Настоящее изобретение относится к устройствам и способам для получения, хранения и обеспечения доступа к эксплуатационным данным.
В опубликованной международной патентной заявке WO 2006/117539 А раскрыта машина для обработки частично сформированных контейнеров, которая содержит индексирующее транспортирующее устройство, подающее устройство, выполненное с возможностью подачи на транспортирующее устройство, для каждого индекса, множества частично сформированных контейнеров, одну или несколько станций, содержащих множество устройств, выполненных с возможностью выполнять по существу идентичные операции над группой контейнеров, составленной из множества частично сформированных контейнеров, при этом индексирующее транспортирующее устройство выполнено с возможностью перемещения группы через станции, а управляющее устройство выполнено с возможностью вызывать уменьшение подающим устройством до целого числа количества частичного сформированных контейнеров, поданных в расчете на один индекс на транспортирующее устройство.
Машина управляется управляющим устройством при помощи нескольких сервомеханизмов, связанных с каждой из операций, выполняемых машиной. Один из сервомеханизмов используется для возврата в исходное положение движущейся механическую части машины, при этом движущуюся механическую часть машины приводит в движение сервомотор, управляющее устройство управляет сервомотором, а механический стопор останавливает движущуюся механическую часть в исходном положении, причем управляющее устройство выполнено с возможностью контролировать развиваемую мощность сервомотора и распознавать исходное положение как положение сервомотора, в котором развиваемая мощность сервомотора достигает заданной величины.
Машина согласно этой публикации содержит устройство управления, которое контролирует мощность, развиваемую сервомотором, но в таких ситуациях, как неисправность машины, машину необходимо остановить, и в этом случае никакие данные от устройства управления получить легко нельзя.
Таким образом, задача изобретения заключается в том, чтобы преодолеть недостатки, имеющиеся в решениях, известных из уровня техники.
Согласно первому аспекту настоящего изобретения предлагается устройство, содержащее первый элемент, второй элемент, выполненный с возможностью перемещения относительно указанного первого элемента, сервомотор для приведения в движение второго элемента, логический контроллер для управления указным сервомотором, один или несколько входов в указанный логический контроллер, причем единственный вход или каждый вход предназначен для передачи эксплуатационных данных, устройство хранения данных для хранения указанных эксплуатационных данных и интерфейс к указанному устройству хранения данных, причем указанный интерфейс предназначен для обеспечения доступа к указанным эксплуатационным данным.
Согласно второму аспекту настоящего изобретения предлагается способ, содержащий этапы, на которых приводят в действие сервомотор для создания относительного перемещения между первым элементом и вторым элементом, управляют указанным сервомотором при помощи логического контроллера, принимают эксплуатационные данные на указанном логическом контроллере, сохраняют указанные эксплуатационные данные в устройстве хранения данных и предоставляют доступ к указанным эксплуатационным данным через интерфейс.
Согласно третьему аспекту настоящего изобретения предлагается упаковочная машина для формования, заполнения и запечатывания, содержащая логический контроллер для управления компонентом указанной машины, один или несколько входов в указанный логический контроллер, единственный вход или каждый вход предназначен для передачи эксплуатационных данных, устройство хранения данных для хранения указанных эксплуатационных данных, и интерфейс к указанному устройству хранения данных, причем интерфейс предназначен для обеспечения доступа к указанным эксплуатационным данным.
Согласно четвертому аспекту настоящего изобретения предлагается способ, содержащий этапы, на которых формуют частично сформированный контейнер, заполняют указанный частично сформированный контейнер, запечатывают указанный частично сформированный контейнер, управляют компонентом при помощи логического контроллера, принимают эксплуатационные данные на указанном логическом контроллере, сохраняют указанные эксплуатационные данные в устройстве хранения данных и обеспечивают доступ к указанным эксплуатационным данным через интерфейс. Благодаря изобретению можно создать и эксплуатировать устройство таким образом, что эксплуатационные данные непрерывно снимаются и сохраняются во время работы устройства. Доступ к эксплуатационным данным возможен в процессе использования устройства, что обеспечивает постоянный контроль ошибок, который может выполняться удаленно от устройства через интерфейс. В любой момент можно получить доступ к эксплуатационным параметрам и характеристикам, и их можно контролировать в режиме реального времени для предупреждения ошибок.
Предпочтительно упаковочная машина включает ультразвуковой генератор и ультразвуковой волновод для ультразвукового излучения, указанный логический контроллер предназначен для управления указанным ультразвуковым генератором, причем эксплуатационные данные от ультразвукового генератора передаются на логический контроллер.
Ниже описаны варианты выполнения настоящего изобретения, исключительно в качестве примера на прилагаемые чертежи, на которых;
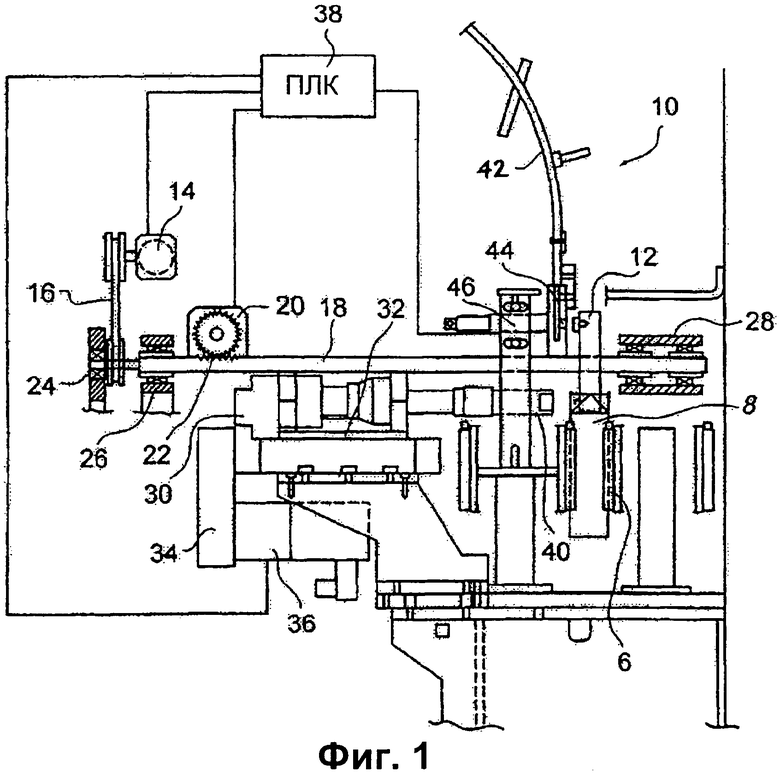
Фиг.1 - вид сбоку, частично схематический, частично фрагментарный, частично в разрезе, станции установки элементов упаковочной машины для формования, заполнения и запечатывания, и
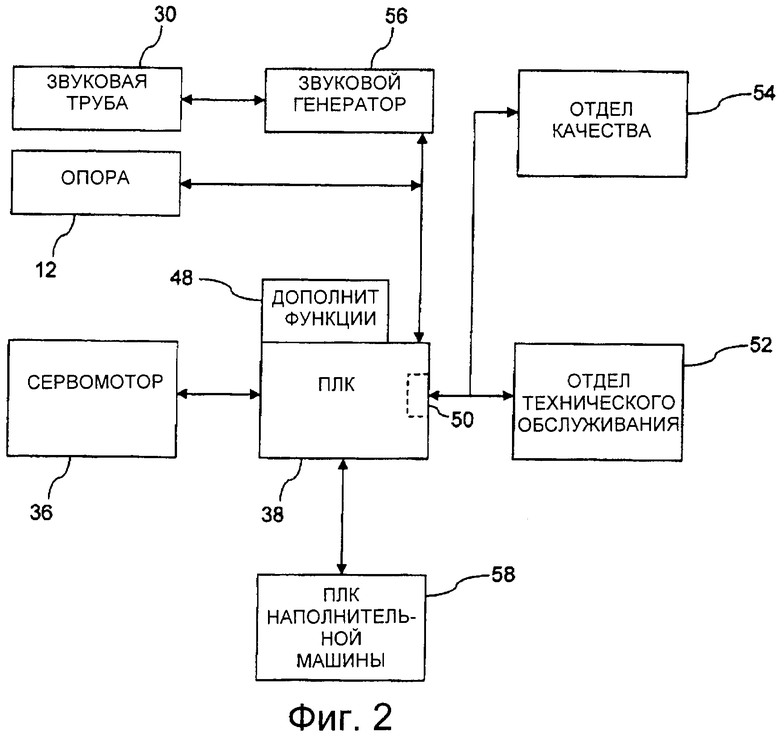
Фиг.2 - схема компонентов машины и фиг.1.
На фиг.1 приведена станция 10 установки элементов, используемая в качестве составной части упаковочной машины для формования, заполнения и запечатывания. Станция 10 может использоваться для установки приспособления для наливания на пакеты, используемые в качестве упаковки для жидких пищевых продуктов, таких как молоко или фруктовый сок. Пакеты сделаны из слоистого материала, содержащего картонную основу и внутренний и наружный слои из влагонепроницаемого термопласта, причем между основной и внутренним слоем может иметься непроницаемый для кислорода слой из алюминия или термопласта. Бесконечные цепные транспортеры 6 периодически перемещают стакан 8 пакета с открытым верхом и запечатанным дном через различные станции машины, в том числе через станцию 10 установки элементов.
На фиг.1 первый элемент, выполняющий функцию опоры, имеет вид вращающейся крестовины с четырьмя захватами, которая выполнена с возможностью совершать возвратно-поступательные движения в горизонтальной плоскости и вращаться вокруг собственной оси. Такая крестовина известна, например, из машины Elopak ® P-S120UC, описанной в патентной заявке PCT/GB2006/003722. Крестовина 12 вращается под действием электрического поворотного сервомотора 14 при помощи трансмиссии 16 в виде ременной передачи, при этом горизонтальный вал 18, на котором закреплена крестовина 12, вращается шаговым образом вокруг собственной оси.
Электрический поворотный сервомотор 20, управляемый таким образом, чтобы периодически менять направление вращения, вызывает возвратно-поступательное движение вала 18 посредством реечной передачи 22. Вал 18 поддерживается подшипниками 24, 26 и 28, допускающими и вращение, и возвратно-поступательное движение вала 18. На горизонтальном полозе установлена ультразвуковая труба, которая сама совершает возвратно-поступательное движение вдоль оси под действием привода 34, включающего в себя электрический поворотный сервомотор 36.
Программируемый логический контроллер (ПЛК) 38 управляет различными элементами средства 10 установки, такими как сервомоторы 14, 20 и 36. Например, выходной мощностью сервомотора 36 ПЛК 38 управляет таким образом, чтобы сила, прикладываемая вторым элементом, волноводом 40, к наружной поверхности пакета 8, подпираемого опорой 12, не превышала заданную требуемую величину, хранящуюся в ПЛК 38. Ниже более подробно описана работа логического контроллера 38 со ссылкой на фиг.2.
Когда устройство 10 установки работает, одно или несколько приспособлений для наливания принимаются опорой 12 посредством приведения ее в действие при помощи линейного привода, перемещающего опору 12 из отведенного положения в исходное положение, в котором опора 12 принимает приспособление из выхода подающего канала. Пара подающих приспособления гравитационных каналов 42 с соответствующими выходами 44, имеющими соответствующие поршневые выталкиватели 46, подают приспособления для наливания. Затем линейный двигатель приводится в действие для перемещения опоры 12 из исходного положения в отведенное положение. Затем поворотный привод опоры 12 приводится в действие для поворота опоры из отведенного положения во вставленное положение, перенося приспособление вниз в открытый верх пакета 8.
Затем приводится в действие линейный привод опоры для перемещения опоры 12 из отведенного положения в положение установки, в результате чего опора 12 вставляет цилиндрический участок приспособления в сквозное отверстие в стенке пакета, пока периферический бортик приспособления не соприкоснется с внутренней поверхностью участка стенки, окружающего сквозное отверстие, останавливая тем самым перемещение опоры.
Одновременно или примерно одновременно с тем, как линейный привод опоры перемещает бортик приспособления до соприкосновения с внутренней поверхностью стенки пакета, привод волновода приводится в действие для перемещения ультразвукового волновода из отведенного положения в положение сварки, при этом в положении сварки волновод 40 касается наружной поверхности участка стенки пакета, окружающего сквозное отверстие. Затем волновод 40 приводится в действие для приваривания бортика приспособления к стенке пакета посредством передачи ультразвуковой энергии стенке пакета и бортику приспособления, когда ультразвуковой волновод 40 находится в положении сварки, а опора 40 находится в положении установки.
На фиг.2 более подробно показан логический контроллер 38 относительно сервомотора 36, являющегося сервомотором, который при помощи привода 34 создает возвратно-поступательное движение ультразвуковой трубы 30. Труба 30 включает в себя волновод 40, который воздействует на опору 12, когда приспособление для наливания устанавливается на пакет 8. Логический контроллер 38 управляет работой сервомотора 36 и получает обратно от этого мотора 36, и от других компонентов в станции 10, эксплуатационные данные, которые сохраняются логическим контроллером 38. Логический контроллер 38 снабжен одним или несколькими входами, причем один или несколько входов предназначены для передачи эксплуатационных данных. Имеется устройство хранения данных, либо встроенное, либо внешнее по отношению к логическому контроллеру 38, для хранения эксплуатационных данных.
Эксплуатационные данные могут включать в себя такую информацию, как мощность, развиваемую сервомотором 36, данные о характеристиках, собранные от ультразвукового генератора 56, такие как колебания частоты, резонансная частота, частоты на начало и конец сварки, продолжительность каждой сварки, значения энергии и отключения питания, и данные, собранные от контролирующих устройств, таких как температурный датчик. Такие устройства, как температурный датчик, подают свои эксплуатационные данные логическому контроллеру 38 через функциональный блок 48. Все эксплуатационные данные, принятые логическим контроллером 38, непрерывно сохраняются, поскольку эти данные принимаются на различных входах логического контроллера 38. Эксплуатационные данные для каждой отдельной сварки, выполняемой станцией 10, сохраняются логическим контроллером 38, что обеспечивает их полную прослеживаемость.
Эксплуатационные данные могут контролироваться в процессе их приема и могут также оцениваться подходящим устройством, удаленным от станции 10, через интерфейс 50 логического контроллера 38. Например, логический контроллер 38 может быть снабжен сетевым интерфейсом 50, который может обеспечивать соединение контроллера 38 с Интернетом. В этом случае компьютер с надлежащим IP адресом и доступом через систему безопасности может через сетевой интерфейс 50 логического контроллера 38 получить доступ к эксплуатационным данным, сохраненным контроллером 38. Интерфейс 50 предназначен для связи с устройством хранения данных (которое является либо встроенным, либо внешним относительно логического контроллера 38), при этом интерфейс 50 предназначен обеспечивать доступ к эксплуатационным данным.
Интерфейс 50 может включать в себя фильтр для ограничения доступа внешних устройств только той частью эксплуатационных данных, которые сохранены логическим контроллером 38. К сетевому интерфейсу 50 могут быть подключены отдел 52 технического обслуживания и отдел 54 проверки качества, а фильтр в интерфейсе 50 может быть сконфигурирован таким образом, чтобы каждый из этих отделов имел доступ к различным поднаборам эксплуатационных данных, сохраненных логическим контроллером 38.
Логический контроллер 38 может быть выполнен с возможностью контроля эксплуатационных данных для осуществления контроля ошибок в режиме реального времени. Каждому параметру эксплуатационных данных, контролируемых логическим контроллером 38, может быть задана допустимая погрешность от заданного оптимального значения. Допустимая погрешность может составлять, например, +/-3%. Логический контроллер 38 может быть выполнен с возможностью выдачи предупреждения, когда допустимая погрешность превышена в каком-либо из параметров, составляющих эксплуатационные данные. Это предупреждение может выдаваться локально или или может передаваться логическим контроллером 38 удаленному устройству.
Допустимые погрешности также могут контролироваться для регулировки характеристик станции 10, даже если предупреждение о наличии погрешности специально не выдается. Например, если обнаружено, что один контролируемый параметр эксплуатационных данных отклонился от оптимального значения, хотя и находится в пределах допустимой погрешности, может быть выполнена регулировка работы компонентов, управляемых логическим контроллером 38, для обеспечения наилучшей возможной работы станции 10.
Другой тип ошибки, который может контролироваться логическим контроллером 38, - это отсутствие пакета 8 и (или) приспособления для наливания, которое должно быть прикреплено к пакету 8. Если по какой-либо причине отсутствует пакет 8 и (или) приспособление для наливания, то логический контроллер 38 может быть выполнен с возможностью обеспечения незапуска ультразвуковой трубы 30. Функциональный блок 48 может быть соединен с устройством, которое контролирует наличие необходимых пакета 8 и приспособления и предоставляет эксплуатационные данные об этом логическому контроллеру 38.
Логический контроллер 38 может контролировать эксплуатационные данные с целью регулировки работы компонентов, с которыми он связан. Например, если логический контроллер 38 получает эксплуатационные данные от температурного датчика, которые показывают, что температура в области волновода 40 повышается, то в ответ на это может быть выполнено изменение эксплуатационных параметров ультразвуковой трубы 30. Частота ультразвуковой сварки может быть изменена с учетом повышения температуры, что позволяет сэкономить энергию в ультразвуковой трубе 30.
Логический контроллер 38 может быть снабжен пользовательским интерфейсом в качестве альтернативы или дополнения к сетевому интерфейсу 50. Этот локальный пользовательский интерфейс может включать в себя, например, устройство отображения и клавиатуру. Это позволяет контролировать на месте эксплуатационные данные, сохраненные логическим контроллером 38. Предупреждения, генерируемые логическим контроллером 38, также могут выдаваться через этот пользовательский интерфейс.
Пользовательский интерфейс можно также использовать для выбора эксплуатационных характеристик, таких как тип пакета или конфигурация приспособления для наливания, которые предполагается использоваться на станции 10. Выбор пользователем эксплуатационных характеристик изменяет заданные оптимальные параметры, управление и контроль которых осуществляется логическим контроллером 38.
К логическому контроллеру 38 станции 10 подключены другие логические контроллеры, имеющиеся в машине для формования, заполнения и запечатывания, такие как ПЛК 58 наполнительной машины. Эксплуатационные данные могут распределяться между различными логическими контроллерами, и контроль характеристик, регулировка характеристик и предупреждение об ошибках могут включать в себя эксплуатационные данные, полученные множеством логических контроллеров. Интерфейс 50 логического контроллера 38 можно использовать для доступа к эксплуатационным данным, сохраненным другими логическими контроллерами в упаковочной машине типа "формование, заполнение, запечатывание".
| название | год | авторы | номер документа |
|---|---|---|---|
| УПАКОВОЧНАЯ МАШИНА И СПОСОБ УПАКОВКИ | 2010 |
|
RU2530506C2 |
| УПАКОВОЧНАЯ И ФАСОВОЧНАЯ МАШИНА | 2009 |
|
RU2503594C2 |
| ЗАПЕЧАТЫВАЮЩЕЕ ПРИСПОСОБЛЕНИЕ ДЛЯ УПАКОВОЧНОЙ МАШИНЫ | 2020 |
|
RU2799754C2 |
| УПАКОВОЧНАЯ МАШИНА | 1994 |
|
RU2109662C1 |
| РАБОЧАЯ МАШИНА И СПОСОБ МОНИТОРИНГА СИСТЕМЫ УПРАВЛЕНИЯ НА РАБОЧЕЙ МАШИНЕ | 2018 |
|
RU2776166C2 |
| СПОСОБ УПАКОВКИ И УПАКОВОЧНАЯ МАШИНА | 2019 |
|
RU2791891C2 |
| Упаковочная машина | 2021 |
|
RU2822074C2 |
| УПАКОВОЧНАЯ МАШИНА И СПОСОБ СВАРКИ В УПАКОВОЧНОЙ МАШИНЕ | 2017 |
|
RU2743520C2 |
| УПАКОВОЧНЫЙ ЛАМИНАТ ДЛЯ УПАКОВОЧНОГО КОНТЕЙНЕРА, А ТАКЖЕ УПАКОВОЧНЫЕ КОНТЕЙНЕРЫ, ПРОИЗВЕДЕННЫЕ ИЗ УПАКОВОЧНОГО ЛАМИНАТА | 2012 |
|
RU2612690C2 |
| ФАЛЬЦОВОЧНЫЙ УЗЕЛ ДЛЯ УПАКОВОЧНЫХ МАШИН ТЕКУЧИХ ПИЩЕВЫХ ПРОДУКТОВ | 2013 |
|
RU2617339C2 |
Группа изобретений относится к упаковочным машинам и способам управления ими. Упаковочная машина содержит первый элемент, второй элемент, сервомотор, логический контроллер, устройство хранения данных и интерфейс устройства хранения данных. Сервомотор перемещает второй элемент относительно первого элемента. Логический контроллер управляет сервомотором. При осуществлении способа управления упаковочной машиной приводят в действие сервомотор. Управляют сервомотором посредством логического контроллера. Принимают эксплуатационные данные на контроллере. Сохраняют данные в устройстве хранения данных. Обеспечивают доступ к данным через интерфейс. Обеспечивается возможность легкого доступа к эксплуатационным данным в случае остановки машины. 4 н. и 36 з.п. ф-лы, 2 ил.
1. Упаковочная машина, содержащая
первый элемент машины,
второй элемент машины, выполненный с возможностью перемещения относительно указанного первого элемента машины,
сервомотор для приведения в движение указанного второго элемента машины,
логический контроллер для управления указанным сервомотором,
один или несколько входов указанного логического контроллера, причем вход или каждый вход предназначен для передачи эксплуатационных данных,
устройство хранения данных для хранения указанных эксплуатационных данных, и
интерфейс к указанному устройству хранения данных, причем указанный интерфейс предназначен для обеспечения доступа к указанным эксплуатационным данным.
2. Машина по п.1, дополнительно содержащая выход указанного сервомотора, причем указанный выход соединен с входом или одним из входов указанного логического контроллера.
3. Машина по п.1 или 2, дополнительно содержащая ультразвуковой генератор и ультразвуковой волновод для излучения ультразвука, при этом указанный логический контроллер предназначен для управления указанным ультразвуковым генератором.
4. Машина по п.3, в которой указанный второй элемент машины включает в себя указанный ультразвуковой волновод.
5. Машина по п.3, дополнительно содержащая выход указанного ультразвукового генератора, причем указанный выход соединен с входом или одним из входов указанного логического контроллера.
6. Машина по п.1, дополнительно содержащая температурный датчик, соединенный с входом или одним из входов указанного логического контроллера.
7. Машина по п.1, в которой указанный логический контроллер выполнен с возможностью контролировать указанные эксплуатационные данные и обнаруживать ошибку в указанных эксплуатационных данных.
8. Машина по п.7, в которой указанный логический контроллер выполнен с возможностью обнаруживать ошибку в указанных эксплуатационных данных, если указанные эксплуатационные данные превышают заданную допустимую погрешность.
9. Машина по п.7, в которой указанный логический контроллер выполнен с возможностью передавать сигнал об ошибке на указанный интерфейс после обнаружения ошибки.
10. Машина по п.1, в которой логический контроллер выполнен с возможностью контролировать указанные эксплуатационные данные и соответственным образом приспосабливать управление указанным сервомотором.
11. Способ управления упаковочной машиной, содержащий
приведение в действие сервомотора для создания относительного перемещения между первым элементом машины и вторым элементом машины,
управление указанным сервомотором посредством логического контроллера,
прием эксплуатационных данных на указанном логическом контроллере, сохранение указанных эксплуатационных данных в устройстве хранения данных и
обеспечение доступа к указанным эксплуатационным данным через интерфейс.
12. Способ по п.11, дополнительно содержащий передачу эксплуатационных данных от указанного сервомотора к указанному логическому контроллеру.
13. Способ по п.11, дополнительно содержащий приведение в действие ультразвукового генератора для излучения ультразвука и управление указанным ультразвуковым генератором посредством указанного логического контроллера.
14. Способ по п.13, дополнительно содержащий передачу эксплуатационных данных от указанного ультразвукового генератора указанному логическому контроллеру.
15. Способ по любому из пп.11-14, дополнительно содержащий приведение в действие температурного датчика и передачу эксплуатационных данных от указанного температурного датчика указанному логическому контроллеру.
16. Способ по любому из пп.11-14, дополнительно содержащий контролирование указанных эксплуатационных данных и обнаружение ошибки в указанных эксплуатационных данных.
17. Способ по п.16, в котором указанное обнаружение ошибки в указанных эксплуатационных данных содержит обнаружение того, что указанные эксплуатационные данные превышают заданную допустимую погрешность.
18. Способ по п.16, дополнительно содержащий передачу сигнала об ошибке после обнаружения ошибки.
19. Способ по любому из пп.11-14, дополнительно содержащий контролирование указанных эксплуатационных данных и соответственным образом приспосабливание управления указанным сервомотором.
20. Упаковочная машина для формования, заполнения и запечатывания, содержащая
логический контроллер для управления компонентом указанной машины, один или более входов указанного логического контроллера, причем вход или каждый из входов предназначен для передачи эксплуатационных данных,
устройство хранения данных для хранения указанных эксплуатационных данных, и
интерфейс указанного устройства хранения данных, причем указанный интерфейс предназначен для обеспечения доступа к указанным эксплуатационным данным.
21. Машина по п.20, дополнительно содержащая первый элемент машины и второй элемент машины, выполненный с возможностью перемещения относительно указанного первого элемента машины, причем указанный компонент содержит сервомотор для перемещения указанного второго элемента машины.
22. Машина по п.21, дополнительно содержащая выход указанного сервомотора, причем указанный выход соединен с входом или одним из входов указанного логического контроллера.
23. Машина по пп.20, 21 или 22, дополнительно содержащая ультразвуковой генератор и ультразвуковой волновод для излучения ультразвука, при этом указанный логический контроллер предназначен для управления указанным ультразвуковым генератором.
24. Машина по п.23, дополнительно содержащая первый элемент машины и второй элемент машины, выполненный с возможностью перемещения относительно указанного первого элемента машины, причем указанный компонент содержит сервомотор для приведения в движение указанного второго элемента машины, а указанный второй элемент машины включает в себя указанный ультразвуковой волновод.
25. Машина по п.24, дополнительно содержащая выход указанного ультразвукового генератора, причем указанный выход соединен с входом или одним из входов указанного логического контроллера.
26. Машина по любому из пп.20-22, дополнительно содержащая температурный датчик, соединенный с входом или с одним из входов логического контроллера.
27. Машина по любому из пп.20-22, в которой логический контроллер выполнен с возможностью контролирования эксплуатационных данных и обнаружения ошибки в указанных эксплуатационных данных.
28. Машина по п.27, в которой логический контроллер выполнен с возможностью обнаружения ошибки в указанных эксплуатационных данных, если указанные эксплуатационные данные превышают заданную допустимую погрешность.
29. Машина по п.27, в которой логический контроллер выполнен с возможностью передачи на указанный интерфейс сигнала об ошибке после обнаружения ошибки.
30. Машина по п.21 или 22, в которой указанный логический контроллер выполнен с возможностью контролирования указанных эксплуатационных данных и соответственного приспосабливания управления указанного сервомотора.
31. Способ управления упаковочной машиной для формования, заполнения и запечатывания, содержащий
формирование частично сформированного контейнера,
заполнение указанного частично сформированного контейнера,
запечатывание указанного частично сформированного контейнера,
управление компонентом посредством логического контроллера,
прием эксплуатационных данных на указанном логическом контроллере,
сохранение указанных эксплуатационных данных в устройстве хранения данных и обеспечение доступа к указанным эксплуатационным данным через интерфейс.
32. Способ по п.31, в котором указанным компонентом является сервомотор, причем способ дополнительно содержит приведение указанного сервомотора в действие для создания относительного перемещения между первым элементом машины и вторым элементом машины.
33. Способ по п.32, дополнительно содержащий передачу эксплуатационных данных от указанного сервомотора на указанный логический контроллер.
34. Способ по п.32, дополнительно содержащий приведение в действие ультразвукового генератора для излучения ультразвука и управление указанным ультразвуковым генератором посредством указанного логического контроллера.
35. Способ по п.34, дополнительно содержащий передачу эксплуатационных данных от указанного ультразвукового генератора на указанный логический контроллер.
36. Способ по любому из пп.31-35, дополнительно содержащий приведение в действие температурного датчика и передачу эксплуатационных данных от указанного температурного датчика на указанный логический контроллер.
37. Способ по любому из пп.31-35, дополнительно содержащий контролирование указанных эксплуатационных данных и обнаружение ошибки в указанных эксплуатационных данных.
38. Способ по п.37, в котором указанное обнаружение ошибки в указанных эксплуатационных данных содержит обнаружение того, что эксплуатационные данные превышают заданную допустимую погрешность.
39. Способ по п.38, дополнительно содержащий передачу сигнала об ошибке после обнаружения ошибки.
40. Способ по любому из пп.31-35, дополнительно содержащий контролирование указанных эксплуатационных данных и соответствующим образом приспосабливание управления указанным сервомотором.
| US 5484374 А, 16.01.1996 | |||
| US 5966897 A, 19.10.1999 | |||
| Способ и устройство для производства рентгеновских снимков короткой продолжительности | 1926 |
|
SU5395A1 |

