Настоящее изобретение относится к усовершенствованиям в устройствах и способах упаковки.
Согласно первому объекту настоящего изобретения предлагается устройство для манипулирования частично сформированными контейнерами, содержащее шаговое транспортирующее устройство, питатель, выполненный с возможностью подавать на транспортирующее устройство на каждом шаге множество сформированных контейнеров, станцию, содержащую множество устройств, выполненных с возможностью выполнения по существу идентичных операций на группе контейнеров, образованной этим множеством частично сформированных контейнеров, при этом шаговое транспортирующее устройство выполнено с возможностью подавать эту группу через эту станцию, и управляющее устройство, выполненное с возможностью управлять питателем так, чтобы уменьшать до целого количество частично сформированных контейнеров, подаваемых за один шаг на транспортирующее устройство.
Согласно второму объекту настоящего изобретения предлагается способ манипулирования частично сформированными контейнерами, в котором на шаговое транспортирующее устройство подают на одном шаге множество частично сформированных контейнеров, перемещают группу, образованную этими частично сформированными контейнерами через станцию, содержащую множество устройств, выполненных с возможностью выполнять по существу идентичные операции на этой группе, и управляют подачей так, чтобы уменьшить до целого количество поданных на этом шаге на транспортирующее устройство частично сформированных контейнеров.
Благодаря этим двум объектам можно создать устройство для манипулирования частично сформированными контейнерами, которое продолжит работу с уменьшенной производительностью после отказа одного из узлов устройства, не изготавливая при работе дефектных контейнеров, например незакрытых (т.е. без плохого укупоривания горловины), незаполненных или незапечатанных.
Согласно третьему объекту настоящего изобретения предлагается устройство для манипулирования частично сформированными контейнерами, содержащее транспортирующее устройство, содержащее множество принимающих участков для приема частично сформированных контейнеров, множество станций, выполненных с возможностью выполнения операций на таких частично сформированных контейнерах, при этом по меньшей мере одна станция содержит нагревательное устройство, и управляющее устройство, выполненное с возможностью управления транспортирующим устройством, при этом транспортирующее устройство выполнено с возможностью подавать частично сформированные контейнеры через эти станции и после приема команды на прекращение работы от управляющего устройства останавливать приемные участки так, чтобы они были смещены от этого нагревательного устройства.
Согласно четвертому объекту настоящего изобретения предлагается способ манипулирования частично сформированными контейнерами, при котором принимают множество частично сформированных контейнеров во множество соответствующих приемных участков транспортирующего устройства, подают транспортирующее устройство через множество станций, выполняют на этих станциях операции на множестве частично сформированных контейнеров, при этом эти операции включают нагревание по меньшей мере на одной из этих станций частично сформированных контейнеров с помощью нагревательного устройства и смещение приемных участков так, чтобы они были смещены относительно нагревательного устройства после приема транспортирующим устройством команды на остановку работы.
Благодаря этим двум объектам можно создать устройство для защиты частично сформированных контейнеров от повреждения при нагреве, когда работа устройства стопорится. Ни один частично сформированный контейнер не повреждается от нагрева, поскольку он смещен от нагревательного устройства.
Согласно пятому объекту настоящего изобретения предлагается устройство для возврата в исходное положение подвижной механической детали, содержащее серводвигатель для привода этой движущейся механической детали, управляющее устройство, управляющее этим серводвигателем, и механический упор для остановки движущейся механической детали в исходном положении, при этом управляющее устройство выполнено с возможностью следить за отбираемой от серводвигателя мощностью и опознавать это исходное положение как соответствующее положению этого серводвигателя, когда отбираемая от серводвигателя мощность достигнет заранее определенной величины.
Согласно шестому объекту настоящего изобретения предлагается способ возврата в исходное положение подвижной механической детали, при котором управляют серводвигателем, приводят в движение эту механическую деталь с помощью серводвигателя, останавливают подвижную механическую деталь в исходном положении механическим упором, отслеживают отбираемую от серводвигателя мощность и опознают исходное положение как соответствующее положению этого серводвигателя, в котором отбираемая от серводвигателя мощность достигает заранее определенной величины.
Благодаря этим двум объектам можно более точно определять исходное положение и устранить необходимость в установке и обслуживании отдельного датчика.
Согласно седьмому объекту настоящего изобретения предлагается устройство для наполнения частично сформированных контейнеров, содержащее наполняющее сопло, наполняющий насос, выполненный с возможностью приема продукта из резервуара для продукта и подачи этого продукта в наполняющее сопло, и управляющее устройство, выполненное с возможностью управлять наполняющим насосом в соответствии с выбранным одним из множества профилей электронного кулачка.
Согласно восьмому объекту настоящего изобретения предлагается способ наполнения частично сформированного контейнера, при котором получают продукт из резервуара для продукта на наполняющем насосе, подают продукт на наполняющее сопло и управляют наполняющим насосом в соответствии с одним из множества профилей электронного кулачка.
Благодаря этим двум объектам можно создать устройство, которое содержит по меньшей мере два профиля электронного кулачка, которые могут адаптировать работу наполняющего насоса. Например, профили электронного кулачка могут выбираться для легкой адаптации работы наполняющего насоса к разной вязкости продукта.
Далее следует более подробное описание примера настоящего изобретения со ссылками на прилагаемые чертежи, где:
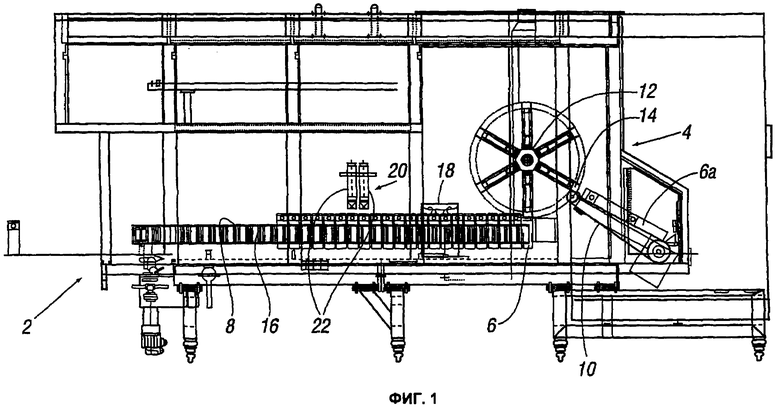
Фиг.1 - вид сбоку машины для формирования, наполнения и запечатывания контейнеров.
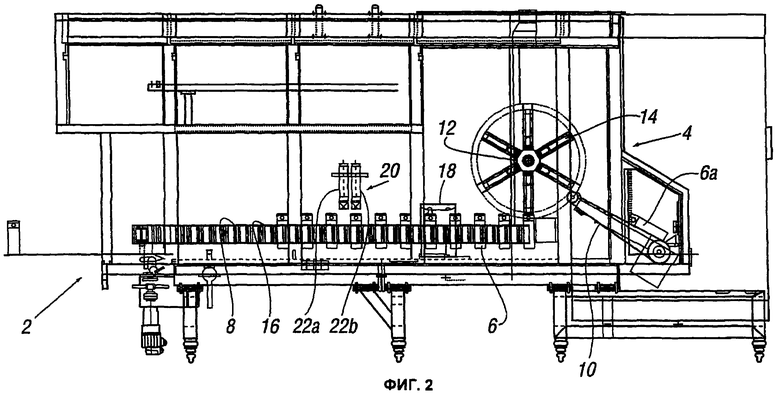
Фиг.2 - вид, аналогичный фиг.1, машины, иллюстрирующий другой режим работы.
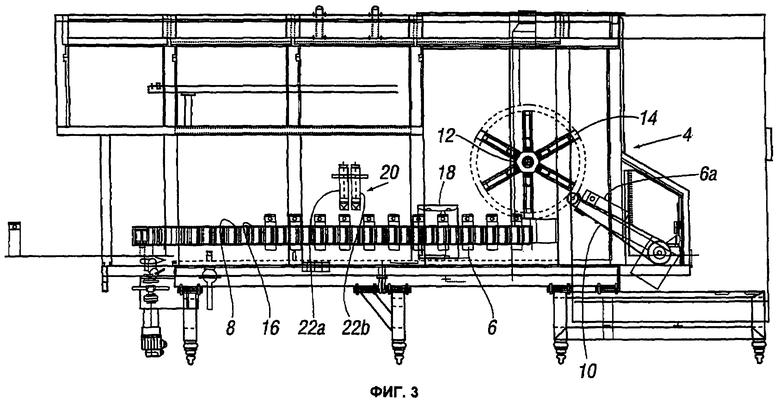
Фиг.3 - вид, аналогичный фиг.1 и 2, иллюстрирующий еще один режим работы.
Фиг.4 - изображение управляющего экрана машины согласно фиг.1-3.
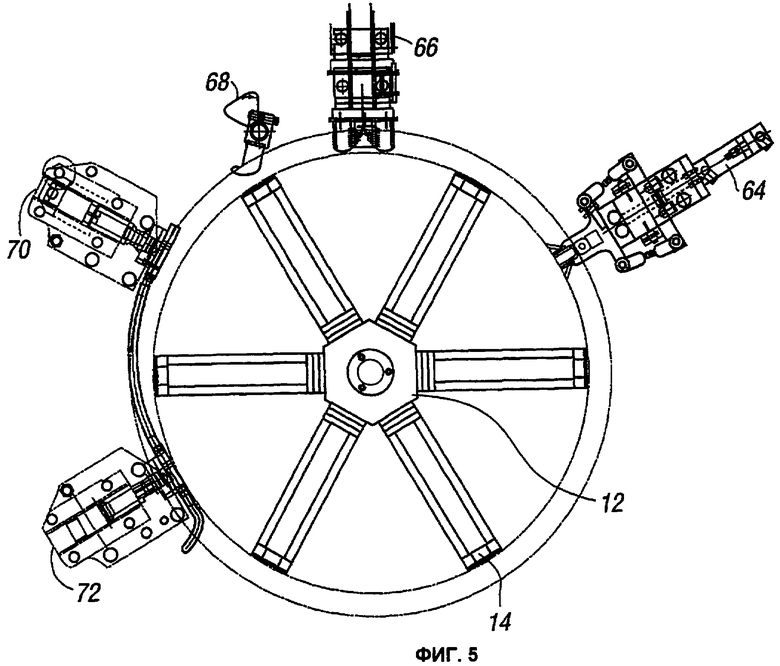
Фиг.5 - вид сбоку поворотной установки и станций фальцевания дна, закрывания и запечатывания машины согласно фиг.1, где оправки поворотной установки показаны в положении середины шага между станциями.
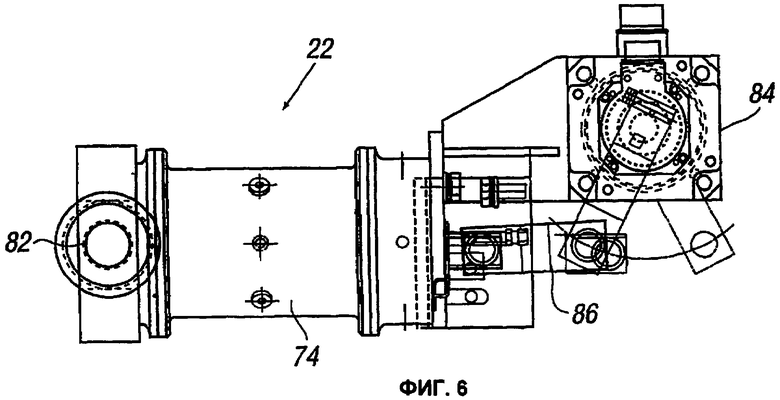
Фиг.6 - вид снизу наполняющего насоса и серводвигателя насоса согласно фиг.1.
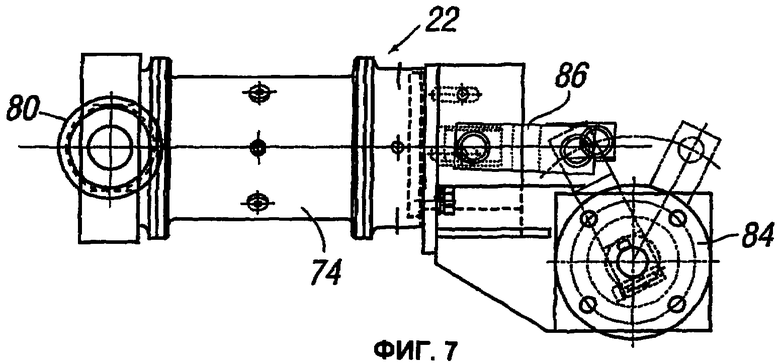
Фиг.7 - вид сверху наполняющего насоса и серводвигателя согласно фиг.6.
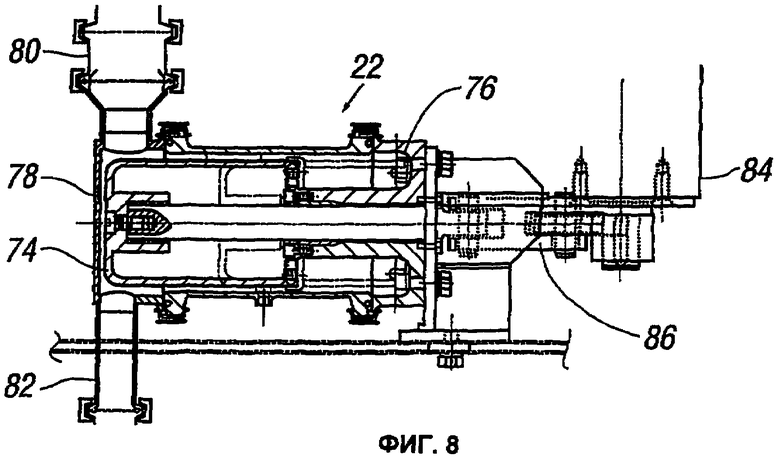
Фиг.8 - сечение наполняющего насоса и серводвигателя насоса согласно фиг.6.
На фиг.1 показана машина 2 для по меньшей мере формирования и наполнения контейнеров, содержащая подающий механизм 4 для контейнеров, который подает частично сформированные контейнеры 6 с открытым верхом на транспортирующее устройство 8. Подающий механизм 4 для контейнеров содержит загрузчик 10, подающий открытые рукава 6а контейнеров на вращающуюся поворотную установку 12, имеющую шесть радиально отходящих оправок 14. Поворотная установка 12 пошагово поворачивает полученные рукава 6а контейнеров через станции формирования дна контейнера, которые фальцуют, закрывают и запечатывают днища контейнеров, как более подробно будет описано ниже. Съемник контейнеров снимает частично сформированные контейнеры 6 с оправок 14 с помощью присосок, направляя их в область переноса, где передающий толкатель выталкивает частично сформированные контейнеры 6 в участки для приема контейнеров, выполненные в форме контейнерных гнезд 16 транспортирующего устройства 8.
Привод транспортирующего устройства машины 2, который оперативно соединен с транспортирующим устройством 8, получает команды на пошаговое перемещение частично сформированных контейнеров 6 по одному в последовательном расположении через станции, выполняющие сдвоенные операции. Соответствующие пары сервомеханизмов одновременно выполняют идентичные операции на каждом частично сформированном контейнере 6 из последовательных пар таких контейнеров, последовательно расположенных по одному, по мере того, как транспортирующее устройство 8 пошагово перемещает пару частично сформированных контейнеров 6 за один раз в каждую станцию, выполняющую сдвоенную операцию.
Транспортирующее устройство 8 является устройством, перемещающимся с двойным шагом, а поворотная установка 12 перемещается с одинарным шагом. Поворотная установка 12 работает со скоростью, вдвое превышающей скорость транспортирующего устройства 8. При каждом шаге конвейера пара последовательно расположенных частично сформированных контейнеров 6 позиционируется на каждой станции, выполняющей сдвоенную операцию. При каждом шаге конвейера транспортирующее устройство 8 перемещается на расстояние, равное ширине двух контейнерных гнезд 16. Управляющее устройство управляет подающим устройством 4 так, чтобы оно подавало 86 контейнеров в минуту, а транспортирующее устройство перемещало 43 контейнера в минуту.
Первая станция, выполняющая сдвоенные операции, через которую проходят частично сформированные контейнеры 6, является станцией 18 предварительного формирования верха, которая содержит пару механизмов предварительного формирования верха, осуществляющих идентичные операции по предварительному формированию верха на каждом из пары частично сформированных контейнеров 6 на станции 18 предварительного формирования. Вторая станция, выполняющая сдвоенные операции, через которую проходят частично сформированные контейнеры 6, является станцией 20 наполнения, которая содержит пару устройств 22 наполнения для выполнения идентичной операции наполнения на каждом из пары частично сформированных контейнеров 6 на станции 20 наполнения. Станция 20 наполнения более подробно описана ниже со ссылками на фиг.6-8. Станция 20 наполнения также содержит пару подъемников контейнеров, расположенных под транспортирующим устройством 8 и предназначенных для подъема частично сформированных контейнеров 6 на станции 20 наполнения до устройств 22 наполнения.
Машиной 2 управляет управляющее устройство. Управляющее устройство соединено с подающим механизмом 4 для контейнеров и запрограммировано для управления подающим механизмом 4 для подачи частично сформированных контейнеров 6 на транспортирующее устройство 8. Управляющее устройство также запрограммировано для управления приводом транспортирующего устройства, который оперативно соединен с транспортирующим устройством 8 для пошагового перемещения контейнеров на станции 18 и 20, выполняющие сдвоенные операции. Механизмы станций 18 и 20, выполняющих идентичные операции, включают пару сервомеханизмов или сервоосей, которые одновременно выполняют идентичные операции на частично сформированных контейнерах 6, образующих последовательные пары. Управляющее устройство запрограммировано на пошаговое перемещение транспортирующего устройства 8 только один раз на каждые два частично сформированные контейнера 6, которые подаются подающим механизмом 4 на транспортирующее устройство 8 по команде управляющего устройства.
Управляющее устройство далее запрограммировано на обнаружение отказов любого из двух сервомеханизмов из пары сервомеханизмов на каждой станции 18, 20, выполняющей сдвоенные операции, и в ответ на вывод информации об отказе в графическом формате на экран дисплея и на автоматическую остановку работы машины. Управляющее устройство также запрограммировано на перевод машины в обходной режим, в ответ на обнаружение отказа в любом из этих двух сервомеханизмов на любой из станций 18 и 20, выполняющих сдвоенные операции.
В обходном режиме управляющее устройство останавливает работу машины и по указанию оператора (или автоматически) выдает команду на подающий механизм 4 на работу без подачи частично сформированных контейнеров 6 на транспортирующее устройство 8 в положениях, на которые в обычном режиме воздействует неисправный сервомеханизм станции 18 или 20, выполняющей сдвоенные операции. Это позволяет оставшемуся сервомеханизму станции продолжить выполнять операцию на частично сформированных контейнерах 6 и позволяет машине 2 продолжить работу с половинной производительностью, не повреждая контейнеры. Другими словами, в обходном режиме используется избыточность, присущая такой конфигурации станций, выполняющих сдвоенные операции, что позволяет продолжить работу любого одного из их сдвоенных сервомеханизмов. Пары сервомеханизмов могут включать пары аппликаторов колпачков.
Управляющее устройство сконфигурировано для соединения с каждым сервомеханизмом пар сервомеханизмов, расположенных на станциях 18, 20, выполняющих сдвоенные операции, и для экономии энергии и сокращения износа деталей запрограммировано на отключение каждого сервомеханизма из пары сервомеханизмов, расположенных на станциях 18 и 20, выполняющих сдвоенные операции, который в противном случае выполнял бы операции на пустых положениях вдоль транспортирующего устройства 8.
Управляющее устройство далее сконфигурировано для соединения с загрузчиком 10 и приводом поворотной установки подающего механизма 4, где привод поворотной установки оперативно соединен с поворотной установкой 12 подающего механизма и выполнен с возможностью вращения поворотной установки вокруг ее горизонтальной оси. Управляющее устройство запрограммировано на управление загрузчиком 10 подающего механизма 4 для загрузки рукавов 6а контейнеров на шесть радиальных оправок 14 подающей поворотной установки 12 подающего механизма, установленных с возможностью приема рукавов 6а контейнеров от загрузчика 10, и, далее, запрограммировано для управления поворотной установкой 12 для пошагового поворота принятых рукавов 6а контейнеров через множество станций, формирующих днище.
Управляющее устройство далее запрограммировано так, что при обнаружении отказа в любом сервомеханизме из пар сервомеханизмов, после остановки машины и либо автоматически, либо по указанию оператора, отключать устройства формирования днища и обрабатывающие устройства так, чтобы они не работали на незанятых оправках 14. Отключенные формирующие и обрабатывающие устройства включают устройства для сгибания дна, совершающий возвратно-поступательные перемещения нагреватель дна, входящий в каждый рукав 6а контейнера и выходящий из него, когда приводится пневмоцилиндром, управляемым электромагнитным клапаном, и аппликаторы давления дна. Хотя движение нагревателя дна отключено, в обходном режиме нагреватель остается горячим.
Управляющее устройство также сконфигурировано для соединения с устройством для снятия контейнеров и запрограммировано для управления устройством для снятия контейнеров так, чтобы оно взаимодействовало с каждым частично сформированным контейнером 6 присоской устройства для снятия контейнеров и вытягивало каждый частично сформированный контейнер 6 вниз с каждой оправки 14 поворотной установки в область переноса контейнеров, когда каждая оправка 14 поворотной установки достигает станции снятия контейнеров в положении поворотной установки, соответствующем шести часам на циферблате часов. При обнаружении отказа в любом сервомеханизме из пар сервомеханизмов на одной из станций 18, 20, выполняющих спаренные операции, управляющее устройство запрограммировано так, что оно отключает работу снимающих устройств на незанятых оправках 14.
Управляющее устройство также сконфигурировано для соединения с переносящим толкателем и запрограммировано для управления переносящим толкателем для выталкивания частично сформированных контейнеров 6 с открытым верхом из области переноса в соответствующие соседние гнезда 16 транспортирующего устройства 8. При обнаружении отказа в любом сервомеханизме из пар сервомеханизмов на любой из станций 18, 20, выполняющих сдвоенные операции, управляющее устройство запрограммировано так, что оно отключает переносящий толкатель, когда в области переноса отсутствует частично сформированный контейнер 6, чтобы экономить энергию и уменьшить износ этих компонентов.
На фиг.2 показана машина 2 согласно фиг.1, работающая после обнаружения отказа в наполняющем устройстве 22а. Управляющее устройство управляет подающим механизмом 4 так, чтобы подавать открытые рукава 6а контейнеров только на оправки 14 поворотной установки 12, следующие через одну друг от друга. В результате сокращенной подачи рукавов 6а контейнеров на поворотную установку 12 количество частично сформированных контейнеров 6, подаваемых на транспортирующее устройство 8, уменьшается. Транспортирующее устройство 8 двойного шага согласно фиг.2 получает только один частично сформированный контейнер 6 на каждый шаг.
Как показано на фиг.2, когда шаговое перемещение транспортирующего устройства 8 достигает станции 20 наполнения, частично сформированный контейнер 6 расположен рядом с наполняющим устройством 22b, но рядом с неисправным наполняющим устройством 22а частично сформированного контейнера 6 нет. На фиг.3 показана машина 2 согласно фиг.1, работающая после обнаружения отказа в наполняющем устройстве 22b.
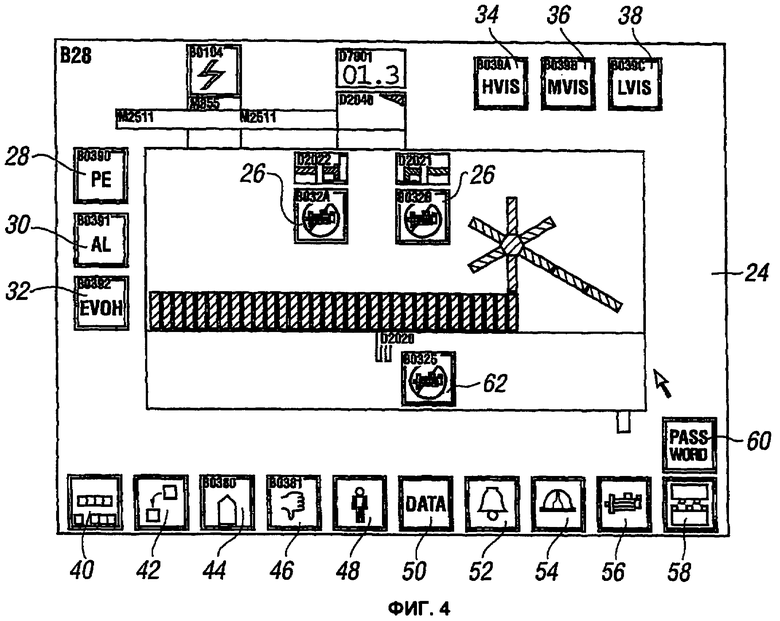
Когда обнаруживается отказ в любом из сервомеханизмов, составляющих пары сервомеханизмов станций 18, 20, выполняющих сдвоенные операции, например пары устройств для предварительного формирования верха на станции 18 предварительного формирования верха, работу машины можно остановить. Информация об отказе выводится для оператора в графическом формате на интерфейс пользователя машиной в форме экрана 24, показанного на фиг.4. Оператор принимает решение о ремонте машины или о включении обходного режима. Если оператор решает перейти в режим обхода отказа, он нажимает на экранную кнопку 26, которая заставляет управляющее устройство перевести управление машиной в обходной режим.
При этом генерируется специфический сигнал, подаваемый на управляющее устройство для управления подающим механизмом 4 так, чтобы не подавать частично сформированные контейнеры 6 на транспортирующее устройство 8 в положения, на которые в противном случае будет воздействовать сервомеханизм, в котором обнаружен отказ, что позволяет второму сервомеханизму на той же станции, выполняющей сдвоенные операции, продолжить выполнять операции на частично сформированных контейнерах 6. Машина 2 продолжает работать с половинной производительностью, не производя пустых или частично сформированных контейнеров 6. Кроме того, отключается каждый сервомеханизм из пары сервомеханизмов, расположенный на другой станции, выполняющей сдвоенные операции, который в противном случае продолжал бы выполнять операции над пустыми позициями на транспортирующем устройстве 8. Формирующие и обрабатывающие устройства, а также снимающие устройства на незанятых оправках 14 отключаются, и переносящий толкатель отключается на периоды пошаговой подачи, когда в области переноса отсутствует частично сформированный контейнер 6.
Машина 2 также может быть выполнена с возможностью в ответ на обнаружение отказа автоматически уменьшать количество частично сформированных контейнеров 6 на шаг перемещения транспортирующего устройства 8. В этом случае отказом является специфический сигнал, посылаемый на управляющее устройство для управления подающим механизмом 4, чтобы он уменьшил количество рукавов 6а контейнеров, подаваемых на оправки 14.
Экран 24 позволяет оператору управлять и другими аспектами работы машины 2. Кнопки 28, 30 и 32 позволяют оператору управлять аспектами работы машины 2 в соответствии с типом контейнеров, подаваемых подающим механизмом 4. Кнопка 28 показывает, что подаются частично сформированные контейнеры, выполненные из картона с тонким слоем полиэтилена с обеих сторон. Кнопка 30 показывает, что частично сформированные контейнеры 6 содержат барьерный слой алюминиевой фольги, а кнопка 32 показывает, что частично сформированный контейнер 6 содержит слой этилен-винилового спирта (EVOH). Кнопки 28, 30, 32 выбора типа контейнера меняют температуру нагревателей устройств запечатывания дна и верха.
Кнопки 24, 26 и 38 используются для выбора работы устройств наполнения 22 в соответствии с вязкостью продукта, разливаемого в частично сформированные контейнеры 6. Кнопка 34 задает функцию наполнения, соответствующую продукту с высокой вязкостью, например йогурту, кнопка 36 задает функцию наполнения, соответствующую продукту средней вязкости, а кнопка 38 задает функцию наполнения, соответствующую низкой вязкости. Кнопки 34, 36 и 38 нельзя использовать, когда машина находится в состоянии активного наполнения.
В нижней части экрана 24 расположены кнопки разных функций. Кнопка 40 - это кнопка главного меню, кнопка 42 - кнопка возврата, кнопка 44 - кнопка выбора производственного режима, кнопка 46 - запрос подачи продукта на машину 2, и кнопка 48 - кнопка выбора режима техобслуживания. Кнопка 50 вызывает текущие производственные данные, например количество обработанных частично сформированных контейнеров, кнопка 52 - кнопка тревоги, кнопка 54 - кнопка аварийного останова, кнопка 56 выводит на экран любые отказы серводвигателя, и кнопка 58 - кнопка управления муфтой. Кнопка 60 - кнопка ввода пароля, а кнопка 62 позволяет обходить работу серводвигателя подъемника. Серводвигатель подъемника поднимает частично сформированные контейнеры 6 перед их наполнением на станции 20 наполнения. Для некоторых размеров контейнеров и/или для некоторых продуктов подъем контейнеров отключается.
Каждое устройство наполнения 22 на станции 20 наполнения содержит наполняющее сопло, наполняющий насос, выполненный с возможностью получения продукта из резервуара для продукта, а управляющее устройство выполнено с возможностью управлять наполняющим насосом в соответствии с одним из множества профилей электронного кулачка. Управляющее устройство запрограммировано на управление парой поршневых наполняющих насосов, которые сообщаются с резервуаром для продукта на соответствующих входных сторонах насосов и с наполняющими соплами на соответствующих выходных сторонах насосов, благодаря чему насосы откачивают продукт из резервуара и раздают полученный из резервуара продукт через соответствующие наполняющие сопла.
Транспортирующее устройство 8 несет частично сформированные контейнеры 6 с открытым верхом, расположенные последовательно по одному, через станцию 20 наполнения, приостанавливаясь, когда каждая пара частично сформированных контейнеров 6, расположенных последовательно по одному, приходит на станцию 20 наполнения в положение для приема продукта из пары наполняющих сопел. Управляющее устройство также содержит три выбираемых оператором наполняющих кулачка, имеющих соответствующие профили, которые адаптируют работу наполняющего насоса к трем разным типам вязкости продукта. Следовательно, машина легко адаптируется к раздаче разных продуктов с разной вязкостью.
Наполняющие кулачки являются электронными кулачками, запрограммированными в машиночитаемом запоминающем устройстве. Наполняющие кулачки, выбранные для продуктов с повышенной вязкостью, таких как йогурт, предназначены для управления наполняющими насосами с соответственно пониженной скоростью, чтобы избежать разрушения вязкого продукта. Наполняющие кулачки, выбранные для продуктов с повышенной вязкостью, также предназначены для увеличения выдержки времени между ходом предварительного наполнения/всасывания насоса, при котором жидкость втягивается из резервуара для продукта, и ходом наполнения/выталкивания насоса, который прокачивает жидкость через сопла. Увеличение времени выдержки предотвращает капание продуктов с повышенной вязкостью.
Управляющее устройство также содержит интерфейс оператора, который позволяет оператору машины управлять устройством, переключаясь между тремя разными профилями кулачка. Интерфейс оператора содержит графический пользовательский интерфейс, выводимый на экран 24. Как описано выше, интерфейс оператора содержит три экранные кнопки, обозначенные "низкая вязкость", "средняя вязкость" и "высокая вязкость", которые можно использовать для выбора и применения управляющим устройством трех соответствующих профилей кулачка наполняющего сопла.
Подъемники контейнеров, управляемые серводвигателем, следуют профилю движения, который определен электронным кулачком так же, как и серводвигатель наполнения следует профилю движения, который определен электронным кулачком. Профиль кулачка для подъемников, которые поднимают частично сформированные контейнеры перед наполнением и во время наполнения, может выбираться пользователем также в соответствии с вязкостью продукта, раздаваемого наполняющими устройствами 22.
На фиг.5 более подробно показана поворотная установка 12 с радиально выступающими оправками 14. Управляющее устройство соединено с приводом поворотной установки и запрограммировано на управление этим приводом, оперативно соединенным с поворотной установкой и пошагово поворачивающим поворотную установку 12, установленную с возможностью вращения вокруг горизонтальной оси. Шесть радиально выступающих оправок 14 поворотной установки 12 расположены для приема открытых рукавов 6а контейнеров от подающего механизма 10 и для переноса полученных рукавов 6а через последовательность рабочих станций, включающую станцию 64 фальцевания дна, станцию 66 нагрева дна устройство 68 подгибания дна, станции 70 и 72 для запечатывания и прессования дна и станцию съема (не показана).
Станция 66 нагрева дна контейнера содержит электрический резистивный нагревательный элемент для нагрева дна контейнера, установленный на держателе, выполняющем возвратно-поступательные перемещения, при этом нагревательный элемент при работе машины постоянно нагрет до 500°С, за исключением периодов, когда подача питания на станцию 66 прекращается во время аварийных остановок. Нагревательный элемент нагревает частично фальцованные картонные торцевые клапаны дна рукавов 6а контейнера до точки, при которой склеивающееся при нагреве вещество, покрывающее картонные клапаны, размягчается для последующего закрывания и запечатывания дна. Этим чувствительным к температуре веществом может быть термореактивная пластмасса, например полиэтилен низкой плотности (LDPE), возможно, с промежуточным барьерным слоем, препятствующим прохождению кислорода, например, из алюминия или этилен-винилового спирта (EVOH).
Управляющее устройство задерживает каждую оправку 14 поворотной установки на каждой станции так, чтобы на каждой станции на частично сформированных контейнерах 6 можно было провести соответствующую операцию. Когда поворотная установка останавливает оправку 14 на станции 66 нагревания, совершающий возвратно-поступательные перемещения держатель подает нагревательный элемент в положение, близкое к осевому внешнему концу оправки 14. На каждой из двух последующих станций 70 и 72 прессования дна устройство приложения давления к дну подается радиально внутрь для прессования клапанов дна друг к другу, заставляя размягченное чувствительное к температуре вещество сформировать шов через дно контейнера и физически связать клапаны дна друг с другом в единую панель дна контейнера.
Управляющее устройство также управляет снимающим устройством, которое содержит присоску, установленную на держателе, совершающем вертикальные возвратно-поступательные перемещения. Когда держатель выдвинут вверх, присоска взаимодействует с частично сформированным контейнером 6, который поворотная установка 12 позиционирует на станции снятия, т.е. когда поворотная установка 12 находится в положении 6 часов на циферблате часов. Затем держатель втягивается, вытягивая частично сформированный контейнер 6 вниз с соответствующей оправки 14 в область переноса контейнеров. Управляющее устройство также запрограммировано для управления переносящим толкателем, который выталкивает частично сформированный контейнер 6 из области переноса на конвейер 8.
Управляющее устройство соединено с управляющим экраном и получает от него команды. Команда на остановку машины выдается на управляющее устройство при приведении в действие во время работы машины кнопки остановки или кнопки "подача" ("feed"), которая выведена на управляющий экран. В ответ на эту команду остановки управляющее устройство останавливает вращение поворотной установки, но оставляет нагревательный элемент для дна контейнера на станции 66 горячим так, чтобы этот элемент мог быстро возобновить работу. Чтобы предотвратить повреждение контейнера теплотой, которое может произойти, если его оставить на длительное время на станции нагрева дна на одном радиусе с нагревательным элементом, управляющее устройство останавливает поворотную установку на половине шага, где оправки расположены между станциями. Остановка поворотной установки 12 является автоматическим процессом, и машина 2 переходит в холостой режим в течение 10 секунд после опорожнения.
Управляющее устройство также останавливает подающий механизм 4 в ответ на команду остановки машины так, чтобы не тратить контейнеры, пока машина продолжает движение в последующем периоде остановки. Период остановки - это период приблизительно 10 с, во время которого управляющее устройство позволяет поворотной установке 12 и конвейеру 8 продолжить пошаговое перемещение, чтобы в машине 2 не оставалось частично сформированных контейнеров.
Управляющее устройство останавливает работу на каждой станции в ответ на команду на остановку машины и после прохождения последнего контейнера. После получения команды на остановку машины и после выхода из машины последнего контейнера управляющее устройство очищает сдвиговый регистр и затем через 2 секунды останавливает конвейер 8.
Управляющее устройство запрограммировано на восстановление совмещенного положения поворотной установки из положения остановки на середине шага, управляя приводом поворотной установки так, чтобы он переместился из положения половины шага в положение нормального шага, синхронизированное с виртуальной осью машины. Команда на повторный пуск выдается кнопкой повторного старта, выведенной на управляющий экран.
На практике частично сформированные контейнеры в машине 2 можно защитить от повреждения теплотой, когда работа машины приостановлена, путем программирования управляющего устройства так, чтобы оно останавливало поворотную установку в положении середины шага в ответ на команду остановки машины, и команда на остановку машины выдается нажатием либо кнопки "стоп", либо кнопки "подача" на управляющем экране. При этом также останавливается подающий механизм 4, но поворотная установка 12 и конвейер 8 продолжают пошаговое перемещение в течение 10 с, чтобы гарантировать, что в машине не осталось частично сформированных контейнеров 6 и нагревательный элемент для нагрева дна остается горячим. После того как последний готовый контейнер выйдет из машины, сдвиговый регистр управляющего устройства очищается и спустя 2 секунды конвейер 8 останавливается. Для повторного пуска машины оператор нажимает кнопку повторного пуска, выведенную на управляющий экран, и в результате управляющее устройство совмещает поворотную установку, управляя приводом поворотной установки для перемещения из положения половины шага в нормальное положение полного шага, синхронизированное с виртуальной осью машины.
На фиг. 6, 7 и 8 более подробно показана часть наполненного устройства 22 станции 20 наполнения машины 2. Поршень 72 наполняющего насоса 78 установлен для выполнения возвратно-поступательных перемещений в цилиндре 74, а в цилиндре 74 установлен механический упор 76 в исходном положении цилиндра 72. Наполняющий насос 78 расположен на станции 20 наполнения и сообщается на стороне 80 всасывания с резервуаром для продукта, а на стороне 82 выпуска сообщается с наполняющими соплами. Наполняющий насос 78 сконфигурирован для втягивания продукта из резервуара и для раздачи продукта, полученного из резервуара через наполняющие сопла. Продукт раздается через наполняющие сопла в частично сформированный контейнер 6 каждый раз, когда транспортирующее устройство 8 позиционирует частично сформированный контейнер 6 в точке для приема раздаваемого из сопел продукта.
Поршень 72 наполняющего насоса приводится в возвратно-поступательное движение в цилиндре 74 вращающимся серводвигателем 84 через рычажный сервомеханизм 86, при этом поворотным возвратно-поступательным движением серводвигателя управляет управляющее устройство.
Механический упор 76 внутри цилиндра 74 (который может быть сформирован как часть цилиндра) используется для определения исходного положения наполняющего устройства 22, когда необходимо провести синхронизацию различных частей машины 2. Нормальный рабочий ход поршня 72 не достигает упора 76, но когда запускается программа перемещения в исходное положение, серводвигатель 84 удлиняет ход поршня 72, пока упор 76 не войдет во взаимодействие с цилиндром 74. Управляющее устройство запрограммировано на опознание исходного положения поршня 72 как соответствующего угловому положению серводвигателя 84, когда отбираемая от серводвигателя мощность достигает заранее определенной величины.
На практике возврат в исходное положение осуществляется путем создания механического упора 76, расположенного так, чтобы останавливать движение поршня 72 в исходном положении и путем опознания исходного положения поршня 72 как соответствующего положению серводвигателя 84, когда отбор мощности от серводвигателя 84 достигает заранее определенной величины на 20% выше максимальной величины отбора мощности (величины номинальной мощности). Эта заранее определенная величина для большей точности, предпочтительно, равна 30% от максимальной величины отбора мощности. В других вариантах можно использовать любую подходящую заранее определенную величину, если она достаточно велика для предотвращения ошибочного представления переходных всплесков мощности как исходного положения детали, такой как поршень 72.
Настоящее изобретение относится к устройству и способу упаковки. Устройство для манипулирования частично сформированными контейнерами содержит пошаговое транспортирующее устройство, подающий механизм, выполненный с возможностью подачи на транспортирующее устройство на каждом шаге множества частично сформированных контейнеров. Устройство также содержит станцию, содержащую множество устройств, выполненных с возможностью выполнения идентичных операций на группе контейнеров, образованной множеством частично сформированных контейнеров, и управляющее устройство. Пошаговое транспортирующее устройство выполнено с возможностью перемещения указанной группы через указанную станцию. Управляющее устройство выполнено с возможностью управлять подающим механизмом, так чтобы уменьшить до целого количество подаваемых за один шаг на транспортирующее устройство частично сформированных контейнеров. Достигается уменьшение изготовления дефектных контейнеров, например незакрытых, незаполненных или незапечатанных. 2 н. и 32 з.п. ф-лы, 8 ил.
1. Устройство для манипулирования частично сформированными контейнерами, содержащее пошаговое транспортирующее устройство, подающий механизм, выполненный с возможностью подачи на транспортирующее устройство на каждом шаге множество частично сформированных контейнеров, станцию, содержащую множество устройств, выполненных с возможностью выполнения, по существу, идентичных операций на группе контейнеров, образованной множеством частично сформированных контейнеров, при этом пошаговое транспортирующее устройство выполнено с возможностью перемещения указанной группы через указанную станцию, и управляющее устройство, выполненное с возможностью управлять подающим механизмом, так, чтобы уменьшить до целого количество подаваемых за один шаг на транспортирующее устройство частично сформированных контейнеров.
2. Устройство по п.1, в котором транспортирующее устройство является устройством с двойным шагом, станция содержит пару механизмов, а управляющее устройство выполнено с возможностью управлять подающим механизмом для подачи на транспортирующее устройство одного частичного сформированного контейнера за один шаг.
3. Устройство по п.1 или 2, в котором управляющее устройство выполнено с возможностью, при получении специфического сигнала, управлять подающим механизмом так, чтобы уменьшить количество подаваемых частично сформированных контейнеров, как указано выше.
4. Устройство по п.3, далее содержащее устройство для обнаружения отказов, выполненное с возможностью обнаружения отказов в любом из множества устройств и соответственно сообщать о наличии отказа в форме указанного специфического сигнала управляющему устройству.
5. Устройство по п.3, далее содержащее устройство, выполненное с возможностью генерировать указанный специфический сигнал по команде пользователя.
6. Устройство по п.4, далее содержащее устройство, выполненное с возможностью генерировать указанный специфический сигнал по команде пользователя.
7. Устройство по п.1, далее содержащее одну или более дополнительных станций, каждая из которых содержит множество устройств, выполненных с возможностью выполнять, по существу, идентичные операции на указанной группе, при этом шаговое транспортирующее устройство выполнено с возможностью перемещать указанную группу через эту одну или более дополнительных станций.
8. Устройство по п.7, в котором множество устройств указанной станции или одной из указанных станций содержит множество наполняющих устройств.
9. Устройство по п.7, в котором множество устройств указанной станции или одной из станций содержит множество устройств для установки заливных горловин.
10. Устройство по п.7, в котором управляющее устройство выполнено с возможностью, при получении специфического сигнала, управлять подающим механизмом так, чтобы уменьшить количество подаваемых частично сформированных контейнеров, как указано выше, и в котором управляющее устройство далее выполнено с возможностью при получении указанного специфического сигнала отключать устройство этой или каждой станции в соответствии с содержанием специфического сигнала.
11. Устройство по п.7, в котором подающий механизм содержит подающую поворотную установку, загрузчик, выполненный с возможностью надевания рукавов контейнеров на радиально выступающие оправки подающей поворотной установки, по меньшей мере, одну станцию формирования контейнеров, через которую поворотная установка подающего механизма пошагово вращается для производства из рукавов контейнеров множества частично сформированных контейнеров, и снимающее устройство, выполненное с возможностью снятия частично сформированных контейнеров с оправок.
12. Устройство по п.11, в котором загрузчик выполнен с возможностью подавать рукава контейнеров только на оправки поворотной установки подающего механизма, следующие через одну друг от друга, когда подающий механизм должен уменьшить количество подаваемых на одном шаге на транспортирующее устройство частично сформированных контейнеров.
13. Устройство по п.12, в котором конструкция выполнена так, что когда загрузчик подает рукава контейнеров только на оправки поворотной установки, следующие через одну друг от друга, при этом операции этой или каждой станций формирования контейнеров на незанятых оправках отключаются.
14. Устройство по п.12 или 13, в котором конструкция выполнена так, что когда загрузчик подает рукава контейнеров только на оправки поворотной установки, следующие через одну друг от друга, операции снимающего устройства на незанятых оправках отключаются.
15. Устройство по любому из пп.11-13, в котором одна из станций формирования контейнеров содержит нагревательное устройство, при этом транспортирующее устройство далее выполнено с возможностью смещать оправки так, что они останавливаются в положениях, смещенных от нагревательного устройства, когда управляющее устройство выдает команду на прекращение работы транспортирующего устройства.
16. Устройство по п.14, в котором одна из станций формирования контейнеров содержит нагревательное устройство, при этом транспортирующее устройство далее выполнено с возможностью смещать оправки так, что они останавливаются в положениях, смещенных от нагревательного устройства, когда управляющее устройство выдает команду на прекращение работы транспортирующего устройства.
17. Устройство по п.1, в котором одно из устройств содержит подвижную механическую деталь, серводвигатель, приводящий в движение эту подвижную механическую деталь, второе управляющее устройство для управления этим серводвигателем, и механический упор для остановки подвижной механической детали в исходном положении, в котором второе управляющее устройство выполнено с возможностью следить за отбором мощности от серводвигателя и опознавать это исходное положение, как соответствующее положению серводвигателя, когда отбор мощности от серводвигателя достигнет заранее определенной величины.
18. Устройство по п.8, в котором наполняющее устройство содержит наполняющее сопло, наполняющий насос для приема продукта из резервуара для продукта и подачи этого продукта в наполняющее сопло, и другое управляющее устройство, выполненное с возможностью управлять наполняющим насосом в соответствии с выбранным одним из множества профилей электронного кулачка.
19. Способ манипулирования множеством частично сформированных контейнеров, при котором подают на шаговое транспортирующее устройство на каждом шаге множество частично сформированных контейнеров, перемещают группу, образованную таким множеством частично сформированных контейнеров через станцию, содержащую множество устройств, выполненных с возможностью выполнять, по существу, идентичные операции на этой группе, и управляют указанным перемещением так, чтобы уменьшить до целого количество частично сформированных контейнеров, перемещаемых за один шаг транспортирующего устройства.
20. Способ по п.19, в котором указанное управление подачей уменьшает количество частично сформированных контейнеров, подаваемых на одном шаге, с двух до одного.
21. Способ по п.19 или 20, далее содержащий этап, при котором определяют отказ и соответственно уменьшают до целого количество частично сформированных контейнеров, подаваемых на одном шаге.
22. Способ по п.19, далее содержащий этап, при котором в ответ на команду пользователя уменьшают до целого количество частично сформированных контейнеров, подаваемых за один шаг.
23. Способ по п.19, далее содержащий этап, при котором перемещают группу через одну или более дополнительных станций, каждая из которых содержит множество устройств, выполняющих, по существу, идентичные операции на этой группе.
24. Способ по п.23, содержащий этап, при котором наполняют указанную группу на этой станции или на одной из станций.
25. Способ по п.23, содержащий этап, при котором на указанной группе на этой станции или на одной из станций устанавливают заливные горловины.
26. Способ по п.23, далее содержащий этап, при котором отключают устройство этой станции или каждой станции, в соответствии с содержанием специфического сигнала, полученного управляющим устройством.
27. Способ по п.23, в котором этап подачи содержит загрузку рукавов контейнеров на радиально выступающие оправки поворотной установки подающего механизма, перемещают на шаг поворотную установку падающего механизма через, по меньшей мере, одну станцию формирования контейнеров для формирования рукавов контейнеров в частично сформированные контейнеры и снимают частично сформированные контейнеры с оправок.
28. Способ по п.27, в котором этап подачи включает загрузку рукавов контейнеров только на оправки, следующие через одну друг от друга.
29. Способ по п.28, далее содержащий этап, при котором отключают съем с незанятых оправок.
30. Способ по п.28, далее содержащий этап, при котором станции формирования контейнеров отключают от работы на незанятых оправках.
31. Способ по п.30, далее содержащий этап, при котором отключают съем с незанятых оправок.
32. Способ по любому из пп.27-31, в котором указанную группу нагревают на одной из станций формирования контейнеров, при этом способ далее содержит этап, при котором смещают оправки так, что при прекращении работы транспортирующего устройства, они смещены от одной из этих станций формирования контейнеров.
33. Способ по п.19, далее содержащий этап, при котором осуществляют мониторинг отбираемой мощности на серводвигателе, приводящем в движение подвижную механическую деталь, используют механический упор для остановки подвижной механической детали в исходном положении, и опознают исходное положение как соответствующее положению серводвигателя, когда отбор мощности с серводвигателя достигает заранее определенной величины.
34. Способ по п.24, далее содержащий этап, при котором управляют наполняющим насосом в соответствии с выбранным одним из множества профилей электронного кулачка.
| WO 8000950 A1, 15.05.1980 | |||
| US 3619979 A, 16.11.1971 | |||
| US 3300946 A, 31.01.1967 | |||
| Устройство для подачи предметов | 1978 |
|
SU906584A1 |

