Изобретение относится к системам ориентации и навигации подвижных объектов различного типа, в частности к гирогоризонткомпасам (ГГК), в которых используется измерительная информация, получаемая с датчиков угловых скоростей (ДУС) (волоконно-оптических или иного типа) и с блока акселерометров.
Известны бесплатформенные инерциальные навигационные системы (БИНС) [Интегрированные системы ориентации и навигации для морских подвижных объектов / О.Н.Анучин, Г.И.Емельянцев / Под общей ред. академика РАН В.Г.Пешехонова. Изд. 2-е, переработанное и дополненное. - СПб.: ГНЦ РФ - ЦНИИ «Электроприбор», 2003].
Информационную основу измерения динамических параметров (линейных и угловых) движения объекта БИНС составляет измерительный блок (ИБ) и прибор управления, контроля и обработки информации, ИБ включает три линейных акселерометра и три ДУС (волоконно-оптических или иного типа), а также предусмотрены модуляционные развороты ИБ вокруг оси, перпендикулярной плоскости палубы, в диапазоне ±180°. Сигналы ДУС, акселерометров и сигнал датчика угла об угле разворота ИБ относительно корпуса используются для вычисления матрицы направляющих косинусов между связанной и навигационной системой координат, которая используется для преобразования кажущихся ускорений, измеренных линейными акселерометрами, и выработки выходных данных БИНС. Предусмотрено комплексирование данных ИБ с данными, полученными от спутниковой навигационной системы (СНС).
В качестве прототипа по наибольшему числу общих существенных признаков был принят ГГК [Игнатьев С.В. Гирогоризонткомпас на волоконно-оптических гироскопах с вращением блока чувствительных элементов // Навигация и управление движением. Сб. докладов IV конференции молодых ученых. СПб.: ГНЦ РФ - ЦНИИ «Электроприбор», 2002. С.291-298], содержащий измерительный модуль (ИМ) на волоконно-оптических гироскопах (ВОГ) и акселерометрах со встроенной электроникой, а также бортовой вычислитель, располагающиеся на платформе, вращающейся вокруг оси, перпендикулярной к плоскости основания. Вращение обеспечивается безредукторным приводом, работой которого управляет микроконтроллер, связанный с бортовым вычислителем. Электрические связи подвижной части с неподвижным основанием осуществляются через скользящий токоподвод неограниченного вращения с многократным резервированием основных линий связи. Связь с приемником спутниковой навигационной системы (СНС) и потребителем осуществляется по последовательному интерфейсу RS232. ГГК, построенный на ВОГ средней точности (дрейф порядка 10 - 1°/час), не обеспечивает необходимую точность определения курса. В связи с этим применена схема автокомпенсации уходов горизонтальных ВОГ и в результате достигается нужная точность при движении объекта с постоянной скоростью и курсом. Бортовой вычислитель получает данные от ИМ в виде трех угловых скоростей и трех ускорений, угол поворота привода вращения, внешнюю информацию от СНС и, решая задачи выработки параметров ориентации и поступательного движения, строит вертикаль и курс с периодом, значительно меньшим периода Шулера, корректируя выходные данные по информации от СНС.
Недостатком устройства-прототипа является то, что, при решении задач выработки параметров ориентации и поступательного движения, в бортовом вычислителе моделируются вертикаль с коротким периодом, что при маневрировании объекта и непосредственно после маневра, а также при кратковременном пропадании сигналов внешней информации от СНС приводит к тому, что вертикаль места возмущается и, следовательно, ошибки построения вертикали и курсоуказания могут достигать значительных величин.
Задачей изобретения является повышение точности выработки параметров ориентации. Поставленная задача решается тем, что в бортовой вычислитель вводится блок управления режимами, который для уменьшения влияния ускорений, возникающих при маневрировании объекта или при кратковременном пропадании сигналов внешней информации от СНС, реализует автоматический переход в режим работы, при котором вертикаль работает в невозмущаемом и недемпфированном режиме с периодом Шулера, а компасная линия работает в режиме гироазимута.
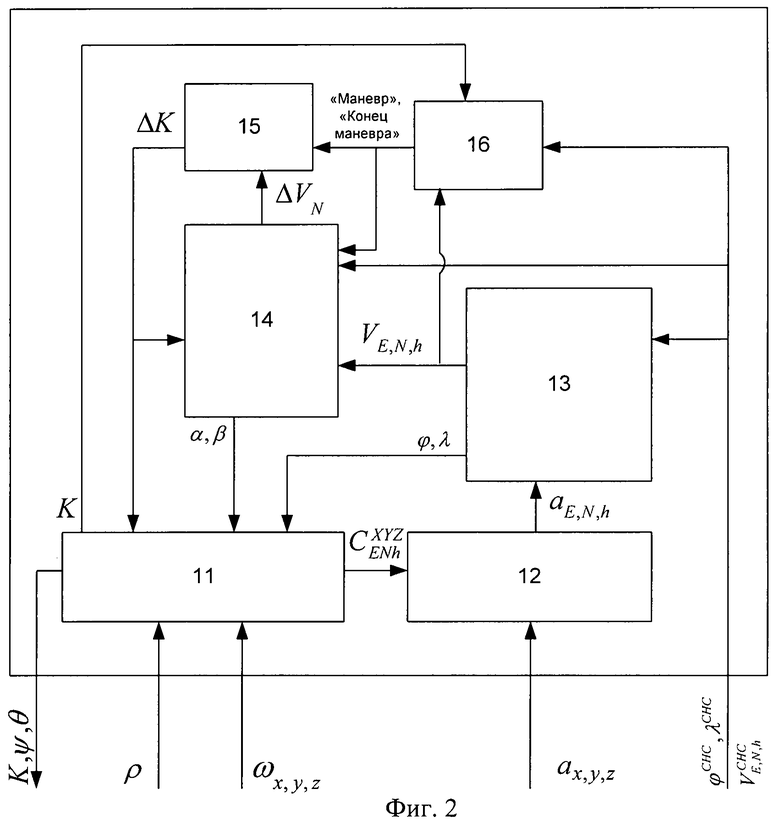
Сущность изобретения поясняется чертежами, где на фиг.1 обозначены элементы конструкции устройства, на фиг.2 приведена блок-схема бортового вычислителя, на фиг.3 - схема контура построения вертикали, на фиг.4 - схема блока построения курсового канала:
1 - триада ВОГ;
2 - триада акселерометров;
3 - вращающийся вал;
4 - моментный двигатель;
5 - датчик угла поворота вала;
6 - корпус прибора;
7 - аналого-цифровой преобразователь;
8 - бортовой вычислитель;
9 - выходные разъемы;
10 - скользящий круговой токоподвод;
11 - блок выработки параметров ориентации;
12 - блок преобразования кажущихся ускорений;
13 - блок выработки параметров поступательного движения;
14 - блок построения вертикали;
15 - блок построения курсового канала;
16 - блок управления режимами;
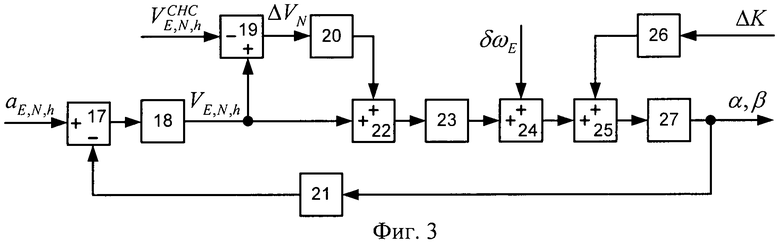
17, 19, 22, 24, 25, 30, 32 - сумматор;
18, 27, 29, 33 - интегратор;
20 - стационарный фильтр F(p);
21 - умножение на ускорение свободного падения g;
23 - деление на радиус Земли R;
26 - ошибка в учете горизонтальной составляющей скорости вращения Земли, обусловленная неточным знанием курса, ΔК·Ω·cosφ;
28, 31 - деление на постоянную времени курсового канала Tz;
34 - коэффициент приведения размерностей Кz;
aE, aN, ah - линейные ускорения объекта в проекции на оси географической системы координат;
aX, aY, aZ - линейные ускорения объекта в проекции на оси связанной с прибором системы координат;
 - матрица перехода от связанной с прибором системы координат к географической системе координат;
- матрица перехода от связанной с прибором системы координат к географической системе координат;
VE, VN, Vh - линейные скорости объекта в проекции на оси географической системы координат;
 ,
, ,
, - линейные скорости объекта в проекции на оси географической системы координат, получаемые от СНС;
- линейные скорости объекта в проекции на оси географической системы координат, получаемые от СНС;
α, β - погрешности построения вертикали места;
φ, λ - координаты места, вырабатываемые прибором;
φСНС, λСНС - координаты места, получаемые от СНС;
К, ψ, θ - углы курса, бортовой и килевой качки, вырабатываемые прибором;
ρ - угол, измеряемый датчиком угла поворота вала 5;
ωX, ωY, ωZ - угловые скорости вращения в проекции на оси связанной с прибором системы координат;
ΔК - погрешность определения курса;
ΔVN - разность северных составляющих скоростей, вырабатываемых прибором и получаемых от СНС;
δωE, δωZ - дрейф "восточного" и азимутального гироскопа.
Функционирует ГГК представленной конструкции следующим образом.
Инерциальный измерительный модуль, в виде триады ВОГ 1 и триады акселерометров 2, в котором измерительные оси гироскопов взаимно ортогональны, а измерительные оси акселерометров параллельны осям гироскопов, установлен на вращающемся, имеющем шарикоподшипниковые опоры валу 3, на котором также установлен ротор моментного двигателя 4 и ротор датчика угла поворота вала 5, а на корпусе прибора 6 установлены соответственно статор моментного двигателя 4 и электрический преобразователь датчика угла поворота вала 5, при этом выходы триады ВОГ 1 и триады акселерометров 2 соединены с соответствующими входами аналого-цифрового преобразователя (АЦП) 7, выход которого соединен с входом бортового вычислителя 8, вырабатывающего параметры ориентации, в качестве устройства связи выходов бортового вычислителя 8 с выходными разъемами 9, расположенными на корпусе 6, использован скользящий круговой токоподвод 10.
Угловые скорости вращения ωX, ωY, ωZ, измеренные триадой ВОГ 1 и преобразованные АЦП 8 из аналогового сигнала в цифровой, а также угол ρ, измеряемый датчиком угла поворота вала 5, поступают в блок выработки параметров ориентации 11, где по этим данным, а также по данным о координатах места φ и λ формируется матрица перехода от связанной с прибором системы координат (ССК) к географической системе координат (ГСК) . Из элементов матрицы рассчитываются углы курса, бортовой и килевой качки К, ψ, θ, которые являются выходными данными ГГК. Линейные ускорения aX, aY, aZ, измеряемые триадой акселерометров 2, а также матрица поступают на вход блока преобразования кажущихся ускорений 12, где линейные ускорения aX, aY, aZ в ССК преобразовываются в линейные ускорения aE, aN, ah в ГСК. Линейные ускорения aE, aN, ah поступают на вход блока выработки параметров поступательного движения 13, где вычисляются линейные скорости объекта в ГСК VE, VN, Vh, а также координаты места φ и λ, которые корректируются по данным о линейных скоростях ,, и координатах места φСНС и λСНС, получаемых от СНС. Вычисленные координаты места φ и λ поступают на вход блока выработки параметров ориентации 11.
Данные о линейных скоростях VE, VN, Vh и ,, поступают на вход контура построения вертикали 14, где формируются погрешности построения вертикали места α и β. Блок-схема контура построения вертикали приведена на фиг.3. За основу взят контур Шулера, корректируемый по данным от приемника СНС. В цепи коррекции используется стационарный фильтр 20 с передаточной функцией:
 ,
,
где  - постоянная времени Шулера,
- постоянная времени Шулера,
TB<<ТШ - постоянная времени канала построения вертикали.
По данным о линейных скоростях VE, VN, Vh и ,, формируются разности скоростей ΔVE, ΔVN, которые поступают на вход фильтра 20. Вход фильтра 20 суммируется с выходом интегратора 18, делится на радиус Земли и поступает на вход второго интегратора 27. Принцип гирокомпасирования основан на том, что в выходном сигнале "восточного" гироскопа содержится составляющая Ω·cos(φ)·ΔК, где Ω - скорость вращения Земли, φ - широта места.
Данные о разности северной составляющей скорости ΔVN поступают на вход блока построения курсового канала 14, где вырабатывается погрешность определения курса ΔК. Блок-схема блока построения курсового канала приведена на фиг.4. Курсовой канал ГГК можно рассматривать как следящую систему, обнуляющую показания "восточного" гироскопа. Основная ошибка в курсоуказании связана с дрейфом "восточного" гироскопа δωE, для уменьшение влияния этого дрейфа применено автокомпенсационное вращение. Для исключения влияния постоянной составляющей скорости дрейфа "вертикального" гироскопа δωZ на курсоуказание в канал включено изодромное звено.
Данные о погрешностях построения вертикали места α и β и определения курса ΔК поступают на вход блока выработки параметров ориентации 10, для корректировки параметров ориентации К, ψ, θ.
При пропадании сигнала от СНС или при маневрировании разность скоростей ΔVE, ΔVN начинает расти, вследствие чего вертикаль возмущается, и ошибки вертикали и курсоуказания начинают значительно увеличиваться.
Особенностью данного устройства является наличие в бортовом вычислителе 7 блока управления режимами 15. По данным о линейных скоростях VE, VN, Vh и ,, и курсе К блок управления режимами 15 формирует сигналы «Маневр» и «Конец маневра» и осуществляет автоматическое переключение между двумя режимами работы:
- штатный режим, который характеризуется наличием короткопериодной вертикали и гирокомпасной схемы;
- автономный режим, который возникает при получении сигнала «Маневр» или при пропадании или недостоверности сигнала от СНС и прекращается при получении сигнала «Конец маневра» или возобновлении подачи сигнала от СНС. При этом для перехода в автономный режим достаточно наличия хотя бы одного из перечисленных выше сигналов, а для перехода в штатный режим необходимо одновременное наличие двух сигналов: «Конец маневра» и достоверность информации от СНС. В автономном режиме вертикаль настроена на период Шулера, а гирокомпасная линия переходит в режим гироазимута.
Используется следующий алгоритм формирования сигналов «Маневр» и «Конец маневра».
Введем обозначения текущих приращений линейной скорости и приборного курса:
dVe(i); dVn(i); dKП(i),

где i - текущее значение такта вычисления.
Суммарное значение приращения линейной скорости и приборного курса за n1 и n2 тактов соответственно определяется скользящим средним в соответствии с выражениями:
 ;
;
 ;
;
где m принимает значения от 1 до последнего такта реализации.
Определение сигналов «Маневр» и «Конец маневра»
Если ΔКП(m)>ΔKd; ΔV(m)>ΔVd, то сигнал «Маневр»,
если ΔКП(m)≤ΔKd; ΔV(m)≤ΔVd, сигнал «Конец маневра»,
где ΔKd, ΔVd - допустимое изменение приборного курса и приращения скорости соответственно.
Переключение из штатного режима в автономный производится следующим образом: как в линии вертикали, так и в линии курса на входы фильтров перестает поступать разность скоростей ΔVE, ΔVN; входы и выходы фильтров замораживаются и, следовательно, вертикаль работает в невозмущаемом и недемпфированном режиме с периодом Шулера, а компасная линия работает в режиме гироазимута.
Обратный переход из автономного режима в штатный происходит при возобновлении получения информации о скорости СНС и при отсутствии сигнала «Маневр», при этом возобновляется подача сигнала на входы фильтров вертикали и курсового канала и формируется разность между текущей скоростью прибора VE, VN, Vh и скоростью от СНС ,,. При этом для уменьшения переходного процесса непосредственно после перехода в штатный режим применяется следующий алгоритм.
Пусть ΔV1 - сигнал на входе фильтра в момент перехода в автономный режим, a ΔV2 - сигнал на входе фильтра при переходе в штатный режим. Тогда
 .
.
где ΔV'(m)=ΔV2, при m, соответствующем моменту перехода в штатный режим, в дальнейшем m меняется в соответствии с текущими данными БИНС и СНС;
ΔV(m) - сигнал на входах фильтров вертикали и курса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2571199C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2550592C1 |
| ГИРОГОРИЗОНТКОМПАС | 2016 |
|
RU2617136C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| АВТОНОМНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2015 |
|
RU2578247C1 |
| Способ построения инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию, и устройство для его осуществления | 2015 |
|
RU2616087C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2610022C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |

Изобретение относится к измерительной технике в гироскопических системах ориентации и навигации подвижных объектов различных типов и может быть использовано для малогабаритных морских и наземных объектов. Технический результат - повышение точности. Для достижения данного результата гирогоризонткомпас содержит измерительный модуль, выполненный в виде триады волоконно-оптических гироскопов средней точности, триады акселерометров и бортового вычислителя, причем измерительные оси гироскопов и акселерометров взаимно ортогональны и параллельны друг другу. Для автокомпенсации инструментальных погрешностей чувствительных элементов предусмотрено модуляционное вращение измерительного модуля вокруг оси, перпендикулярной плоскости основания. Коррекция выходных данных гирогоризонткомпаса осуществляется по данным спутниковой навигационной системы. Способ определения навигационных параметров гирогоризонткомпаса основан на использовании сигналов блока акселерометров и волоконно-оптических гироскопов для расчета матрицы направляющих косинусов. При этом предусмотрен автоматический переход в режим работы, при котором вертикаль находится в невозмущенном и недемпфированном режимах, а компасная линия - в режиме гироазимута. 4 ил.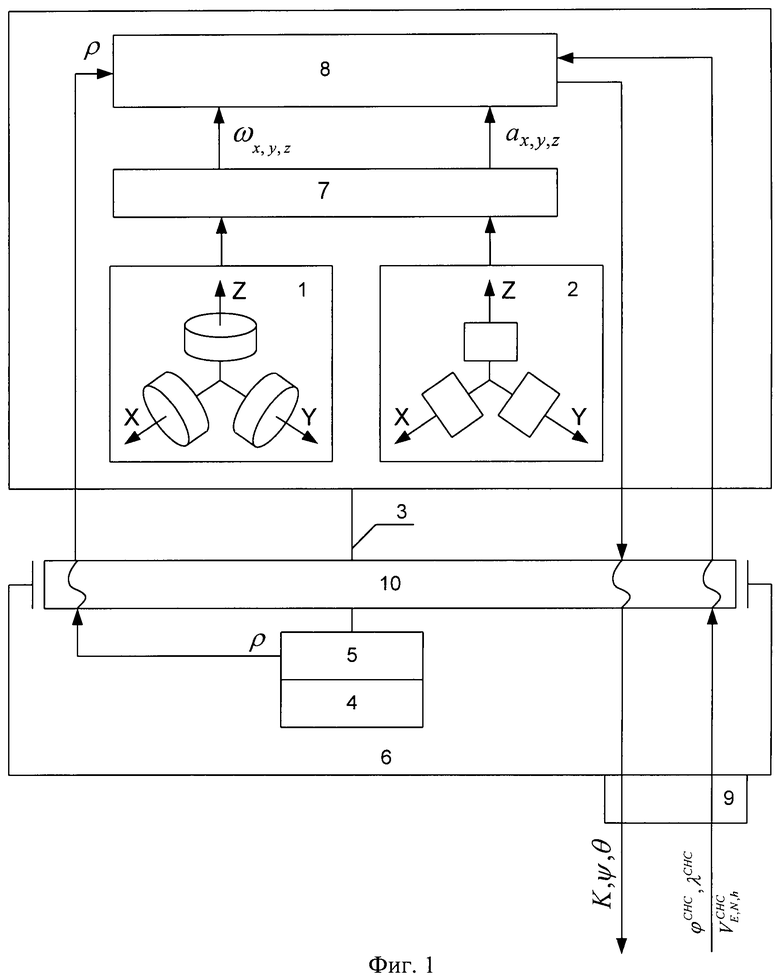
Гирогоризонткомпас, состоящий из инерциального измерительного модуля, выполненного в виде триады волоконно-оптических гироскопов и триады акселерометров, установленного на вращающемся валу, при этом измерительные оси гироскопов и акселерометров взаимно ортогональны и параллельны, ротора моментного двигателя и ротора датчика угла поворота вала, установленных на вращающемся валу, а также расположенных в корпусе прибора статора моментного двигателя и электрического преобразователя датчика угла поворота вала, бортового вычислителя, установленного на вращающемся валу, содержащего блок выработки параметров ориентации, блок преобразования кажущихся ускорений, блок выработки параметров поступательного движения, контур построения вертикали, блок построения курсового канала, при этом входы бортового вычислителя соединены посредством аналого-цифрового преобразователя с выходами триады волоконно-оптических гироскопов и триады акселерометров, а выходы бортового вычислителя соединены с выходными разъемами прибора, расположенными в корпусе, посредством скользящего кругового токоподвода, отличающийся тем, что бортовой вычислитель дополнительно содержит блок управления режимами, при маневрировании объекта или при кратковременном пропадании сигналов внешней информации от спутниковых навигационных систем, осуществляющий автоматический переход устройства в режим работы, при котором контур построения вертикали работает в невозмущаемом и недемпфированном режиме с периодом Шулера, а блок построения курсового канала работает в режиме гироазимута.
| ИГНАТЬЕВ С.В | |||
| Гирогоризонткомпас на волоконно-оптических гироскопах с вращением блока чувствительных элементов | |||
| Навигация и управление движением | |||
| Сб | |||
| докладов IV конференции молодых ученых | |||
| - СПб.: ГНЦ РФ - ЦНИИ «Электроприбор», 2002, с.291-298 | |||
| Интегрированные системы ориентации и навигации для морских подвижных объектов | |||
| АНУЧИН О.Н., |

