Изобретение относится к области устройств для измерений механических величин, в частности, к устройствам для измерения массы, координат центров масс и моментов инерции натурных летательных аппаратов их элементов.
Область применения - авиационная и космическая техника.
Измерение массово-инерционных характеристик натурных летательных аппаратов востребовано при разработке и испытаниях авиационной и космической техники. Под массово-инерционными характеристиками изделия понимаются: масса изделия, координаты центра масс, осевые и центробежные моменты инерции, образующие в совокупности полный тензор инерции. Знание данных параметров необходимо при формировании уравнений движения летательного аппарата для обеспечения оптимального управления его полетом.
Известны стенды - аналоги для измерения массово-инерционных характеристик изделий (патент на изобретение №2368880, МПК G01M 1/10, 2008; патент на изобретение №2434213, МПК G01M 1/10, 2010; патент на изобретение №2506551, МПК G01M 1/10, 2012; патент на изобретение №2562273, МПК G01M 1/10, 2013). Эти стенды имеют два режима работы - статический и динамический.
В статическом режиме измеряются масса изделия и три координаты центра масс изделия. Изделие устанавливается на динамометрическую платформу, которая опирается на несколько динамометров или на грузоприемную платформу, закрепленную на пятикомпонентном динамометрическом элементе (ПДЭ). Горизонтальные координаты центра масс определяются по измеренным динамометрами или ПДЭ силам. Для измерения вертикальной координаты изделия при помощи узла поворота задается ряд последовательных углов наклона. По измеренным при помощи динамометров или ПДЭ моментам и измеренным углам наклона определяется вертикальная координата центра масс изделия.
Моменты инерции измеряются в динамическом режиме. При этом изделие, закрепленное на динамометрической или грузоприемной платформе, совершает свободные затухающие колебания последовательно вокруг трех ортогональных осей устройства, с помощью системы пространственных сварных рам. Рамы связаны между собой по принципу качелей через специальные стойки так, чтобы обеспечить последовательное раскачивание вокруг трех ортогональных осей устройства. При помощи динамометрической платформы, закрепленной на нескольких динамометрах, или грузоприемной платформы, закрепленной на ПДЭ, измеряются три динамических момента, по которым, используя данные датчиков угла поворота, установленных на осях, известные массу и координаты центра масс, определяются (вычисляются) моменты инерции изделия.
К недостаткам подобных устройств относится ограниченный диапазон размеров по ширине и глубине изделия из-за наличия в конструкции стенда стоек рам, расположенных по периметру стенда так, что ось колебаний рам проходит выше или на одном уровне с плоскостью динамометрической или грузоприемной платформы. Кроме того, такое расположение стоек обуславливает и способ установки изделия на устройство: для установки необходимо с помощью грузоподъемных механизмов поднять изделие над стойками и опустить ниже их высоты на динамометрическую или грузоприемную платформу, что в совокупности с размерами изделия и системы пространственных рам увеличивает потребную высоту потолка помещения.
Требуемые габаритные параметры перспективных натурных изделий аэрокосмической промышленности в совокупности с техническими ограничениями предполагаемых мест размещения стендов для измерения массы, координат центра масс и моментов инерции обуславливают необходимость и актуальность решения задачи по расширению диапазонов возможных геометрических размеров изделия по ширине и глубине без изменения габаритных, а также точностных характеристик стендов, которые определяются точностными характеристиками ПДЭ, динамометров, датчиков угла поворота и датчиков угловых ускорений.
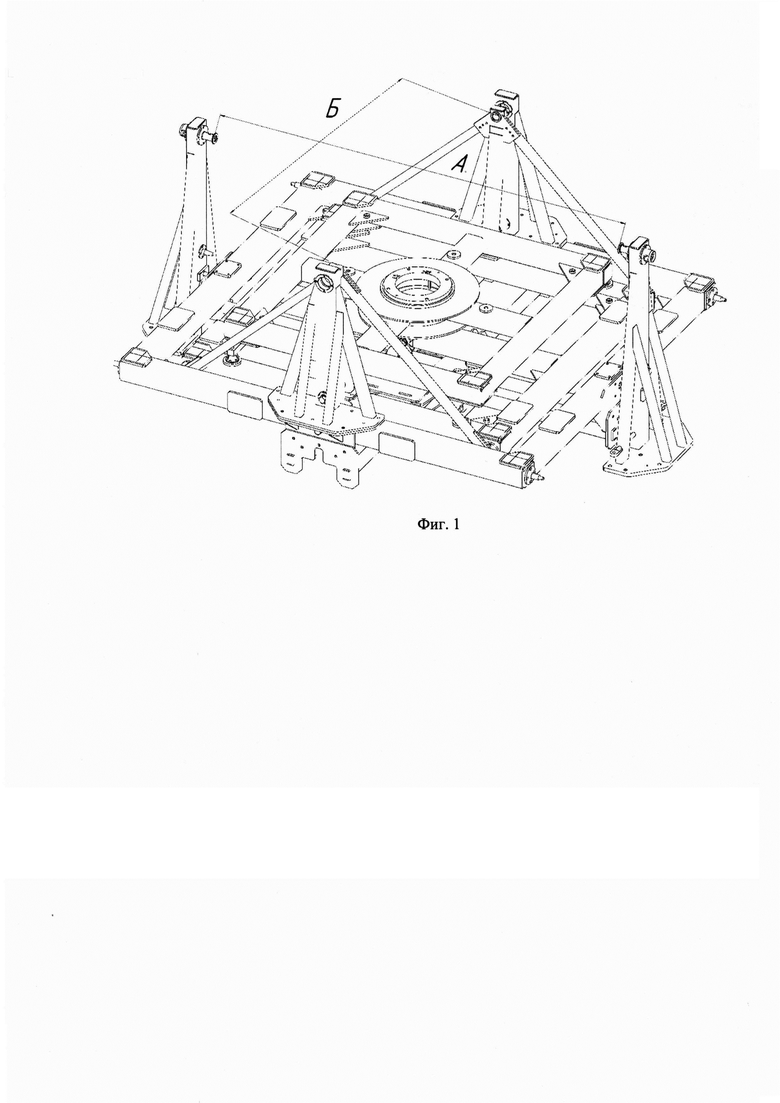
Наиболее близким техническим решением является стенд для измерения массово-инерционных характеристик физических объектов (патент на изобретение №2562445, МПК G01M 1/10, 2013). Кинематическая схема стенда предполагает размещение изделия между стойками, обеспечивающими колебания изделия вокруг осей Y и Z, что ограничивает максимальные размеры изделия по ширине и глубине из-за конструкции, имеющей стойки в вертикальной плоскости для колебаний изделия вокруг этих осей, с размерами А и Б между стойками, как показано на фигуре 1.
Стенд для измерения массово-инерционных характеристик изделия представляет собой измерительное устройство, содержащее динамометры, датчики угла поворота, трехосевой датчик угловых ускорений (ТДУУ), пружины, станину, грузоприемную платформу, устройства задания колебаний, состоящие из подвижных рам, соединенных между собой и со станиной шарнирами и системой пружин, соединенных с рамами, при этом оси шарниров соединены с осями датчиков угла поворота. Стенд снабжен фиксаторами, обеспечивающими колебания изделия только вокруг той оси, относительно которой одновременно выполняется измерение момента инерции, и ПДЭ, состоящим из четырех стоек квадратного сечения, ориентированных вдоль координатных осей стенда, верхнего основания, на которое установлено изделие посредством крестовины, и нижнего основания, закрепленного на динамометрической платформе.
Техническим результатом предлагаемого решения является расширение диапазона по ширине и глубине изделий, массово-инерционные параметры которых измеряются на стенде без снижения точности измерений.
Технический результат достигается тем, что стенд для измерения массы, координат центров масс и моментов инерции изделий оборудован ПДЭ, ТДУУ, датчиками угла поворота и динамометрами, содержащий станину, поворотную раму, с размещенным на ней датчиком угла поворота и соединенную со станиной поворотным узлом и системой пружин, для обеспечения последовательных колебаний вокруг трех ортогональных осей грузоприемной платформы с изделием, весовую раму, соединенную с поворотной рамой посредством динамометров.
Стенд дополнительно оборудован механизмом поворота и раскачки грузоприемной платформы, размещенным на весовой раме и связанным с ней посредством опорных стоек и пружин и состоящим из:
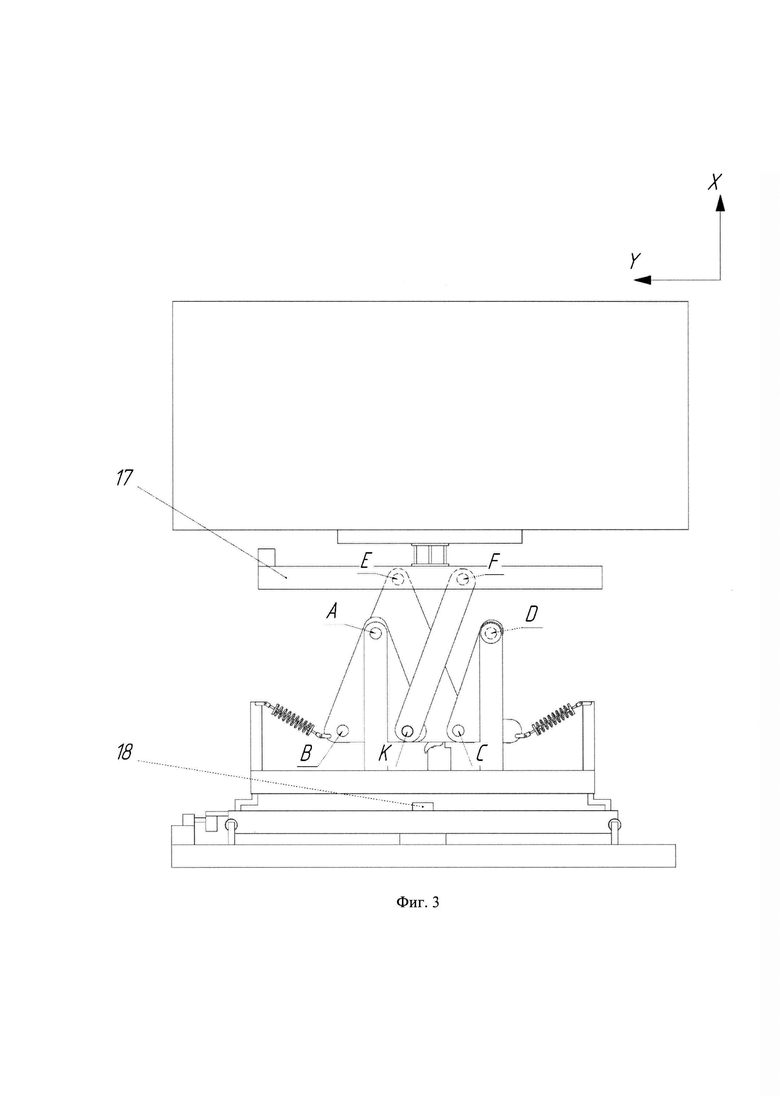
- двух соединительных пластин, по краям которых размещены шарниры F, K и D, С;
- двух соединительных пластин в форме треугольников, в углах которых размещены шарниры А, В, K и В, Е, С;
- стола, на котором размещены шарниры Е и F и размещен ТДУУ, стол соединен с грузоприемной платформой через ПДЭ.
Все элементы механизма поворота и раскачки кинематически связаны между собой посредством шарниров по схеме, состоящей из двух параллелограммов ABCD и BEFK следующим образом:
- опорные узлы параллелограмма ABCD находятся в неподвижных верхних частях опорных стоек, где размещены шарниры А и D, при этом на одной из стоек также расположен датчик угла поворота;
- сторона АВ пластины ABK является стороной параллелограмма ABCD, а вторая сторона BK - стороной параллелограмма BEFK;
- сторона ВС пластины ВЕС является связующим звеном между треугольником АВК в соединительном шарнире В и пластиной DC в соединительном шарнире С;
- пластина FK, являясь стороной параллелограмма BEFK, связывает пластину ABK в соединительном шарнире K и стол в соединительном шарнире F, а пластина ВЕС также связана со столом в соединительном шарнире Е.
Предлагаемое техническое решение иллюстрируется следующими фигурами.
На фиг. 1 представлен стенд-прототип;
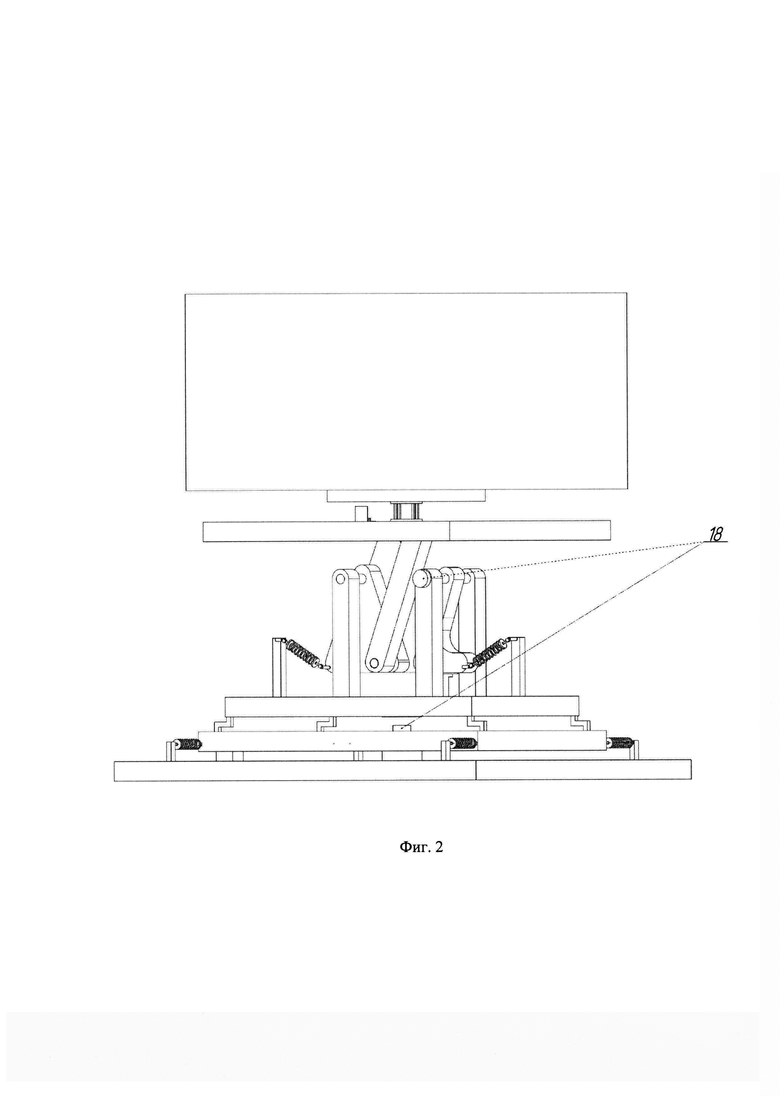
на фиг. 2 представлен аксонометрический вид заявляемого стенда;
на фиг. 3 представлен вид спереди конструкции заявляемого стенда;
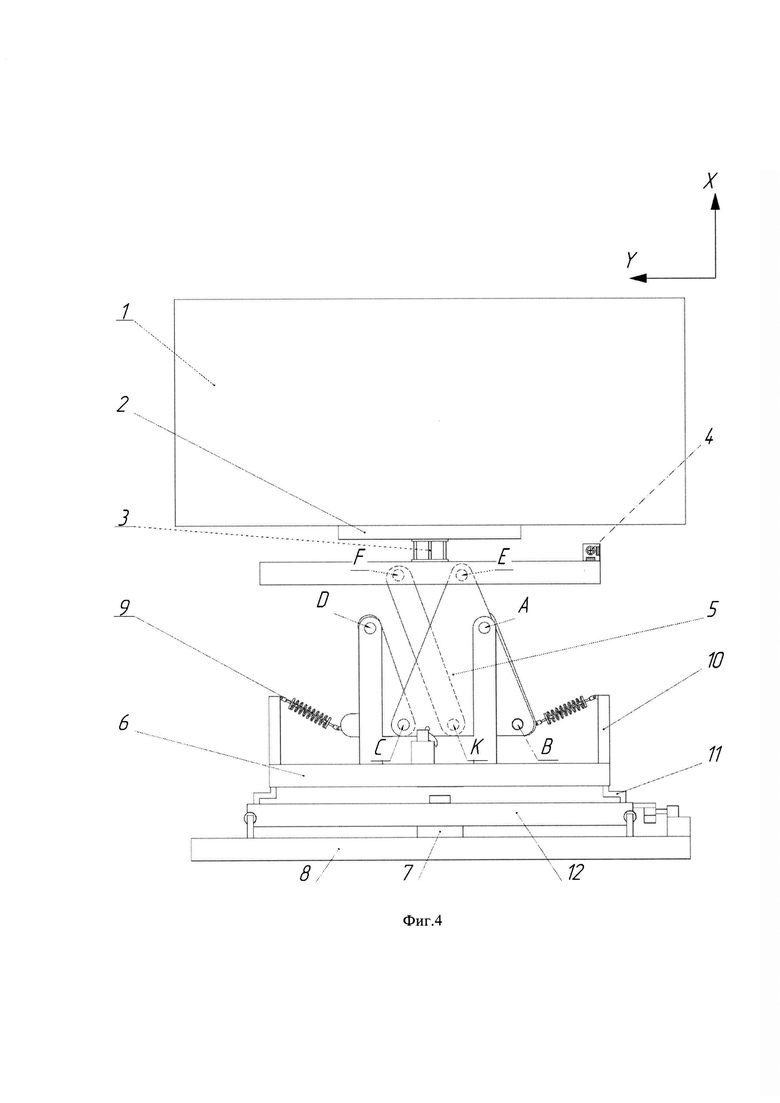
на фиг. 4 представлен вид сзади конструкции заявляемого стенда;
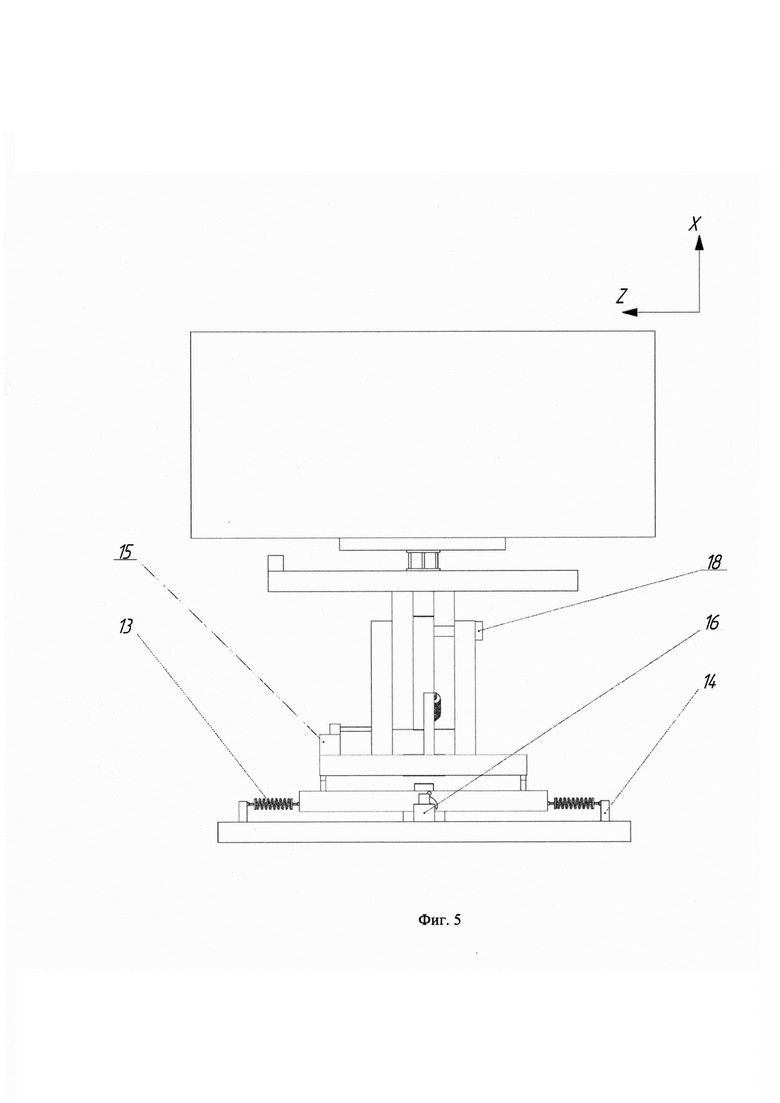
на фиг. 5 представлен вид сбоку конструкции заявляемого стенда;
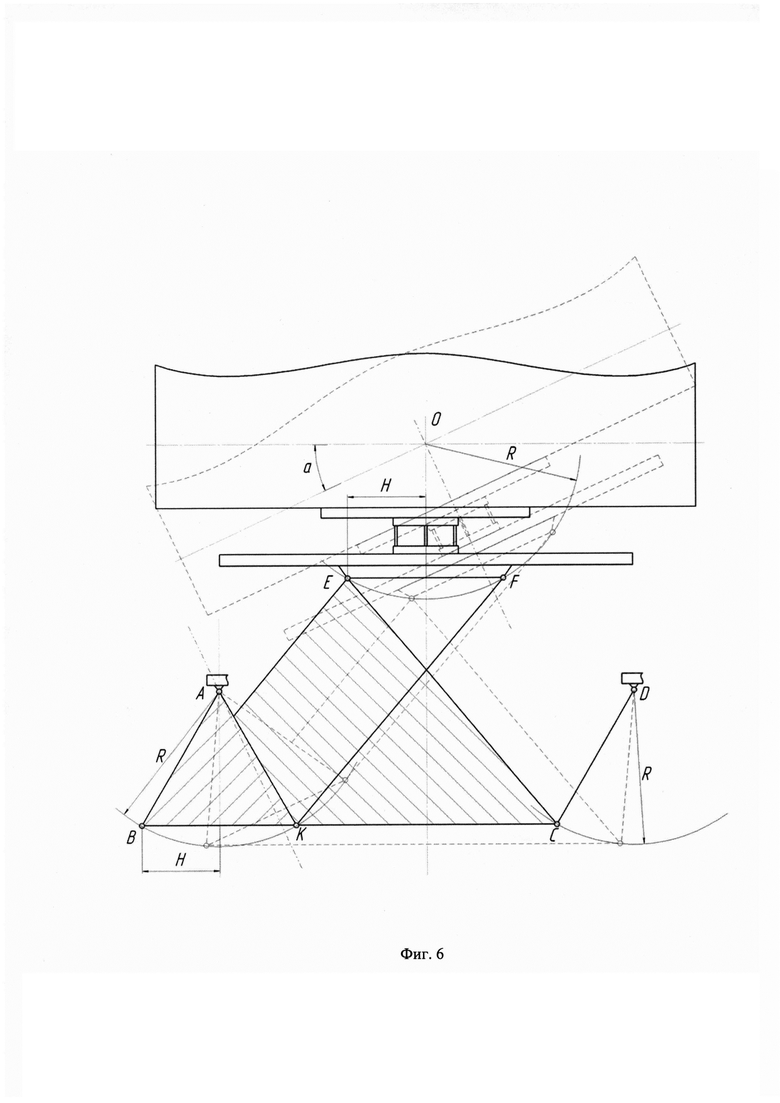
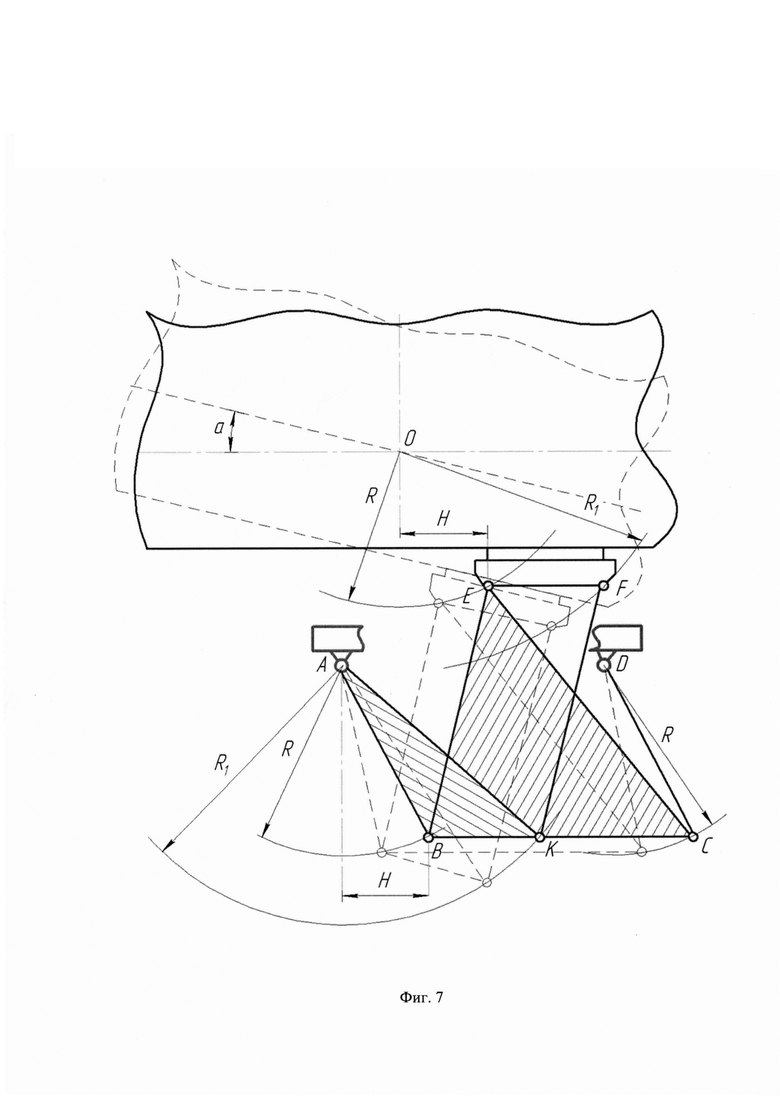
на фиг. 6 и 7 представлен кинематический принцип работы механизма поворота и раскачки грузоприемной платформы заявляемого стенда.
Позициями на чертежах обозначены:
1 - изделие;
2 - грузоприемная платформа;
3 - ПДЭ;
4 - ТДУУ;
5 - механизм поворота и раскачки грузоприемной платформы;
6 - весовая рама;
7 - поворотный узел;
8 - основание стенда (станина);
9, 13 - пружины;
10, 14 - стойки;
11 - динамометры;
12 - поворотная рама;
15, 16 - электромеханические приводы;
17 - стол механизма поворота и раскачки грузоприемной платформы;
18 - датчики угла поворота.
Изделие 1 закреплено на грузоприемной платформе 2, которая соединена со столом 17 через ПДЭ 3.
ПДЭ состоит из четырех стоек квадратного сечения, ориентированных вдоль координатных осей стенда, верхнего основания, на которое установлено изделие посредством грузоприемной платформы 2, и нижнего основания, закрепленного на столе 17, на гранях каждой стойки у верхнего основания и у нижнего основания наклеены тензорезисторы, соединенные в пять мостов для измерения моментов MX, MY, MZ и двух боковых сил QY и QZ.
На столе 17 установлен ТДУУ 4, который в совокупности с ПДЭ 3 участвует в измерении координат центра масс и моментов инерции. Принципы измерения координат центра масс и моментов инерции осуществляются за счет свободных колебаний с помощью системы пружин 9 и 13, закрепленных на стойках 10 и 14. Для запуска свободных колебаний используются электромеханические приводы 15 и 16 с оживальным кулачком.
Измерение массы изделия осуществляется с помощью весовой рамы 6, которая установлена на четыре динамометра 11. Динамометры 11 опираются на поворотную раму 12, которая обеспечивает колебания вокруг оси X. Поворотная рама 12, на которой размещен датчик угла поворота, связана с основанием 8 стенда через поворотный узел 7, который обеспечивает колебания поворотной рамы 12 вокруг оси X. Для осуществления колебаний на механизме поворота и раскачки грузоприемной платформы 5 по двум осям Y и Z предусмотрен поворот изделия на 90 градусов вокруг оси X.
В качестве материалов для изготовления механизма поворота и раскачки грузоприемной платформы 5 могут быть использованы, например, металлические полые трубы и листовой металл стандартных размеров по сортаменту ГОСТ. Конкретные размеры механизма 5 определяются по конструктивно-технологическим соображениям в зависимости от массово-габаритных размеров проектируемого стенда.
В статическом режиме измеряют массу изделия 1, установленного на грузоприемную платформу 2, которая опирается на четыре динамометра 11 через весовую раму 6, механизм поворота и раскачки грузоприемной платформы 5 и ПДЭ 3. Также в статическом режиме измеряют горизонтальные координаты центра масс, определяемые по измеренным динамометрами силам и вертикальные координаты изделия при помощи механизма поворота и раскачки грузоприемной платформы 5, задающего ряд последовательных углов наклона, что в совокупности с измеренными моментами с помощью ПДЭ 3, определяет вертикальную координату центра масс изделия.
В динамическом режиме, измеряют моменты инерции, при этом изделие, закрепленное на грузоприемной платформе, совершает свободные затухающие колебания последовательно вокруг трех ортогональных осей устройства, с помощью поворотной рамы 12, на которую опираются динамометры 11 весовой рамы 6. Рамы связаны между собой по принципу качелей через стойки и пружины так, чтобы обеспечить последовательное раскачивание вокруг трех ортогональных осей устройства. При помощи ПДЭ 3 измеряются три динамических момента, по которым, при помощи аппарата цифровой обработки сигналов, определяются моменты инерции изделия. При этом также используются данные датчиков угла поворота 18, установленных на осях механизма 5 и поворотного узла 7 и данные ТДУУ 4, а также известные масса и координаты центра масс.
Измерения проводятся в следующем порядке: изделие 1 устанавливают и закрепляют на грузоприемной платформе 2 стенда, после чего оператор запускает программу измерения в специальном программном обеспечении на рабочем месте оператора стенда, которое включает в себя персональный компьютер, подключенный к измерительно-вычислительному управляющему комплексу стенда. Программа измерения последовательно в автоматическом режиме измеряет массу изделия и три координаты центра масс в статическом режиме. После измерения в статическом режиме программа измерения переходит к измерениям в динамическом режиме, давая последовательно команду на приводы 15 и 16 для осуществления последовательных затухающих колебаний вокруг трех ортогональных осей. При колебаниях вокруг одной оси две другие необходимо арретировать. После завершения динамического режима измерений программа выдает протокол измерения, который и является результатом работы стенда по измерению массы, координат центра масс и моментов инерции изделий.
Схема механизма поворота и раскачки грузоприемной платформы 2, представленная на фиг. 6 и 7 состоит из двух параллелограммов:
I - ABCD (AB=CD; AD=BC);
II - BEFK (BK=EF; BE=KF).
Опорные узлы параллелограмма I находятся в неподвижных точках А и D. Звено ABK является жестким треугольником, одна сторона которого АВ является стороной параллелограмма I, а вторая сторона BK - стороной параллелограмма II. Связь звеньев АВ и DC параллелограмма I осуществляется треугольником ВЕС, сторона которого ВС служит соединительным звеном ВС звеньев АВ и DC, а сторона BE является стороной параллелограмма II. Звено EF параллелограмма II представляет собой стол механизма поворота и раскачки, на который опирается грузоприемная платформа 2 с изделием 1 через ПДЭ 3. На стол EF устанавливается ТДУУ 4.
При перемещении параллелограмма II шарниры В и С будут описывать кривые радиуса R с центрами вращения в точках А и D. При этом шарнир в точке Е, расположенный на жестком звене ВЕС, также будет описывать кривую с радиусом R, описываемую из центра вращения О. В тоже время точка K будет перемещаться по радиусу R1 и в соответствии с этим точка F - также по радиусу R1, описанному из центра О.
Угол наклона стержней параллелограмма I и II выбирается из условий компоновки механизма и диапазона положительных и отрицательных углов α изменений положения изделия. Расположение центра вращения изделия относительно опорных узлов параллелограмма I выбирается таким образом, чтобы смещение точки Е относительно вертикали, проходящей через центр вращения О, и точки В относительно вертикали, проходящей через ось опорного узла А параллелограмма I было равно Н. При Н=0 ось вращения О лежит на вертикали, проходящей через ось опорного узла А параллелограмма I.
Таким образом, использование стенда для измерения массы, координат центров масс и моментов инерции изделий, снабженного предложенным механизмом поворота и раскачки грузоприемной платформы, обеспечивающим колебания вокруг осей Y и Z, при сохранении основных узлов и агрегатов прототипа, в том числе датчиков углов поворота, ТДУУ и ПДЭ, позволяет расширить диапазон по ширине и глубине изделий, устанавливаемых на стенды для измерения массы, координат центра масс и моментов инерции без изменения точностных характеристик стенда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для измерения массы, координат центра масс и моментов инерции изделий | 2024 |
|
RU2830397C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2012 |
|
RU2593644C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЙ | 2013 |
|
RU2525629C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ | 2013 |
|
RU2562273C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2596032C2 |
| Комплекс для определения инерционных характеристик с измерительной системой | 2017 |
|
RU2683800C2 |
Изобретение относится к области устройств для измерений механических величин, в частности к устройствам для измерения массы, координат центров масс и моментов инерции натурных летательных аппаратов их элементов. Предложен стенд для измерения массы, координат центров масс и моментов инерции изделий, оборудованный пятикомпонентным динамометрическим элементом (ПДЭ), трехосевым датчиком углового ускорения (ТДУУ), датчиками угла поворота и динамометрами. Устройство содержит станину, поворотную раму, с размещенным на ней датчиком угла поворота и соединенную со станиной поворотным узлом и системой пружин. Для обеспечения последовательных колебаний вокруг трех ортогональных осей грузоприемной платформы с изделием и весовую раму, соединенную с поворотной рамой посредством динамометров. Дополнительно стенд оборудован механизмом поворота и раскачки грузоприемной платформы, размещенным на весовой раме и связанным с ней посредством опорных стоек и пружин, и состоящим из четырех соединительных пластин и стола с размещенным на нем ТДУУ и соединенного с грузоприемной платформой через ПДЭ. Технический результат заключается в расширении диапазона по ширине и глубине изделий, массово-инерционные параметры которых измеряются на стенде без снижения точности измерений. 7 ил. 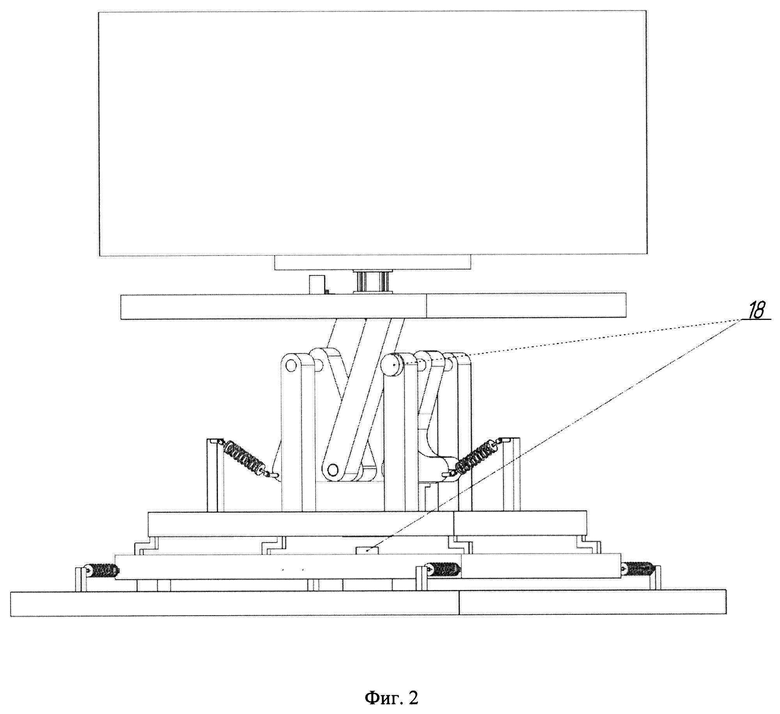
Стенд для измерения массы, координат центров масс и моментов инерции изделий, оборудованный пятикомпонентным динамометрическим элементом (ПДЭ), трехосевым датчиком углового ускорения (ТДУУ), датчиками угла поворота и динамометрами, содержащий станину, поворотную раму, с размещенным на ней датчиком угла поворота и соединенную со станиной поворотным узлом и системой пружин, весовую раму, соединенную с поворотной рамой посредством динамометров, отличающийся тем, что стенд дополнительно оборудован механизмом поворота и раскачки грузоприемной платформы, размещенным на весовой раме и связанным с ней посредством опорных стоек и пружин, и состоящим из:
- двух соединительных пластин, по краям которых размещены шарниры F, K и D, С;
- двух соединительных пластин в форме треугольников, в углах которых размещены шарниры А, В, K и В, Е, С;
- стола, на котором размещены шарниры Е и F и размещен ТДУУ, стол соединен с грузоприемной платформой через ПДЭ,
при этом все элементы механизма поворота и раскачки кинематически связаны между собой посредством шарниров по схеме, состоящей из двух параллелограммов ABCD и BEFK следующим образом:
- опорные узлы параллелограмма ABCD находятся в неподвижных верхних частях опорных стоек, где размещены шарниры А и D, при этом на одной из стоек также расположен датчик угла поворота;
- сторона АВ пластины ABK является стороной параллелограмма ABCD, а вторая сторона BK - стороной параллелограмма BEFK;
- сторона ВС пластины ВЕС является связующим звеном между треугольником ABK в соединительном шарнире В и пластиной DC в соединительном шарнире С;
- пластина FK, являясь стороной параллелограмма BEFK, связывает пластину ABK в соединительном шарнире K и стол в соединительном шарнире F, а пластина ВЕС также связана со столом в соединительном шарнире Е.
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ | 2013 |
|
RU2562273C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА В ЗАДАННОЙ ПЛОСКОСТИ | 2010 |
|
RU2448336C2 |
