
Достигается технический результат тем, что в состав прицельно-навигационного комплекса, содержащего последовательно соединенные обзорно-прицельную систему, систему формирования параметров индикации, управления, применения оружия и индикационно-отрабатывающую систему, а также информационную систему параметров движения летательного аппарата, выход которой подключен ко вторым входам системы формирования параметров индикации, управления, применения оружия и информационно-отрабатывающей системы, дополнительно введено включенное между входом и выходом обзорно-прицельной системы устройство прогнозирования местоположения цели, на второй вход которого подключен второй выход системы формирования параметров индикации, управления, применения оружия, причем устройство прогнозирования местоположения цели выполнено на последовательно соединенных блоке запаздывания, блоке оптимальной фильтрации, блоке экстраполяции, блоке памяти, блоке компараторов, блоке умножения и сумматоре, выход которого подключен к выходу устройства прогнозирования местоположения цели, первый и второй входы которого подключены соответственно ко входу блока запаздывания и ко второму входу блока памяти, а на второй вход блока умножения подключен выход блока экстраполяции.
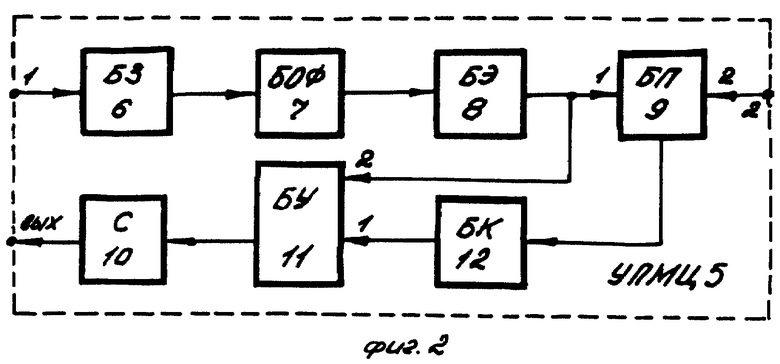
На фиг. 1 представлена блок-схема предлагаемого комплекса, содержащего:
1 - обзорно-прицельная система ОПС,
2 - система формирования параметров индикации, управления, применения оружия СФП,
3 - информационно-отрабатывающая система ИОС,
4 - информационная система параметров движения летательного аппарата ИСПД,
5 - устройство прогнозирования местоположения цели УПМЦ.
На фиг. 2 представлена блок-схема УПМЦ5, содержащего:
6 - блок запаздывания БЗ, 7 - блок оптимальной фильтрации БОФ, 8 - блок экстраполяции БЭ, 9 - блок памяти БП, 10 - сумматор, 11 - блок умножения БУ, 12 - блок компараторов БК.
Комплекс работает следующим образом.
По обнаружению цели ОПС1 сопровождает ее, формирует координаты (полярные) относительного местоположения цели относительно летательного аппарата X = Xi (i = 1, 2, 3), которые с выхода ОПС1 поступают на первый вход УПМЦ5 и на первый вход СФП2.
ИСПД4 является информационной системой (пример технического выполнения ИСПД5 приведен, например, в книге [2] И.И. Помыкаева и др. "Навигационные приборы и системы". Москва, Машиностроение, 1983 г., стр. 380), формирующей координаты местоположения, составляющие путевой и воздушной скорости, составляющие линейного ускорения, составляющие угловой скорости летательного аппарата, эти параметры, обозначаемые yi (i - количество параметров) с выхода ИСПД4 поступают на второй вход СФП2 и на второй вход ИОС3. СФП2 является вычислительной системой ([1], с. 357), формирующей по входным сигналам параметры индикации, управления самолетом и оружием, команды на подготовку и пуск оружия, которые поступают на первый вход ИОС3 с первого выхода СФП2, в котором также формируется команда U = +U0, свидетельствующая о наличии информации от ОПС1, и U = -U0, свидетельствующая о пропадании информации от ОПС1 по окончании функционирования ложной цели. Сигнал "U" со второго выход СФП2 поступает на второй вход УПМЦ5. ИОС3 ([1], с. 356) по входным сигналам формирует информационное обеспечение экипажу, обеспечивает управление летательным аппаратом, а также подготовку и пуск оружия.
В УПМЦ5 (фиг. 2) параметры x(t) = xi(t) с первого входа поступают на вход БЗ6, обеспечивающего задержку сигнала X(t) на времена 0, τ1,..., τn. Пример технического выполнения БЗ6 приведен в книге [3] Н.М. Тетельбаума, Ю. Р. Шнейдера "400 схем для АВМ". Москва, Энергия, 1978 г., стр. 49.
Если X(t) представить в виде временного ряда
x(t) = a0 + a1t + ... + amtm, то

где коэффициенты a - постоянные величины.
Параметры x(t), ..., xn(t) с выхода БЗ6 поступают на вход БОФ7, (пример технического выполнения БОФ7 приведен, например, в книге [4] Э.Сейджа, Д. Мелса "Теория оценивания и ее применение в связи и управлении". Москва, Связь, 1976 г. , стр. 288), обеспечивающего оптимальное оценивание коэффициента  на фоне шумов, естественно присутствующих в сигналах x1, ..., xn. Оптимальные оценки
на фоне шумов, естественно присутствующих в сигналах x1, ..., xn. Оптимальные оценки  с выхода БОФ7 поступают на вход БЭ8, являющегося блоком формирования функций времени ([3], стр. 85), формирующим экстраполированные значения координат в текущее время
с выхода БОФ7 поступают на вход БЭ8, являющегося блоком формирования функций времени ([3], стр. 85), формирующим экстраполированные значения координат в текущее время

которые с выхода БЭ8 поступают на второй вход БУ11 и на первый вход БП9, на второй вход которого поступает сигнал "U" со второго входа УПМЦ5. БП9 является блоком памяти ([3], стр. 124), запоминающим в момент t = T появление команды U = -U0 (окончание функционирования ложной цели) значения X(T), X1(T), ..., Xn(T), которые с выхода БП9 поступают на вход блока компараторов БК12 ([3], стр. 112).
Параметры X(T) соответствуют местоположению ложной цели на момент времени T.
Параметры X1(T), ..., XK(T) соответствуют местоположению ложной цели до значения X(k+=1)(T), где ОПС1 еще сопровождает действительную цель, местоположение которой на момент T определяется параметрами X(k+1)(T), ..., Xn(T).
В БК12 по поступившим сигналам для параметров  формируются сигналы весовых коэффициентов λ = 0, λ1 = 0,..., λк = 0 и для параметров |x(T)-x(к+1)(T)| ≫ 0,..., |x(T)-xn(T)| ≫ 0, λ(к+1) = ... = λn = 1,
формируются сигналы весовых коэффициентов λ = 0, λ1 = 0,..., λк = 0 и для параметров |x(T)-x(к+1)(T)| ≫ 0,..., |x(T)-xn(T)| ≫ 0, λ(к+1) = ... = λn = 1,
которые с выхода БК12 поступают на первый вход БУ11 ([3], стр. 53), где формируются сигналы 
которые с выхода БУ11 поступают на вход С10 ([3], стр. 8) формирующего координаты вероятного местоположения действительной цели
где x(t) - действительное местоположение цели, 
Δ(к+1),..., Δn - погрешности экстраполяции.
С выхода С10 сигнал XB(t) поступают на выход УПМЦ5, с выхода которого сигнал XB(t) поступает на вход ОПС1 для наведения на действительную цель, параметры которой определены с точностью до малых величин погрешностей экстраполяции относительного движения цели, что свидетельствует о достижении технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232376C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2232377C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ГРУППЫ МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232102C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| ОБЗОРНО-ПРИЦЕЛЬНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2391262C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2000 |
|
RU2174932C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА | 1996 |
|
RU2089450C1 |
Изобретение может быть использовано в составе бортового оборудования, обеспечивающего наведение летательных аппаратов и применение оружия по обнаруженным целям. В прицельно-навигационный комплекс, содержащий обзорно-прицельную систему, формирования параметров индикации, управления, применения оружия, индикационно-отрабатывающую систему, информационную систему параметров движения летательного аппарата, дополнительно введено устройство прогнозирования местоположения цели, обеспечивающее наведение обзорно-прицельной системы на действительную цель после окончания функционирования ложной цели, что в результате повышает боевую эффективность летательных аппаратов, снабженных предлагаемым комплексом. 2 ил.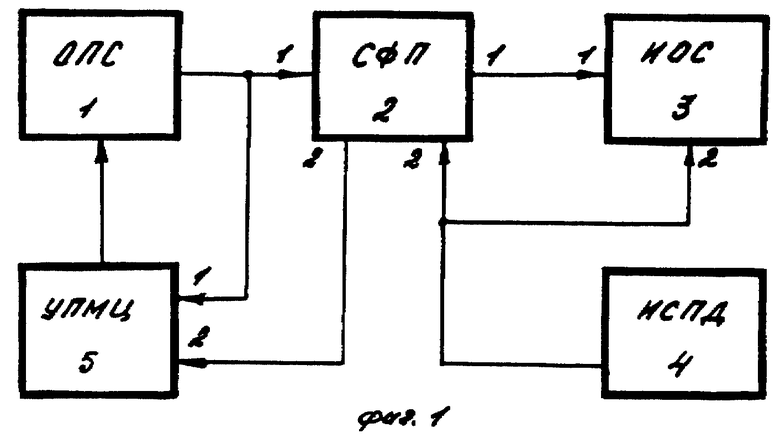
Прицельно-навигационный комплекс, содержащий последовательно соединенные обзорно-прицельную систему, систему формирования параметров индикации, управления, применения оружия и индикационно-отрабатывающую систему, а также информационную систему параметров движения летательного аппарата, выход которой подключен ко вторым входам системы формирования параметров индикации, управления, применения оружия и информационно-отрабатывающей системы, отличающийся тем, что в него дополнительно введено включенное между входом и выходом обзорно-прицельной системы устройство прогнозирования местоположения цели, на второй вход которого подключен второй выход системы формирования параметров индикации, управления, применения оружия, причем устройство прогнозирования местоположения цели выполнено на последовательно соединенных блоке запаздывания, блоке оптимальной фильтрации, блоке экстраполяции, блоке памяти, блоке компараторов, блоке умножения и сумматоре, выход которого подключен к выходу устройства прогнозирования местоположения цели, первый и второй входы которого подключены соответственно ко входу блока запаздывания и ко второму входу блока памяти, а на второй вход блока умножения подключен выход блока экстраполяции.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU 95103978 A1, 27.11.96 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 1995 |
|
RU2079109C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ВЕРТОЛЕТА ВСЕПОГОДНОГО И КРУГЛОСУТОЧНОГО ПРИМЕНЕНИЯ | 1997 |
|
RU2119646C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА ФУНКЦИОНАЛЬНУЮ АКТИВНОСТЬ КАННАБИНОИДНОГО РЕЦЕПТОРА | 2013 |
|
RU2557971C2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ГУЛЯШ СВИНОЙ С МАКАРОННЫМИ ИЗДЕЛИЯМИ" | 2011 |
|
RU2459453C1 |

