Изобретение относится к устройствам для автоматизированной обработки судовой навигационной информации и предназначено для решения задач обеспечения навигационной безопасности судовождения.
В настоящее время реализация задач эффективного управления судном требует высокую степень объединения средств автоматизации, концентрации оператора на особо ответственных решениях, создания ему для этого необходимых условий, в том числе для обеспечения повышения навигационной безопасности плавания.
По патенту (RU 2203200, МПК B64C 30/00, опубл. 27.04.2003) известен интегрированный комплекс бортового оборудования самолета. Комплекс базируется на звездообразной модели построения вычислительных сетей, согласно которой управление вычислительным процессом выполняется одним конечным устройством - резервируемой бортовой центральной вычислительной системой. Данный факт негативно сказывается на производительности комплекса при обработке больших потоков информации и усложняет расширение функциональных возможностей.
В патенте (RU 2186421, МПК G06F 19/00, G06F 171:00, G06F 15/00, G06F 15/16, опубл. 27.072002) рассмотрена корабельная боевая информационно-управляющая система. В этой системе навигационные датчики подключаются непосредственно к одной из трех ЭВМ, которые производят обработку получаемых данных. К недостаткам данной информационно-управляющей системы относится сложность управления их вычислительным процессом, недостаточная надежность распределения навигационной информации, неудобство подключения новых датчиков и масштабирования системы.
Устройство для обработки навигационных данных, описанное в статье К.В.Смелкова и П.Г.Федорова "Принципы построения информационной шины данных интегрированных мостиковых систем" (опубликована в журнале «Морской вестник» №1 (21), 2007 г.), является по технической сущности наиболее близким к предлагаемому устройству и принято в качестве прототипа. Предусматривается два автоматизированных рабочих места (АРМ), обмен информацией внутри системы осуществляется по локальной вычислительной сети Ethernet. Сопряжение с установленным на корабле навигационным вооружением и другими системами осуществляется по цифровым и аналоговым каналам связи. Кроме того, устройство обеспечивает прием и отображение первичной радиолокационной информации от навигационных РЛС корабля. Недостатками данного устройства являются: недостаточный набор сопрягаемых систем, большие задержки на преобразование данных и отсутствие управления параметрами передачи данных по локальной сети.
Задачей изобретения является создание устройства для автоматизированной обработки судовой навигационной информации с повышенным уровнем живучести за счет программно-аппаратной унификации АРМ и интеграции навигационного оборудования в единый аппаратно-программный комплекс.
Технический результат, достигаемый при использовании настоящего изобретения, заключается в расширение функциональных возможностей устройства для автоматизированной обработки судовой навигационной информации и повышении его надежности.
Поставленная задача с достижением упомянутого выше технического результата решается тем, что в устройство для автоматизированной обработки судовой навигационной информации, содержащее автоматизированные рабочие места (АРМ), основной и резервный интеграторы корабельных данных (ИКД), радиолокационные станции (РЛС), подсистему управления техническими средствами (УТС), общую шину данных, к которой подключены АРМ, интеграторы корабельных данных и подсистема УТС, причем к входам интеграторов корабельных данных подключены датчики сопрягаемых систем: навигационный комплекс, лаг, компас, эхолот, GPS, GLONASS, LORAN-C, гидро-метео комплекс, система единого времени, средства автоматической радиолокационной прокладки (САРП), гидроакустическая станция (ГАС), оптико-электронные визиры и телекамеры, дополнительно введены сетевые радар-процессоры и расширитель видеосигнала, при этом АРМ выполнены унифицированными, аналоговые выходы видеосистем подключены через расширитель видеосигнала к видеовходам АРМ, РЛС подключены к общей шине через сетевые радар-процессоры, датчики технических средств - через подсистему УТС, а к интеграторам корабельных данных подключены дополнительные датчики сопрягаемых систем: устройства измерения крена и дифферента, регистратор рейса и автоматическая идентификационная система (АИС).
Технический результат достигается также тем, что:
унифицированный АРМ содержит сервер постобработки навигационных данных, коммуникационный сервер, сервер обработки распределенной навигационной информации, интегрированную навигационную систему, судовые электронные журналы, базу данных навигационной информации, панель виртуальных навигационных приборов и подсистему контроля состояния технических средств АРМ, при этом первый выход сервера постобработки навигационных данных соединен с первым входом коммуникационного сервера, второй выход сервера постобработки навигационных данных соединен с входом сервера обработки распределенной навигационной информации, первый выход коммуникационного сервера соединен с входом панели виртуальных навигационных приборов, второй выход - со вторым входом судовых электронных журналов, третий выход - со вторым входом базы данных навигационной информации, вход/выход - с подсистемой контроля состояния технических средств АРМ, первый выход сервера обработки распределенной навигационной информации соединен с первым входом базы данных навигационной информации, второй выход - со вторым входом коммуникационного сервера, вход/выход сервера обработки распределенной навигационной информации соединен с первым входом/выходом интегрированной навигационной системы, первый выход которой соединен с первым входом судовых электронных журналов, второй выход - со вторым входом панели виртуальных навигационных приборов, вход/выход коммуникационного сервера, второй вход/выход интегрированной навигационной системы и вход/выход сервера постобработки навигационных данных являются входом/выходом АРМ;
общая шина данных представляет собой двукратно резервированную локальную вычислительную сеть, подключение к которой осуществляется с помощью управляемых сетевых коммутаторов;
подсистема УТС содержит основной и резервный блоки ввода/вывода дискретных и аналоговых сигналов (ДАС) подсистемы УТС, основной и резервный интеграторы данных (ИД) подсистемы УТС и набор выносных индикаторов аварийно-предупредительной системы (АПС), при этом каждый блок ввода-вывода ДАС подсистемы УТС соединен по основному интерфейсу RS-485 с основным ИД подсистемы УТС, по резервному интерфейсу RS-485 с резервным ИД подсистемы УТС и по интерфейсу RS-485 с шиной, соединяющей все выносные индикаторы АПС, входы/выходы ДАС подсистемы УТС являются входами/выходами подсистемы УТС, выход основного ИД подсистемы УТС является основным выходом подсистемы УТС, а выход резервного ИД подсистемы УТС является резервным выходом подсистемы УТС;
в качестве датчиков технических средств используют датчики осушительной системы, системы сжатого воздуха, топливной системы и системы сепарации воздуха, системы очистки трюмных вод, противопожарной системы, системы пресной воды, системы управления клинкетными дверями, охранной сигнализации и сигнализации затопления отсеков, системы сточных и хозяйственно-бытовых вод, системы индикации уровня цистерн, системы вентиляции, системы энергоснабжения;
интегратор корабельных данных (ИКД) содержит накопители на жестких магнитных дисках, выполненные с возможностью автоматического документирования, накопления и хранения навигационной информации;
сопряжение сетевых радар-процессоров с РЛС осуществляется по каналам «Video», «Trigger», «Heading», «Bearing».
Технический результат обеспечивается выполнением АРМ в унифицированном виде с самоорганизующейся архитектурой и автоматической управляемой реконфигурацией набора АРМ, введением дополнительных навигационных датчиков и сетевых радар-процессоров, объединенных через общую шину данных, а также расширителя видеосигнала.
Сущность изобретения поясняется чертежами, на которых представлены:
на фиг.1 - структурная электрическая схема устройства;
на фиг.2 - структурная электрическая схема унифицированного АРМ;
на фиг.3 - структурная электрическая схема подсистемы УТС.
На чертежах введены обозначения:
1 - унифицированные автоматизированные рабочие места (АРМ);
2 - расширитель видеосигнала;
3 - первый сетевой радар-процессор;
4 - второй сетевой радар-процессор
5 - основной интегратор корабельных данных (ИКД);
6 - резервный интегратор корабельных данных (ИКД);
7 - подсистема управления техническими средствами (УТС);
8 - датчики сопрягаемых систем;
9 - датчики технических средств;
10 - общая шина данных;
11 - аналоговые выходы видеосистем;
12 - первая радиолокационная станция (РЛС);
13 - вторая радиолокационная станция (РЛС);
14 - подсистема контроля состояния технических средств АРМ;
15 - панель виртуальных навигационных приборов;
16 - база данных навигационной информации;
17 - коммуникационный сервер;
18 - судовые электронные журналы;
19 - интегрированная навигационная система;
20 - сервер обработки распределенной навигационной информации;
21 - сервер постобработки навигационных данных;
22 - основной интегратор данных (ИД) подсистемы УТС;
23 - резервный интегратор данных (ИД) подсистемы УТС;
24 - основной блок ввода-вывода дискретных и аналоговых сигналов (ДАС) подсистемы УТС;
25 - резервный блок ввода-вывода дискретных и аналоговых сигналов (ДАС) подсистемы УТС;
26 - выносные индикаторы аварийно-предупредительной системы.
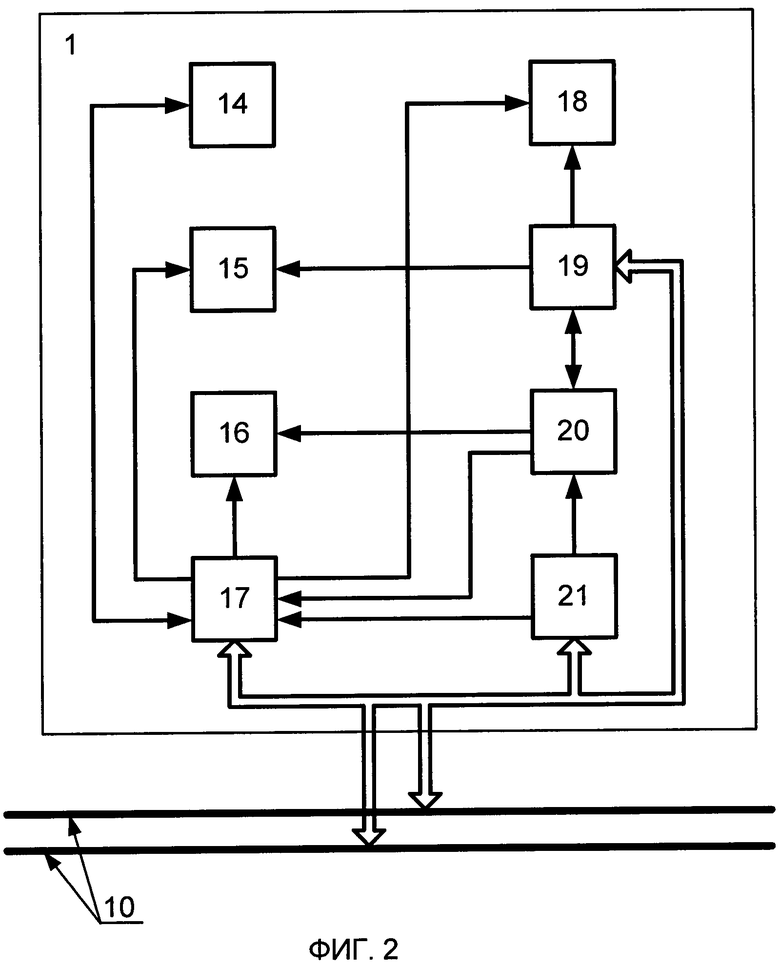
Устройство для автоматизированной обработки судовой навигационной информации (см. фиг.1) содержит унифицированные автоматизированные рабочие места (АРМ) 1, основной 5 и резервный 6 интеграторы корабельных данных (ИКД), радиолокационные станции (РЛС) 12 и 13, подсистему 7 управления техническими средствами (УТС), общую шину данных 10, к которой подключены АРМ 1, ИКД 5 и 6 и подсистема 7 УТС, сетевые радар-процессоры 3 и 4. К входам ИКД 5 и 6 подключены датчики 8 сопрягаемых систем: навигационный комплекс, лаг, компас, эхолот, GPS, GLONASS, LORAN-C, гидро-метео комплекс, система единого времени, средства автоматической радиолокационной прокладки (САРП), гидроакустическая станция (ГАС), оптико-электронные визиры, телекамеры и дополнительные датчики сопрягаемых систем: устройства измерения крена и дифферента, регистратор рейса и автоматическая идентификационная система (АИС). Аналоговые выходы 11 видеосистем подключены через расширитель видеосигнала 2 к дополнительным видеовходам АРМ 1. РЛС 12 и 13 подключены к общей шине 10 через сетевые радар-процессоры 3 и 4 соответственно, а датчики технических средств 9 - через подсистему 7 УТС.
АРМ предназначены для решения задач навигационной безопасности и выполнения задач по назначению корабля. Каждый АРМ 1 содержит (см. фиг.2) сервер постобработки навигационных данных 21, коммуникационный сервер 17, сервер обработки распределенной навигационной информации 20, интегрированную навигационную систему 19, судовые электронные журналы 18, базу данных навигационной информации 16, панель виртуальных навигационных приборов 15 и подсистему 14 контроля состояния технических средств АРМ. Первый выход сервера 21 соединен с первым входом сервера 17, второй выход сервера 21 соединен со входом сервера 20. Первый выход сервера 17 соединен с входом панели виртуальных навигационных приборов 15, второй выход сервера 17 соединен со вторым входом судовых электронных журналов 18, третий выход сервера 17 соединен со вторым входом базы данных 16 навигационной информации, вход/выход сервера 17 соединен с подсистемой 14 контроля состояния технических средств АРМ. Первый выход сервера 20 соединен с первым входом базы данных 16 навигационной информации, второй выход сервера 20 соединен с вторым входом сервера 17, вход/выход сервера 20 соединен с первым входом/выходом интегрированной навигационной системы 19. Первый выход интегрированной навигационной системы 19 соединен с первым входом судовых электронных журналов 18, второй выход - со вторым входом панели виртуальных навигационных приборов 15, вход/выход сервера 17, второй вход/выход интегрированной навигационной системы 19 и вход/выход сервера 21 являются входом/выходом АРМ. В состав АРМ входят также стандартные блоки: дисплей, манипулятор типа «мышь» или «трекбол» и клавиатура (на чертежах не обозначены), объединенные двухсторонней связью с блоками 14-21.
Общая шина данных 10 является средой передачи информации и представляет собой двукратно резервированную локальную вычислительную сеть, подключение к которой осуществляется с помощью управляемых сетевых коммутаторов (на чертежах не обозначены) (Хилл Б. Полный справочник по Cisco: Пер. с англ. М.: Вильямс, 2006. - 1088 с.).
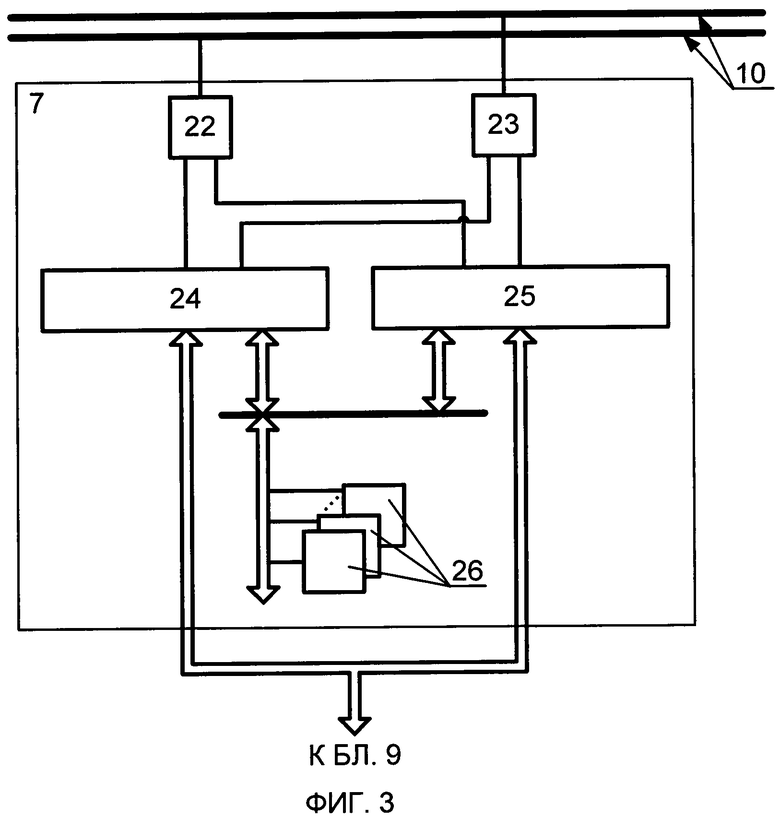
Подсистема 7 УТС предназначена для контроля и управления техническими средствами судна и содержит (см. фиг.3) основной 24 и резервный 25 блоки ввода/вывода дискретных и аналоговых сигналов (ДАС) подсистемы УТС, основной 22 и резервный 23 интеграторы данных (ИД) подсистемы УТС и набор выносных индикаторов 26 аварийно-предупредительной системы (АПС). Каждый блок 24 и 25 соединен по основному интерфейсу RS-485 с ИД 22, по резервному интерфейсу RS-485 с ИД 23 и по интерфейсу RS-485 с шиной, соединяющей все выносные индикаторы 26, входы/выходы блоков 24 и 25 являются входами/выходами подсистемы 7, выход блока 22 является основным выходом подсистемы 7, а выход блока 23 является резервным выходом подсистемы 7.
В качестве датчиков 9 технических средств подсистемы 7 УТС используют датчики осушительной системы, системы сжатого воздуха, топливной системы и системы сепарации воздуха, системы очистки трюмных вод, противопожарной системы, системы пресной воды, системы управления клинкетными дверями, охранной сигнализации и сигнализации затопления отсеков, системы сточных и хозяйственно-бытовых вод, системы индикации уровня цистерн, системы вентиляции, системы энергоснабжения.
Основной 5 и резервный 6 ИКД содержат накопители на жестких магнитных дисках, выполненные с возможностью автоматического документирования, накопления и хранения навигационной информации, поступающей от датчиков 8 сопрягаемых систем.
Сопряжение сетевых радар-процессоров 3 и 4 с РЛС 12 и 13 осуществляется по каналам «Video», «Trigger», «Heading», «Bearing».
Устройство функционирует следующим образом. Один из АРМ является ведущим. Навигационные данные поступают на обработку в основной 5 и резервный 6 интеграторы корабельных данных, где происходит их документирование, накопление и хранение. Интеграторы корабельных данных 5 и 6 передают, при необходимости конвертированные в требуемый формат, навигационные данные через резервированную общую шину данных 10 в сервер 21. Сервер 21 передает навигационные данные в базу данных 16 через сервер 17 и в случае, если АРМ является ведущим, в интегрированную навигационную систему 19 через сервер 20. Система 19 обеспечивает синхронизацию и преобразование полученных навигационных данных и передает интегральные параметры через сервер 20 в сервер 17, откуда они рассылаются подключенным системам 14, 15, 16 и 18. Интегрированные навигационные системы 19 всех АРМ через общую шину 10 организуют синхронизацию процессов, времени и обмен радиолокационной информацией с сетевыми радар-процессорами 3 и 4. Таким образом, все АРМ работают с синхронизованными по времени, интегральными навигационными данными. Коммуникационные сервера 17 всех АРМ через общую шину 10 обеспечивают синхронизацию своих внутренних баз данных.
Данные от датчиков 9 технических средств поступают на обработку в основной 24 и резервный 25 блоки ввода-вывода ДАС подсистемы УТС, откуда передаются каждому ИД 22 и 23 подсистемы УТС. Эти интеграторы производят анализ полученных данных и принимают решения о необходимости выдачи управляющих сигналов обратно на блоки 24 и 25. Также ИД 22 и 23 производят передачу сигналов состояния технических средств в общую шину данных 10 и получают от подсистемы 14 контроля состояния технических средств АРМ через коммуникационный сервер 17 указания на выдачу управляющих сигналов. Блоки 24 и 25 отображают текущее состояние технических средств на наборе выносных индикаторов 26 АПС.
РЛС 12 и 13 передают радиолокационные данные на общую шину данных 10 через сетевые радар-процессоры 3 и 4 и получают через них управляющие сигналы (переключение режимов работы РЛС) от интегрированной навигационной системы 19 АРМ.
Оператор каждого унифицированного АРМ 1, подключенного к резервированной общей шине данных 10, получает информацию о состоянии технических средств и может управлять этими системами или наблюдать за ходом автоматизированного управления. Оператор получает информацию от РЛС и может осуществлять управление ими. АРМ может получать информацию от любого набора датчиков сопрягаемых систем 8, подключенных к интеграторам корабельных данных 5 и 6. Просмотр информации от видеосистем 11, передающих аналоговый сигнал, осуществляется с помощью расширителя видеосигнала 2, подключенного к каждому унифицированному АРМ.
Благодаря синхронизации, обеспечиваемой системой 19 и сервером 17, и унификации АРМ повышается отказоустойчивость всего устройства за счет возможности реконфигурации, т.е. передачи функций (плановой или аварийной) одного АРМ на другие. Живучесть возрастает пропорционально количеству АРМ и делает информационные потоки устойчивыми, так как нарушение работоспособности любого из АРМ не приводит к потере потока исходных данных. Предложенная архитектура повышает надежность выполнения задачи, например для того, чтобы не отображалась радиолокационная информация, нужно вывести из строя все АРМ.
Разработанное устройство обладает расширенными функциональными возможностями и повышенным уровнем живучести за счет программно-аппаратной унификации АРМ, интеграции сопрягаемых систем в единый аппаратно-программный комплекс на уровне навигационного контура, контура управления техническими средствами корабля и организации самоорганизующейся архитектуры с автоматической управляемой реконфигурацией набора АРМ.
Данное устройство позволяет сократить трудозатраты личного состава, повысить надежность и эффективность выполнения ими своих функций, снизить риски технических аварий и ошибок экипажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированная судовая видеосистема | 2020 |
|
RU2760365C1 |
| ЭКСПЕРИМЕНТАЛЬНО-ОТЛАДОЧНЫЙ КОМПЛЕКС ДЛЯ СУДОВЫХ ИНТЕГРИРОВАННЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2018 |
|
RU2696964C1 |
| КОРАБЕЛЬНАЯ ИНТЕГРИРОВАННАЯ МОСТИКОВАЯ СИСТЕМА | 2010 |
|
RU2453909C1 |
| МОРСКАЯ ГЕОИНФОРМАЦИОННАЯ ИНТЕГРИРУЮЩАЯ ПЛАТФОРМА РЕАЛЬНОГО ВРЕМЕНИ | 2023 |
|
RU2808849C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| Интегрированная система навигации кораблей и судов обеспечения Военно-Морского Флота | 2020 |
|
RU2765606C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БУКСИРА ПОРТОВОГО ФЛОТА В РЕЖИМЕ ДИСТАНЦИОННОГО ПИЛОТИРОВАНИЯ | 2022 |
|
RU2794384C1 |
Изобретение относится к устройствам автоматизированной обработки судовой навигационной информации. Технический результат заключается в расширении функциональных возможностей устройства за счет программно-аппаратной унификации автоматических рабочих мест (АРМ), интеграции сопрягаемых систем в единый аппаратно-программный комплекс на уровне навигационного контура, контура управления техническими средствами корабля и организации самоорганизующейся архитектуры с автоматической управляемой реконфигурацией набора АРМ, для обеспечения навигационной безопасности судовождения. Устройство содержит АРМ, основной и резервный интеграторы корабельных данных, радиолокационные станции (РЛС), подсистему управления техническими средствами (УТС), общую шину данных, датчики сопрягаемых систем. В устройство дополнительно введены сетевые радар-процессоры, расширитель видеосигнала, автоматизированные рабочие места (АРМ) выполнены унифицированными, аналоговые выходы видеосистем подключены через расширитель видеосигнала к видеовходам АРМ, РЛС подключены к общей шине через сетевые радар-процессоры, датчики технических средств - через УТС, к интеграторам корабельных данных подключены дополнительные датчики сопрягаемых систем: устройство измерения крена и дифферента, регистратор рейса, автоматическая идентификационная система. 6 з.п. ф-лы, 3 ил.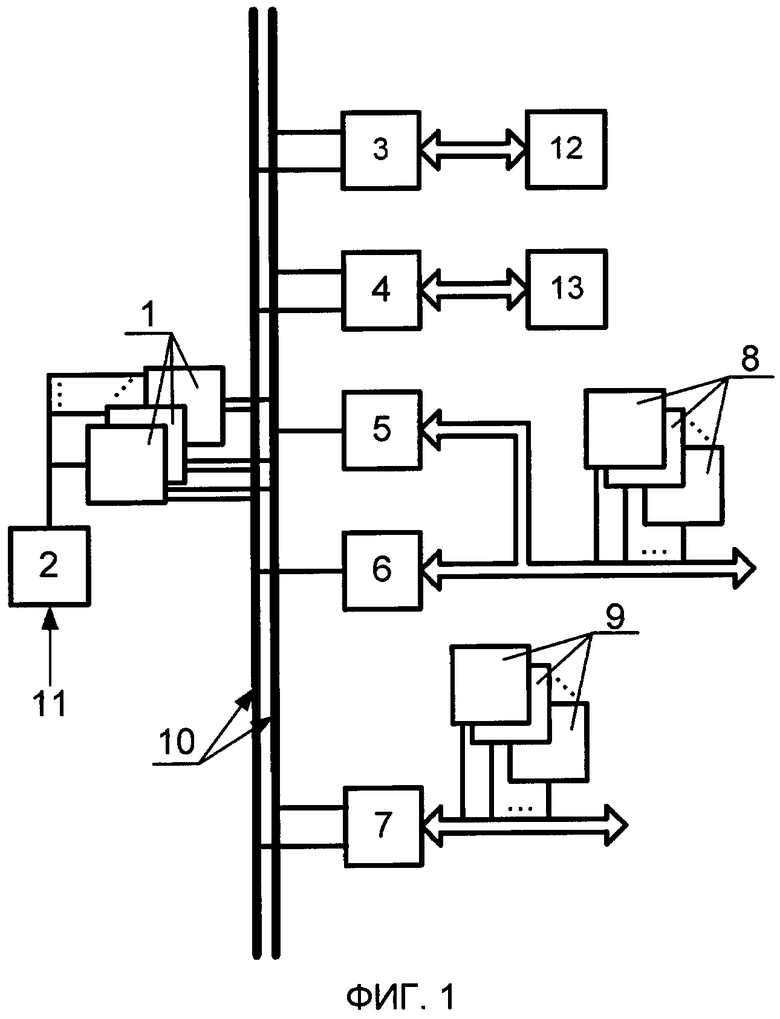
1. Устройство для автоматизированной обработки судовой навигационной информации, содержащее автоматизированные рабочие места (АРМ), основной и резервный интеграторы корабельных данных (ИКД), радиолокационные станции (РЛС), подсистему управления техническими средствами (УТС), общую шину данных, к которой подключены АРМ, интеграторы корабельных данных и подсистема УТС, причем к входам интеграторов корабельных данных подключены датчики сопрягаемых систем: навигационный комплекс, лаг, компас, эхолот, GPS, GLONASS, LORAN-C, гидрометеокомплекс, система единого времени, средства автоматической радиолокационной прокладки (САРП), гидроакустическая станция (ГАС), оптико-электронные визиры и телекамеры, отличающееся тем, что дополнительно введены сетевые радар-процессоры и расширитель видеосигнала, при этом АРМ выполнены унифицированными, аналоговые выходы видеосистем подключены через расширитель видеосигнала к видеовходам АРМ, РЛС подключены к общей шине через сетевые радар-процессоры, датчики технических средств - через подсистему УТС, а к интеграторам корабельных данных подключены дополнительные датчики сопрягаемых систем: устройства измерения крена и дифферента, регистратор рейса и автоматическая идентификационная система (АИС).
2. Устройство по п.1, отличающееся тем, что унифицированный АРМ содержит сервер постобработки навигационных данных, коммуникационный сервер, сервер обработки распределенной навигационной информации, интегрированную навигационную систему, судовые электронные журналы, базу данных навигационной информации, панель виртуальных навигационных приборов и подсистему контроля состояния технических средств АРМ, при этом первый выход сервера постобработки навигационных данных соединен с первым входом коммуникационного сервера, второй выход сервера постобработки навигационных данных соединен с входом сервера обработки распределенной навигационной информации, первый выход коммуникационного сервера соединен с входом панели виртуальных навигационных приборов, второй выход - с вторым входом судовых электронных журналов, третий выход - с вторым входом базы данных навигационной информации, вход/выход - с подсистемой контроля состояния технических средств АРМ, первый выход сервера обработки распределенной навигационной информации соединен с первым входом базы данных навигационной информации, второй выход - с вторым входом коммуникационного сервера, вход/выход сервера обработки распределенной навигационной информации соединен с первым входом/выходом интегрированной навигационной системы, первый выход которой соединен с первым входом судовых электронных журналов, второй выход - с вторым входом панели виртуальных навигационных приборов, вход/выход коммуникационного сервера, второй вход/выход интегрированной навигационной системы и вход/выход сервера постобработки навигационных данных являются входом/выходом АРМ.
3. Устройство по п.1, отличающееся тем, что общая шина данных представляет собой двукратно резервированную локальную вычислительную сеть, подключение к которой осуществляется с помощью управляемых сетевых коммутаторов.
4. Устройство по п.1, отличающееся тем, что подсистема УТС содержит основной и резервный блоки ввода/вывода дискретных и аналоговых сигналов (ДАС) подсистемы УТС, основной и резервный интеграторы данных (ИД) подсистемы УТС и набор выносных индикаторов аварийно-предупредительной системы (АПС), при этом каждый блок ввода-вывода ДАС подсистемы УТС соединен по основному интерфейсу RS-485 с основным ИД подсистемы УТС, по резервному интерфейсу RS-485 с резервным ИД подсистемы УТС и по интерфейсу RS-485 с шиной, соединяющей все выносные индикаторы АПС, входы/выходы ДАС подсистемы УТС являются входами/выходами подсистемы УТС, выход основного ИД подсистемы УТС является основным выходом подсистемы УТС, а выход резервного ИД подсистемы УТС является резервным выходом подсистемы УТС.
5. Устройство по п.1, отличающееся тем, что в качестве датчиков технических средств используют датчики осушительной системы, системы сжатого воздуха, топливной системы и системы сепарации воздуха, системы очистки трюмных вод, противопожарной системы, системы пресной воды, системы управления клинкетными дверями, охранной сигнализации и сигнализации затопления отсеков, системы сточных и хозяйственно-бытовых вод, системы индикации уровня цистерн, системы вентиляции, системы энергоснабжения.
6. Устройство по п.1, отличающееся тем, что интегратор корабельных данных (ИКД) содержит накопители на жестких магнитных дисках, выполненные с возможностью автоматического документирования, накопления и хранения навигационной информации.
7. Устройство по п.1, отличающееся тем, что сопряжение сетевых радар-процессоров с РЛС осуществляется по каналам «Video», «Trigger», «Heading», «Bearing».
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2001 |
|
RU2207585C2 |
| JP 2008286637 A, 27.11.2008 | |||
| KR 100568621 B1, 07.04.2006. | |||

