Изобретение относится к области автоматизации технологических процессов при наземных испытаниях жидкостных ракетных двигателей, двигательных установок космических аппаратов и блоков ракет-носителей и может быть использовано в химической и нефтегазовой промышленности.
При этом наиболее сложными объектами автоматизации испытаний ракетно-космической техники (РКТ) являются блоки ракет-носителей и их связки, при испытании которых система управления стендом должна взаимодействовать как с системой телеметрических измерений, так и с системой управления изделием, включающей в себя приборы штатной бортовой автоматики. Эта система обеспечивает на изделии поддержание и регулирование по заданным циклограммам параметров давления, соотношения расходов компонентов топлива, тяги, перемещения (качания) камер сгорания двигателей, а также аварийную защиту согласно алгоритмам диагностики функционирования изделия при его огневом запуске. Система управления изделием является ведущей по отношению к системе управления стендом с помощью передачи в нее координирующих команд. По этим и другим функциональным задачам система управления стендом аналогична автоматизированным системам управления технологическими процессами хранения компонентов топлива и заправки ими баков ракет-носителей на стартах космодромов, где также возникают и реализуются задачи координации работы систем с помощью бортовой автоматики и космодромных автоматизированных систем подготовки и пуска (АСУПП). Аналогия стендовых и стартовых систем управления подкрепляется тенденцией испытания ракет-носителей совместно со штатной наземной пневмоавтоматикой.
Известна автоматизированная резервированная система управления заправкой криогенного разгонного блока по патенту Российской Федерации N2084011, МПК G05B 9/03, 1995 г., содержащая локальные устройства управления, в состав которых входят три контроллера и устройства ввода-вывода дискретной и аналоговой информации, резервированную сеть связи, соединяющую первые входы-выходы контроллеров локальных устройств управления, автоматизированные рабочие места операторов, соединенные через сеть верхнего уровня с комплектом автоматизированных рабочих мест инженеров, связанным с внешней автоматизированной координирующей системой управления, волоконно-оптические кабели и сетевые коммутаторы.
Локальные устройства управления выделены для подсистем компонентов топлив: жидкого водорода, жидкого кислорода, жидкого азота и газов. Система обеспечивает наращивание числа локальных устройств управления без значительной потери быстродействия системы. Однако для реализации перечисленных задач стенда эта система имеет неприемлемо большое время реакции на изменение значений сигналов датчиков, подключенных к входам системы. Это время практически составляет сотни миллисекунд, при требуемых на стенде 10-20 мс. Такое требование связано с участием автоматизированной резервированной системы управления стендом для испытаний ракетно-космической техники в обеспечении выхода из аварийных ситуаций. Недостаточное быстродействие известной системы связано с использованием интерфейсов с относительно небольшой пропускной способностью (типа RS-422) и процедурой синхронизации работы контроллеров при последовательной передаче информации от первого контроллера ко второму, от второго - к третьему и от третьего снова к первому контроллеру. В этом обмене информацией участвуют еще несколько дополнительных контроллеров, связанных с основным контроллером, реализующим программу управления, через системную шину. Это тоже требует времени. Принятый способ синхронизации контроллеров по отдельным выделенным точкам программы управления по сигналу прерываний выделенного одного контроллера из трех и получению сигналов готовности, во-первых, также требует дополнительного времени, а во-вторых, является недостаточным для синхронной выдачи, например, импульсных команд (длительностью в десятки миллисекунд) на приводы регуляторов. Для стендов из опыта проведения испытаний различных изделий РКТ необходимо строго синхронное выполнение программы управления контроллерами троированной системы в каждом такте их работы длительностью 10-20 мс, чтобы не пропустить ни одной команды и не разойтись контроллерам по различным «веткам» программы управления. Рассинхронизация контроллеров полностью может нарушить функционирование системы. Типичным примером является формирование импульсной команды на выходе системы. Резервированная троированная система работает по мажоритарному принципу голосования 2 из 3, и, если импульсы включения какого-то выхода придут из трех контроллеров системы в разное время, то на этом выходе эта команда программы управления будет отсутствовать, что является отказом системы и может привести к серьезным последствиям, так как технология работ на стенде связана с использованием взрывоопасных веществ. Таким образом, относительно низкое быстродействие известной системы существенно снижает ее надежность.
Техническая задача, решаемая изобретением, заключается в повышении быстродействия и надежности системы.
Это достигается тем, что в известной автоматизированной резервированной системе управления стендом для испытаний ракетно-космической техники, содержащей локальные устройства управления, в состав которых входят три контроллера и устройства ввода-вывода дискретной и аналоговой информации, резервированную сеть связи, соединяющую первые входы-выходы контроллеров локальных устройств управления, автоматизированные рабочие места операторов, соединенные через сеть верхнего уровня с комплектом автоматизированных рабочих мест инженеров, связанным с внешней автоматизированной координирующей системой управления, два волоконно-оптических кабеля и четыре сетевых коммутатора, согласно изобретению, в систему введены блок синхронизации, подключенный к резервированной сети связи, и две дублирующие друг друга сети оперативного управления, первая из которых соединяет четвертые входы-выходы контроллеров через последовательно соединенные первый сетевой коммутатор, первый волоконно-оптический кабель и третий сетевой коммутатор с первыми входами-выходами автоматизированных рабочих мест операторов, а вторая соединяет пятые входы-выходы контроллеров через последовательно соединенные второй сетевой коммутатор, второй волоконно-оптический кабель и четвертый сетевой коммутатор со вторыми входами-выходами автоматизированных рабочих мест операторов, в состав локальных устройств управления включены первый, второй и третий адаптеры SpaceWire, которые соединяют второй вход-выход соответственно первого, второго и третьего контроллеров с первым, вторым и третьим входами-выходами устройства ввода-вывода дискретной информации, а также первый, второй и третий адаптеры CAN, которые соединяют третий вход-выход соответственно первого, второго и третьего контроллеров с первым, вторым и третьим входами-выходами устройства ввода-вывода аналоговой информации, седьмой вход-выход первого контроллера локального устройства управления соединен первым интерфейсом SpaceWire с шестым входом-выходом второго контроллера, седьмой вход-выход которого соединен вторым интерфейсом SpaceWire с шестым входом-выходом третьего контроллера, седьмой вход-выход которого соединен третьим интерфейсом SpaceWire с шестым входом-выходом первого контроллера.
На чертеже представлена схема системы.
Система содержит локальные устройства управления 1-1,…, 1-N, в каждое из которых входят первый, второй и третий контроллеры 2-1, 2-2 и 2-3, подключенные первыми входами-выходами к резервированной сети связи 3 для обмена информацией между ними и блоку синхронизации 4, который является источником сигналов единого времени для контроллеров 2-1, 2-2 и 2-3 во всех локальных устройствах управления. В состав последних входят также устройство ввода-вывода дискретной информации 6, соединенное первым, вторым и третьим входами-выходами соответственно через адаптеры SpaceWire 5-1, 5-2 и 5-3 со вторыми входами-выходами соответственно контроллеров 2-1, 2-2 и 2-3, и устройство ввода-вывода аналоговой информации 8, соединенное первым, вторым и третьим входами-выходами соответственно через адаптеры CAN 7-1, 7-2 и 7-3 с третьими входами-выходами соответственно контроллеров 2-1, 2-2 и 2-3. Устройство ввода-вывода обеспечивает мажоритирование сигналов из контроллеров 2-1, 2-2 и 2-3, их усиление и связь с объектом испытаний соответственно по дискретным и аналоговым входам-выходам. Мажоритирование аналоговой информации реализуется отбрасыванием наименьшего и наибольшего значений.
Четвертые и пятые входы-выходы контроллеров 2-1, 2-2 и 2-3 подключены соответственно к первой и второй сетям оперативного управления 9-1 и 9-2, которые соответственно через первый и второй сетевые коммутаторы 10-1 и 10-2, волоконно-оптические кабели 11-1 и 11-2 и третий и четвертый сетевые коммутаторы 12-1 и 12-2 соединены с автоматизированными рабочими местами (АРМ) операторов 13-1,…, 13-М, подключенные также к сети верхнего уровня 14 с подсоединенным к ней комплектом автоматизированных рабочих мест инженеров 15, имеющим связь с внешней автоматизированной координирующей системой управления. АРМ операторов 13-1,…, 13-N служат для выдачи команд оперативного управления с пульта на базе ПЭВМ по указанию ведущих инженеров и в соответствии с заданием на испытание и необходимой реакцией на нештатные ситуации на стенде. Комплект АРМ инженеров 15 служит для контроля состояния систем стенда и протекающих в них физических процессов. АРМ операторов 13-1,…, 13-N выполняют также функции обслуживания контроллеров 2-1, 2-2 и 2-3 и контроля функционирования устройств системы.
Каждый из трех контроллеров 2-1, 2-2 и 2-3 шестым и седьмым входами-выходами соединены друг с другом интерфейсами SpaceWire 16-1, 16-2 и 16-3 следующим образом. Седьмой вход-выход первого контроллера 2-1 локального устройства управления соединен первым интерфейсом SpaceWire 16-1 с шестым входом-выходом второго контроллера 2-2, седьмой вход-выход которого соединен вторым интерфейсом SpaceWire 16-2 с шестым входом-выходом третьего контроллера 2-3, седьмой вход-выход которого соединен третьим интерфейсом SpaceWire 16-3 с шестым входом-выходом первого контроллера 2-1.
В исходном состоянии контроллеры 2-1, 2-2 и 2-3 загружены из автоматизированных рабочих мест операторов 13-1,…, 13-М программой управления, реализующей задание на испытание изделия. В процессе проведения испытания контроллеры 2-1, 2-2 и 2-3 со второго входа-выхода выдают команды через адаптеры SpaceWire 5-1, 5-2 и 5-3 в устройство ввода-вывода дискретной информации 6 и значения аналоговых выходов с третьего входа-выхода в устройство ввода-вывода аналоговой информации 8 через адаптеры CAN 7-1, 7-2 и 7-3 - соответственно. Аналогично, но в обратном направлении контроллеры 2-1, 2-2 и 2-3 получают входную для программы дискретную и аналоговую информацию.
Входной информацией для программы управления являются также команды внешней автоматизированной координирующей системы управления, подключенной к АРМ инженеров 15, и команды операторов, формируемые в АРМ операторов 13-1,…, 13-М в центре управления испытаниями. Эти команды передаются в контроллеры 2-1, 2-2 и 2-3 по двум дублирующим друг друга путям. Первый - с первых входов-выходов АРМ операторов 13-1,…, 13-М через третий сетевой коммутатор 12-1, волоконно-оптический кабель 11-1, первый сетевой коммутатор 10-1 и сеть оперативного управления 9-1, к которой подсоединены четвертые входы-выходы контроллеров 2-1, 2-2 и 2-3 каждого из локальных устройств управления 1-1,…1-N. Второй путь - со вторых входов-выходов АРМ операторов 13-1,…, 13-М, через четвертый сетевой коммутатор 12-2, волоконно-оптический кабель 11-2, второй сетевой коммутатор 10-2 и сеть оперативного управления 9-2, к которой подсоединены пятые входы-выходы всех контроллеров.
Связь контроллеров 2-1, 2-2 и 2-3 с АРМ операторов 13-3,…, 13-М является двухсторонней и служит также для отображения оператором реализации команд управления и состояния системы. Типичным набором локальных устройств управления для стенда испытаний блоков ракет-носителей является следующий: 1-1 - управление оборудованием хранения компонентов топлив; 1-2 - управление режимами заправки и термостатирования изделия; 1-3 - управление оборудованием схемы «стенд-борт» подачи газов на изделие, аварийных сливов компонентов, аварийных наддувов и разгерметизации. Возможен вариант специализации локальных устройств управления по компонентам топлива, как это сделано в известной системе.
АРМ операторов 13-1,…, 13-М имеют выходы также в сеть верхнего уровня 14, к которой подключен комплект автоматизированных рабочих мест инженеров 15, через который обеспечивается одновременно связь с внешней автоматизированной координирующей системой управления, осуществляющей функции координации работ систем стенда.
Контроллеры 2-1, 2-2 и 2-3 локального устройства управления 1-1 и аналогичных им контроллеров в остальных локальных устройствах управления соединены с резервированной сетью связи 3 для взаимного обмена информацией между локальными устройствами управления 1-1,…, 1-N, что неизбежно при разделении на части общего алгоритма управления стендом. Обмен командами и сигналами между локальными устройствами управления 1-1,…, 1-N может реализовываться также через устройства ввода-вывода дискретной 6 и аналоговой 8 информации. Например, локальное устройство управления 1-1 может выдавать в остальные локальные устройства управления команду «Пуск» через устройство ввода-вывода дискретной информации 6.
По резервированной сети связи 3 обеспечивается также синхронизация времени работы контроллеров, отсчитываемого от команды «Пуск». Для этого в резервированную сеть связи 3 включен блок синхронизации 4, который получает сигналы точного времени из глобальной навигационной системы связи (GPS/Глонасс) и передает в контроллеры 2-1, 2-2 и 2-3 импульсы времени, например, через каждую секунду.
Для исключения рассинхронизации работы контроллеров 2-1, 2-2 и 2-3 предусмотрен в системе одновременный в каждом такте работы контроллеров 2-1, 2-2 и 2-3 обмен и выравнивание оперативно меняющейся информации в их памяти по интерфейсам SpaceWire 16-1, 16-2 и 16-3, соединяющим попарно контроллеры 2-1, 2-2 и 2-3. Сначала происходит прием каждым контроллером значений принятых соседними контроллерами дискретных входов и формирование в массиве значений входов с помощью операции мажоритирования трех логических переменных. Таким образом в контроллерах 2-1, 2-2 и 2-3 получаются одинаковые массивы значений входов, с которыми затем производятся логические и вычислительные операции по программе испытаний в данном такте работы контроллеров 2-1, 2-2 и 2-3. Образующиеся в результате выполнения программы управления значения внутренних логических переменных и выходов системы также выравниваются аналогичной операцией мажоритирования и затем значения выходов транслируются в устройство ввода-вывода дискретной информации 6. Кроме функции мажоритирования сигналов трех контроллеров 2-1, 2-2 и 2-3 в устройстве ввода-вывода дискретной информации 6 предусмотрена процедура перехода на работу от одного из работоспособных контроллеров, в случае отказа одного из контроллеров. Отказ идентифицируется самодиагностикой контроллеров, информация об этом передается в устройство ввода-вывода дискретной информации 6 для реализации указанной процедуры перехода.
С учетом расхождения частот задающих генераторов в контроллерах 2-1, 2-2 и 2-3 через резервированную сеть связи 3 реализуется по команде ведущего контроллера 2-1 выравнивание начала каждого такта во всех контроллерах. В случае отказа контроллера 2-1 эта функция автоматически передается следующему контроллеру 2-2, аналогично может эта функция передаваться от контроллера 2-2 к контроллеру 2-1 и т.д.
Выравнивание аналоговой информации выполняется формированием требуемых по программе управления логических функций сравнения значений аналоговых величин или функций от них с уставками, а затем выполнение описанной операции выравнивания.
Повышение быстродействия системы обеспечивается выбором высокопроизводительных процессоров в контроллерах, например, в стандарте «компьютер на модуле» типа NanoETXexpress фирмы Контрон, ФРГ с тактовой частотой процессора 1,6 ГГц, одномоментным началом процедуры выравнивания информации в контроллерах по высокопроизводительному интерфейсу SpaceWire со скоростью до 400 Мбит/с и небольшим временем обмена информацией между контроллерами и устройствами ввода-вывода дискретной информации также по высокоскоростному интерфейсу SpaceWire, который имеет отдельные линии для приема и для передачи информации, что повышает его пропускную способность и надежность. Длительность такта в данной системе составляет 5÷20 мс, что полностью удовлетворяет требованиям к системе управления при испытаниях РКТ.
Повышение надежности системы обеспечивается сокращением времени реакции ее на аварийные ситуации на стенде и существенным упрощением структуры, состава технических средств и системного программного обеспечения, а также устойчивым к промышленным помехам интерфейса CAN в устройстве ввода-вывода аналоговой информации 7. Интерфейс CAN позволяет приблизить последнее устройство к источникам аналоговой информации, что существенно повышает помехоустойчивость приема аналоговой информации. Дополнительным достоинством предлагаемого решения является достаточная универсальность системы, что позволяет использовать ее для испытаний различных видов изделий РКТ и для управления хранилищами и заправкой баков ракет-носителей на космодроме.
Кроме того, применение принятого космическими агентствами Европы, США, Японии и России интерфейса SpaceWire в качестве стандарта при создании перспективных космических аппаратов и ракет-носителей облегчит сопряжение предлагаемой системы со штатной летной аппаратурой систем управления этих изделий при испытаниях на стенде.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления стендовыми испытаниями изделий ракетно-космической техники | 2018 |
|
RU2684979C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ БОЕВОГО КОРАБЛЯ С ПОВЫШЕННОЙ ЖИВУЧЕСТЬЮ | 2011 |
|
RU2510961C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ОБРАБОТКИ СУДОВОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2010 |
|
RU2444782C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
| ИМИТАТОР ПИТАЮЩЕЙ ЭЛЕКТРИЧЕСКОЙ СЕТИ (ИПЭС) | 2016 |
|
RU2624610C1 |
| МОБИЛЬНАЯ МНОГОФУНКЦИОНАЛЬНАЯ АППАРАТНАЯ СВЯЗЬ | 2015 |
|
RU2609667C2 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ ДЛЯ ТРАНСПОРТНОЙ СЕТИ ПОЛЕВОЙ СИСТЕМЫ СВЯЗИ | 2016 |
|
RU2629426C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ОПЕРАТИВНОЙ ТЕЛЕФОННОЙ СВЯЗИ | 2019 |
|
RU2706224C1 |
| УНИФИЦИРОВАННЫЙ ПУЛЬТОВОЙ ПРИБОР | 2004 |
|
RU2276401C2 |
Изобретение относится к области автоматизации технологических процессов при наземных испытаниях жидкостных ракетных двигателей, двигательных установок космических аппаратов и блоков ракет-носителей и может быть использовано в химической и нефтегазовой промышленности. Техническим результатом является повышение быстродействия и надежности системы. Система содержит N локальных устройств управления, резервированную сеть связи, блок синхронизации времени, первую и вторую сети оперативного управления, первый и второй входы-выходы М автоматизированных рабочих мест (АРМ) операторов, сетевые коммутаторы и волоконно-оптические кабели. Каждое локальное устройство управления содержит три взаимосвязанных контроллера, устройства ввода-вывода дискретной и аналоговой информации, три адаптера SpaceWire и три адаптера CAN. 1 ил.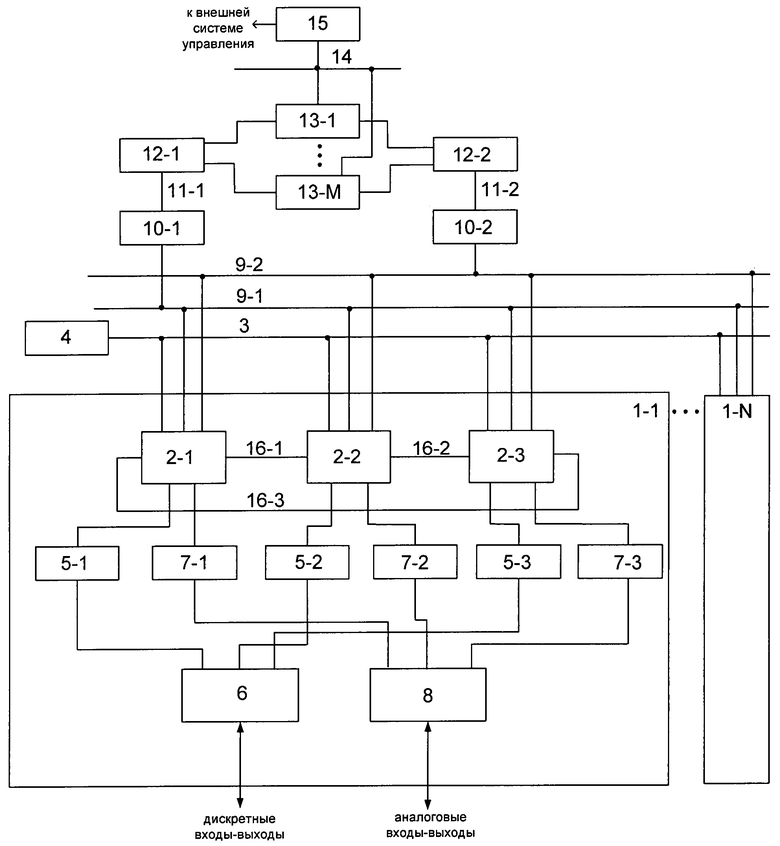
Автоматизированная резервированная система управления стендом для испытаний ракетно-космической техники, содержащая локальные устройства управления, в состав которых входят три контроллера и устройства ввода-вывода дискретной и аналоговой информации, резервированную сеть связи, соединяющую первые входы-выходы контроллеров локальных устройств управления, автоматизированные рабочие места операторов, соединенные через сеть верхнего уровня с комплектом автоматизированных рабочих мест инженеров, связанных с внешней автоматизированной координирующей системой управления, два волоконно-оптических кабеля и четыре сетевых коммутатора, отличающаяся тем, что в нее введены блок синхронизации, подключенный к резервированной сети связи, и две дублирующие друг друга сети оперативного управления, первая из которых соединяет четвертые входы-выходы контроллеров через последовательно соединенные первый сетевой коммутатор, первый волоконно-оптический кабель и третий сетевой коммутатор с первыми входами-выходами автоматизированных рабочих мест операторов, а вторая соединяет пятые входы-выходы контроллеров через последовательно соединенные второй сетевой коммутатор, второй волоконно-оптический кабель и четвертый сетевой коммутатор со вторыми входами-выходами автоматизированных рабочих мест операторов, в состав локальных устройств управления включены первый, второй и третий адаптеры SpaceWire, которые соединяют второй вход-выход соответственно первого, второго и третьего контроллеров с первым, вторым и третьим входами-выходами устройства ввода-вывода дискретной информации, а также первый, второй и третий адаптеры CAN, которые соединяют третий вход-выход соответственно первого, второго и третьего контроллеров с первым, вторым и третьим входами-выходами устройства ввода-вывода аналоговой информации, седьмой вход-выход первого контроллера локального устройства управления соединен первым интерфейсом SpaceWire с шестым входом-выходом второго контроллера, седьмой вход-выход которого соединен вторым интерфейсом SpaceWire с шестым входом-выходом третьего контроллера, седьмой вход-выход которого соединен третьим интерфейсом SpaceWire с шестым входом-выходом первого контроллера.
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
| СПОСОБ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И КОНТРОЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2340883C1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 3680069 А, 25.07.1972. | |||

