Изобретение относится к области навигационного приборостроения подвижных объектов различного назначения.
Одной из проблем на пути создания малогабаритной интегрированной системы ориентации и навигации (ИСОН) для морских и авиационных объектов на базе бескарданного инерциального измерительного модуля (БИИМ), содержащего измерительный блок (ИБ) низкого уровня точности (например, на микромеханических гироскопах - ММГ, нестабильность дрейфов которых составляет 30…300 град/ч), и приемной аппаратуры (ПА) спутниковых навигационных систем (СНС) является проблема обеспечения требований по точности выработки курса. Так, для обеспечения навигационной безопасности плавания морских судов требования по курсу составляют: ±0.75° secφ - установившаяся погрешность для неподвижного основания и ±(2…3)° - при маневрировании в широтах φ<60° (согласно резолюции ИМО А.424(XI) от 15.11.79 г. и А.821 (ХIХ) от 23.11.1995 г. для гирокомпасов).
Проблему обеспечения требований по курсу в ИСОН с БИИМ низкого уровня точности в последнее время пытаются решить, в частности, за счет создания для подвижных объектов ПА СНС с фазовыми измерениями и разнесенными антеннами.
Способы определения параметров ориентации объекта, основанные на использовании в ПА СНС фазовых измерений с разнесенных на объекте антенн, приведены в описании патентов RU 98118543 A от 20.08.2000; RU 2215299 C2 от 27.10.2003; RU 2276384 C2 от 20.10.2005.
Известна интегрированная система Seapath 200 норвежской фирмы Seatex AS для морских судов, которая использует мультиантенную ПА СНС с фазовыми измерениями на несущей частоте.
Из отечественных разработок следует выделить аналогичную мультиантенную ПА СНС МРК-11, использующую фазовые измерения (разработка Красноярского государственного технического университета и НИИ радиотехники).
В известных схемах построения ИСОН, например, описанных в работах:
- Product Manuals - Seapath 200. Precise Heading, Attitude and Position. Seatex AS, Trondheim, Norway, 1998-05-04;
- Интегрированная инерциально-спутниковая система ориентации и навигации с разнесенными антеннами. Сб. Интегрированные инерциально-спутниковые системы навигации, изд-во ЦНИИ «Электроприбор», СПб., 2001, с.222-229;
- Интегрированная система спутниковой и инерциальной навигации: экспериментальные результаты и применение к управлению мобильными роботами // Гироскопия и навигация. - 2007. - №1 (56), с.16-28;
используется мультиантенная ПА СНС с фазовыми измерениями, обеспечивающая с определенной дискретностью автономную выработку параметров ориентации объекта. Эта задача, как известно, требует решения проблемы неоднозначности фазовых измерений.
Известны различные способы решения данной проблемы (Степанов О.А., Кошаев Д.А. Исследование методов решения задачи ориентации с использованием спутниковых систем // Гироскопия и навигация. - 1999. - №2 (25). - С.30-55). Все они требуют одновременного наблюдения и обработки фазовых измерений от группировки навигационных спутников (HCi), достаточно сложного программного обеспечения и существенной задержки времени.
Совместная обработка данных БИИМ и ПА СНС в рассматриваемых схемах ИСОН производится на уровне параметров ориентации.
Перечень фигур и чертежей
На фигуре 1 приведена блок-схема ИСОН, принимаемая в качестве прототипа (описана в работе Интегрированная система спутниковой и инерциальной навигации: экспериментальные результаты и применение к управлению мобильными роботами // Гироскопия и навигация. - 2007. -№1 (56), с.16-28).
На фигуре 2 изображена структурная схема предлагаемой ИСОН.
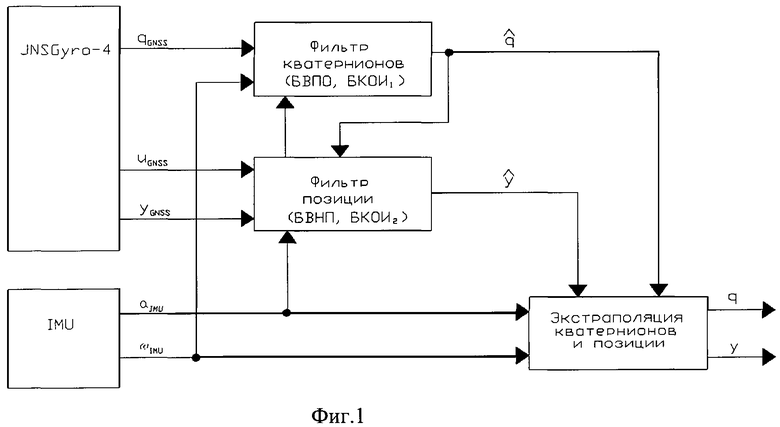
Фигура 3 иллюстрирует интерферометрический принцип формирования фазовых измерений в ПА СНС.
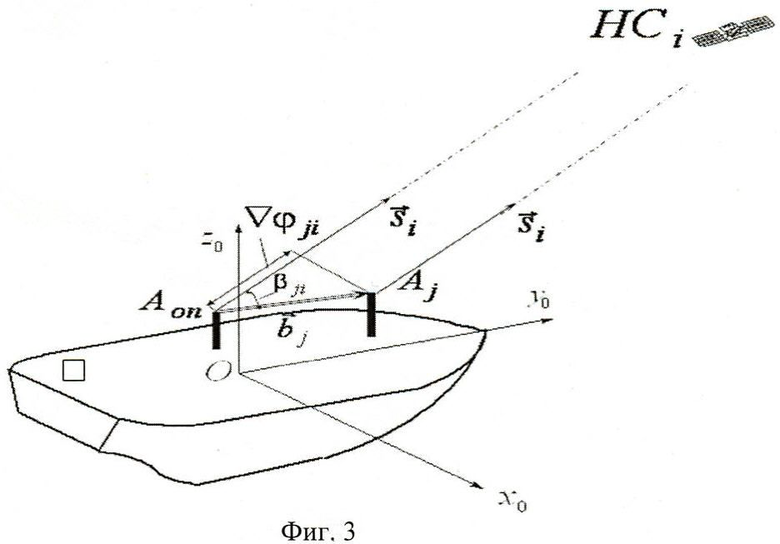
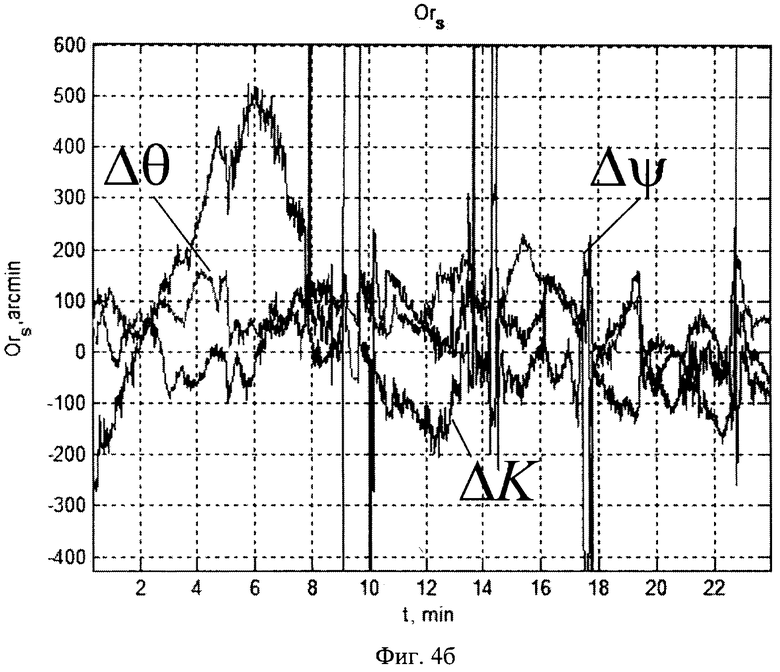
Фигуры 4а-4в иллюстрируют результаты объектовых испытаний экспериментального образца ИСОН, включающей ИБ на ММГ и микромеханических акселерометрах (ММА) - разработки ЦНИИ «Электроприбор», два приемника GPS, разнесенные на базе 2.5 м в продольной плоскости объекта - разработки ОАО «РИРВ».
На фигуре 1 приняты следующие обозначения:
JNSGyro-4 - ПА СНС, содержащая четыре приемника ГЛОНАСС / GPS с разнесенными на соответствующих базах антеннами, на выход которой поступают с частотой 10-20 Гц значения:
- кватерниона поворота объекта относительно сопровождающего горизонтного трехгранника (gGNSS);
- вектора линейной скорости (uGNSS)
- вектора позиции (координат места) в системе WGS - 84 (yGNSS);
IMU - измерительный блок (ИБ) БИИМ, включающий три микромеханических гироскопа и три акселерометра с обеспечивающей электроникой, на выход которого с частотой 100-200 Гц поступают значения вектора угловой скорости (ωIMU) и вектора кажущегося ускорения (a IMU);
блок экстраполяции кватернионов и позиции (дополнительный вычислитель БИИМ) - обеспечивает малую задержку относительно меток времени ПА СНС и высокую частоту выдачи в значениях результирующих кватерниона ориентации (q) и координат места (вектора у);
фильтр кватернионов - содержит блок вычисления параметров ориентации объекта - БВПО и блок комплексной обработки информации - БКОИ1;
фильтр позиции - содержит блок вычисления навигационных параметров объекта
- БВНП и блок комплексной обработки информации - БКОИ2.
На фигуре 2 приняты следующие обозначения:
1 - миниатюрная ПА СНС, содержащая два (или более) спутниковых приемника и две (или более) антенны, разнесенные на соответствующих базах;
2 - бескарданный инерциальный измерительный модуль (БИИМ);
3 - измерительный блок (ИБ) с гироскопами, акселерометрами и обеспечивающей электроникой;
4 - вычислитель БИИМ;
5 - блок вычисления параметров ориентации объекта (БВПО);
6 - блок вычисления навигационных параметров объекта (БВНП);
7 - блок комплексной обработки информации (БКОИ);
8 - дополнительно введенный блок формирования и разрешения неоднозначности разностных фазовых измерений (БФиРНРФИ).
На фигуре 3 приняты следующие обозначения:
Aj - j-я антенна ПА СНС;
Aon - опорная антенна ПА СНС;
x0y0z0 - связанная с объектом система координат;
 - трехмерный вектор, характеризующий отстояние в системе координат x0y0z0
- трехмерный вектор, характеризующий отстояние в системе координат x0y0z0
j - й антенны Aj относительно опорной Aon;
 - направление орта на навигационный спутник (HCi) в точке приема;
- направление орта на навигационный спутник (HCi) в точке приема;
βji - угол между базой и направлением на HCi.
На фигурах 4а-4в приняты следующие обозначения:
Δθ, ΔΨ - погрешности ориентации по углам качки (угл. мин);
ΔК - погрешность ориентации по курсу (угл. мин).
Совместная обработка данных БИИМ и ПА СНС позволяет получить более гладкие и надежные координаты места (позицию объекта) и параметры ориентации, чем каждый из двух источников в отдельности.
В вычислителе БИИМ осуществляются решение задачи ориентации и навигации объекта и с использованием алгоритмов фильтра Калмана - коррекция погрешностей БИИМ.
К недостаткам данной схемы построения ИСОН следует отнести необходимость одновременного и непрерывного наблюдения на некотором интервале времени группировки HCi с целью разрешения проблемы неоднозначности фазовых измерений. Невыполнение данного требования приводит к сбоям в выходных данных ПА СНС. Кроме того, наличие у ПА СНС с фазовыми измерениями влияния геометрического фактора и погрешностей, вызванных многолучевостью принимаемых сигналов, приводит как к неадекватному описанию модели погрешностей ПА СНС в решении задачи ориентации, так и к сбоям выходных данных ПА СНС при маневрировании объекта. Это приводит к дополнительным погрешностям в решении задачи ориентации в рамках ИСОН.
Целью изобретения является повышение точности и помехоустойчивости ИСОН, содержащей БИИМ с ИБ на «грубых» гироскопах типа ММГ и акселерометрах, а также миниатюрную ПА СНС с фазовыми измерениями и разнесенными антеннами, в выработке параметров ориентации объекта.
Поставленная цель в решении данной проблемы достигается тем, что:
- формирование разностных (между БИИМ и ПА СНС) измерений осуществляется на уровне первичных параметров (расчетных и измеренных значений вторых разностей фаз сигналов на несущей частоте, принимаемых в точках размещения на объекте приемных антенн СНС), а их обработка производится индивидуально для каждой пары из наблюдаемых HCi;
- исключение неоднозначности фазовых измерений ПА СНС для каждой пары из наблюдаемых HCi осуществляется с опорой на данные БИИМ;
- размещение ИБ БИИМ и опорной антенны ПА СНС производится на максимально возможном отстоянии от центра масс объекта (их размещение целесообразно производить в одной точке объекта).
Реализация данных условий и представляет собой основное отличие предлагаемого устройства от прототипа, что требует внесения дополнительного блока в вычислитель БИИМ и изменения связей между БИИМ и ПА СНС.
Алгоритмическое обеспечение блоков 5 (БВПО) и 6 (БВНП) (фиг.2) аналогично алгоритмам работы соответствующих блоков прототипа (фиг.1).
Отличие блока 7 (БКОИ) от аналогичных блоков прототипа заключается прежде всего в различии измерений, поступающих на вход блока.
Алгоритмическое обеспечение БКОИ представляет собой реализацию широко используемых алгоритмов фильтра Калмана, аналогичных используемых в прототипе.
В качестве входных данных блока БКОИ для решения задачи калмановской фильтрации используются следующие измерения:
- разность расчетных и измеренных ПА СНС значений первичных навигационных параметров (псевдодальностей и радиальных скоростей для каждого из наблюдаемых HCi);
- разность расчетных и измеренных ПА СНС значений вторых разностей фазовых измерений.
Выходными данными блока БКОИ являются:
- оценки погрешностей угла курса и углов качек объекта;
- оценки погрешностей координат места и составляющих линейной скорости движения объекта;
- оценки дрейфов гироскопов;
- оценки остаточных неоднозначностей фазовых измерений.
Отличием от прототипа является то, что в блок БКОИ от ПА СНС поступают не значения параметров ориентации (кватернион gGNSS), a первичные разности фазовых измерений, из которых предварительно в блоке 8 (БФиРНРФИ) исключены неоднозначности фазовых измерений с точностью до одной длины волны. Кроме того, в блоке БКОИ вырабатываются оценки остаточных неоднозначностей фазовых измерений.
Отличие от прототипа заключается также в том, что дополнительно в состав блока 4 (вычислитель БИИМ) введен блок 8 (БФиРНРФИ), обеспечивающий индивидуально для каждой пары из наблюдаемых НСi формирование и сравнение расчетных (по данным БИИМ о координатах места и параметрах ориентации точки размещения на объекте опорной антенны и данным ПА СНС о координатах HCi) и измеренных значений (по данным ПА СНС) вторых разностей фазовых измерений. При этом в блоке 8 (БФиРНРФИ) по оценкам, поступающим из блока 7 (БКОИ), также осуществляется коррекция неоднозначности измеренных значений вторых разностей фазовых измерений.
Введены связи блока 8 (БФиРНРФИ) с блоком 1 (ПА СНС) и блоками 5 (БВПО), 6 (БВНП) и 7 (БКОИ), обеспечивающие его функционирование.
Отличительным является также то, что размещение ИБ БИИМ и опорной антенны ПА СНС производится на максимально возможном отстоянии от центра масс (ц.м.) объекта (их размещение целесообразно производить в одной точке объекта), что в условиях качки и рыскания объекта приводит к повышению точности выработки параметров ориентации объекта.
Существо предлагаемого решения сводится к следующему.
Интерферометрический принцип формирования фазовых измерений в ПА СНС (фиг.3) предполагает, что сигналы от одного HCi в виде плоской волны поступают на две антенны. Обоснованность предположения о плоском характере волны объясняется значительной удаленностью источника сигнала по сравнению с расстоянием между антеннами (длиной базы -  ).
).
Очевидно, что в единицах дальности полная разность фаз сигналов, принимаемых ПА СНС в точках размещения антенн Ai, Aon (фиг.3), определяется как

где ∇rji - разность дальностей ρji до HCi на базе  , λi - длина волны излучаемого HCi сигнала.
, λi - длина волны излучаемого HCi сигнала.
В общем случае с учетом того факта, что длина базы между антеннами превышает половину длины волны, измерения первой разности фаз от HCi для j баз (что представляет собой измеренное значение направляющего косинуса орта  относительно базы
относительно базы  ) можно представить в виде
) можно представить в виде

где  - погрешность измерения разности псевдодальностей, обусловленная в основном различной нестабильностью опорных генераторов двух приемников СНС, размещенных в точках приема; λi - длина волны сигнала, излучаемого i-м HCi, ηji - целое число длин волн - неоднозначность в фазовых измерениях;
- погрешность измерения разности псевдодальностей, обусловленная в основном различной нестабильностью опорных генераторов двух приемников СНС, размещенных в точках приема; λi - длина волны сигнала, излучаемого i-м HCi, ηji - целое число длин волн - неоднозначность в фазовых измерениях;  - флуктуационная (шумовая) составляющая измерений.
- флуктуационная (шумовая) составляющая измерений.
Соответственно для вторых разностей измеренных значений фазовых измерений (их формирование производится в блоке 1 (ПА СНС) - фиг.2) получим

где  - измеренное значение направляющего косинуса орта
- измеренное значение направляющего косинуса орта  относительно базы
относительно базы  для HCi.
для HCi.
Формирование вторых разностей фазовых измерений необходимо для исключения влияния расхождения шкал времени опорных генераторов приемников СНС в точках размещения антенн Ai, Aon, т.е. для исключения погрешности  из измерений.
из измерений.
Формирование вторых разностей расчетных значений фазовых измерений производится в блоке 8 ((БФиРНРФИ) - фиг.2).
Входными данными блока БФиРНРФИ являются:
- измеренные значения вторых разностей фаз сигналов навигационных спутников от ПА СНС;
- значения координат навигационных спутников от ПА СНС;
- значения координат места и составляющих линейной скорости движения объекта от блока БВНП (БИИМ);
- значения угла курса и углов качки объекта от блока БВПО (БИИМ);
- оценки остаточных неоднозначностей фазовых измерений от блока БКОИ.
Выходными данными блока БФиРНРФИ являются:
- разности расчетных и измеренных значений вторых разностей фаз сигналов навигационных спутников.
Располагая данными о декартовых координатах  , параметрах ориентации (матрице ориентации С0,h_pr(K,Ψ,θ)), точке размещения на объекте опорной Aon антенны (от БИИМ) и известными эфемеридами
, параметрах ориентации (матрице ориентации С0,h_pr(K,Ψ,θ)), точке размещения на объекте опорной Aon антенны (от БИИМ) и известными эфемеридами  HCi (от ПА СНС) в гринвичской системе координат, можно рассчитать направляющие косинусы орта
HCi (от ПА СНС) в гринвичской системе координат, можно рассчитать направляющие косинусы орта  соответственно в гринвичской, географической и связанной с объектом системах координат
соответственно в гринвичской, географической и связанной с объектом системах координат



(где Ce,h_pr(λ, φ) - матрица перехода от гринвичских к географическим осям) и сформировать расчетное значение направляющего косинуса орта  относительно базы
относительно базы  (их формирование производится в блоке 8 (БФиРНРФИ) - фиг.2)
(их формирование производится в блоке 8 (БФиРНРФИ) - фиг.2)

Значения  направляющих косинусов вектора в связанных с объектом осях будут равны
направляющих косинусов вектора в связанных с объектом осях будут равны

где [xAj, yAj, zAj]T,  - декартовые координаты точки расположения антенн Aj, Aon относительно центра масс объекта в связанных осях.
- декартовые координаты точки расположения антенн Aj, Aon относительно центра масс объекта в связанных осях.
Соответственно для вторых разностей расчетных значений фазовых измерений (их формирование производится в блоке 8 (БФиРНРФИ) - фиг.2) получим

Сравнивая расчетные и измеренные значения вторых разностей фазовых измерений, формируются искомые разностные измерения (их формирование также производится в блоке 8 (БФиРНРФИ) - фиг.2)

которые содержат с соответствующими весами в основном погрешности решения БИИМ задачи ориентации объекта (погрешности ΔC0,h_pr - матрицы ориентации, однозначно связанные с погрешностями аналитического построения географического сопровождающего трехгранника: α, β, γ; где α - погрешность по курсу, β, γ - погрешности построения вертикали места), погрешности  ,
,  ориентации базы
ориентации базы  относительно связанных с объектом осей, неоднозначности вторых разностей фазовых измерений
относительно связанных с объектом осей, неоднозначности вторых разностей фазовых измерений  и шумы измерений.
и шумы измерений.
Полагая погрешности БИИМ по навигационным параметрам и параметрам ориентации объекта в пределах малости (например, по курсу - порядка 5°, по углам качки - 3°), допустима линеаризация измерений (10). При этом вклад погрешностей БИИМ в измерения (10) не превышает при длине базы 1…2 м половины длины волны излучаемого HCi сигнала.
Предварительная обработка разностных измерений (10) производится в блоке 8 (БФиРНРФИ) (фиг.2) и заключается в исключении исходной неоднозначности фазовых измерений. Т.к. априори известно, что полезная информация вместе с шумами составляет менее одной длины волны излучаемого HCi сигнала в значениях приведенного измерения  , то исключая целое число (ηi+1-ηi) из значения
, то исключая целое число (ηi+1-ηi) из значения  и оставляя его дробную часть
и оставляя его дробную часть  , тем самым исключается из восстановленных измерений
, тем самым исключается из восстановленных измерений  (с учетом сохранения знака
(с учетом сохранения знака  ) неоднозначность фазовых измерений до уровня
) неоднозначность фазовых измерений до уровня  , где δλi+1=λi+1-λi - различие в длине волны излучаемых HCi сигналов. Остаточная погрешность фазовых измерений в пределах одной длины волны, включающая и «скачкообразную» погрешность от многолучевости принимаемого сигнала, включается в число оцениваемых параметров.
, где δλi+1=λi+1-λi - различие в длине волны излучаемых HCi сигналов. Остаточная погрешность фазовых измерений в пределах одной длины волны, включающая и «скачкообразную» погрешность от многолучевости принимаемого сигнала, включается в число оцениваемых параметров.
Измерения  вместе с известными (Анучин О.Н., Емельянцев Г.И. (под общей ред. акад. РАН В.Г.Пешехонова). Интегрированные системы ориентации и навигации для морских подвижных объектов. - СПб., 2003. С.389) разностными измерениями по навигационным параметрам с выхода блока 8 (БФиРНРФИ) поступают на вход блока 7 (БКОИ) для последующей обработки с использованием алгоритмов фильтра Калмана.
вместе с известными (Анучин О.Н., Емельянцев Г.И. (под общей ред. акад. РАН В.Г.Пешехонова). Интегрированные системы ориентации и навигации для морских подвижных объектов. - СПб., 2003. С.389) разностными измерениями по навигационным параметрам с выхода блока 8 (БФиРНРФИ) поступают на вход блока 7 (БКОИ) для последующей обработки с использованием алгоритмов фильтра Калмана.
Оценки, выработанные в блоке 7 (БКОИ), поступают в обратную связь для коррекции погрешностей БИИМ в выработке параметров ориентации и компенсации погрешностей гироскопов (поступают на один из входов блока 5 (БВПО)), коррекции погрешностей БИИМ в выработке навигационных параметров и погрешностей акселерометров (поступают на один из входов блока 6 (БВНП)), а также коррекции измерений  в части их остаточной неоднозначности и погрешностей ориентации базы
в части их остаточной неоднозначности и погрешностей ориентации базы  относительно связанных с объектом осей (поступают на один из входов блока 8 (БФиРНРФИ)).
относительно связанных с объектом осей (поступают на один из входов блока 8 (БФиРНРФИ)).
Анализ точности предлагаемого решения
Формирование измерений
При разнесении двух антенн ПА СНС в осях объекта номинальные  и приборные
и приборные  значения направляющих косинусов вектора
значения направляющих косинусов вектора  в связанных с объектом осях будут равны
в связанных с объектом осях будут равны
где  , (j=x, y, z) - погрешности орта
, (j=x, y, z) - погрешности орта  . При этом значения
. При этом значения  ,
,  уточнялись по результатам обработки измерений (10), а составляющая
уточнялись по результатам обработки измерений (10), а составляющая  определялась из условия нормирования орта
определялась из условия нормирования орта  , т.е.
, т.е.  .
.
В этом случае линеаризованные разностные измерения (10) могут быть представлены в следующем виде

где
B1j,(j=1, 2, 3) - элементы вектора-строки (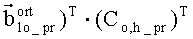 ;
;
Sij, S(i+1)j, (j=E, N, H) и Sij, s(i+1)j, (j=x, y, z) - элементы ортов 
 (направляющие косинусы орта
(направляющие косинусы орта  HCi относительно соответственно географических осей и осей объекта), формируемые согласно соотношениям (4), (5), (6);
HCi относительно соответственно географических осей и осей объекта), формируемые согласно соотношениям (4), (5), (6);
 - остаточные погрешности вторых разностей фазовых измерений для пары спутников HCi+1 и HCi, включающие и «скачкообразную» погрешность от многолучевости принимаемых сигналов;
- остаточные погрешности вторых разностей фазовых измерений для пары спутников HCi+1 и HCi, включающие и «скачкообразную» погрешность от многолучевости принимаемых сигналов;
vzi - шумы измерений, включающие шумы ПА СНС и составляющие, обусловленные погрешностями знания координат места объекта и эфемеридной информации HCi.
Расчетная модель погрешностей
При формировании расчетной модели погрешностей ИСОН использовались следующие аппроксимации:
- смещения нулей гироскопов  (i=xb, yb, zb) и акселерометров
(i=xb, yb, zb) и акселерометров  изменения систематических составляющих погрешностей масштабных коэффициентов ММГ ΔMgi от запуска к запуску и их изменчивость в пуске - были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
изменения систематических составляющих погрешностей масштабных коэффициентов ММГ ΔMgi от запуска к запуску и их изменчивость в пуске - были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
- погрешности δD, δ ПА СНС (смещения соответственно шкалы времени в единицах дальности и частоты опорного генератора в единицах радиальной скорости для опорной антенны в ПА СНС относительно данных HCi) были представлены расчетной моделью
ПА СНС (смещения соответственно шкалы времени в единицах дальности и частоты опорного генератора в единицах радиальной скорости для опорной антенны в ПА СНС относительно данных HCi) были представлены расчетной моделью 
 где коэффициент k2, характеризующий дрейф частоты опорного генератора, был аппроксимирован соответствующим винеровским процессом;
где коэффициент k2, характеризующий дрейф частоты опорного генератора, был аппроксимирован соответствующим винеровским процессом;
- погрешности 
 (j=x, z) были аппроксимированы также соответствующими винеровскими процессами;
(j=x, z) были аппроксимированы также соответствующими винеровскими процессами;
- шумы измерений vzi аппроксимированы дискретными белыми шумами с известными дисперсиями на частоте формирования измерений.
В этом случае расчетная модель погрешностей ИСОН будет иметь вид

где

- вектор состояния системы,
где α, β, γ - погрешности в решении задачи ориентации; ΔVE, ΔVN, ΔVH - погрешности в выработке составляющих вектора относительной линейной скорости объекта в проекциях на географические оси; Δφ, Δλ, Δh - погрешности выработки географических координат места (по широте, долготе и высоте);
Фk+1/k - переходная на шаге Tz формирования измерений матрица состояния системы;
Гk+1≅Фk+1 ·dT - матрица, определяющая влияние вектора входных шумов wk с ковариациями Qk;
Hk+1 - матрица измерений, соответствующая уравнению (12) для вторых разностей фазовых измерений для трех пар HCi и известным (Анучин О.Н., Емельянцев Г.И. (под общей ред. акад. РАН В.Г.Пешехонова). Интегрированные системы ориентации и навигации для морских подвижных объектов. - СПб., 2003. - С.389) разностным скоростным и позиционным измерениям, сформированным по данным БИИМ и ПА СНС;
vk+1 - шумы измерений.
Результаты объектовых испытаний
Испытания экспериментального образца ИСОН (включающей ИБ на ММГ и ММА - разработки ЦНИИ «Электроприбор», два приемника GPS, разнесенные на базе 2.5 м в продольной плоскости объекта - разработки ОАО «РИРВ») производились на автомобиле при его движении в городских условиях. При этом на маршруте движения имели место в ПА СНС частые срывы слежения за HCi и «сбои» в первичных измерениях, обусловленные маневрированием автомобиля и затенением приемных антенн, а также «скачки» в пределах длины волны, обусловленные многолучевостью принимаемых сигналов. Математическое обеспечение ИСОН включало задачу фильтрации по совместной обработке с использованием алгоритмов обобщенного фильтра Калмана данных БИИМ и ПА СНС, содержащую:
- формирование разностных измерений на уровне расчетных и измеренных значений вторых разностей фазовых измерений для каждой пары HCi и их линеаризацию относительно текущих расчетных значений;
- вычисление оценок погрешностей БИИМ в выработке параметров ориентации объекта и их коррекцию в обратной связи на каждом шаге решения задачи фильтрации;
- алгоритмы контроля погрешностей ИСОН в выработке кинематических параметров движения объекта, включающие запись их текущих значений в file.mat и построение графиков погрешностей.
Исходные данные:
- запись массива данных ИБ (текущих значений сигналов ММГ и ММА) БИИМ производилась на частоте 100 Гц;
- формирование откорректированных значений (с учетом поправок на тропосферную и ионосферную задержки, с учетом сдвига шкал времени HCi и ПА СНС) дальностей и приращений дальностей на шаге измерений, а также эфемеридной информации для каждого из 6-ти наблюдаемых HCi осуществлялось на частоте 1 Гц с привязкой всех данных к синхроимпульсу от ПА СНС;
- при «скачках» в разностных фазовых измерениях для пары спутников на величину более 0.1 длины волны производился частичный перезапуск фильтра Калмана по погрешности ΔСf(i+1)-i, соответствующей данному измерению;
- в качестве эталонных данных о курсе объекта использовались значения курса от аппаратуры МРК-11 (разработка Красноярского государственного технического университета и НИИ радиотехники) и значения путевого угла от ПА СНС.
На фиг.4а представлены результаты обработки данных, собранных в ходе проведения испытаний при отсутствии курсовых и фазовых измерений. При этом в качестве эталона сравнения использовались данные о курсе K_gps от МРК-11.
На фиг.4б представлены результаты обработки данных, собранных в ходе проведения испытаний с использованием фазовых измерений. При этом в качестве эталона сравнения использовались данные о курсе K_gps от МРК-11.
На фиг.4в представлены результаты обработки данных, собранных в ходе проведения испытаний с использованием фазовых измерений. При этом в качестве эталона сравнения использовались данные о путевом угле (PU_gps) от ПА СНС.
Из сравнения рисунков фиг.4а и 4б видно, что «выбросы» - это от эталона (МРК-11).
Результаты решения задачи ориентации объекта в предлагаемой схеме построения ИСОН, приведенные на рисунках фиг.4а-4в, подтверждают эффективность данного решения. При этом предлагаемое решение допускает перерывы в поступлении данных от ПА СНС и позволяет эффективно обеспечивать отбраковку недостоверных измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2015 |
|
RU2633703C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| Способы коррекции показаний инерциальной части радиоинерциальной системы навигации | 2023 |
|
RU2840478C2 |

Изобретение относится к области навигационного приборостроения подвижных объектов различного назначения. Технический результат - повышение точности и помехоустойчивости. Для достижения данного результата интегрированная система ориентации и навигации (ИСОН) содержит бескарданный инерциальный измерительный модуль (БИИМ) с измерительным блоком на «грубых» гироскопах и акселерометрах, а также миниатюрную приемную аппаратуру спутниковой навигационной системы (ПА СНС) с фазовыми измерениями и разнесенными антеннами в выработке параметров ориентации объекта. При этом формирование разностных (между БИИМ и ПА СНС) измерений осуществляется на уровне первичных параметров (расчетных и измеренных значений вторых разностей фаз сигналов на несущей частоте, принимаемых в точках размещения на объекте приемных антенн ПА СНС), а их обработка производится индивидуально для каждой пары из наблюдаемых навигационных спутников; размещение измерительного блока БИИМ и опорной антенны ПА СНС производится на максимально возможном расстоянии от центра масс объекта (их размещение целесообразно производить в одной точке объекта). 6 ил.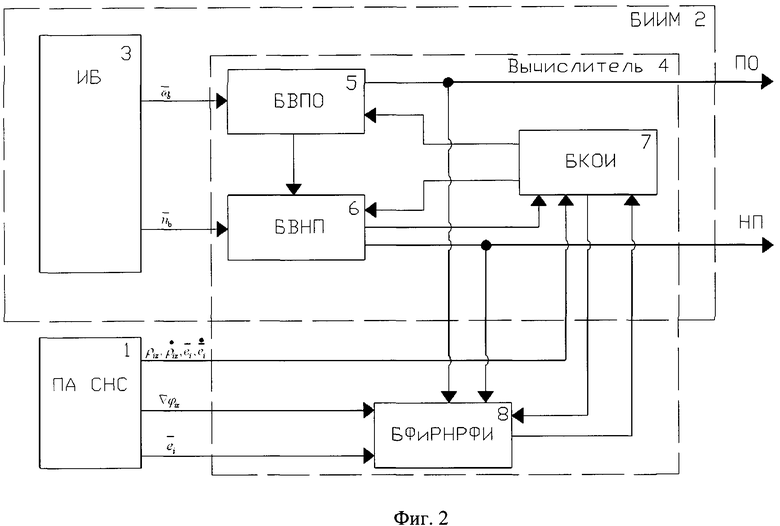
Интегрированная инерциально-спутниковая система ориентации и навигации, содержащая бескарданный инерциальный измерительный модуль (БИИМ), включающий измерительный блок (ИБ) на гироскопах и акселерометрах низкой точности, блок выработки параметров ориентации (БВПО), блок выработки навигационных параметров (БВНП), блок комплексной обработки информации (БКОИ) и приемную аппаратуру спутниковой навигационной системы (ПА СНС), включающую два или несколько приемника ГЛОНАСС/GPS с разнесенными на соответствующих базах антеннами и блок выработки вторых разностей фаз сигналов на несущей частоте, при этом первый выход ИБ по составляющим угловой скорости объекта соединен со входом блока БВПО, второй выход ИБ по составляющим линейного ускорения объекта соединен со входом блока БВНП, первый выход БВПО по углу курса и углам качки объекта соединен со входом блока БВНП, первый выход БВНП по координатам места и составляющим линейной скорости движения объекта соединен со входом блока БКОИ, первый выход которого по оценкам погрешностей угла курса и углов качек объекта, оценкам дрейфов гироскопов соединен со входом блока БВПО, второй выход БКОИ по оценкам погрешностей координат места и составляющим линейной скорости движения объекта соединен со входом блока БВНП, первый выход ПА СНС по измеренным значениям навигационных параметров соединен со входом блока БКОИ, отличающаяся тем, что в состав БИИМ дополнительно введен блок формирования и разрешения неоднозначности разностных фазовых измерений (БФиРНРФИ), первый вход которого соединен со вторым выходом блока ПА СНС по измеренным значениям вторых разностей фаз сигналов навигационных спутников, второй вход соединен с третьим выходом блока ПА СНС по координатам навигационных спутников, третий вход соединен со вторым выходом блока БВНП по координатам места и составляющим линейной скорости движения объекта, четвертый вход соединен со вторым выходом блока БВПО по углу курса и углам качек объекта, пятый вход соединен с третьим выходом блока БКОИ по оценкам остаточных неоднозначностей фазовых измерений, а выход блока БФиРНРФИ по разностным измерениям вторых разностей фаз пар навигационных спутников соединен с одним из входов блока БКОИ, при этом ИБ БИИМ и опорная антенна ПА СНС устанавливаются на максимально возможном отстоянии от центра масс объекта, ограниченном размерами объекта.
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| Применение двухступенчатого субоптимального фильтра при решении задачи позиционирования | |||
| АФЕНКО К.А | |||
| и др | |||
| В кн.: Навигация и управление летательными аппаратами / Труды МИЭА / Под | |||
| ред | |||
| А.Г.Кузнецова, выпуск №2, 2010, с.52-59, рис.7 | |||
| СТЕПАНОВ О.А., КОШАЕВ Д.А | |||
| Исследование методов решения | |||

