Изобретение относится к области навигационного приборостроения.
Как известно, исходя из необходимости обеспечения высоких эксплуатационных характеристик (массо-габаритных характеристик - МГХ, надежности, времени готовности и т.д), основу перспективного бортового навигационного оборудования для подвижных объектов различного назначения будут составлять бескарданные инерциальные навигационные системы (БИНС) или инерциальные измерительные модули (БИИМ). Это одна из основных тенденций развития навигационного оборудования для современных подвижных объектов различного назначения. Для малогабаритных БИИМ среднего и низкого уровня точности, предназначенных для использования на малоразмерных динамичных объектах управления (ОУ), часть движения которых происходит по баллистической траектории, предпочтительным является использование в измерительных блоках (ИБ) БИИМ в качестве гироскопов датчиков угловой скорости (ДУС).
Особенностью требований, предъявляемых к ИБ БИИМ для их применения на ОУ рассматриваемого класса, следует считать прежде всего высокие требования по надежности и обеспечение его работоспособности вне герметичного корпуса в условиях воздействия радиационного излучения и значительного градиента температуры на достаточно длительном интервале времени. Кроме того, для данных ОУ характерны значительные динамические диапазоны (в которых требуется от ИБ БИИМ обеспечение соответствующих точностных характеристик): по угловой скорости - до 1000…2000 град/с, по линейному ускорению - до 150…200 g. А также выдерживать пусковые нагрузки - до 30000 g (Гай Э. "Наводящиеся снаряды с инерциальной навигационной системой на микромеханических датчиках, интегрированной с GPS". - Материалы V Санкт-Петербургской международной конференции по интегрированным навигационным системам. //Гироскопия и навигация. -1998. -№3(22), с.72…81).
К современным малогабаритным ДУС, которые могут быть использованы в составе ИБ БИИМ для его применения в условиях ОУ рассматриваемого класса, относятся прежде всего волоконно-оптические (ВОГ) и микромеханические (ММГ) гироскопы (Гай Э. "Наводящиеся снаряды с инерциальной навигационной системой на микромеханических датчиках, интегрированной с GPS". - Материалы V Санкт-Петербургской международной конференции по интегрированным навигационным системам. //Гироскопия и навигация.-1998. -№3 (22), с.72…81. Лобанов B.C., Тарасенко Н.В. "Использование корректируемой БИНС на основе волоконно-оптических гироскопов и кварцевых акселерометров для управления движением межпланетных космических аппаратов". Материалы XIII Санкт-Петербургской международной конференции по интегрированным навигационным системам. //Гироскопия и навигация. -2006. -№3(54), с.88).
Выполнение современных требований по точности решения задач ориентации и навигации подвижных объектов посредством использования БИИМ в автономном режиме работы на длительном интервале времени является сложной проблемой, решение которой требует значительных финансовых и временных затрат. Поэтому, исходя из критерия стоимости, как показывает мировой опыт, решение данной проблемы принято искать на путях интеграции информации бескарданных инерциальных модулей с приемной аппаратурой (ПА) спутниковых навигационных систем (СНС). То есть на путях построения интегрированных систем ориентации и навигации (ИСОН) на базе БИИМ, информационно и конструктивно интегрированных с ПА СНС (Гай Э. "Наводящиеся снаряды с инерциальной навигационной системой на микромеханических датчиках, интегрированной с GPS".
- Материалы V Санкт-Петербургской международной конференции по интегрированным навигационным системам. //Гироскопия и навигация. -1998.-№3(22), С.72…81. Дишель В.Д., Быков А.К. и др. "Анализ результатов первого летного испытания интегрированной инерциально-спутниковой системы навигации, ориентации и тракторного контроля ракеты-носителя и разгонного блока при выведении космического аппарата «Амос-2» на геостационарную орбиту". Материалы XI Санкт-Петербургской международной конференции по интегрированным навигационным системам. //Гироскопия и навигация. -2004. -№3(46), с.80. LINS-2510. INS/GPS Internal Navigation System with embedded Global Positioning System, проспект фирмы Litton (США).
Анучин О.Н., Емельянцев Г.И. "Интегрированные системы ориентации и навигации для морских подвижных объектов”/ под общ. редакц. акад. РАН В.Г.Пешехонова/. -СПб.: ЦНИИ «Электроприбор», 2003. - 389 с.). При этом преследуется цель обеспечения не только начальной выставки, калибровки чувствительных элементов (ЧЭ) и периодической коррекции выходных данных БИИМ для повышения информационной автономности системы, но и решение задачи повышения помехоустойчивости ПА СНС и контроля целостности спутниковой системы.
Особенностью построения ИСОН для ОУ, часть траектории полета которых является баллистической траекторией, является тот факт, что для решения с требуемой точностью задачи ориентации ОУ на участке баллистической траектории использование данных стандартной ПА СНС для интеграции с БИИМ неэффективно. Обусловлено это тем, что на баллистической траектории отсутствует связь между моделями погрешностей БИИМ в решении задач ориентации и навигации, т.к. в этих условиях значение вектора кажущегося ускорения, измеряемого акселерометрами ИБ БИИМ, практически равно нулю (если не учитывать торможение в верхних слоях атмосферы) (Эльясберг П.Е. "Введение в теорию полета ИСЗ". - М.: Наука, 1965. - 540 с.).
И, следовательно, отсутствует возможность в оценке погрешностей БИИМ в решении задачи ориентации (отсутствует их наблюдаемость) при использовании данных стандартной ПА СНС по навигационным параметрам.
Классическое решение данной задачи требует применения либо прецизионного БИИМ, либо использования в составе ИСОН или системы индикации углового положения, построенной на астродатчиках (Волынцев А.А., Дудько Л.А., Казаков Б.А. и др. "Опыт создания высокоточных поплавковых приборов, применяемых в системах угловой ориентации и стабилизации космических аппаратов и станций". Материалы X Санкт-Петербургской международной конференции по интегрированным навигационным системам. СПб.: ЦНИИ «Электроприбор». - 2003, с.226-234. Аванесов Г.А. и др. "Звездные координаторы систем ориентации космических аппаратов" // Изв. вузов. Приборостроение. - 2003, в.4, с.66-70), или мультиантенной ПА СНС, использующей фазовые измерения на несущей частоте (Шебшаевич Б.В. и др. "Бортовое синхронизирующее координатно-временное устройство для космических аппаратов. Результаты испытаний и моделирования". //12th Saint-Petersburg International Conference on Integrated Navigation Systems/. - СПб.: ЦНИИ «Электроприбор». - 2005, p.103-108).
Применение БИИМ на прецизионных лазерных гироскопах или ВОГ ведет к значительной стоимости (порядка 100…200 тыс. долл. США), существенным МГХ и энергопотреблению (LINS-2510. INS/GPS Internal Navigation System with embedded Global Positioning System, проспект фирмы Litton (США)).
Использование астродатчиков и мультиантенной ПА СНС в динамических условиях движения ОУ рассматриваемого класса при имеющих место ограничениях на их МГХ в ближайшее время не представляется возможным.
Известная схема (Гай Э. "Наводящиеся снаряды с инерциальной навигационной системой на микромеханических датчиках, интегрированной с GPS".
- Материалы V Санкт-Петербургской международной конференции по интегрированным навигационным системам. //Гироскопия и навигация. -1998. -№3(22), C.72…81) построения ИСОН, выбранная в качестве аналога, состоит из ИБ БИИМ, включающего блок микромеханических гироскопов и блок микромеханических акселерометров с обеспечивающей электроникой, стандартной миниатюрной ПА СНС и вычислителя, обеспечивающего как обработку данных ИБ БИИМ, так и интеграцию выходных данных БИИМ и ПА СНС. Недостатком данной схемы построения ИСОН является невозможность обеспечения, используя в составе ИБ БИИМ «грубые» гироскопы типа ММГ, решения задачи ориентации ОУ на баллистическом участке траектории с высокой точностью (погрешности параметров ориентации не должны быть более 1°) в течение длительного (порядка 10…20 мин) времени.
В рассмотренных патентах (Diesel, John W. Integrated inertial/GPS navigation System. Патент США №6417802 от 09.07.2002. Perlmutter, Michael S. и др. "Способ повышения эффективности повторного обнаружения и захвата сигнала спутника в интегрированной GPS/INS навигационной системе". Патент США №6640189 от 28.10.2003. Белов В.Д., Гунбин Т.А. и др. "Комплексная инерциально-спутниковая навигационная система". Патент РФ №2087867 от 20.08.1997. Волжин А.С., Вязьмикин А.А. и др. "Инерциально-спутниковая навигационная система". Патент РФ №2233431 С1 от 27.07.2004. Мезенцев А.П., Ачильдиев В.М. и др. "Универсальный навигационный прибор управления движением на основе микромеханических чувствительных элементов и унифицированная интегрированная бесплатформенная инерциальная навигационная система для этого прибора". Патент РФ №2263282 С1 от 27.10.2005.) также отсутствует решение рассматриваемой задачи.
Известен "Интегрированный комплекс для навигации и управления морских судов", описанный в патенте РФ №2117253 от 10.08.1998 г., выбранный в качестве прототипа.
Данная интегрированная система включает БИИМ, который содержит ИБ, состоящий из блока гироскопов (БГ) и блока акселерометров (БА), вычислительного устройства (ВУ), которое, в свою очередь, содержит блок выработки параметров ориентации (БВПО), блок преобразования приращений кажущейся скорости (БППКС), блок выработки параметров поступательного движения (БВППД), блок комплексной обработки информации (БКОИ), блок преобразования данных (БПД) СНС и блок БПДИК интегрированной системы, а также ПА СНС с антенной (А).
Выходными данными ИСОН являются текущие значения параметров ориентации (кватернион и углы курса, тангажа и крена) и навигационные параметры (составляющие вектора линейной скорости и координаты местоположения) объекта управления.
Функционирование рассматриваемой ИСОН осуществляется следующим образом. Выходные данные ИБ БИИМ, представляющие собой приращения вектора угла поворота  на частоте опроса гироскопов в проекциях на связанные с ИБ БИИМ оси xbybzb (здесь
на частоте опроса гироскопов в проекциях на связанные с ИБ БИИМ оси xbybzb (здесь  - вектор угловой скорости ОУ относительно инерциального пространства в проекциях на связанные с ИБ оси xbybzb), поступают на один из входов блока БВПО, назначением которого является выработка параметров ориентации ИБ БИИМ и объекта:
- вектор угловой скорости ОУ относительно инерциального пространства в проекциях на связанные с ИБ оси xbybzb), поступают на один из входов блока БВПО, назначением которого является выработка параметров ориентации ИБ БИИМ и объекта:  - кватерниона углового положения и углов K, ψ, θ - курса, тангажа и крена, характеризующих положение связанных с ИБ БИИМ xbybzb и объектом x0y0z0 осей относительно навигационных географических осей ENH. На второй вход блока БВПО поступают расчетные значения вектора угловой скорости вращения навигационного трехгранника ENH с одного из выходов блока БВППД через блок БКОИ. На вход блока БВПО поступают также оценки погрешностей параметров ориентации и оценки погрешностей гироскопов, вычисляемые в блоке БКОИ.
- кватерниона углового положения и углов K, ψ, θ - курса, тангажа и крена, характеризующих положение связанных с ИБ БИИМ xbybzb и объектом x0y0z0 осей относительно навигационных географических осей ENH. На второй вход блока БВПО поступают расчетные значения вектора угловой скорости вращения навигационного трехгранника ENH с одного из выходов блока БВППД через блок БКОИ. На вход блока БВПО поступают также оценки погрешностей параметров ориентации и оценки погрешностей гироскопов, вычисляемые в блоке БКОИ.
Выходные данные блока БА БИИМ, представляющие собой приращения векторов кажущихся линейной скорости и линейного перемещения 
 на частоте опроса акселерометров в точке их размещения и в проекциях на связанные с ИБ БИИМ оси xbybzb (здесь
на частоте опроса акселерометров в точке их размещения и в проекциях на связанные с ИБ БИИМ оси xbybzb (здесь  - вектор кажущегося ускорения в проекциях на связанные с ИБ оси xbybzb), поступают через блок БППКС на один из входов блока БВППД, назначением которого является выработка составляющих вектора линейной скорости
- вектор кажущегося ускорения в проекциях на связанные с ИБ оси xbybzb), поступают через блок БППКС на один из входов блока БВППД, назначением которого является выработка составляющих вектора линейной скорости  в проекциях на навигационные оси ENH и координат
в проекциях на навигационные оси ENH и координат  (составляющих радиус-вектора в проекциях на гринвичские оси и геодезических сферических координат φ, λ, h) ОУ в точке размещения акселерометров. На вход блока БВППД поступают также оценки погрешностей навигационных параметров и оценки погрешностей акселерометров, вычисляемые в блоке БКОИ.
(составляющих радиус-вектора в проекциях на гринвичские оси и геодезических сферических координат φ, λ, h) ОУ в точке размещения акселерометров. На вход блока БВППД поступают также оценки погрешностей навигационных параметров и оценки погрешностей акселерометров, вычисляемые в блоке БКОИ.
Информация от приемной антенны СНС поступает в ПА СНС, содержащую радиоприемное устройство (РПУ), N независимых приемо-измерительных каналов - ПИК, и блок решения навигационной задачи (БРНЗ), на выходе которой имеем текущие значения составляющих вектора линейной скорости  в проекциях на навигационные оси ENH и координат
в проекциях на навигационные оси ENH и координат  (составляющих радиус-вектора в проекциях на гринвичские оси и геодезических сферических координат φснс, λснс, hснс) объекта управления. Выходные данные ПА СНС через блок БПД СНС поступают на один из входов блока БКОИ, на второй вход которого поступают данные БИИМ из блока БВППД.
(составляющих радиус-вектора в проекциях на гринвичские оси и геодезических сферических координат φснс, λснс, hснс) объекта управления. Выходные данные ПА СНС через блок БПД СНС поступают на один из входов блока БКОИ, на второй вход которого поступают данные БИИМ из блока БВППД.
Следует заметить, что в состав систем слежения за несущей частотой (ССН) и слежения за задержкой кода (ССЗ) стандартной ПА СНС входят дискриминатор, широкополосный фильтр (ФШ) и управляемый генератор (УГ).
Оценки, выработанные в блоке БКОИ, поступают в обратную связь для коррекции погрешностей БИИМ в выработке параметров ориентации и компенсации погрешностей гироскопов, коррекции погрешностей БИИМ в выработке навигационных параметров и погрешностей акселерометров.
Недостатком схемы построения ИСОН, выбранной в качестве прототипа, является ее ограниченная помехоустойчивость и невозможность обеспечения, используя в составе ИБ БИИМ «грубые» гироскопы типа ММГ, решения задачи ориентации ОУ на баллистическом участке траектории с высокой точностью.
Если же использовать в составе ИБ БИИМ более точные гироскопы типа ВОГ, то это приведет к значительному увеличению массо-габаритных характеристик и стоимости ИСОН.
Задачей изобретения является повышение точности и помехоустойчивости ИСОН, содержащей БИИМ на «грубых» гироскопах типа ММГ и миниатюрную ПА СНС, в выработке параметров ориентации ОУ на участке баллистической траектории его движения в течение длительного времени, т.е. обеспечение стационарного характера и ограниченного уровня погрешностей ИСОН в решении задачи ориентации ОУ на баллистической траектории, а также высокого уровня помехоустойчивости.
Поставленная задача решается тем, что создаются условия, в которых появляется и используется существенная связь на участке баллистической траектории между моделями погрешностей БИИМ в решении задач ориентации и навигации. Данная связь появляется и может быть использована при обеспечении следующих условий:
- наличия быстрого вращения вокруг продольной оси и конического движения прецессии ОУ относительно центра масс (ц.м.) или только вращения объекта вокруг продольной оси на баллистической траектории;
- размещения блока акселерометров БИИМ и приемной антенны СНС на некотором отстоянии от ц.м. ОУ в основном по поперечной оси (отстояние от оси вращения);
- решения задач ориентации и навигации в БИИМ в точке размещения блока акселерометров на высокой частоте - примерно на порядок больше частоты вращения ОУ (из-за необходимости выработки без искажений динамических составляющих в навигационных параметрах);
- формирования измеренных значений первичных навигационных параметров (расстояний и радиальных скоростей для наблюдаемых HCi) в ПА СНС в точке размещения приемной антенны следящими измерителями с полосой пропускания примерно на порядок больше частоты вращения ОУ.
Реализация данных условий и представляет собой основное отличие предлагаемого устройства от прототипа, что требует внесения соответствующих изменений как в блоки БИИМ, так и блоки ПА СНС. Кроме того, в вычислителе БИИМ формируются расчетные значения первичных навигационных параметров (расстояний и радиальных скоростей для наблюдаемых HCi), которые также используются в обратной связи в ПА СНС для сужения полосы пропускания в системах слежения за несущей частотой (ССН) и задержкой кода (ССЗ).
Перечень чертежей.
На фиг.1 и 2 изображена структурная схема предлагаемой ИСОН.
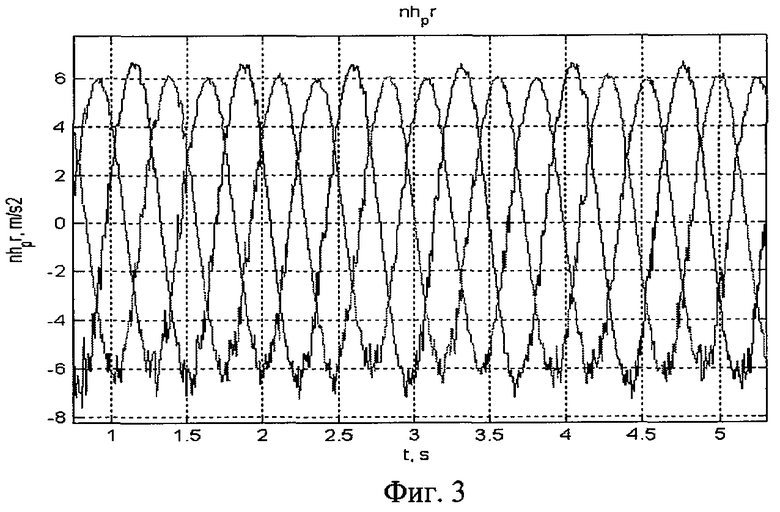
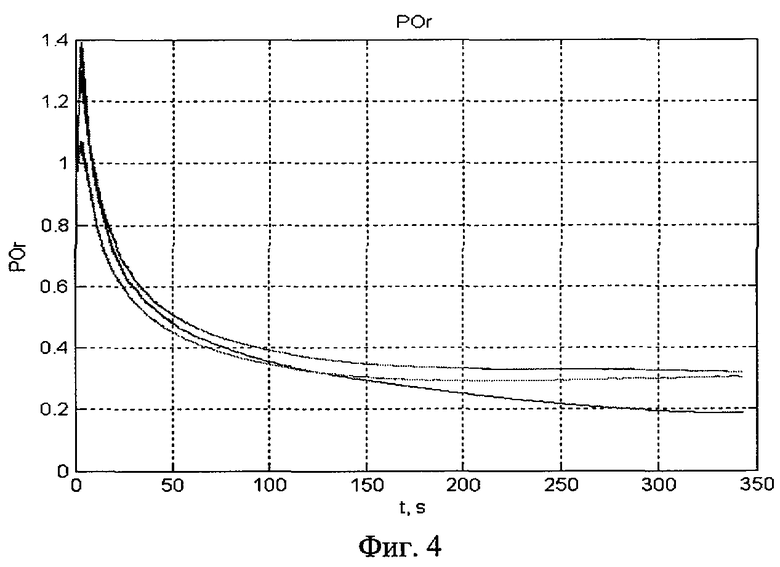
На фиг.3 и 4 изображены результаты моделирования погрешностей ИСОН, из которых следует, что при соблюдении условий, приведенных выше, обеспечивается стационарный характер и ограниченный уровень погрешностей ИСОН в решении задачи ориентации ОУ при движении по баллистической траектории.
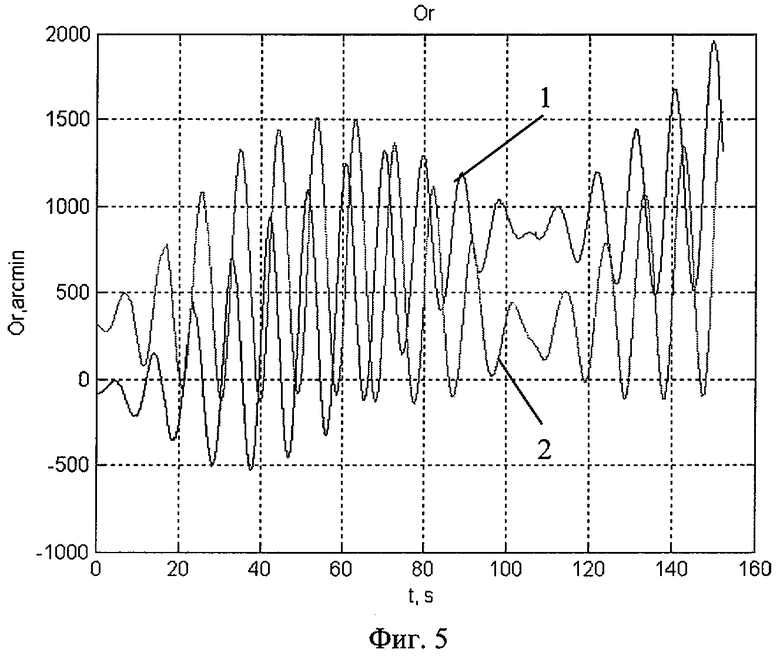
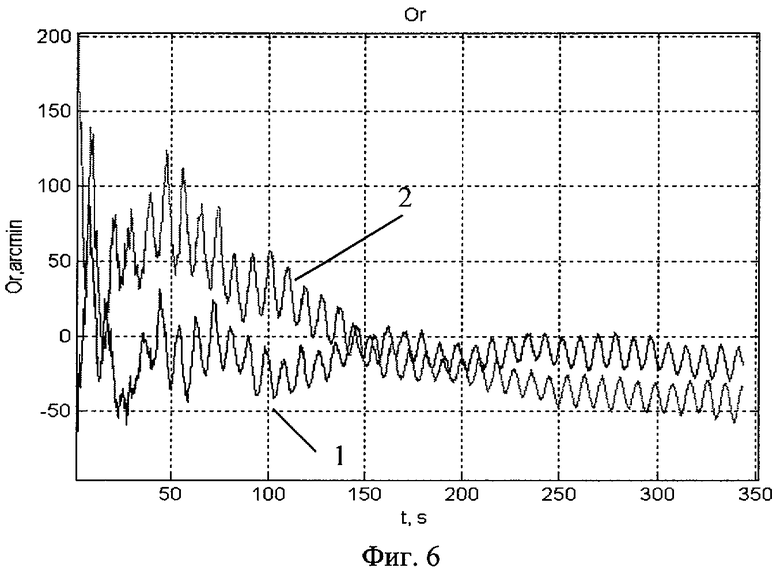
На фиг.5 и 6 изображены погрешности (угл. мин) ИСОН по параметрам ориентации Δψ(1), ΔК(2) при отсутствии отстояния блока акселерометров БИИМ от центра масс ОУ и при наличии отстояния блока акселерометров БИИМ от центра масс ОУ соответственно.
На фиг.1 приняты следующие обозначения:
БИИМ - бескарданный инерциальный измерительный модуль;
ПА СНС - приемная аппаратура спутниковых навигационных систем;
1 - блок гироскопов (БГ);
2 - блок акселерометров (БА);
3 - блок выработки параметров ориентации (БВПО);
4 - блок выработки параметров поступательного движения (БВППД);
5 - блок пересчета данных интегрированной системы (БПД);
6 - блок формирования разностных измерений (БФРИ);
7 - блок комплексной обработки информации (БКОИ);
8 - антенное устройство (АУ);
9 - радиоприемное устройство (РПУ);
10 - блок выделения радионавигационных параметров и специальной информации (БВРНПиСИ);
11 - блок решения навигационных задач (БРНЗ).
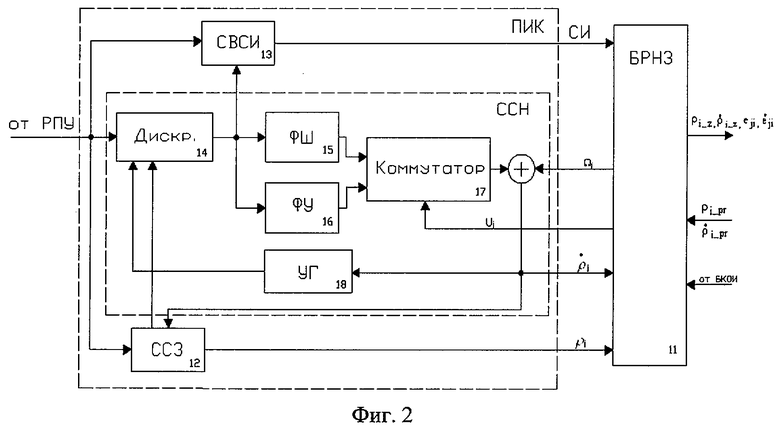
На фиг.2 приняты следующие обозначения:
ССН - система слежения за несущей частотой;
Ωi - доплеровское смещение несущей частоты i-го НСi, определяемое по данным БИИМ;
Ui - сигнал управления коммутаторами, переключающими полосы ССН и ССЗ при переходе к режиму поддержки от БИИМ;
12 - система слежения за задержкой кода (ССЗ);
13 - схема выделения специальной информации - значения эфемерид HC1 (СВСИ);
14 - дискриминатор (Дискр.);
15 - широкополосный фильтр в составе ССН (ФШ);
16 - узкополосный фильтр в составе ССН (ФУ);
17 - коммутатор (Коммутатор);
18 - управляемый генератор ССН и управляемый генератор ССЗ (УГ).
Отличие от прототипа заключается в том, что дополнительно введен блок формирования разностных измерений 6 (БФРИ). Введена дополнительная обратная связь от блока 6 (БФРИ) к блоку 11 (БРНЗ) ПА СНС, обеспечивающая поступление расчетных значений (вычисляемых по данным БИИМ и эфемеридной информации НСi) первичных навигационных параметров (расстояний и радиальных скоростей для наблюдаемых HCi) в ПА СНС. Введена также дополнительная обратная связь от блока 7 (БКОИ) к блоку 11 (БРНЗ), обеспечивающая поступление оценок погрешностей ПА СНС, вычисляемых в блоке 7 (БКОИ), в ПА СНС.
Для повышения помехоустойчивости ПА СНС введена дополнительная обратная связь от блока 11 (БРНЗ) к блоку 10 (БВРНПиСИ), обеспечивающая поступление расчетных данных (доплеровское смещение несущей частоты i-го HCi, определяемое по данным БИИМ) и управляющих сигналов в контур ССН каждого ПИК. При этом в ССН каждого ПИК блока 10 (БВРНПиСИ) (фиг.2) введены дополнительно блоки 16 (ФУ), 17 (Коммутатор) и сумматор. Фильтр 16 (ФУ), имеющий узкую полосу, включается в петлю ССН вместо широкополосного фильтра 15 (ФШ) коммутатором 17 после получения информационной поддержки от БИИМ, что повышает помехоустойчивость ПА СНС.
Кроме того, введена дополнительная связь выхода блока 5 (БПД) интегрированной системы с входом блока 6 (БФРИ), обеспечивающая пересчет навигационных данных БИИМ от точки размещения блока 2 (БА) на объекте к точке размещения блока 8 (АУ) ПА СНС.
Отличительным является также то, что блок 2 (БА) и блок 8 (АУ) должны быть установлены на максимальном расстоянии от ц.м. ОУ по поперечной оси.
Алгоритмическое обеспечение блоков 3 (БВПО), 4 (БВППД) аналогично алгоритмам работы аналогичных блоков прототипа. Отличие заключается в том, что частота решения задач в блоках 3 (БВПО), 4 (БВППД) должна быть примерно на порядок больше частоты вращения ОУ (из-за необходимости выработки без искажений динамических составляющих в навигационных параметрах) в точке размещения блока акселерометров.
В блоке 6 (БФРИ) разностные измерения в отличие от прототипа формируются на уровне первичных навигационных параметров (расстояний и радиальных скоростей для наблюдаемых HCi), а также осуществляется их линеаризация.
Полоса пропускания следящих систем должна быть больше частоты вращения ОУ (из-за необходимости выработки без искажений динамических составляющих в первичных навигационных параметрах для каждого НСi).
Информация от блока 8 (АУ) ПА СНС через блоки 9 (РПУ) и 10 (БВРНПиСИ) поступает в блок 11 (БРНЗ), на выходе которого имеем текущие откорректированные «измеренные» значения ρi_z и  первичных навигационных параметров (расстояний и радиальных скоростей от ОУ до каждого из наблюдаемых НСi) в точке размещения приемной антенны на частоте не ниже 5÷30 Гц (из-за необходимости измерения динамических составляющих, обусловленных вращением вокруг продольной оси и возможным коническим движением ОУ относительно его ц.м.). На выходе блока БРНЗ формируются также из эфемеридной информации откорректированные значения
первичных навигационных параметров (расстояний и радиальных скоростей от ОУ до каждого из наблюдаемых НСi) в точке размещения приемной антенны на частоте не ниже 5÷30 Гц (из-за необходимости измерения динамических составляющих, обусловленных вращением вокруг продольной оси и возможным коническим движением ОУ относительно его ц.м.). На выходе блока БРНЗ формируются также из эфемеридной информации откорректированные значения  (j=1, 2, 3) декартовых координат и составляющих вектора абсолютной линейной скорости HCi в проекциях на гринвичские оси для каждого наблюдаемого HCi, синхронизированные с данными ρi_z и .
(j=1, 2, 3) декартовых координат и составляющих вектора абсолютной линейной скорости HCi в проекциях на гринвичские оси для каждого наблюдаемого HCi, синхронизированные с данными ρi_z и .
Выходные данные ρi_z, и (j=1, 2, 3) ПА СНС поступают на один из входов блока 6 (БФРИ). На второй вход блока 6 (БФРИ) поступают данные БИИМ о декартовых координатах ej_pr и составляющих  (j=1, 2, 3) вектора абсолютной линейной скорости объекта в проекциях на гринвичские оси, по которым с использованием данных (j=1, 2, 3) формируются расчетные значения
(j=1, 2, 3) вектора абсолютной линейной скорости объекта в проекциях на гринвичские оси, по которым с использованием данных (j=1, 2, 3) формируются расчетные значения  и
и  первичных навигационных параметров для наблюдаемых HCi и разностные измерения
первичных навигационных параметров для наблюдаемых HCi и разностные измерения  ,
,  .
.
С выхода блока 6 (БФРИ) измерения  ,
,  поступают на вход блока 7 (БКОИ). Оценки, выработанные в блоке 7 (БКОИ), поступают в обратную связь для коррекции погрешностей БИИМ в выработке параметров ориентации и компенсации погрешностей гироскопов (на вход блока 3 (БВПО)), коррекции погрешностей БИИМ в выработке навигационных параметров и погрешностей акселерометров (на вход блока 4 (БВППД)), а также коррекции погрешностей ПА СНС (на вход блока 11 (БРНЗ)).
поступают на вход блока 7 (БКОИ). Оценки, выработанные в блоке 7 (БКОИ), поступают в обратную связь для коррекции погрешностей БИИМ в выработке параметров ориентации и компенсации погрешностей гироскопов (на вход блока 3 (БВПО)), коррекции погрешностей БИИМ в выработке навигационных параметров и погрешностей акселерометров (на вход блока 4 (БВППД)), а также коррекции погрешностей ПА СНС (на вход блока 11 (БРНЗ)).
Существо предлагаемого решения сводится к следующему.
Если ИБ БИИМ разместить на ОУ в точке m с некоторым отстоянием  в осях связанного с ОУ трехгранника xoyozo от его ц.м., то вектор
в осях связанного с ОУ трехгранника xoyozo от его ц.м., то вектор  кажущегося ускорения в точке m при допущении, что объект является абсолютно жестким и обладает вектором угловой скорости
кажущегося ускорения в точке m при допущении, что объект является абсолютно жестким и обладает вектором угловой скорости  (из-за вращения вокруг продольной оси и возможного конического вращения относительно ц.м.), может быть представлен в виде (Анучин О.Н., Емельянцев Г.И. "Интегрированные системы ориентации и навигации для морских подвижных объектов”/ под общ. редакц. акад. РАН В.Г.Пешехонова/. - СПб.: ЦНИИ «Электроприбор», 2003. - 389 с.):
(из-за вращения вокруг продольной оси и возможного конического вращения относительно ц.м.), может быть представлен в виде (Анучин О.Н., Емельянцев Г.И. "Интегрированные системы ориентации и навигации для морских подвижных объектов”/ под общ. редакц. акад. РАН В.Г.Пешехонова/. - СПб.: ЦНИИ «Электроприбор», 2003. - 389 с.):

где  - значение вектора кажущегося ускорения в ц.м. ОУ (на участке баллистической траектории его значение равно нулю).
- значение вектора кажущегося ускорения в ц.м. ОУ (на участке баллистической траектории его значение равно нулю).
Пусть  - есть значения вектора кажущегося ускорения точки установки акселерометров ИБ БИИМ в проекциях на оси объекта, тогда проекции вектора кажущегося ускорения точки m на оси географического сопровождающего трехгранника ENH будут равны:
- есть значения вектора кажущегося ускорения точки установки акселерометров ИБ БИИМ в проекциях на оси объекта, тогда проекции вектора кажущегося ускорения точки m на оси географического сопровождающего трехгранника ENH будут равны:

где  - матрица ориентации, характеризующая положение связанных с ОУ осей относительно осей географического сопровождающего трехгранника.
- матрица ориентации, характеризующая положение связанных с ОУ осей относительно осей географического сопровождающего трехгранника.
Из выражения (1) следует, что при соответствующем отстоянии ИБ БИИМ от ц.м. ОУ, т.е. при  ≠0 в условиях быстрого вращения объекта и (или) конического движения
≠0 в условиях быстрого вращения объекта и (или) конического движения  ≠0.
≠0.
Покажем, что данное условие ≠0 приводит к наличию связи на баллистической траектории между моделями погрешностей БИИМ в решении задач ориентации и навигации, что является необходимым условием для положительного решения рассматриваемой проблемы.
В соответствии с алгоритмом задачи преобразования сигналов акселерометров на навигационные оси ENH согласно выражению (2) вариации вектора кажущегося ускорения в осях географического сопровождающего трехгранника будут равны

где  - вектор инструментальных погрешностей акселерометров в осях объекта. Учитывая, что Δ
- вектор инструментальных погрешностей акселерометров в осях объекта. Учитывая, что Δ
 =-δ
=-δ , где δ - кососимметрическая матрица, соответствующая вектору
, где δ - кососимметрическая матрица, соответствующая вектору  погрешностей задачи ориентации (Анучин О.Н., Емельянцев Г.И. "Интегрированные системы ориентации и навигации для морских подвижных объектов”/ под общ. редакц. акад. РАН В.Г.Пешехонова/. - СПб.: ЦНИИ «Электроприбор», 2003. - 389 с.), получим
погрешностей задачи ориентации (Анучин О.Н., Емельянцев Г.И. "Интегрированные системы ориентации и навигации для морских подвижных объектов”/ под общ. редакц. акад. РАН В.Г.Пешехонова/. - СПб.: ЦНИИ «Электроприбор», 2003. - 389 с.), получим
 или
или 
где  - вектор погрешностей задачи ориентации.
- вектор погрешностей задачи ориентации.
Варьируя алгоритм выработки БИИМ составляющих вектора линейной скорости точки m объекта в осях географического трехгранника

где  ,
,  - расчетные значения ускорения силы тяжести и кориолисова ускорения, будем иметь с учетом соотношения (4)
- расчетные значения ускорения силы тяжести и кориолисова ускорения, будем иметь с учетом соотношения (4)

где  ,
,  - погрешности формирования соответственно оценок кориолисова ускорения и ускорения силы тяжести, включая и аномалии гравитационного поля Земли.
- погрешности формирования соответственно оценок кориолисова ускорения и ускорения силы тяжести, включая и аномалии гравитационного поля Земли.
Из уравнения (5) следует, что погрешности  БИИМ в выработке вектора линейной скорости ОУ в точке размещения блока акселерометров в проекциях на навигационные оси в условиях баллистической траектории при
БИИМ в выработке вектора линейной скорости ОУ в точке размещения блока акселерометров в проекциях на навигационные оси в условиях баллистической траектории при  ≠0 будут зависеть также и от вектора
≠0 будут зависеть также и от вектора  погрешностей БИИМ в выработке параметров ориентации объекта.
погрешностей БИИМ в выработке параметров ориентации объекта.
Следовательно, если БИИМ (при соответствующем выборе динамических характеристик инерциальных элементов и частоты решения задач ориентации и навигации) будет обеспечивать измерение динамических составляющих в векторе линейной скорости, обусловленных быстрым вращением ОУ вокруг продольной оси и его коническим движением при соответствующем отстоянии его ИБ от ц.м. объекта, то из разностных измерений с опорой на данные ПА СНС (где также должна содержаться информация о вращении ОУ) путем наблюдения за погрешностью БИИМ на конечном интервале времени можно найти оценки искомых погрешностей  БИИМ в выработке параметров ориентации объекта, движущегося по баллистической траектории.
БИИМ в выработке параметров ориентации объекта, движущегося по баллистической траектории.
Данная задача в наземных условиях (где всегда обеспечивается ≠0) для погрешностей выработки крена и тангажа решается без особых проблем.
Для проведения данных исследований была разработана в пакете Matlab (Simulink) имитационная модель функционирования ИСОН, включающая:
- имитационную модель движения группировки (6-ти) навигационных спутников (НСi) по орбитам, близким к круговым, которая содержит формирование параметров поступательного движения ц.м. HCi, в геоцентрической гринвичской системе координат П3-90 (эфемеридной информации для каждого HCi) с учетом принятой модели гравитационного поля Земли;
- имитационную модель движения объекта, которая содержит задание параметров как поступательного движения его ц.м. (ускорения, линейные скорости, географические и декартовые координаты в гринвичской системе координат П3-90), так и вращательного - относительно ц.м.;
- формирование выходных данных ИБ БИИМ (блока гироскопов типа ММГ и блока микромеханических акселерометров - ММА) на базе текущих истинных значений векторов угловой скорости и кажущегося ускорения точки размещения ИБ на объекте (восстановленных из модели движения ОУ) с использованием массивов реализаций выходных данных гироскопов и акселерометров, полученных при их стендовых испытаниях;
- дискретные рекуррентные алгоритмы основных функциональных задач БИИМ;
- задачу фильтрации по совместной обработке с использованием алгоритмов обобщенного фильтра Калмана данных БИИМ и ПА СНС, включающую:
- формирование разностных измерений на уровне откорректированных значений дальности и радиальной скорости для каждого HCi и их линеаризацию относительно текущих расчетных значений;
- вычисление оценок погрешностей БИИМ и коррекцию в обратной связи на каждом шаге решения задачи фильтрации;
- алгоритмы контроля погрешностей ИСОН в выработке кинематических параметров движения объекта, включающие запись их текущих значений в file.mat и построение графиков погрешностей.
Приведем алгоритм формирования в задаче совместной обработки данных БИИМ и ПА СНС разностных измерений:
Формирование измерений


где 
 - расчетные текущие значения дальности и радиальной скорости до HCi, полученные по данным БИИМ и эфемеридной информации для НСi и приведенные к точке расположения антенны ПА СНС;
- расчетные текущие значения дальности и радиальной скорости до HCi, полученные по данным БИИМ и эфемеридной информации для НСi и приведенные к точке расположения антенны ПА СНС; 
 - их измеренные в ПА СНС значения.
- их измеренные в ПА СНС значения.
Линеаризация измерений


где для частных производных получим следующие выражения:

Δ , Δ
, Δ (j=1, 2, 3) - погрешности БИИМ в выработке декартовых координат еj_pr и составляющих
(j=1, 2, 3) - погрешности БИИМ в выработке декартовых координат еj_pr и составляющих  (j=1, 2, 3) вектора абсолютной линейной скорости объекта впроекциях на гринвичские оси, которые были представлены через погрешности Δφ, Δλ, Δh выработки географических координат места и погрешности ΔVE, ΔVN, ΔVH в выработке составляющих вектора относительной линейной скорости объекта в проекциях на географические оси;
(j=1, 2, 3) вектора абсолютной линейной скорости объекта впроекциях на гринвичские оси, которые были представлены через погрешности Δφ, Δλ, Δh выработки географических координат места и погрешности ΔVE, ΔVN, ΔVH в выработке составляющих вектора относительной линейной скорости объекта в проекциях на географические оси;

 (j=1, 2, 3) - известные значения декартовых координат и составляющих вектора абсолютной линейной скорости HCi в проекциях на гринвичские оси;
(j=1, 2, 3) - известные значения декартовых координат и составляющих вектора абсолютной линейной скорости HCi в проекциях на гринвичские оси;

 - смещения соответственно шкалы времени (в единицах дальности) и частоты опорного генератора (в единицах радиальной скорости) в ПА СНС относительно данных HCi;
- смещения соответственно шкалы времени (в единицах дальности) и частоты опорного генератора (в единицах радиальной скорости) в ПА СНС относительно данных HCi;
 ,
, - шумы ПА СНС.
- шумы ПА СНС.
Расчетная модель погрешностей
При формировании расчетной модели погрешностей ИСОН использовались следующие аппроксимации:
- смещения нулей гироскопов  (i = xb, уb, zb) и акселерометров
(i = xb, уb, zb) и акселерометров  изменения систематических составляющих погрешностей масштабных коэффициентов ММГ ΔMgi и MMA ΔMai от запуска к запуску и их изменчивость в пуске - были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
изменения систематических составляющих погрешностей масштабных коэффициентов ММГ ΔMgi и MMA ΔMai от запуска к запуску и их изменчивость в пуске - были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
- погрешности 
 ПА СНС были аппроксимированы соответствующими винеровскими процессами (в данном случае рассматривается общая постановка задачи оценивания величин
ПА СНС были аппроксимированы соответствующими винеровскими процессами (в данном случае рассматривается общая постановка задачи оценивания величин 
 при отсутствии достоверной информации о характере их изменения. При конкретизации задачи оценивания величин
при отсутствии достоверной информации о характере их изменения. При конкретизации задачи оценивания величин 
 возможно описание их изменения полиномами времени, при этом задача оценивания сводится к задаче оценивания коэффициентов этих полиномов);
возможно описание их изменения полиномами времени, при этом задача оценивания сводится к задаче оценивания коэффициентов этих полиномов);
- шумы 
 ПА СНС аппроксимированы дискретными белыми шумами с известными дисперсиями на частоте 1/Tz;
ПА СНС аппроксимированы дискретными белыми шумами с известными дисперсиями на частоте 1/Tz;
В этом случае расчетная модель погрешностей ИСОН будет иметь вид


где

- вектор состояния системы, здесь α, β, γ - погрешности (α - по курсу, β, γ - в моделировании вертикали места) задачи ориентации в построении географического трехгранника ENH (вычислении матрицы ориентации  );
);
Фk/k+1 - переходная на шаге Тz матрица состояния системы (9);
Гk+1 ≅ Фk+1·dT - матрица, определяющая влияние вектора входных шумов wk с ковариациями Qk;
Hk+1 - матрица измерений размерности 2×23 для каждого HCi, соответствующая уравнениям (7), (8) с учетом соотношений связи между погрешностями выработки декартовых и географических координат места и погрешностями в выработке составляющих вектора линейной скорости объекта в проекциях на гринвичские и географические оси; vk+l - шумы измерений.
Результаты моделирования работы ИСОН в пакете Matlab(Simulink)
Моделирование осуществлялось при следующих исходных данных:
- характеристики Земли и гравитационного поля
R=6378163 - средний экваториальный радиус Земли, (м);
Ue=7.2921151467·10-5 - угловая скорость суточного вращения Земли, (рад/с);
µg=3.98603·1014 - гравитационная постоянная Земли, (м3/с2); ε=2.634·1025 (м5/с2) и χ=6.773·1036 (м7/с2) - коэффициенты разложения гравитационного потенциала (Эльясберг П.Е. Введение в теорию полета ИСЗ. - М.: Наука, 1965. - 540 с.);
Погрешности ММГ в проекциях на оси (i = xb, yb, zb) ИБ:
- ΔMgi - нестабильность масштабных коэффициентов - случайные величины с уровнем (1σ=0.006…0.01);
-  - систематические составляющие дрейфов, которые характеризуют смещение нулей от пуска к пуску - случайные величины с уровнем (1σ=100 о/ч);
- систематические составляющие дрейфов, которые характеризуют смещение нулей от пуска к пуску - случайные величины с уровнем (1σ=100 о/ч);
- - случайные составляющие дрейфов, которые характеризуют дрейф нуля в пуске - марковские процессы первого порядка σ1gi=30 о/ч, µgi=1/600 (с-1);
- флюктуационные составляющие дрейфов - дискретные белые шумы на рабочей частоте σ2gi=300 о/ч;
Погрешности ММА в проекциях на оси (I = xb, yb, zb) ИБ:
- ΔMai - нестабильность масштабных коэффициентов линейных акселерометров - случайные величины с уровнем (1σ=0.01);
- Δ i - смещение нулей линейных акселерометров - случайные величины с уровнем (1σ=0.1 м/с2);
i - смещение нулей линейных акселерометров - случайные величины с уровнем (1σ=0.1 м/с2);
- Δai - дрейфы нулей линейных акселерометров - марковские процессы первого порядка σ1ai=0.03 м/с2, (µai=0.01 (с-1);
- флюктуационные составляющие погрешностей акселерометров в проекциях на оси ИБ - дискретные белые шумы на рабочей частоте σ2ai;=0.4 м/с.
ПА СНС:
- погрешности (систематические составляющие) измерений
 =10…20 (м);
=10…20 (м);
 =0.1..0.2 (м/с);
=0.1..0.2 (м/с);
- шумы измерений (1σ)
 =10 (м);
=10 (м);
=0.1 (м/с);
БИИМ
- отстояние блока акселерометров БИИМ от центра масс ОУ
ρx0=0.1 м; ρу0=0.2 м; ρz0=0
• погрешности начальной выставки БИИМ (t=0):
- по параметрам ориентации (α0, β0, γ0)-1°;
- по составляющим вектора линейной скорости - 0.1 м/с;
- по координатам - 30 м.
Рабочие частоты при моделировании
dt=0.001 с - дискретность моделирования движения ОУ по траектории;
dT=0.005 с - дискретность работы алгоритмов БИИМ;
Tz=0.1…0.2 с - дискретность поступления данных СНС.
Движение ОУ на участке баллистической траектории: начальные условия по параметрам движения с учетом вращения  вокруг продольной оси и конического вращения (ε - угол при вершине конуса, ωk - угловая скорость конического вращения; Kr, ψК, ψr, ψψ, θr, ψθ - амплитуда и фаза углового движения соответственно по курсу, тангажу и крену)
вокруг продольной оси и конического вращения (ε - угол при вершине конуса, ωk - угловая скорость конического вращения; Kr, ψК, ψr, ψψ, θr, ψθ - амплитуда и фаза углового движения соответственно по курсу, тангажу и крену)
φ0=60°; λ0=30°; ho=0.3·106 м; Vo=6000 м/с;
K(t)=Aor0+Krsin(ωkt+ψK); Aor0=40°; Kr=-ε; ψK=90°; ε=6°;
ωk=0.5,…,1.0 (рад/с);
ψ(t)=ψcm0+ψrsin(ωkt+ψψ); ψcm0=40°; ψr=ε; ψψ=0°; θ0=0°;  =6,…,10 (рад/с);
=6,…,10 (рад/с);
На фиг.3, фиг.4 приведены значения кажущегося ускорения при движении ОУ по баллистической траектории и значения нормированных дисперсий погрешностей ориентации (из ковариационного канала фильтра Калмана).
Литература
1. Гай Э. Наводящиеся снаряды с инерциальной навигационной системой на микромеханических датчиках, интегрированной с GPS. - Материалы V Санкт-Петербургской международной конференции по интегрированным навигационным системам. // Гироскопия и навигация. -1998. - №3 (22), с.72…81.
2. Лобанов B.C., Тарасенко Н.В. Использование корректируемой БИНС на основе волоконно-оптических гироскопов и кварцевых акселерометров для управления движением межпланетных космических аппаратов. Материалы XIII Санкт-Петербургской международной конференции по интегрированным навигационным системам. // Гироскопия и навигация. - 2006. - №3(54), с.88.
3. Дишель В.Д., Быков А.К. и др. Анализ результатов первого летного испытания интегрированной инерциально-спутниковой системы навигации, ориентации и тракторного контроля ракеты-носителя и разгонного блока при выведении космического аппарата «Амос-2» на геостационарную орбиту. Материалы XI Санкт-Петербургской международной конференции по интегрированным навигационным системам. // Гироскопия и навигация. - 2004. - №3(46), с.80.
4. Волынцев А.А., Дудько Л.А., Казаков Б.А. и др. Опыт создания высокоточных поплавковых приборов, применяемых в системах угловой ориентации и стабилизации космических аппаратов и станций. Материалы X Санкт-Петербургской международной конференции по интегрированным навигационным системам. СПб.: ЦНИИ «Электроприбор». - 2003, с.226-234.
5. Аванесов Г.А. и др. Звездные координаторы систем ориентации космических аппаратов // Изв. вузов. Приборостроение. - 2003, в.4, с.66-70.
6. Шебшаевич Б.В. и др. Бортовое синхронизирующее координатно-временное устройство для космических аппаратов. Результаты испытаний и моделирования. // 12th Saint-Petersburg International Conference on Integrated Navigation Systems /. - СПб.: ЦНИИ «Электроприбор». - 2005, p.103-108.
7. LINS-2510. INS/GPS Internal Navigation System with embedded Global Positioning System, проспект фирмы Litton (США).
8. Бранец B.H., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. - М.: Наука. Гл. ред. физ.-мат. лит., 1992. - 280 с.
9. Степанов О.А. Применение теории нелинейной фильтрации в задачах обработки навигационной информации. - СПб.: ГНЦ РФ - ЦНИИ «Электроприбор», 1998. - 370 с.
10. Анучин О.Н., Гусинский В.З., Емельянцев Г.И. Интегрированный комплекс для навигации и управления морских судов. Патент РФ №2117253, 1998.
11. Анучин О.Н., Емельянцев Г.И. Интегрированные системы ориентации и навигации для морских подвижных объектов/под общ. редакц. акад. РАН В.Г.Пешехонова /. - СПб.: ЦНИИ «Электроприбор», 2003. - 389 с.
12. Эльясберг П.Е. Введение в теорию полета ИСЗ. - М.: Наука, 1965. - 540 с.
13. Diesel, John W. Integrated inertial / GPS navigation System. Патент США №6417802 от 09.07.2002.
14. Perlmutter, Michael S. и др. Способ повышения эффективности повторного обнаружения и захвата сигнала спутника в интегрированной GPS/TNS навигационной системе. Патент США №6640189 от 28.10.2003.
15. Белов В.Д., Гунбин Т.А. и др. Комплексная инерциально-спутниковая навигационная система. Патент РФ №2087867 от 20.08.1997.
16. Волжин А.С, Вязьмикин А.А. и др. Инерциально-спутниковая навигационная система. Патент РФ №2233431 от 27.07.2004.
17. Мезенцев А.П., Ачильдиев В.М. и др. Универсальный навигационный прибор управления движением на основе микромеханических чувствительных элементов и унифицированная интегрированная бесплатформенная инерциальная навигационная система для этого прибора. Патент РФ №2263282 от 27.10.2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2015 |
|
RU2633703C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
Изобретение относится к области навигационного приборостроения. Техническим результатом изобретения является повышение точности и помехоустойчивости интегрированных систем ориентации и навигации (ИСОН), содержащей инерциальные измерительные модули (БИИМ) на «грубых» микромеханических гироскопах и миниатюрную приемную аппаратуру спутниковых навигационных систем (ПА СНС), в выработке параметров ориентации объектов управления (ОУ) на участке баллистической траектории его движения в течение длительного времени, т.е. обеспечение стационарного характера и ограниченного уровня погрешностей ИСОН в решении задачи ориентации ОУ на баллистической траектории, а также высокого уровня помехоустойчивости. Поставленная задача решается тем, что создаются условия, в которых появляется и используется существенная связь на участке баллистической траектории между моделями погрешностей БИИМ в решении задач ориентации и навигации. Данная связь появляется и может быть использована при обеспечении следующих условий: наличия быстрого вращения вокруг продольной оси и конического движения прецессии ОУ относительно центра масс или только вращения объекта вокруг продольной оси на баллистической траектории; размещении блока акселерометров БИИМ и приемной антенны СНС на некотором расстоянии (в основном по поперечной оси) от центра масс ОУ; решения задач ориентации и навигации в БИИМ в точке размещения блока акселерометров на высокой частоте - примерно на порядок больше частоты вращения ОУ (из-за необходимости выработки без искажений динамических составляющих в навигационных параметрах); формирования измеренных значений первичных навигационных параметров в ПА СНС в точке размещения приемной антенны следящими измерителями. с полосой пропускания больше частоты вращения ОУ. Кроме того, в вычислителе БИИМ формируются расчетные значения первичных навигационных параметров, которые также используются в обратной связи в ПА СНС для сужения частотной полосы в системах слежения за несущей частотой и задержкой кода. 6 ил.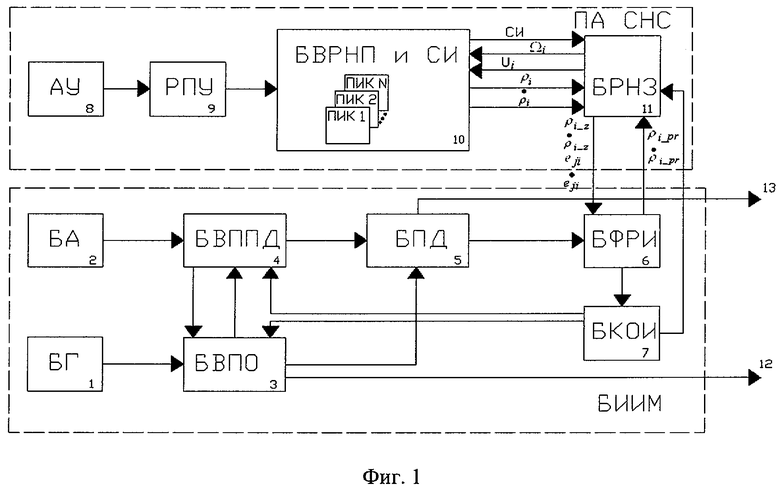
Интегрированная система ориентации и навигации для объектов, движущихся по баллистической траектории с вращением вокруг продольной оси, содержащая бескарданный инерциальный измерительный модуль (БИИМ), включающий блок гироскопов (БГ), связанный с блоком выработки параметров ориентации (БВПО), блок акселерометров (БА), связанный с блоком выработки параметров поступательного движения (БВППД), который, в свою очередь, связан с блоком пересчета данных интегрированной системы (БПД) и блоком комплексной обработки информации (БКОИ), а также приемную аппаратуру спутниковых навигационных систем ПА СНС, содержащую антенное устройство (АУ), связанное через радиоприемное устройство (РПУ) с блоком выделения радионавигационных параметров и специальной информации (БВРНПиСИ), состоящим из N независимых приемоизмерительных каналов (ПИК), и блок решения навигационных задач (БРНЗ), имеющий связи с БВРНПиСИ и БИИМ, при этом каждый ПИК блока БВРНПиСИ содержит систему слежения за несущей частотой (ССН), систему слежения за задержкой кода (ССЗ) и схему выделения специальной информации (СВСИ), причем ССН каждого ПИК включает дискриминатор, широкополосный фильтр (ФШ) и управляемый генератор (УГ), отличающаяся тем, что в состав БИИМ дополнительно введен блок формирования разностных измерений (БФРИ), первый вход которого соединен с одним из выходов блока БПД, второй вход соединен с первым выходом блока БРНЗ, первый выход блока БФРИ соединен с входом блока БКОИ, а второй выход соединен с одним из входов блока БРНЗ, второй выход которого соединен со вторым входом блока БВРНПиСИ, а в состав ССН каждого ПИК блока БВРНПиСИ дополнительно введены узкополосный фильтр (ФУ), коммутатор и сумматор, при этом вход ФУ подключен к выходу дискриминатора, выход ФУ подключен к первому входу коммутатора, второй вход коммутатора подключен к выходу ФШ, управляющий вход коммутатора подключен к управляющему выходу БРНЗ, выход коммутатора подключен к первому входу сумматора, второй вход сумматора подключен к второму информационному выходу БРНЗ, выход сумматора подключен к входу УГ, при этом блок БА БИИМ и блок АУ ПА СНС должны быть установлены на максимальном расстоянии от центра масс объекта управления (ОУ) по поперечной оси, при этом также полоса пропускания блоков БВПО, БВППД и БВРНПиСИ, БРНЗ должна быть больше частоты колебаний ОУ из-за вращения вокруг продольной оси.
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2006 |
|
RU2318188C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2310166C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2256154C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИИ И НАВИГАЦИИ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2003 |
|
RU2256881C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2309385C2 |
| US 5054719 A, 08.10.1991. | |||

