Изобретение относится к области навигационного приборостроения морских подвижных объектов.
Одной из проблем на пути создания малогабаритной интегрированной системы ориентации и навигации (ИСОН) для морских объектов на базе бескарданного инерциального измерительного модуля (БИИМ), содержащего измерительный блок (ИБ) низкого уровня точности (например, на микромеханических гироскопах (ММГ), нестабильность дрейфов которых составляет 0,01%) и приемную аппаратуру спутниковых навигационных систем (ПА СНС), является проблема обеспечения требований по точности выработки курса. Так, для обеспечения навигационной безопасности плавания морских судов требования по курсу составляют: ±0.75° sec φ - установившаяся погрешность для неподвижного основания и ±(2…3)° - при маневрировании в широтах φ≤60° (согласно резолюции ИМО А.424(Х1) от 15.11.1979 и А.821 (ХIХ) от 23.11.1995 для гирокомпасов).
Проблему обеспечения требований по курсу в ИСОН с БИИМ низкого уровня точности в последнее время пытаются решить, в частности, за счет создания для подвижных объектов ПА СНС с фазовыми измерениями и разнесенными антеннами.
Способы определения параметров ориентации объекта, основанные на использовании в ПА СНС фазовых измерений с разнесенных на объекте антенн, приведены в заявке РФ №98118543 на выдачу патента на изобретение; патентах РФ №2215299; №2276384.
Известна интегрированная система Seapath 200 норвежской фирмы Seatex AS для морских судов, которая использует мультиантенную ПА СНС с фазовыми измерениями на несущей частоте ([http://www.km.kongsberg.com]).
Из отечественных разработок следует выделить аналогичную мультиантенную ПА СНС МРК-32, использующую фазовые измерения (разработка Красноярского государственного технического университета и НИИ радиотехники [http://www.krtz.su]).
Известны схемы построения ИСОН, например, описанные в:
- ([http://www.km.kongsberg.com]);
- Интегрированная инерциально-спутниковая система ориентации и навигации с разнесенными антеннами // Сб.: Интегрированные инерциально-спутниковые системы навигации // СПб: изд-во ФГУП ЦНИИ «Электроприбор», 2001, С.222-229;
- Интегрированная система спутниковой и инерциальной навигации: экспериментальные результаты и применение к управлению мобильными роботами// Гироскопия и навигация, 2007, №1(56), С.16-28.
В качестве ближайшего аналога (прототипа) предлагаемой ИСОН принимается система, описанная в ([http://www.km.kongsberg.com]).
В этих системах используется мультиантенная ПА СНС с фазовыми измерениями, обеспечивающая с определенной дискретностью автономную выработку параметров ориентации объекта в течение всего времени движения объекта (плавания судна).
Определение параметров ориентации объекта ПА СНС с использованием фазовых измерений, как известно, требует решения проблемы их неоднозначности в условиях движения объекта [Степанов О.А., Кошаев Д.А. Исследование методов решения задачи ориентации с использованием спутниковых систем // Гироскопия и навигация, 1999, №2(25), С.30-55]. Однако решение данной задачи не всегда обеспечивается в условиях маневрирования судна и наличия помех.
Перечень фигур и чертежей
На фигуре 1 изображена структурная схема предлагаемой ИСОН. Фигуры 2а-2г и 3а-3в иллюстрируют результаты оценки точности ИСОН путем решения задачи моделирования ИСОН по данным, имитирующим показания чувствительных элементов ИСОН, спутниковой аппаратуры, лага, и по реальным данным ходовых испытаний на автомобиле инерциального модуля.
На фигуре 1 приняты следующие обозначения:
1 - модуль приемников сигналов спутниковых навигационных систем;
2 - ИБ на ММД и магнитометрах, входящий в состав БИИМ;
3 - вычислитель БИИМ;
4 - вычислительный модуль интегрированной системы;
5 - приемник дифференциальных поправок (Differential Global Positioning System, DGPS);
6 - измеритель относительной скорости судна (лаг);
7 - высокоточный волоконно-оптический гироскоп (ВОГ), входящий в состав БИИМ;
ММГ - микромеханический гироскоп;
К - курс от инерциального модуля;
Kmk - курс магнитный;
ψ,θ - углы качки;
∇h - вертикальные перемещения судна;



GPS - спутниковая глобальная система позиционирования.
Цифрами в скобках обозначены соответствующие входы и выходы блоков.
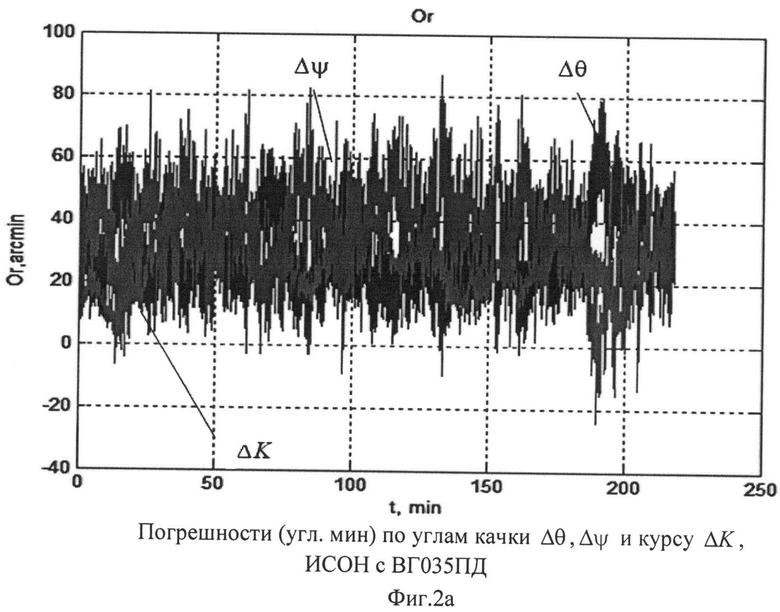
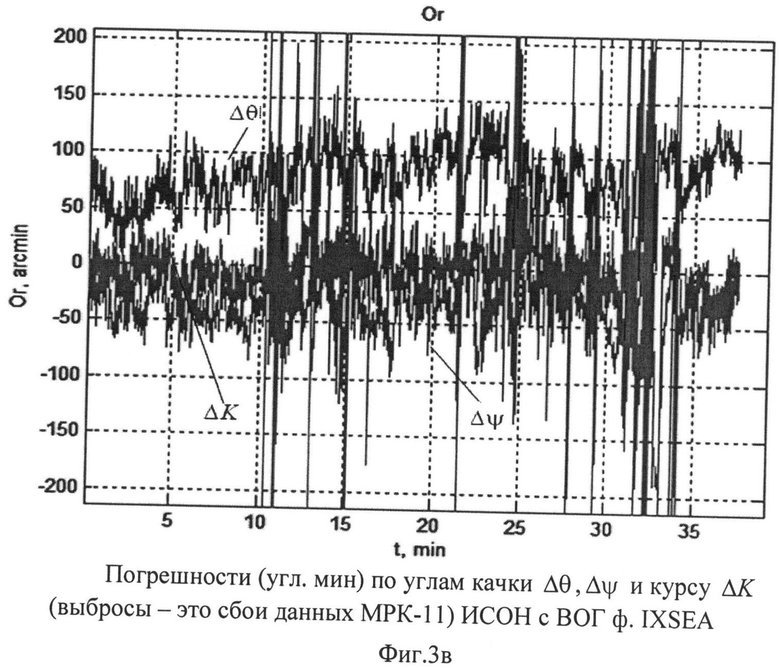
На фигурах 2а-2г и 3а-3в приняты следующие обозначения:
ΔК, Δψ, Δθ - погрешности ИСОН по курсу и углам качки;







К недостаткам принятой за прототип схемы построения ИСОН следует отнести необходимость одновременного и непрерывного наблюдения в течение всего времени плавания судна группировки навигационных спутников (НСi, i - индекс спутника) с целью разрешения проблемы неоднозначности фазовых измерений. Невыполнение данного требования в условиях маневрирования судна приводит к сбоям в выходных данных ПА СНС и, следовательно, к существенным погрешностям ИСОН по курсу.
Задачей изобретения является повышение точности и помехоустойчивости ИСОН, содержащей БИИМ с измерительным блоком на «грубых» датчиках типа ММГ и микромеханических акселерометрах (ММА) и блоке магнитометров, а также ПА СНС с фазовыми измерениями и разнесенными на соответствующей базе антеннами, в выработке курса объекта.
Поставленная задача решается тем, что:
- в БИИМ, содержащий ИБ на микромеханических датчиках и магнитометрах (ИБ на ММД и магнитометрах) (оси: хb, yb, zb; при этом ось zb - ортогональна плоскости палубы), по оси zb дополнительно вводится гироскоп навигационного класса - датчик угловой скорости, например, ВОГ;
- БИИМ кроме параметров ориентации (курс и углы качки) осуществляет дополнительно выработку составляющих вектора линейной скорости и координат места объекта;
- в вычислительный модуль системы дополнительно поступают данные от судового лага для формирования совместно с данными от блока магнитометров соответствующих разностных измерений (см. формулы 2, 6) и их обработки с целью реализации автономного режима работы ИСОН;
- данные встроенных в корпусе БИИМ двух плат приемников СНС используются при начальном запуске ИСОН в течение порядка 5…10 мин с целью определения начального значения курса судна и калибровки ВОГ, а также периодически в процессе эксплуатации при движении судна с постоянным курсом и видимости навигационных спутников используется информация от приемников СНС. Следует заметить, что всегда имеется возможность, например, в условиях ледовой обстановки (когда лаг функционирует неэффективно) или при отсутствии на данном судне информационной связи ИСОН с лагом, привлечь вместо данных лага данные СНС по скорости.
Предлагаемая структура ИСОН (см. фиг.1) включает:
- БИИМ, содержащий измерительный блок 2 (ИБ на ММД и магнитометрах), ВОГ навигационного класса с измерительной осью, ортогональной плоскости палубы (блок 7), вычислитель БИИМ (блок 3);
1 - приемники СНС с фазовыми измерениями и разнесенными на соответствующей базе антеннами;
4 - вычислительный модуль интегрированной системы, входы которого соединены с выходами БИИМ по курсу и курсу магнитному, углам качки, по составляющим вектора линейной скорости и координатам места, а также с выходами приемников СНС 1 по навигационным параметрам и фазе несущей сигналов, принимаемых от навигационных спутников. Кроме того, вычислительный модуль 4 интегрированной системы имеет дополнительный вход для приема данных от судового лага 6. На выходе вычислительного модуля 4 формируются оценки погрешностей БИИМ по курсу, курсу магнитному, углам качки, скорости, координатам места, а также дрейфам ММГ и ВОГ для использования их в обратной связи с целью коррекции БИИМ.
Отличие предлагаемой схемы ИСОН от прототипа заключается:
- во введении в состав БИИМ ВОГ навигационного класса точности с измерительной осью, ортогональной плоскости палубы (блок 7);
- в выработке БИИМ дополнительно составляющих вектора линейной скорости, координат места объекта и подачи их на вход вычислительного модуля интегрированной системы 4;
- в наличии у вычислительного модуля интегрированной системы (блок 4) дополнительного входа для приема данных судового лага (блок 6);
- в оценке погрешностей БИИМ по составляющим вектора линейной скорости, а также дрейфам ММГ и ВОГ и использовании их в обратной связи с целью коррекции БИИМ;
- в использовании данных модуля приемников СНС 1 с фазовыми измерениями и разнесенными на соответствующей базе антеннами, предназначенных для выработки курса судна только для начальной выставки БИИМ по курсу в течение нескольких минут и периодически в море при движении постоянным курсом и отсутствии помех.
Алгоритмическое обеспечение вычислителя БИИМ 3 и вычислительного модуля системы 4 практически аналогично алгоритмам работы соответствующих блоков прототипа. Отличие блока 3 от прототипа заключается в обработке дополнительных данных ВОГ 7. Отличие вычислительного модуля интегрированной системы 4 от аналогичного блока в прототипе заключается в обработке дополнительных разностных измерений, формируемых с использованием данных лага 6, которые поступают на вход вычислительного модуля 4 в автономном режиме работы интегрированной системы.
Сущность предлагаемого решения сводится к следующему.
Известно, что при запуске гирогоризонткомпаса (ГГК) или инерциальной курсовертикали (в авиации) система проходит два режима: режим горизонтирования (построение вертикали места) и режим гирокомпасирования (нахождение плоскости меридиана места). Для этого привлекаются разностные скоростные измерения:

где 

При использовании скорости Vл от лага имеем

Данные измерения можно приближенно представить в виде

где ΔVE,V - погрешности выработки системой составляющих линейной скорости судна; νVi - шумы измерений (при использовании лага включают морские течения, неизмеряемую поперечную составляющую вектора линейной скорости судна и инструментальные погрешности лага); β, γ - погрешности построения вертикали места, содержащие шулеровские колебания и характеризующие погрешности выработки ГГК углов качки (Δψ, Δθ); ΔК - погрешность по курсу; δE, δN - дрейфы инерциального модуля в проекциях на географические оси; R - радиус Земли; ωN - проекция абсолютной скорости вращения навигационного сопровождающего трехгранника с географической ориентацией осей на собственную ось, образуемую при пересечении плоскости меридиана места и плоскости горизонта и направленную на географический север.
Известно, что наличие в измерениях (3) слагаемых, пропорциональных 


Однако в режиме гирокомпасирования начальная погрешность ГГК по курсу списывается только до уровня 




где uα - управление в азимутальном канале, обеспечивающее режим гирокомпасирования.
Согласно приведенному выражению (3) «восточный» дрейф ГГК на фоне начальной погрешности ΔK0 по курсу является ненаблюдаемым, то есть из скоростных измерений 
Обычно данная проблема решается следующим образом:
- в составе ГГК используются достаточно точные гироскопы (0.01…0.03°/ч), чтобы исключить необходимость калибровки «восточного» дрейфа при запуске системы. Однако использование точных гироскопов приводит к существенной стоимости системы;
- при использовании в ГГК менее точных гироскопов (1…3°/ч) применяется модуляционное вращение измерительного блока для компенсации дрейфов гироскопов, что увеличивает массогабаритные характеристики, стоимость и снижает надежность;
- применяются прямые курсовые измерения с использованием мультиантенной ПА СНС для непрерывной коррекции курса в случае применения инерциального модуля на грубых гироскопах типа ММГ, что приводит к снижению уровня безопасности плавания в стесненных водах.
В предлагаемом решении данная проблема разрешается следующим образом:
- в вычислительном модуле интегрированной системы 4 формируются разностные фазовые измерения путем сравнения расчетных 


(данные измерения содержат в основном погрешности решения вычислителем БИИМ 3 задачи ориентации объекта, неоднозначности вторых разностей фазовых измерений, погрешности ориентации базы и шумы измерений);
- разностные скоростные измерения 


- по данным измерительного блока 2, высокоточного ВОГ 7 и вычислителя БИИМ 3 в вычислительном модуле 4 интегрированной системы формируется курсовое измерение

где К, Кmk - курс от инерциального модуля измерительного блока 2 и высокоточного ВОГ 7 и курс магнитный - от МД измерительного блока 2, формируемый по данным магнитометров.
Для условий морского объекта вследствие ограниченности углов качки «восточный» дрейф δE предлагаемой ИСОН будет обусловлен в основном дрейфами ММГ измерительного блока 2 по осям xb, yb, а дрейф δH вокруг вертикальной оси - дрейфом δzb ВОГ 7.
Измерения (5) совместно с измерениями (2) и (6) используются вычислительным модулем 4 интегрированной системы в течение 5…10 мин при запуске системы для оценки и коррекции начальной погрешности ΔK0 по курсу, калибровки дрейфа ВОГ 7 и оценки систематической погрешности ΔКmk (склонения и девиации) магнитного курса магнитометра измерительного блока 2.
В процессе плавания судна измерения (2) и (6) при учете смещения ΔKmk МД, оценка которого ранее была получена с использованием данных СНС в вычислительном модуле 4, обеспечивают устойчивую работу ИСОН в автономном режиме. При этом осуществляется оценка и коррекция погрешности БИИМ по курсу, оценка дрейфов ММГ измерительного блока 2 и ВОГ 7.
Фазовые измерения блока 1 ПА СНС привлекаются периодически в процессе эксплуатации в условиях отсутствия «сбоев» (как правило, при движении судна с постоянным курсом) и видимости навигационных спутников для уточнения смещения ΔKmk курса магнитного от МД измерительного блока 2.
Произведено моделирование на ПК алгоритмов работы ИСОН с оценкой погрешностей при следующих исходных данных:
движение судна:
Vo=20 м/с, K0=40°, Кr=1.5°, Tk=15 с (рысканье); ψ0=3° (дифферент); ψr=3°, Тψ=12 с (килевая качка); θ0=6° (крен); θr=20°, Tψ=10 с (бортовая качка); модель погрешностей ММА:
- нестабильность масштабных коэффициентов линейных акселерометров - случайные величины с уровнем 1%;
- смещение нулей линейных акселерометров - случайные величины с уровнем 0.1 м/с2;
- дрейфы нулей линейных акселерометров - марковские процессы первого порядка σ1ai=0.03 м/с2, µai=1/180 (с-1);
- флуктуационные составляющие погрешностей акселерометров в проекциях на оси ИБ - дискретные белые шумы σ2аi=0.3 м/с2 на частоте 100 Гц;
- неортогональности измерительных осей - 1 угл. мин;
модель погрешностей ММГ:
- нестабильность масштабных коэффициентов - случайные величины с уровнем 1%;
- систематические составляющие дрейфов, которые характеризуют смещение нулей от пуска к пуску - случайные величины с уровнем 300°/ч;
- случайные составляющие дрейфов, которые характеризуют дрейф нуля в пуске - марковские процессы первого порядка σ1gi=100°/ч, µgi=1/180 (с-1);
- флуктуационные составляющие дрейфов - дискретные белые шумы σ2gi=300°/ч; на частоте 100 Гц;
модель погрешностей ВОГ ВГ035ПД (ЗАО «Физоптика»):
- смещение нуля от пуска к пуску - до 10°/ч;
- нестабильность нуля в пуске 0.3…1.0°/ч, Ткор.=180 с (при термокомпенсации);
- шумовая составляющая около 7°/ч на частоте 100 Гц;
- погрешность масштабного коэффициента на уровне 0.1%;
- неортогональность измерительной оси (осям ИБ на ММД) - 1 угл.мин;
погрешности блока магнитометров в выработке курса магнитного:
- смещение нуля - случайная величина с уровнем 5 град.;
- случайная составляющая - марковский процесс первого порядка σ1mk=0.1 град., µgi=1/180 (с-1);
- флуктуационная составляющая - дискретный белый шум σ2mk=5 град. на частоте 100 Гц;
погрешности лага и морские течения:
- инструментальные погрешности лага аппроксимированы дискретными белыми шумами σл=0.1 м/с;
- северная и восточная составляющие скорости течения VTE, VTN - марковские процессы первого порядка σT=0.2…0.3 м/с, µT=1/5400 с-1;
начальные погрешности системы:

ΔVE0=0.1 м/с; ΔVN0=-0.1 м/с; ΔVH0=0.1 м/с;
Δφo=30 м; Δλo=-30 м; Δho=0.5 м;
формирование и обработка в фильтре Калмана вычислительного модуля 4 интегрированной системы фазовых измерений от приемников СНС осуществлялась по слабосвязанной схеме, т.е. по данным СНС предварительно вычислялись текущие значения курса судна.
Расчетная модель погрешностей
С учетом принятых допущений расчетная модель погрешностей ИСОН будет иметь вид

где




Результаты решения модельной задачи (при имитации показаний ВОГ ВГ035ПД) приведены на фиг.2а-2г. Моделирование проводилось при задании следующего режима работы ИСОН: режим гирокомпасирования (10 мин - с использованием GPS), затем автономный режим (с лагом и МД).
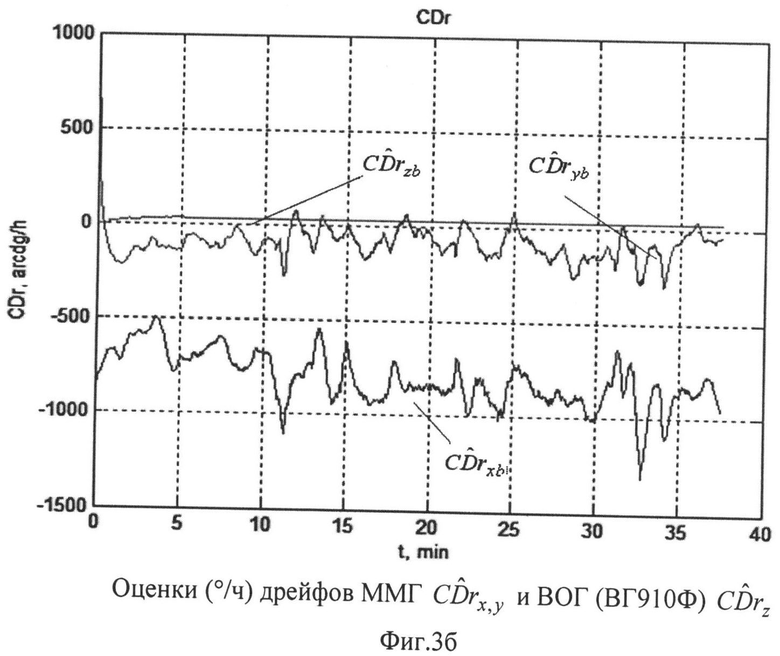
Объектовые испытания
Для оценки точности автономного режима ИСОН привлекались также реальные данные ходовых испытаний на автомобиле инерциального модуля на основе ММД (фирма Analog Devices), ВОГ ВГ910Ф (ЗАО «Физоптика») и ВОГ навигационного класса (фирма IXSEA). Блок магнитометров отсутствовал.
Массивы данных были записаны на частоте 100 Гц.
Данные лага с учетом влияния морских течений имитировались так же, как и при решении модельной задачи.
Обработка массивов данных производилась по дискретным алгоритмам автономного режима работы ИСОН, реализованным в пакете MATLAB (Simulink).
Для эталонирования по курсу и углам качки использовалась спутниковая мультиантенная ПА СНС МРК-32 (разработка Красноярского государственного технического университета и НИИ радиотехники [http://www.krtz.su/]).
Результаты испытаний
Результаты обработки данных испытаний приведены на фиг.3а-3в (решение осуществлялось на ПК в пакете MATLAB (Simulink)). Моделирование проводилось при задании следующего режима работы ИСОН: режим гирокомпасирования (10 мин - с использованием ПА СНС), затем автономный режим с лагом.
Таким образом, предложенное устройство, работающее в автономном режиме, обеспечивает устойчивую выработку курса без использования данных ПА СНС в течение длительных интервалов времени с погрешностью, удовлетворяющей требованиям Морского и Речного Регистров.
Кроме того, нет необходимости в непрерывном использовании мультиантенной ПА СНС для выработки курса судна в процессе его плавания (что характерно для прототипа), что обеспечивает повышение уровня безопасности плавания в стесненных водах (узкостях, прибрежной зоне, в гаванях с интенсивным движением), где возможны частые «сбои» ПА СНС из-за помех при маневрировании.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2015 |
|
RU2633703C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2784859C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |




Изобретение относится к области навигационного приборостроения морских подвижных объектов. Достигаемый технический результат изобретения - повышение точности и помехоустойчивости системы. Указанный результат достигается тем, что заявленная система содержит бескарданный инерциальный измерительный модуль (БИИМ) с измерительным блоком на инерциальных датчиках (микромеханических гироскопах, акселерометрах низкой точности) и магнитометрах, а также приемную аппаратуру спутниковой навигационной системы (ПА СНС) с фазовыми измерениями и разнесенными на соответствующей базе антеннами при выработке курса объекта. При этом в измерительный блок БИИМ дополнительно включают волоконно-оптический гироскоп навигационного класса точности с измерительной осью, ортогональной плоскости палубы, причем БИИМ, кроме параметров ориентации (курс и углы качки), осуществляет дополнительно выработку составляющих вектора линейной скорости и координат места объекта. В вычислительный модуль системы дополнительно поступают данные от судового лага для формирования совместно с данными от блока магнитометров соответствующих разностных измерений и их обработки с целью реализации автономного режима работы системы; при этом в вычислительном модуле системы дополнительно осуществляют оценку погрешностей БИИМ по составляющим вектора линейной скорости, а также оценку дрейфов микромеханических гироскопов и волоконно-оптических гироскопов (ВОГ) и их подачу по обратной связи в БИИМ для коррекции.8 ил.
Интегрированная инерциально-спутниковая система ориентации и навигации для морских объектов, содержащая модуль приемников сигналов спутниковых навигационных систем (СНС) с разнесенными на соответствующих базах антеннами, модуль приема дифференциальных поправок по навигационным параметрам, вычислительный модуль интегрированной системы и бескарданный инерциальный измерительный модуль (БИИМ), состоящий из измерительного блока на «грубых» микромеханических гироскопах и акселерометрах, блока магнитометров и вычислителя БИИМ, при этом третий выход модуля приемников сигналов СНС соединен со входом измерительного блока и вторым входом вычислительного модуля интегрированной системы, выход измерительного блока соединен с первым входом вычислителя БИИМ, первый вход вычислительного модуля интегрированной системы соединен с первым выходом вычислителя БИИМ по курсу и углам качки, третий его вход соединен со вторым выходом модуля приемников сигналов СНС по измеренной фазе несущей сигналов от навигационных спутников, четвертый его вход соединен с первым выходом модуля приемников сигналов СНС по навигационным параметрам, пятый вход соединен с приемником дифференциальных поправок по навигационным параметрам, первый и второй выходы вычислительного модуля интегрированной системы по координатам и скорости, а также первый и второй выходы вычислительного модуля БИИМ по курсу, углам качки и вертикальным перемещениям соединены с интерфейсами потребителей, при этом третий и четвертый выходы вычислительного модуля интегрированной системы по оценкам погрешностей БИИМ по курсу и углам качки соединены со вторым и третьим входами вычислителя БИИМ, отличающаяся тем, что БИИМ дополнительно содержит волоконно-оптический гироскоп навигационного класса с измерительной осью, ортогональной плоскости палубы объекта, выход которого соединен с четвертым входом вычислителя БИИМ, а в вычислительный модуль интегрированной системы дополнительно введены шестой вход для приема данных судового лага и седьмой вход, который соединен с третьим выходом вычислителя БИИМ по скорости и координатам места, при этом дополнительные пятый и шестой выходы вычислительного модуля интегрированной системы по оценкам дрейфов микромеханических гироскопов и волоконно-оптического гироскопа и оценкам погрешностей БИИМ по координатам и скорости соединены с пятым и шестым входами вычислителя БИИМ.
| RU 98118543 A, 20.08.2000 | |||
| СПОСОБ ИНТЕГРАЦИИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И САМОИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2386108C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| Прибор для определения угла установки отклонителя в скважине | 1957 |
|
SU109553A1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| US 6760664 B1, 06.07.2004 | |||
| WO 2005081011 A3, 01.09.2005 | |||
| FR 2891048 A1, 23.03.2007 | |||
| US 6252545 B1, 26.06.2001 | |||

