Изобретение относится к метеорологическим приборам, оценивающим ночную прозрачность атмосферы и соответственно состояние облачности в ночное и сумеречное время во всей небесной полусфере и обеспечивающим работу наземных оптических средств и астрономических установок, осуществляющих наблюдение искусственных и естественных небесных тел в автоматическом режиме.
Известны датчики облачности, содержащие метеорологический лазер, объектив, приемник излучения, механизм наведения с приводами и датчиками положения осей [см. Зуев В.Е. Лазер-метеоролог. Л.: Гидрометеоиздат, 1974, стр.96-112; Vaisala LD-40 Ceilometer. Рекламный листок. Фирма VAISALA (Финляндия), www.vaisala.com]. Наличие в составе датчика метеорологического лазера усложняет его конструкцию и повышает энергопотребление. Датчик хорошо работает по низковысотной составляющей облачного покрова, важной для авиации, при контроле высоких облаков его работоспособность снижается.
Наиболее близким аналогом к заявляемому техническому решению является устройство [см. Комаров В.В., Фоменко А.Ф., Шергин B.C. ТВ-система «ВСЕ НЕБО» для мониторинга ночной облачности. «Прикладная физика», 2007, №5, стр.130-133], осуществляющее контроль состояния ночной облачности в реальном времени во всей небесной полусфере. Устройство содержит расположенные последовательно на визирной оси объектив с полем зрения 180° и высокочувствительную телевизионную камеру (ТВ-камеру), помещенные в корпус. Видеосигнал с ТВ-камеры поступает на вход блока накопления кадров, где из него вычитается темновой фон и исключаются геометрические искажения. Полученное телевизионное изображение, содержащее информацию о протяженных объектах (например, облаках, подсвеченных Луной), и точечных объектах (телевизионных звездах), поступает в формирователь видеосюжета, где на него накладываются изображения координатной сетки, конфигурации созвездий и положение основных звезд из блока запоминания звездного каталога. Информация об облаках, телевизионных звездах с наложенной сеткой, каталожными созвездиями и основными каталожными звездами выводится на экран дисплея. Оценку ночной облачности производит оператор визуально с учетом своего знания, опыта и других личностных факторов.
Обязательное участие оператора в оценке ночной облачности вносит элемент субъективности и снижает точность оценки. Кроме того, наметившийся в астрономии переход на «интеллектуальные» телескопы и «телескопы-роботы» минимизирует или полностью исключает участие человека в астрономических наблюдениях. Это снижает возможности применения известного устройства в автоматических средствах.
Задачей заявляемого изобретения является создание прибора, способного формировать данные о зонах облачности ночного неба без участия оператора.
Технический результат - обеспечение работы датчика в автоматическом режиме, повышение объективности и точности оценки ночной облачности.
Это достигается тем, что датчик ночной облачности, содержит расположенные последовательно на визирной оси объектив и телевизионную камеру и, вне визирной оси, блок запоминания звездного каталога. Выход камеры связан с входом блока накопления кадров и вычитания фона. Датчик снабжен формирователем телевизионного массива звезд, формирователем каталожного массива звезд, блоком отождествления звезд, вычислителем прозрачности атмосферы и формирователем зон облачности. Выход блока накопления кадров и вычитания фона связан с входом формирователя телевизионного массива звезд. Выход блока запоминания звездного каталога связан с входом формирователя каталожного массива звезд. Выходы формирователей телевизионного и каталожного массивов звезд соединены с входами блока отождествления звезд. Блок отождествления звезд подключен к вычислителю прозрачности атмосферы, выход которого соединен с формирователем зон облачности.
На фиг.1 схематично изображен датчик ночной облачности, на фиг.2 - временная диаграмма сигналов на выходе ТВ-камеры и блока накопления кадров и вычитания фона, на фиг.3 - фрагменты сюжетов: а) на выходе формирователя телевизионного массива звезд, б) на выходе формирователя каталожного массива звезд, в) на выходе блока отождествления звезд, г) на выходе вычислителя коэффициента ночной прозрачности атмосферы, д) на выходе формирователя зон облачности.
Датчик ночной облачности содержит расположенные на визирной оси объектив 1, например, типа «рыбий глаз» (фиг.1) и ТВ-камеру 2, например, типа Peregrine 486 BI, реализованную на ПЗС-матрице формата 4096×4096 при размере пикселя 15×15 мкм. Объектив и ТВ-камера установлены в корпусе 3. К выходу ТВ-камеры 2 подключен блок накопления кадров и вычитания фона 4, к выходу блока 4 подключен формирователь телевизионного массива звезд 5. Кроме того, вне визирной оси, в датчике имеется блок 6 запоминания звездного каталога. Блок 6 своим выходом подключен к формирователю 7 каталожного массива звезд. Выходы формирователей 5 и 7 соединены со входами блока 8 отождествления звезд, который в свою очередь подключен к вычислителю прозрачности атмосферы 9, выход которого соединен с формирователем зон облачности 10. Формирователи 5, 7, 10, блоки 6, 8, вычислитель 9 могут быть выполнены, например, на базе программируемых логических интегральных схем (ПЛИСов).
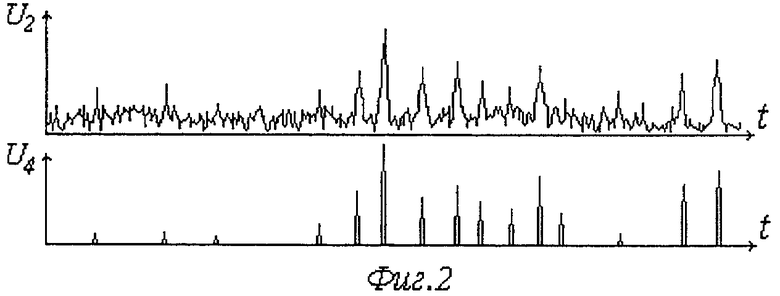
На фиг.2 приняты следующие обозначения: U2 - сигналы на выходе ТВ-камеры 2, U4 - сигналы на выходе блока накопления кадров и вычитания фона 4, где t - текущее время.
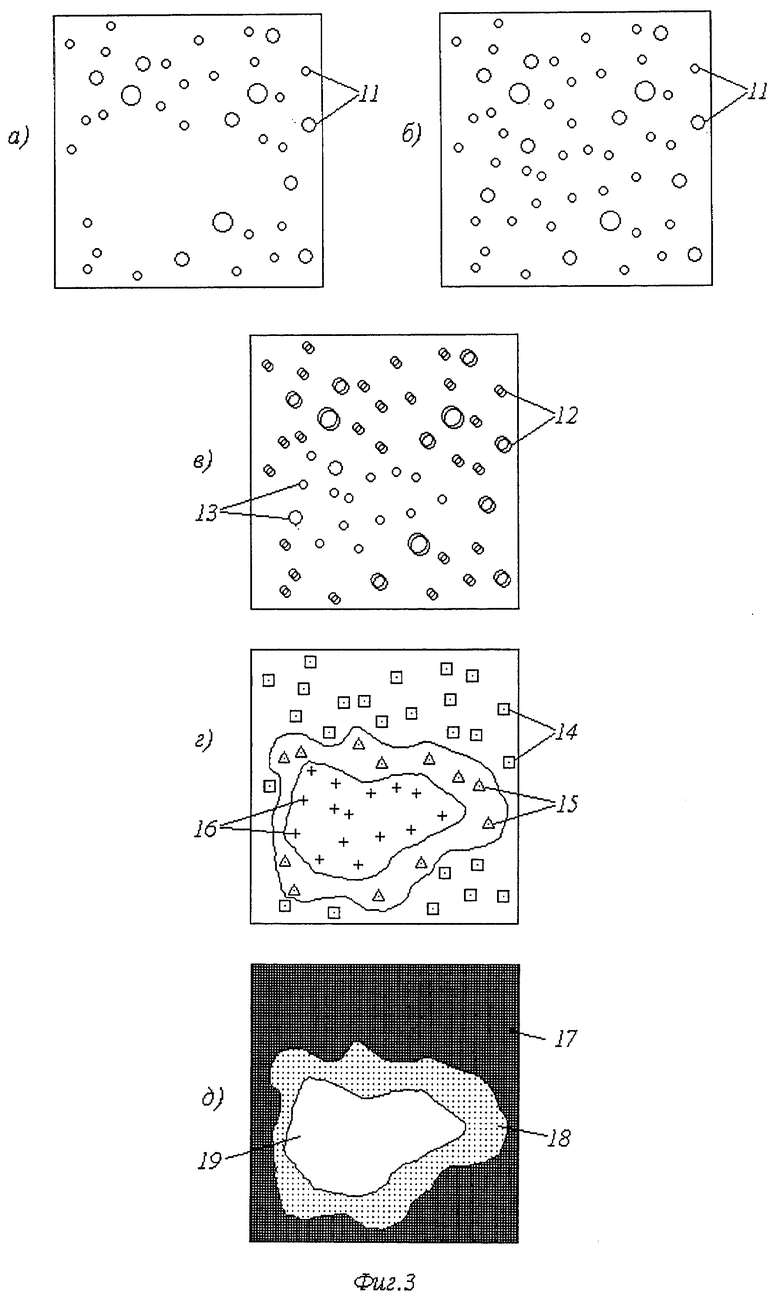
На фиг.3 приняты следующие обозначения: 11 - изображения телевизионных и каталожных звезд на выходе формирователей 5, 7; 12 - изображения отождествившихся звезд на выходе блока 8; 13 - изображения неотождествившихся звезд на выходе блока 8; 14 - точки (направления) на небесной сфере, в которых прозрачность атмосферы не ослаблена облачностью; 15 - точки на небесной сфере, в которых прозрачность атмосферы частично ослаблена облачностью; 16 - точки на небесной сфере, в которых из-за сильной облачности атмосфера непрозрачна; 17 - зона без облачности; 18 - зона со слабой облачностью; 19 - зона с сильной облачностью.
Датчик работает следующим образом. Объектив 1 формирует оптическое изображение небесной полусферы на входе ТВ-камеры 2. С выхода ТВ-камеры 2 поступают телевизионные сигналы U2, содержащие сигналы от космических объектов (звезды, планеты и др.), сигналы от распределенного фона (лунный, сумеречный и др.) и помехи (тепловые шумы, шумы считывания и др.). В блоке 4 эти сигналы накапливаются и обрабатываются, из них вычитается темновой фон. Обработанные сигналы U4 поступают на вход формирователя 5, где исключаются сигналы от протяженных объектов и формируется телевизионный массив обнаруженных звезд, например, в виде списка или в виде сюжетов, как показано на фиг.3. Массив содержит привязанную ко времени информацию об измеренных небесных координатах звезд и их измеренном блеске (в пространственном виде информация о телевизионных звездах представлена в сюжете 3а). Одновременно в формирователе каталожного массива звезд 7 на основании данных, поступающих из блока 6, для этого же момента времени формируется каталожный массив звезд, например, также в виде списка. Массив содержит информацию о каталожных небесных координатах звезд и их каталожном блеске (сюжет 3б). При этом в каталожный массив отбираются только те звезды, блеск которых не меньше чувствительности датчика на момент получения телевизионного массива. Сюжеты 3а и 3б подаются в блок 8, где производится отождествление звезд. Отождествление выполняется, например, за счет сравнения измеренных и каталожных небесных координат звезд. Если разница в измеренных и каталожных небесных координатах не превышает заданный порог, то телевизионная звезда отождествляется с данной каталожной звездой (сюжет 3в).
Информация об отождествившихся парах звезд и неотождествившихся каталожных звездах поступает в вычислитель 9, где, например, путем сравнения измеренного и каталожного блесков вычисляется коэффициент ночной прозрачности атмосферы в направлении отождествившихся каталожных звезд. В направлении неотождествившихся каталожных звезд коэффициент ночной прозрачности атмосферы принимается равным нулю. В сюжете 3г коэффициент ночной прозрачности атмосферы kн разбит на три градации: kн=0,7 (облака отсутствуют), kн=0,07 (слабая облачность), kн=0 (сильная облачность). На практике количество и значение градаций выбирают в зависимости от конкретной решаемой задачи. С вычислителя 9 сигналы поступают в формирователь зон ночной облачности 10. В формирователе через граничные точки, например, с одинаковым коэффициентом прозрачности либо через вновь вычисленные точки (в сюжете 3д не показаны) проводятся изолинии. Вновь вычисленные точки могут представлять собой, например, середины отрезков, соединяющих обмеренные точки с разными коэффициентами прозрачности, т.е изолиния проводится посередине между этими точками.
Информация о ночной прозрачности атмосферы и зонах облачности, полученная без участия оператора, может быть использована для автоматического управления оптическим средством или астрономическим телескопом.
Таким образом, наличие в датчике ночной облачности новых блоков и новых связей между блоками по сравнению с известными позволяет обеспечить работу датчика в автоматическом режиме, повышает объективность и точность оценки ночной облачности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ОБЛАЧНОСТИ НОЧНОЙ АТМОСФЕРЫ И ДАТЧИК НОЧНОЙ ОБЛАЧНОСТИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2678950C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| АСТРОНОМИЧЕСКИЙ КОРРЕКТОР КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2000 |
|
RU2207305C2 |
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |
| Космическая система обзора небесной сферы для обнаружения небесных тел | 2015 |
|
RU2621464C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2686453C1 |
| Система калибровки и тестирования звездного датчика ориентирования | 2023 |
|
RU2811666C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ЗВЕЗДАМ И ДЛИТЕЛЬНОГО ПОДДЕРЖАНИЯ ПОВЫШЕННОЙ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ИХ РЕАЛИЗАЦИИ | 2014 |
|
RU2585179C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ИЗОБРАЖЕНИЯМ УЧАСТКОВ ЗВЕЗДНОГО НЕБА | 2016 |
|
RU2638077C1 |
| Устройство определения ориентации объекта по звездам с расщепленным полем зрения | 2022 |
|
RU2796578C1 |
Изобретение относится к метеорологическим приборам и может быть использовано для обеспечения работы наземных оптических средств и астрономических установок в автоматическом режиме. Устройство содержит объектив, телевизионную камеру, блок накопления кадров и вычитания фона, блок запоминания звездного каталога. В датчик дополнительно введены формирователь телевизионного массива звезд, формирователь каталожного массива звезд, блок отождествления звезд, вычислитель прозрачности атмосферы, формирователь зон облачности. Вычисление ночной прозрачности атмосферы осуществляется с помощью отождествления блеска телевизионных и каталожных звезд. Технический результат - обеспечение работы датчика в автоматическом режиме, повышение объективности и точности оценки ночной облачности. 3 ил.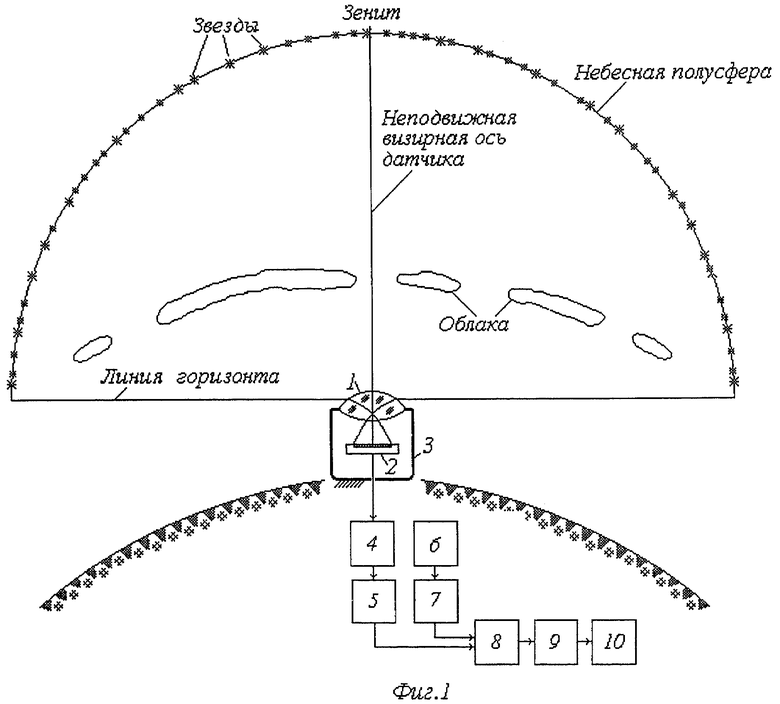
Датчик ночной облачности, содержащий расположенные последовательно на визирной оси объектив и телевизионную камеру, выход которой связан с входом блока накопления кадров и вычитания фона и, вне визирной оси, блок запоминания звездного каталога, отличающийся тем, что датчик снабжен формирователем телевизионного массива звезд, формирователем каталожного массива звезд, блоком отождествления звезд, вычислителем прозрачности атмосферы и формирователем зон облачности, причем выход блока накопления кадров и вычитания фона связан с входом формирователя телевизионного массива звезд, а выход блока запоминания звездного каталога со входом формирователя каталожного массива звезд, а выходы формирователей телевизионного и каталожного массивов звезд соединены со входами блока отождествления звезд, который, в свою очередь, подключен к вычислителю прозрачности атмосферы, выход которого соединен с формирователем зон облачности.
| JP 2002156466 А, 31.05.2002 | |||
| WO 2006071536 A1, 06.07.2006 | |||
| JP 2007127692 A, 24.05.2007 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВИДИМОСТИ И МИКРОСТРУКТУРЫ АТМОСФЕРНЫХ ОБРАЗОВАНИЙ | 1996 |
|
RU2110082C1 |

