Изобретение относится к системам ориентации и навигации подвижных объектов различного типа, в частности к гирогоризонткомпасам (ГГК), в которых используется измерительная информация, получаемая с датчиков угловых скоростей (ДУС) (волоконно-оптических гироскопов (ВОГ) или ДУС иного типа) и с блока акселерометров.
Известен аналитический гирокомпас для квазистатических измерений (патент РФ №2408843), построенный на одном высокоточном гироскопе. В гирокомпасе обеспечивается разворот оси чувствительности (ОЧ) гироскопа при определении азимута, а также развязка движения гироскопа относительно основания при колебаниях на стоянке вследствие перемещения экипажа, ветровых нагрузок и др. за счет закрепления гироскопа на платформе посредством узла крепления, расположенного выше центра тяжести гироскопа.
Недостатком аналитического гирокомпаса для квазистатических измерений является сложность практической реализации системы развязки измерительной части гирокомпаса от угловых движений основания. Жесткие требования функционирования и, соответственно, сложность и низкая надежность устройства связаны с необходимой чувствительностью работы маятникового подвеса, который должен эффективно парировать возникающие угловые перемещения, в том числе сравнительно малые (порядка нескольких угловых секунд). Требование тщательной реализации маятникового подвеса наряду с увеличением сложности приводит к увеличению массы и габаритов устройства. К недостаткам гирокомпаса следует отнести отсутствие информации об угловых движениях ОЧ измеряющего гироскопа, вызванных движением основания вследствие ветровых нагрузок, хождения экипажа и др., что может приводить к значительным ошибкам определения азимута, что снижает точность его определения. Недостатком гирокомпаса является невозможность вычисления азимута во время движения объекта, а также отсутствие возможности определения углов наклонов.
Известный ГГК с вращением инерциального измерительного модуля (патент РФ №2436046) является наиболее близким к заявляемому ГГК и выбран в качестве прототипа. ГКК содержит первый гироскоп, установленный на вращающемся валу, причем с вращающимся валом связано электромеханическое исполнительное устройство, первый и второй акселерометры, второй и третий гироскопы, оси которых взаимно ортогональны и параллельны, бортовой вычислитель, причем входы бортового вычислителя соединены с выходами гироскопов и акселерометров. Бортовой вычислитель содержит блок выработки параметров ориентации, блок преобразования кажущихся ускорений, блок выработки параметров поступательного движения и блок построения вертикали.
Недостатками известного ГГК по патенту №2436046 являются:
- использование скользящего токоподвода неограниченного вращения для передачи информации из вращающегося измерительного модуля, что снижает надежность и уменьшает ресурс устройства;
- использование трех высокоточных ДУС (высокоточных ВОГ) и трех акселерометров, что приводит к усложнению, увеличению массы и габаритов устройства; учитывая, что движение осуществляется по земной поверхности, в большинстве случаев на подвижном объекте отпадает потребность в акселерометре, измеряющем вертикальную составляющую ускорения;
- низкая точность определения азимута при применении в качестве второго и третьего (горизонтальных) гироскопов низкоточных ДУС (ВОГ);
- реализация непрерывного кругового вращения измерительного модуля, включающего триаду высокоточных ВОГ и триаду акселерометров, целиком, что, в свою очередь, приводит к усложнению, увеличению массы и габаритов устройства, снижению его надежности и ресурса за счет постоянной работы устройства вращения и увеличения нагрузки на опоры.
Техническими задачами, на которые направлено заявляемое изобретение, являются повышение точности определения азимута при применении в качестве горизонтальных гироскопов ДУС низкой точности путем обеспечения измерения азимута одним (первым, установленным в исходном положении вертикально, а при определении азимута - горизонтально) высокоточным гироскопом с автокомпенсацией его ошибок за счет фиксированных поворотов двух рам подвеса, повышение надежности и увеличение ресурса путем исключения из состава устройства скользящего токоподвода неограниченного вращения, снижение сложности, массы и габаритов путем снижения требований к точности горизонтальных гироскопов и исключения одного из триады акселерометров (установленного вертикально), снижение сложности, массы и габаритов устройства за счет реализации жесткого закрепления двух из трех гироскопов и двух акселерометров и реализации дискретных кратковременных (на момент определения азимута) поворотов лишь одного из гироскопов.
Поставленная техническая задача решается тем, что в гирогоризонткомпас, включающий установленный на вращающемся валу первый гироскоп, ось чувствительности которого перпендикулярна оси вращающегося вала, первое исполнительное устройство, ротор которого связан с вращающимся валом, первый и второй акселерометры, второй и третий гироскопы, оси которых взаимно ортогональны и параллельны, бортовой вычислитель, содержащий блок выработки углов ориентации, причем входы бортового вычислителя, являющиеся первым, вторым, третьим, четвертым и пятым входами блока выработки углов ориентации, соединены соответственно с выходами первого, второго и третьего гироскопов, выходами первого и второго акселерометров, введены дополнительная рама и второе исполнительное устройство, а в состав бортового вычислителя - блок управления подвесом, блок вычисления и автокомпенсации погрешности определения азимута и управляющее устройство, при этом вращающийся вал с первым гироскопом установлен в дополнительной раме, а оси вращающегося вала и статор первого исполнительного устройства связаны с дополнительной рамой, наружные оси которой установлены в корпусе прибора с образованием двухосного подвеса, причем ротор второго исполнительного устройства связан с наружной осью дополнительной рамы, а статор второго исполнительного устройства и наружные оси дополнительной рамы - с корпусом гирогоризонткомпаса, при этом исполнительные устройства обеспечивают фиксированные углы поворота вращающегося вала и дополнительной рамы подвеса относительно продольной и поперечной осей прибора в положения -90°, 0°, +90° относительно направления, нормального к основанию прибора, причем первый и второй акселерометры, второй и третий гироскопы установлены в корпусе прибора с осями чувствительности, параллельными основанию прибора, выход первого гироскопа дополнительно соединен с первым входом блока вычисления и автокомпенсации погрешности определения азимута, второй вход которого подключен к выходу блока выработки углов ориентации, выход блока вычисления и автокомпенсации погрешности определения азимута соединен с шестым входом блока выработки углов ориентации бортового вычислителя и первым входом блока управления подвесом, третий вход блока вычисления и автокомпенсации погрешности определения азимута соединен с первым выходом блока управления подвесом, седьмой вход блока выработки углов ориентации соединен со вторым выходом блока управления подвесом, входы первого и второго исполнительных устройств подвеса соединены с третьим и четвертым выходами блока управления подвесом, второй вход которого соединен с выходом управляющего устройства бортового вычислителя.
В предлагаемом устройстве блок выработки углов ориентации выполняет функции блока выработки параметров ориентации, блока преобразования кажущихся ускорений, блока выработки параметров поступательного движения, блока построения вертикали прототипа и в частной реализации содержит указанные блоки, причем входы блока выработки параметров ориентации, соединенные с первым, вторым и третьим входами блока выработки углов ориентации, являются входами для сигналов первого, второго и третьего гироскопов, входы блока преобразования кажущихся ускорений, соединенные с четвертым и пятым входами блока выработки углов ориентации, - входами для сигналов акселерометров, первый дополнительный вход блока выработки параметров ориентации, соединенный с шестым входом блока выработки углов ориентации, является входом для сигнала с выхода блока вычисления и автокомпенсации погрешности определения азимута, второй дополнительный вход блока выработки параметров ориентации, соединенный с седьмым входом блока выработки углов ориентации, является входом для сигнала со второго выхода блока управления подвесом, выход блока выработки параметров ориентации, на который подаются сигналы о продольном и поперечном наклонах, является выходом блока выработки углов ориентации для подключения ко второму входу блока вычисления и автокомпенсации погрешности определения азимута.
Изобретение поясняется чертежами, на которых представлены:
фиг.1 - схема предлагаемого ГГК при работе в режиме гирокомпасирования;
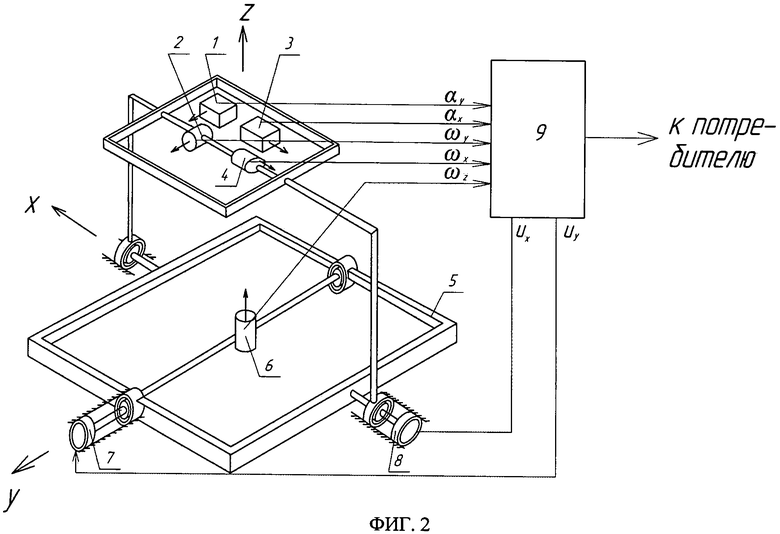
фиг.2 - схема предлагаемого ГГК при работе в режиме хранения направления;
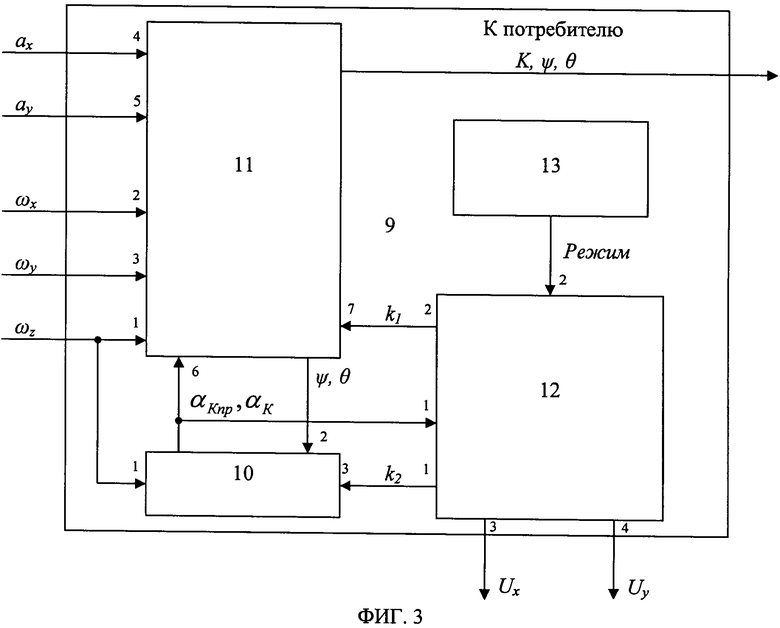
фиг.3 - схема бортового вычислителя;
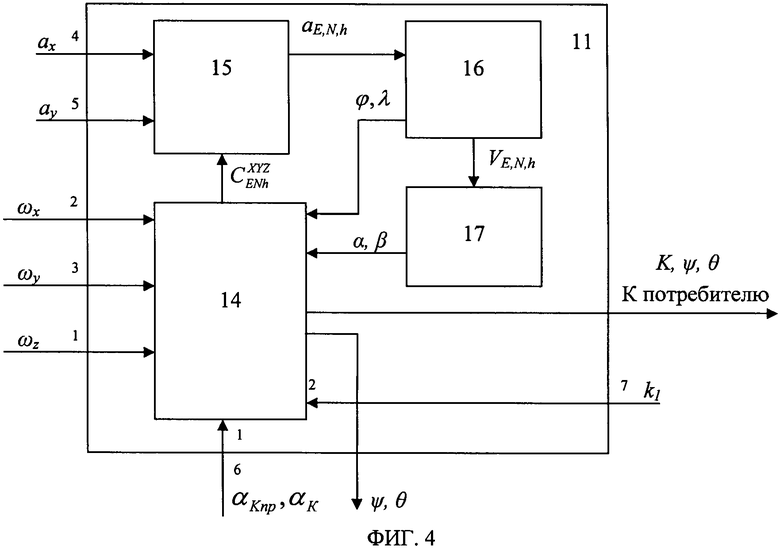
фиг.4 - частная реализация и состав блока выработки углов ориентации бортового вычислителя.
ГГК (фиг.1) содержит двухосный подвес. На вращающемся валу (оси внутренней рамы подвеса) закреплен первый (высокоточный) гироскоп 6. Первый гироскоп 6 установлен таким образом, что его ось чувствительности перпендикулярна оси вращающегося вала. На оси вращающегося вала установлено первое исполнительное устройство 7. Ротор первого исполнительного устройства (электромагнита) 7 связан с вращающимся валом (внутренней рамой подвеса), а статор закреплен на дополнительной (наружной) раме 5 подвеса. Дополнительная рама 5 своими осями установлена в корпусе ГГК. На оси дополнительной рамы 5 подвеса установлено второе исполнительное устройство 8. С осью дополнительной рамы 5 подвеса связан ротор второго исполнительного устройства (электромагнита) 8, статор которого закреплен в корпусе (основании) ГГК. В результате первый (высокоточный) гироскоп 6 может поворачиваться в диапазоне углов ±90° относительно продольной и поперечной осей ГГК относительно направления, нормального к основанию ГГК. В корпусе ГГК установлены два акселерометра 1 и 3, а также второй и третий (низкоточные) гироскопы 2 и 4 таким образом, что ОЧ низкоточных гироскопов и акселерометров находятся в плоскости основания, ОЧ одного низкоточного гироскопа и одного акселерометра расположены по направлению оси наружной рамы подвеса (взаимно параллельно), а ОЧ другого низкоточного гироскопа и другого акселерометра - в перпендикулярном направлении. Сигналы: ωZ - от первого гироскопа 6, ωY, ωX - от второго 2 и третьего 4 гироскопов, a y, a x - от первого 1 и второго 3 акселерометров, поступают в бортовой вычислитель 9. Сигналы управления Ux, Uy из бортового вычислителя 9 поступают на исполнительные устройства 7, 8 подвеса. В бортовом вычислителе 9 сигналы ωZ, ωY, ωX, αy, αx поступают на входы 1, 3, 2, 5, 4 блока выработки углов ориентации 11 (фиг.3). Сигнал ωZ первого гироскопа 6 дополнительно поступает на вход 1 блока вычисления и автокомпенсации погрешности определения азимута 10, с выхода которого вычисленный угол азимута αКпр или αK передается в блок выработки углов ориентации 11, а также в блок управления подвесом 12. Кроме блока выработки углов ориентации 11 и блока управления подвесом 12 бортовой вычислитель 9 содержит управляющее устройство 13. Сигналы о режиме работы ГГК, вырабатываемые управляющим устройством 13, поступают в блок управления подвесом 12, который, в свою очередь, связан с блоком вычисления и автокомпенсации погрешности определения азимута 10 и блоком выработки углов ориентации 11, а также с исполнительными устройствами 7 и 8.
ГКК функционирует следующим образом.
В режиме гирокомпасирования сигнал Режим на выходе управляющего устройства 13 бортового вычислителя 9 устанавливается в состояние «Гирокомпас», по которому блок управления подвесом 12 переключается на работу в режиме определения азимута. С помощью блока управления подвесом 12 выполняется операция определения варианта ориентирования измерительной оси первого гироскопа 6 относительно направления меридиана. Для этого по сигналам управления Ux, Uy первое 7 и второе 8 исполнительные устройства подвеса осуществляют фиксированные повороты вращающегося вала и наружной (дополнительной) рамы 5 подвеса относительно продольной и поперечной осей ГГК в положения - 90° и 0° относительно направления, нормального к его основанию. В результате ОЧ первого гироскопа 6 переводится в плоскость основания ГГК таким образом, чтобы она располагалась вдоль продольной оси ГГК (ось x) и фиксируется в этом положении. От блока управления подвесом 12 в блок выработки углов ориентации 11 поступает сигнал управления k1, по которому информация о курсе K, вырабатываемая блоком выработки углов ориентации 11, «замораживается» (имитируется стоянка подвижного объекта), а по сигналу k2 в блоке вычисления и автокомпенсации погрешности определения азимута 10 производится предварительное измерение угла азимута αКпр в соответствии с выражением:

где ωzo - значение угловой скорости, измеренное первым гироскопом 6 в плоскости основания ГГК, ΩЗ - угловая скорость вращения Земли; φ - широта места, θпр - угол наклона продольной оси объекта (основания ГГК). В качестве угла наклона продольной оси θпр объекта в блоке вычисления и автокомпенсации погрешности определения азимута 10 выбирается угол килевой качки θ (продольный угол наклона), поступающий из блока выработки углов ориентации 11.
Начальное положение ОЧ первого гироскопа 6 для вычисления выражения (1) может быть любым (вдоль положительного или отрицательного направления оси x или y), при этом в качестве угла наклона в зависимости от положения выбирается угол килевой θ (продольный угол наклона) или угол бортовой ψ качки (поперечный угол наклона), а дополнительный угол поворота ОЧ в плоскости основания ГГК учитывается в выражении (1) как добавка, кратная 90°.
Далее по условию близости продольной или поперечной осей ГГК к вычисленному направлению αКпр вектора угловой скорости вращения Земли в блоке управления подвесом 12 выбираются положения ОЧ первого гироскопа 6 (вдоль продольной x или поперечной y осей ГКК) для точного измерения азимута. Первый гироскоп 6 переводится в соответствующее положение в плоскости основания ГТК путем фиксированных разворотов на углы ±90° от вертикального относительно основания ГГК положения ОЧ и фиксации в указанных положениях внутренней и наружной рам подвеса исполнительными устройствами 7, 8.
В соответствии с выражением (1) проводят первый и второй замеры угла азимута, в положениях, отстоящих друг от друга в плоскости основания объекта на 180°, выбирая соответственно угол θ или ψ в качестве продольного наклона (наклона вдоль текущего положения ОЧ первого гироскопа 6). Значения углов θ или ψ определяются соответственно по сигналам a y или a x акселерометров 1 или 3 в блоке выработки углов ориентации 11 в соответствии с алгоритмами прототипа.
При выполнении замеров в режиме гирокомпасирования возможные колебания объекта фиксируются с помощью акселерометров 1,3, второго 2 и третьего 4 гироскопов. Информация о колебаниях объекта (углы килевой θ и бортовой ψ качки) поступает в блок вычисления и автокомпенсации погрешности определения азимута 10, где с использованием указанной информации дополнительно осуществляется компенсация погрешности определения азимута, обусловленная колебаниями объекта.
Замеры, при которых ориентация оси чувствительности первого гироскопа 6 отличается на 180°, по сигналам k2, поступающим от блока управления подвесом 12, обрабатываются в блоке вычисления и автокомпенсации погрешности определения азимута 10 бортового вычислителя 9. На двух противоположных румбах горизонтальная составляющая угловой скорости вращения Земли одинакова по модулю и различается по знаку, а систематический дрейф нуля гироскопа (датчика угловой скорости) неизменен как по модулю, так и по знаку, поэтому при арифметическом вычитании одного показания гироскопа (датчика угловой скорости) из другого горизонтальная составляющая скорости вращения Земли удваивается, а дрейф нуля обнуляется. Результирующее значение угла азимута αК определяется по формуле

где αК1, αК2 - значения курса в первом и втором замерах.
Полученное значение угла азимута αК объекта инвариантно относительно изменения дрейфа нуля первого гироскопа 6. В результате применения указанного алгоритма, при автокомпенсации погрешности исключаются неограниченные круговые вращения средства измерения (первого гироскопа 6) и, соответственно, исключается необходимость применения скользящего токоподвода кругового вращения.
При работе ГГК в режиме хранения направления (фиг.2) сигнал Режим от управляющего устройства 13 бортового вычислителя 9 устанавливается в состояние «Гироазимут», блок управления подвесом 12 переключается на работу в режиме хранения направления. По сигналам блока управления подвесом 12 с помощью первого 7 и второго 8 исполнительных устройств подвеса ОЧ первого гироскопа 6 ориентируется перпендикулярно плоскости основания ГГК и фиксируется в этом положении. По сигналу от блока управления подвесом 12 значение угла курса αК (2) из блока вычисления и автокомпенсации погрешности определения азимута 10 поступает в блок выработки углов ориентации 11, где осуществляется «привязка» вырабатываемого угла курса К к измеренному углу азимута αК, при этом сигнал k1, передаваемый от блока управления подвесом 12 в блок выработки параметров ориентации 11, устанавливается в состояние, разрешающее выработку параметра ориентации подвижного объекта по углу курса К с использованием информации первого гироскопа 6. Угол курса К и углы наклона θ и ψ объекта определяются по известным выражениям алгоритмов работы БИНС [Основы построения бесплатформенных инерциальных навигационных систем /В.В. Матвеев, В.Я. Распопов/ Под общ. ред. д.т.н. В.Я. Распопова. - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009] (без вертикального канала) в бортовом вычислителе 9 по сигналам: ωZ - первого гироскопа 6, a y, a x - первого 1 и второго 3 акселерометров, ωY, ωX - второго 2 и третьего 4 гироскопов. Ввиду того что углы наклона наземного объекта ограничены, дополнительная ошибка из-за отсутствия третьего акселерометра и от второго 2 и третьего 4 (низкоточных) гироскопов при выработке угла курса К при движении носит незначительный характер.
Указанное связано с тем, что, хотя на точность хранения направления оказывают влияние погрешности всех чувствительных элементов (в частности, уходы второго 2 и третьего 4 (горизонтальных) гироскопов ГТК оказывают существенное влияние на точность выработки азимутального угла ориентации (угла азимута), особенно при значительной величине наклонов), специфика эксплуатации наземных подвижных объектов предусматривает ограничение их углов наклонов. Максимальные углы наклонов при движении наземной техники, исходя из условий опрокидывания, обычно составляют 35°, а в среднем при нормальном режиме движения не превышают 12°. Аналогичное относится к остановке транспортного средства, при которой обычно выполняется гирокомпасирование: углы наклонов стремятся ограничить в диапазоне от 5° до 8°. Оценки показывают, что в указанных условиях требования к точности гироскопов, в частности, к горизонтальным гироскопам ГГК (БИНС) (т.е. гироскопам, сигналы которых предпочтительно используются для выработки углов наклонов), могут быть существенно снижены. Без ухудшения точности работы ГГК в режиме хранения направления точность второго 2 и третьего 4 гироскопов может быть приблизительно в 5 раз хуже точности гироскопа, используемого для хранения направления, и еще более существенно хуже точности гироскопа, сигналы которого используются для измерения азимута (т.е. первого гироскопа 6). В связи с этим появляется возможность применения более дешевых чувствительных элементов в составе ГГК.
Дополнительным фактором снижения стоимости при сохранении точности работы является реализация устройства таким образом, чтобы функции разнесенных во времени режимов гирокомпасирования (на стоянке) и хранения направления (в движении) выполнялись одним и тем же высокоточным чувствительным элементом, что реализуется предлагаемым устройством.
Учитывая, что движение всегда осуществляется по земной поверхности, в большинстве случаев для средства ориентирования наземного подвижного объекта при условии, что максимальные углы наклонов ограничены, отпадает потребность в акселерометре, измеряющем вертикальную составляющую ускорения. При этом дополнительные погрешности определения углов наклонов θ и ψ при ограничении максимальных углов наклонов также ограничены.
В предлагаемом ГГК в качестве первого гироскопа 6 может быть применен высокоточный ВОГ или кольцевой лазерный гироскоп, второго и третьего гироскопов 2 и 4 - ВОГ, твердотельный волновой или микромеханический гироскопы, акселерометров 1, 3 - механические маятниковые, на базе микроэлектромеханической системы (МЭМС) и другие типы акселерометров. Функции исполнительных устройств (электромагнитов) 7, 8 могут выполнять электромеханические устройства, обеспечивающие фиксированные повороты исполнительной оси в положения -90°, 0° +90° относительно исходного положения. Бортовой вычислитель 9 может представлять собой устройство на базе микропроцессора или микроконтроллера с аналого-цифровыми преобразователями (АЦП) и цифроаналоговыми преобразователями (ЦАП), если гироскопы 2, 4, 6, акселерометры 1, 3, исполнительные устройства 7, 8 работают с аналоговыми сигналами. Блок выработки углов ориентации 11, блок управления подвесом 12, блок вычисления и автокомпенсации погрешности определения азимута 10 и управляющее устройство 13 представляют собой арифметико-логические и программные устройства, выполненные на базе микропроцессора или микроконтроллера.
В частной реализации блок выработки углов ориентации 11 ГГК содержит (фиг.4): блок выработки параметров ориентации 14, блок преобразования кажущихся ускорений 15, блок выработки параметров поступательного движения 16, блок построения вертикали 17, причем входы блока выработки параметров ориентации 14, соединенные с первым, вторым и третьим входами блока выработки углов ориентации 11, являются входами для сигналов гироскопов 6, 2, 4, входы блока преобразования кажущихся ускорений 15, соединенные с четвертым и пятым входами блока выработки углов ориентации 11, - входами для сигналов акселерометров 1, 3, первый дополнительный вход блока выработки параметров ориентации 14, соединенный с шестым входом блока выработки углов ориентации 11, является входом для сигнала с выхода блока вычисления и автокомпенсации погрешности определения азимута 10, второй дополнительный вход блока выработки параметров ориентации 14, соединенный с седьмым входом блока выработки углов ориентации 11, является входом для сигнала со второго выхода блока управления подвесом 12, выход блока выработки параметров ориентации 14, на который подаются сигналы о продольном и поперечном наклонах θ и ψ, является выходом для подключения ко второму входу блока вычисления и автокомпенсации погрешности определения азимута 10, причем a
E, a
N, a
h - линейные ускорения объекта в проекции на оси географической системы координат,  - матрица перехода от связанной с прибором системы координат к географической системе координат, VE, VN, Vh - линейные скорости объекта в проекции на оси географической системы координат, α, β - погрешности построения вертикали места; φ, λ - координаты места, вырабатываемые прибором.
- матрица перехода от связанной с прибором системы координат к географической системе координат, VE, VN, Vh - линейные скорости объекта в проекции на оси географической системы координат, α, β - погрешности построения вертикали места; φ, λ - координаты места, вырабатываемые прибором.
В целом, благодаря предложенной кинематической схеме, набору чувствительных, микропроцессорных и силовых исполнительных элементов (электромагнитов) предлагаемым устройством обеспечиваются:
- повышение точности измерения азимута путем использования высокоточного гироскопа с компенсацией систематической составляющей ошибки (ОЧ которого при измерениях ориентируется в плоскости основания ГГК в четырех различных положениях);
- возможность компенсации погрешности самоориентирования, обусловленной колебаниями объекта от ветровых нагрузок, хождения экипажа и др. по сигналам канала построения вертикали на втором и третьем гироскопах и акселерометрах;
- режим хранения азимутального угла с помощью высокоточного гироскопа при движении объекта (ОЧ которого ориентируется по вертикали места (перпендикулярно основанию объекта));
- определение углов наклона объекта на стоянке и при движении объекта;
- повышение надежности, увеличение ресурса, упрощение конструкции, снижение массы и габаритов.
При этом конструкция ГГК не содержит систем стабилизации и горизонтирования, датчиков углового положения рам подвеса, характерных для платформенных гиросистем, позволяет вместо нескольких использовать один высокоточный гироскоп и снизить требования к точности гироскопов, сигналы которых используются для определения углов наклонов.
Проведены экспериментальные исследования и моделирование работы ГГК, подтверждающие улучшение характеристик устройства. Так при реализации предлагаемого ГГК, в составе которого в качестве первого гироскопа 6 применяется высокоточный ВОГ фирмы «Оптолинк» ОИУС-1000 со случайным дрейфом 0.01°/ч, массой 1 кг, габаритными размерами 150 мм, относительной стоимостью 2.6, а в качестве второго и третьего гироскопов - среднеточные ВОГ ОИУС-200 той же фирмы со случайным дрейфом 0.2°/ч, массой 0.22 кг, габаритными размерами 70 мм и относительной стоимостью 1.0, акселерометры АК-15-2 с относительной стоимостью 0.52, точность определения азимута достигает 0.07°·sec(широты) в рабочем диапазоне температур. Для устройства-прототипа в указанном составе чувствительных элементов точность определения азимута не превышает 0.76°·sec(широты) в рабочем диапазоне температур. При этом точность определения азимута 0.07°·sec(широты) в устройстве прототипе может быть получена при условии применения триады ОИУС-1000 и акселерометров с соответствующим увеличением стоимости, массы и габаритов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2571199C1 |
| ГИРОГОРИЗОНТКОМПАС | 2016 |
|
RU2617136C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| АВТОНОМНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2015 |
|
RU2578247C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2610022C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| НАЗЕМНАЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 2002 |
|
RU2213937C1 |
Изобретение относится к области приборостроения и может найти применение в системах ориентации и навигации подвижных объектов. Для этого гирогоризонткомпас (ГГК) содержит первый гироскоп, дополнительную раму, первое и второе исполнительные устройства, роторы которых соответственно связаны с вращающимся валом и осью дополнительной рамы, а статоры с дополнительной рамой и корпусом ГГК, первый и второй акселерометры, второй и третий гироскопы, установленные на корпусе ГГК, оси которых взаимно ортогональны и параллельны, бортовой вычислитель, содержащий блок выработки углов ориентации, блок управления подвесом, блок вычисления и автокомпенсации погрешности определения азимута и управляющее устройство. Исполнительные устройства обеспечивают фиксированные повороты вращающегося вала и дополнительной рамы подвеса относительно продольной и поперечной осей ГГК в положения -90°, 0°, +90° относительно направления, нормального к основанию ГГК. 1 з.п. ф-лы, 4 ил.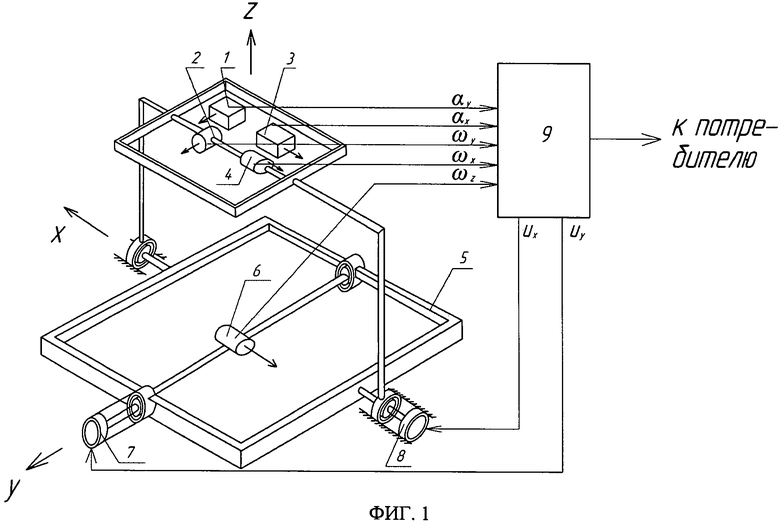
1. Гирогоризонткомпас, включающий установленный на вращающемся валу первый гироскоп, ось чувствительности которого перпендикулярна к оси вращающегося вала, первое исполнительное устройство, ротор которого связан с вращающимся валом, первый и второй акселерометры, второй и третий гироскопы, оси которых взаимно ортогональны и параллельны, бортовой вычислитель, содержащий блок выработки углов ориентации, причем входы бортового вычислителя, являющиеся первым, вторым, третьим, четвертым и пятым входами блока выработки углов ориентации, соединены соответственно с выходами первого, второго и третьего гироскопов, выходами первого и второго акселерометров, отличающийся тем, что в него введены дополнительная рама и второе исполнительное устройство, а в состав бортового вычислителя - блок управления подвесом, блок вычисления и автокомпенсации погрешности определения азимута и управляющее устройство, при этом вращающийся вал с первым гироскопом установлен в дополнительной раме, а оси вращающегося вала и статор первого исполнительного устройства связаны с дополнительной рамой, наружные оси которой установлены в корпусе гирогоризонткомпаса с образованием двухосного подвеса, причем ротор второго исполнительного устройства связан с наружной осью дополнительной рамы, а статор второго исполнительного устройства и наружные оси дополнительной рамы - с корпусом гирогоризонткомпаса, при этом исполнительные устройства обеспечивают фиксированные углы поворота вращающегося вала и дополнительной рамы подвеса относительно продольной и поперечной осей гирогоризонткомпаса в положения -90°, 0°, +90° относительно направления, нормального к основанию гирогоризонткомпаса, причем первый и второй акселерометры, второй и третий гироскопы установлены в корпусе гирогоризонткомпаса с осями чувствительности, параллельными основанию гирогоризонткомпаса, выход первого гироскопа дополнительно соединен с первым входом блока вычисления и автокомпенсации погрешности определения азимута, второй вход которого подключен к выходу блока выработки углов ориентации, выход блока вычисления и автокомпенсации погрешности определения азимута соединен с шестым входом блока выработки углов ориентации бортового вычислителя и первым входом блока управления подвесом, третий вход блока вычисления и автокомпенсации погрешности определения азимута соединен с первым выходом блока управления подвесом, седьмой вход блока выработки углов ориентации соединен со вторым выходом блока управления подвесом, входы первого и второго исполнительных устройств подвеса соединены с третьим и четвертым выходами блока управления подвесом, второй вход которого соединен с выходом управляющего устройства бортового вычислителя.
2. Гирогоризонткомпас по п.1, отличающийся тем, что блок выработки углов ориентации содержит блок выработки параметров ориентации, блок преобразования кажущихся ускорений, блок выработки параметров поступательного движения, блок построения вертикали, причем входы блока выработки параметров ориентации, соединенные с первым, вторым и третьим входами блока выработки углов ориентации, являются входами для сигналов первого, второго и третьего гироскопов, входы блока преобразования кажущихся ускорений, соединенные с четвертым и пятым входами блока выработки параметров ориентации, - входами для сигналов первого и второго акселерометров, первый дополнительный вход блока выработки параметров ориентации, соединенный с шестым входом блока выработки углов ориентации, является входом для сигнала с выхода блока вычисления и автокомпенсации погрешности определения азимута, второй дополнительный вход блока выработки параметров ориентации, соединенный с седьмым входом блока выработки углов ориентации, является входом для сигнала со второго выхода блока управления подвесом, выход блока выработки параметров ориентации, на который подаются сигналы о продольном и поперечном наклонах, является выходом блока выработки углов ориентации для подключения ко второму входу блока вычисления и автокомпенсации погрешности определения азимута.
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| US 3983474 A, 28.09.1976 | |||
| ИГНАТЬЕВ С.В | |||
| Гирогоризонткомпас на волоконно-оптических гироскопах с вращением блока чувствительных элементов | |||
| Навигация и управление движением | |||
| Сб | |||
| докладов IV конференции молодых ученых | |||
| - СПб.: ГНЦ РФ - ЦНИИ "Электроприбор", 2002, с.291-298 | |||
| ПЕТРОВ Б.Н | |||
| Избранные | |||

