Изобретение относится к области автотранспортного машиностроения и касается конструкции ступенчатой планетарной коробки передач, которая может быть использована в автоматических трансмиссиях, управляемых с помощью электронного блока и гидравлики и предназначенных для транспортных средств.
Известна гибридная трансмиссия транспортного средства, содержащая два планетарный ряда, элементы которого связаны с приводным двигателем, двумя универсальными электрическими машинами и с выходным звеном связи с потребителем крутящего момента, а также управляемые муфты фрикционного типа для связи части звеньев этих планетарных рядов с корпусом и между собой (CN №101631688, B60K 6/365, опубл. 20.01.2010, фиг.5).
Недостаток данной гибридной трансмиссии заключается в недостаточной кинематической возможности получения разгонных передач с использованием различного вида источников энергии.
Настоящее изобретение направлено на решение технической задачи по улучшению динамических характеристик транспортного средства, используя для этого минимально возможное количество элементов управления. Достигаемый при этом технический результат заключается в расширении кинематических возможностей гибридной трансмиссии, увеличении ее долговечности, уменьшении числа деталей, что также позволяет существенно расширить число типов транспортных средств, в которые можно установить передачу с такой кинематической схемой.
Указанный технический результат достигается тем, что в гибридной трансмиссии транспортного средства, содержащей два планетарный ряда, элементы которого связаны с приводным двигателем, двумя универсальными электрическими машинами и с выходным звеном связи с потребителем крутящего момента, а также управляемые муфты фрикционного типа для связи части звеньев этих планетарных рядов с корпусом и между собой, первая универсальная электрическая машина непосредственно связана с коронной шестерней первого планетарного ряда и через первую управляемую муфту с входным валом, связанным с приводным двигателем и с водилом этого же планетарного ряда, а через вторую управляемую муфту с водилом второго планетарного ряда, имеющего связь в выходным звеном, коронная шестерня второго планетарного ряда через третью управляемую муфту связана с корпусом, а вторая универсальная электрическая машина непосредственно связана с солнечными шестернями обоих планетарных рядов и через четвертую управляемую муфту с корпусом.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретными примерами исполнения, которые, однако, не являются единственно возможными, но наглядно демонстрируют возможность достижения требуемого технического результата.
На фиг.1 - кинематическая схема гибридной трансмиссии транспортного средства;
фиг.2 - план угловых скоростей гибридной трансмиссии;
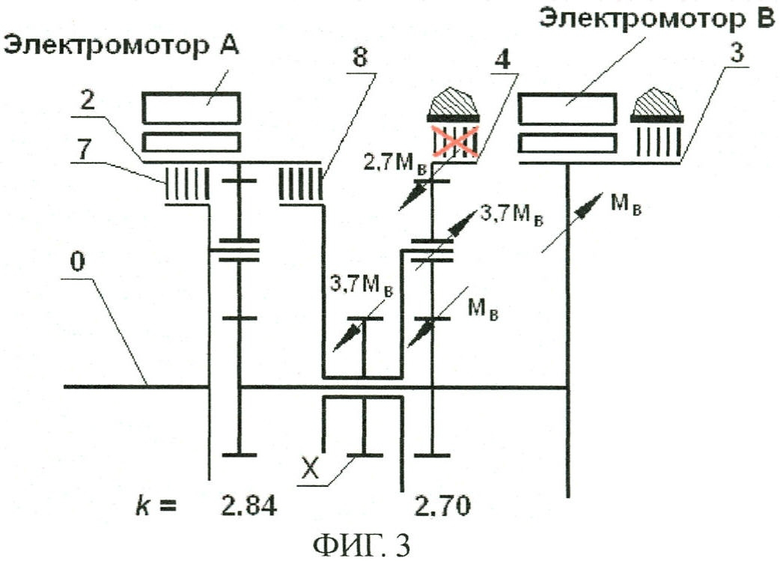
фиг.3 - режим разгона транспортного средства за счет энергии аккумуляторных батарей при включенном тормозе звена 4;
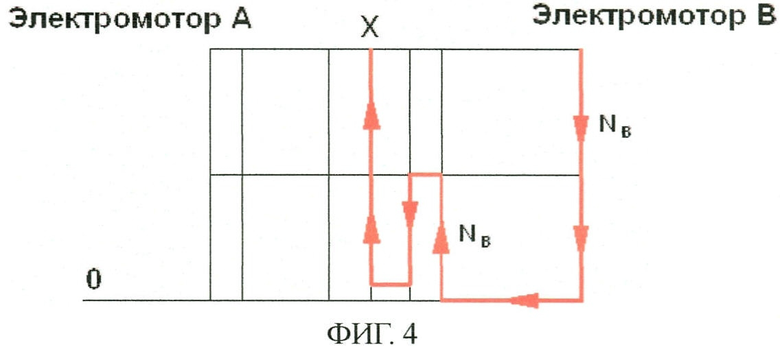
фиг.4 - диаграмма нагруженности элементов планетарного механизма и распределение потоков мощности в режиме разгона по фиг.3;
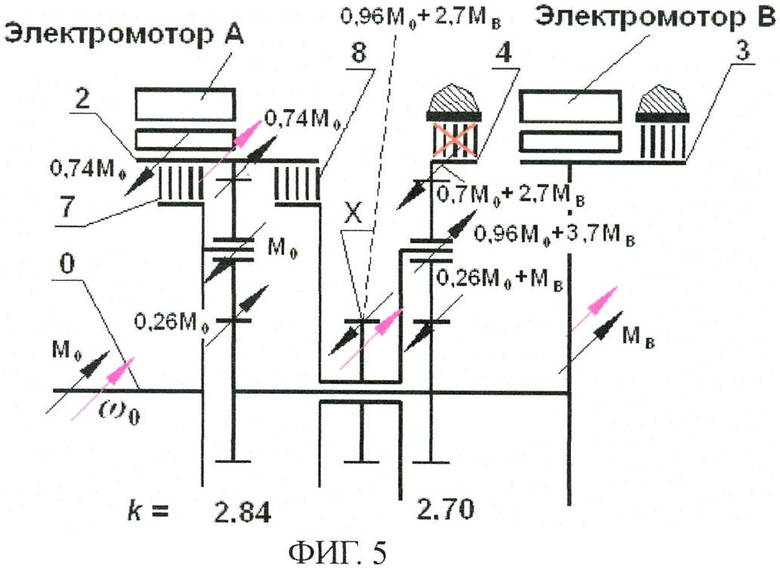
фиг.5 - режим включения ДВС и разделения мощности ДВС на входе в планетарный механизм;
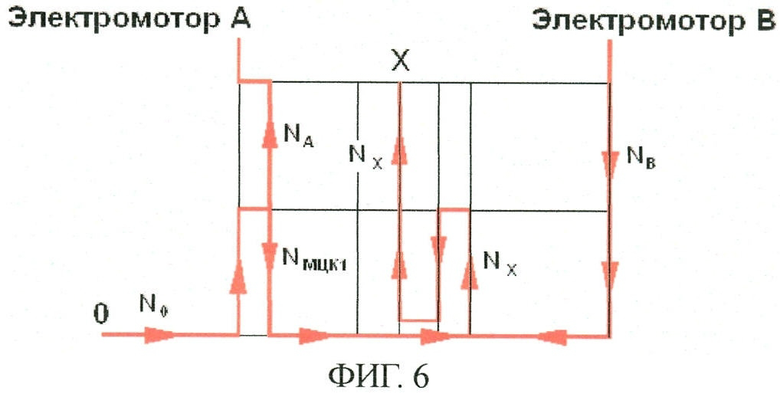
фиг.6 - диаграмма нагруженности звеньев планетарного механизма и распределение потоков мощности в нем по фиг.5;
фиг.7 - режим дальнейшего разгона транспортного средства осуществляется за счет увеличения частоты вращения электромотора A;
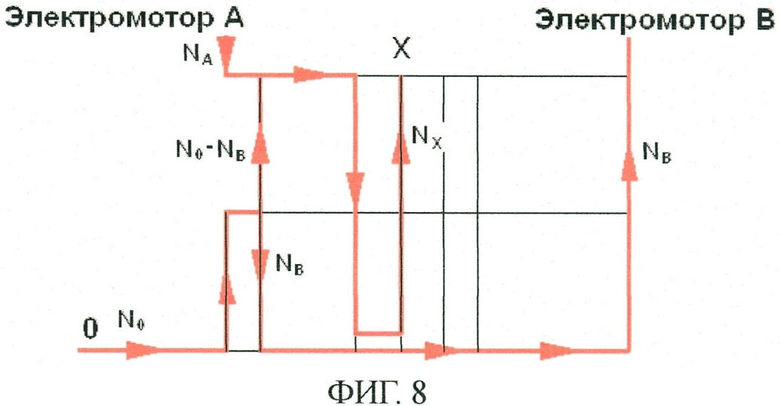
фиг.8 - диаграмма нагруженности звеньев планетарного механизма в режиме по фиг.7.
Согласно настоящему изобретению рассматривается новая гибридная трансмиссия транспортного средства, которая содержит два планетарных ряда, элементы которого связаны с приводным двигателем, двумя универсальными электрическими машинами и с выходным звеном связи с потребителем крутящего момента, а также управляемые муфты фрикционного типа (блокировочные муфты, тормоза) для связи части звеньев этих планетарных рядов с корпусом и между собой. В этой трансмиссии универсальная электрическая машина непосредственно связана с коронной шестерней первого планетарного ряда и через первую управляемую муфту с входным валом, связанным с приводным двигателем и с водилом этого же планетарного ряда, а через вторую управляемую муфту с водилом второго планетарного ряда, имеющего связь с выходным звеном, коронная шестерня второго планетарного ряда через третью управляемую муфту связана с корпусом, а вторая универсальная электрическая машина непосредственно связана с солнечными шестернями обоих планетарных рядов и через четвертую управляемую муфту с корпусом.
Индексом «0» обозначено звено, имеющее связь с двигателем внутреннего сгорания (ДВС). Индексом «Х» обозначено звено, соединенное с ведущими колесами транспортного средства. На фиг.1 следующими позициями обозначены основные элементы гибридной трансмиссии:
1 - входное звено передачи - звено-водило первого планетарного ряда;
2 - звено - коронная шестерня первого планетарного ряда;
3 - звено - солнечная шестерня первого планетарного ряда;
4 - звено - коронная шестерня второго планетарного ряда;
5 - водило второго планетарного ряда;
6 - блокировочная муфта связи солнечной шестерни первого планетарного ряда с корпусом;
7 - блокировочная муфта связи входного звена 1 со звеном 2 - коронной шестерней первого планетарного ряда;
8 - блокировочная муфта связи водила 5 с звеном 2 - коронной шестерней первого планетарного ряда.
Электромоторы A и B (позиции соответственно 9 и 10) соединены друг с другом электрической связью.
Возможны три варианта движения автомобиля.
1. Только за счет энергии аккумуляторных батарей.
2. Только за счет мощности ДВС.
3. С использованием мощности ДВС и энергии аккумуляторных батарей.
В первом случае при включенном тормозе звена 4 энергия аккумуляторных батарей подводится к электромотору «B» и далее через планетарный ряд поступает на ведомое звено «X». ДВС в этом случае не работает.
Во втором случае разгон автомобиля осуществляется в два этапа. На первом этапе включен тормоз звена 4. Мощность ДВС в первом планетарном механизме разделяется на два потока: часть идет в электромотор «A» и далее через инвентор поступает в электромотор «B»; остальная часть мощности ДВС поступает в планетарный механизм, где суммируется с первым потоком и идет на ведомое звено «X». При некоторой скорости движения автомобиля тормоз звена 4 выключается и включается блокировочная муфта 8. Регулировка скорости движения автомобиля осуществляется за счет соответствующего изменения частоты вращения электромоторов.
В третьем случае движение транспортного средства осуществляется аналогично второму случаю, только к электромоторам может подводиться помимо мощности ДВС еще и энергия аккумуляторных батарей.
Кроме того, возможно движение без использования электромоторов на чистой механике. Для этого с помощью четырех элементов управления (два тормоза и две блокировочные муфты) можно получить четыре передачи переднего хода.
Анализ кинематической схемы и плана угловых скоростей планетарного механизма гибридной трансмиссии по прототипу показал, что возможна коррекция связей некоторых звеньев из состава планетарного механизма, подключив при этом электромотор A к звену 2. На плане угловых скоростей это отражается отсутствием на нем нулевой прямой.
Таким образом, количество звеньев в планетарном механизме будет равно 5 (ведущее звено 0, ведомое звено X и звенья 2, 3 и 4). Тогда в соответствии с формулой Чебышева в состав вновь образованного планетарного механизма, обладающего тремя степенями свободы, должно входить два планетарных ряда Кпм=nзв-w=5-3=2,
где nзв - количество звеньев в составе планетарного механизма;
w - число степеней свободы планетарного механизма.
Из вновь полученного плана угловых скоростей видно, что из ведущего звена (0) и звеньев 2 и 3 можно составить планетарный механизм. Звенья 3, 4 и ведомое звено X также позволяют организовать еще один планетарный ряд. Кроме того, между ведущим звеном 0 и звеном 2 можно установить блокировочную муфту с условным звеном 7, а также можно установить блокировочную муфту с условным звеном 8 между ведомым звеном X и звеном 2.
В случае использования планетарных рядов только второго класса их структура будет следующей: 302 и 3X4 с внутренними передаточными отношениями i32=-2,84 и i34=-2,70. Кинематическая схема, составленная из этих механизмов, представлена на фиг.1.
Таким образом, за счет удаления из состава планетарного механизма звена 5 удалось синтезировать механизм, состоящий только из двух планетарных рядов, сохранив при этом все кинематические свойства планетарного механизма, состоящего из трех планетарных рядов.
Принцип работы гибридной трансмиссии с планетарным механизмом, построенным по предложенной кинематической схеме с двумя планетарными рядами, будет точно таким же, как и для механизма с тремя рядами.
Разгон с использованием энергии мощности аккумуляторов осуществляется при включенном тормозе звена 4 и увеличении частоты вращения электромотора В от нулевого значения (на плане угловых скоростей точка A). При этом электромотор A должен находиться в нейтральном состоянии. При определенной скорости движения заводится ДВС и электромотор A переводится в активный режим работы.
В случае разгона только с помощью ДВС должен быть включен тормоз звена 4. Частота электромотора В изменяется от нулевого значения (на плане угловых скоростей точка A) до максимального (точка B). Частота вращения электромотора A уменьшается от максимального значения (точка А) до минимального (точка B).
При достижении частоты вращения электромотора В точки В происходит переход с режима разделения мощности ДВС на входе в трансмиссию на режим со сложным разделением мощности ДВС. Для этого выключается тормоз звена 4 и включается блокировочная муфта 8. Далее частота вращения электромотора B должна начать уменьшаться, а частота вращения электромотора A вновь увеличиваться.
Наличие тормоза звена 3 и блокировочной муфты совместно с тормозом звена 4 и блокировочной муфтой 8 позволяет организовать четыре режима движения с фиксированным передаточным отношением, которые отражены на плане угловых скоростей (фиг.2) рабочими точками D, B, e, C.
В состав предлагаемой кинематической схемы гибридной трансмиссии по фиг.1 входят два планетарных ряда. Запишем для каждого планетарного ряда уравнение кинематической связи составляющих его звеньев.
где i32 и i34 - внутренние передаточные отношения соответствующих планетарных рядов, определенных при остановленном водиле;
ω0 - частота вращения ведущего звена 0 (вала ДВС);
ω2, ω3, и ω4 - частоты вращения соответствующих звеньев;
ωx - частота вращения ведомого звена X.
Для разгона транспортного средства с гибридной трансмиссией используются три режима бесступенчатого регулирования передаточного отношения (фиг.3). На начальном этапе используется энергия только аккумуляторных батарей, а на остальных двух разгон осуществляется с использованием мощности ДВС.
При разгоне транспортного средства только за счет энергии аккумуляторных батарей энергия от них поступает в мотор B. При включенном тормозе звена 4 мощность через второй планетарный ряд поступает на ведомое звено X, угловая скорость которого при условии ω4=0 и ω0=0 может быть определена из уравнения
где угловая скорость третьего звена ω3 определяется частотой вращения электромотора B. Электромотор A при этом должен свободно вращаться с угловой скоростью
Нагруженноеть в этом случае элементов планетарного механизма и распределение потоков мощности представлены на фиг.4.
При определенной скорости движения транспортного средства происходит запуск ДВС и трансмиссия переходит на первый режим работы с разделением мощности ДВС на входе в планетарный механизм (EVT1). После запуска ДВС выводится на некоторый установившийся режим, при этом обороты электромотора A должны, на основании (1), измениться до величины

При этом частота вращения электромотора В должна изменяться по следующему закону, который определяется из уравнения (1)

Из полученной зависимости следует, что в начале работы на первом режиме работы с разделением мощности ДВС частота вращения звена 2 должна быть положительной. Такой же вывод можно сделать и из анализа плана угловых скоростей планетарного механизма (фиг.1).
Дальнейший разгон осуществляется за счет соответствующего изменения частот вращения электромоторов A и B. При этом электромотор A должен работать в режиме генератора, а электромотор B в режиме двигателя.
В этом случае частоту вращения ведомого вала X можно определить из уравнений (1), в зависимости от частоты вращения ведущего вала ω0 и, например, электромотора A ω2

Как следует из полученных зависимостей и анализа плана угловых скоростей, для увеличение частоты вращения ведомого вала ωx и, следовательно, скорости движения транспортного средства частота вращения электромотора A должна уменьшаться, а электромотора B - увеличиваться.
Нагруженность звеньев планетарного механизма и распределение потоков мощности в нем представлено на фиг.6.
Моменты, развиваемые электромотором A и ДВС, взаимосвязанные величины, поскольку их значения определяются из условия равновесного состояния звена 2
где MA - момент, развиваемый электромотором A;
M0 - момент, развиваемый ДВС;
k1 - конструктивный параметр первого планетарного ряда.
Момент же электромотора B определяется только мощностью, подводимой к нему от электромотора A и аккумуляторной батареи. Если аккумуляторные батареи не используются, то

где MB - момент, развиваемый электромотором В;
NA - мощность, развиваемая электромотором A;
ηэл - КПД электрической части трансмиссии.
Уменьшение частоты вращения электромотора А происходит до тех пор, пока угловые скорости звеньев 2 и X не станут равными друг другу, что на плане угловых скоростей (фиг.2) при включенном тормозе звена 4 отражается точкой B. В этот момент в планетарном механизме выключается тормоз звена 4 и включается блокировочная муфта 8, соединяющая звенья 2 и X. В результате трансмиссия переходит на второй режим бесступенчатого регулирования передаточного отношения также с разделением мощности ДВС на входе (режим EVT2).
Поскольку включение блокировочной муфты происходит при равных значениях частот вращения звеньев 2 и X, то переход с режима EVT1 на режим EVT2 осуществляется без буксования.
Дальнейший разгон транспортного средства осуществляется за счет увеличения частоты вращения электромотора A (фиг.7) и, как видно из плана угловых скоростей (фиг.2), уменьшения угловой скорости электромотора B.
Угловая скорость ведомого звена в этом случае, очевидно, будет равна угловой скорости вращения электромотора A

а частота вращения электромотора В на основании уравнения (11) будет определяться зависимостью

Переход на режим EVT2 приводит и изменению режимов работы электромоторов, т.е. электромотор A начинает работать как двигатель, а электромотор B как генератор, что соответствующим образом отражается на нагруженности и распределении потоков мощности (см. фиг.8).
В этом случае взаимосвязанными величинами являются моменты, развиваемые электромотором B и ДВС, и их значения определяются из условия равновесного состояния звена 3

Момент же электромотора A определяется только мощностью, подводимой к нему от электромотора B и аккумуляторной батареи. Если аккумуляторные батареи не используются, то

Настоящее изобретение промышленно применимо, так как для его реализации не требуется специальной новой технологии и специального оборудования, кроме тех, что используются в машиностроении в производстве редукторов, в том числе и планетарных.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНАЯ ТРАНСМИССИЯ С ПРОСТЫМ ПЛАНЕТАРНЫМ МЕХАНИЗМОМ | 2016 |
|
RU2653106C1 |
| Транспортное средство с гибридной силовой установкой | 2016 |
|
RU2629648C1 |
| Привод гибридного автомобиля | 2021 |
|
RU2764612C1 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
| МОДУЛЬНАЯ АВТОМАТИЧЕСКАЯ СТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ КОРОБКА ПЕРЕДАЧ | 2012 |
|
RU2514381C1 |
| УСТРОЙСТВО РЕКУПЕРАЦИИ ЭНЕРГИИ ТОРМОЖЕНИЯ МАШИНЫ | 2010 |
|
RU2438884C2 |
| ГИБРИДНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2538502C2 |
| СИСТЕМА ПРИВОДА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2531540C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА ПЕРЕДАЧИ ДИНАМИЧЕСКОЙ МОЩНОСТИ | 2016 |
|
RU2625813C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2694387C1 |


Изобретение относится к области автотранспортного машиностроения и касается конструкции ступенчатой планетарной коробки передач. Гибридная трансмиссия содержит два планетарных ряда. Элементы планетарных рядов связаны с приводным двигателем, двумя универсальными электрическими машинами и с выходным звеном связи с потребителем крутящего момента. Управляемые муфты фрикционного типа связывают часть звеньев планетарных рядов с корпусом и между собой. Первая универсальная электрическая машина связана с коронной шестерней первого планетарного ряда и через первую управляемую муфту с входным валом, а через вторую управляемую муфту с водилом второго планетарного ряда. Коронная шестерня второго планетарного ряда через третью управляемую муфту связана с корпусом. Вторая универсальная электрическая машина непосредственно связана с солнечными шестернями обоих планетарных рядов и через четвертую управляемую муфту с корпусом. Технический результат заключается в расширении кинематических возможностей гибридной трансмиссии. 8 ил.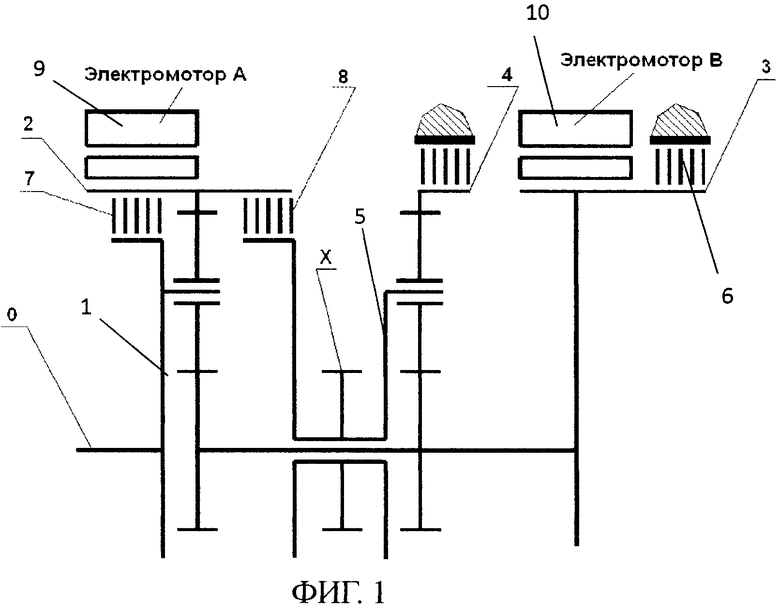
Гибридная трансмиссия транспортного средства, содержащая два планетарных ряда, элементы которых связаны с приводным двигателем, двумя универсальными электрическими машинами и с выходным звеном связи с потребителем крутящего момента, а также управляемые муфты фрикционного типа для связи части звеньев этих планетарных рядов с корпусом и между собой, отличающаяся тем, что первая универсальная электрическая машина непосредственно связана с коронной шестерней первого планетарного ряда и через первую управляемую муфту с входным валом, связанным с приводным двигателем и с водилом этого же планетарного ряда, а через вторую управляемую муфту - с водилом второго планетарного ряда, имеющего связь с выходным звеном, коронная шестерня второго планетарного ряда через третью управляемую муфту связана с корпусом, а вторая универсальная электрическая машина непосредственно связана с солнечными шестернями обоих планетарных рядов и через четвертую управляемую муфту - с корпусом.
| CN 101631688 A, 20.01.2010 | |||
| JP 2005199942 A, 28.07.2005 | |||
| ВАРИАТОР ПЛАНЕТАРНЫЙ БЕССТУПЕНЧАТЫЙ | 1995 |
|
RU2095665C1 |
| СПОСОБ КОДИРОВАНИЯ/ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЯ, МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, ИМЕЮЩИЙ СОХРАНЕННЫЕ НА НЕМ ИНСТРУКЦИИ, И СПОСОБ ПЕРЕДАЧИ ПОТОКА БИТОВ | 2019 |
|
RU2839023C1 |

