Изобретение относится к метеорологическим приборам и может быть использовано для оценки в автоматическом режиме ночной прозрачности атмосферы и, соответственно, состояния облачности в ночное и сумеречное время во всей небесной полусфере, обеспечивая работу наземных оптических средств и астрономических установок, осуществляющих наблюдение искусственных и естественных небесных тел.
Известен способ краткосрочного прогнозирования типа облачности и вида небосвода над местностью наблюдения и устройство для его осуществления, описанные в патенте РФ №2167441, МПК G01W 1/02, G01W 1/10, опубликованном 20.05.2001 г. Способ основан на метеообработке результатов измерения метеорологической величины атмосферного давления. Прогноз типа облачности выполняется без участия оператора.
Однако применение этого способа дает прогноз характера облачности без указания зон, свободных от облаков, а перед прогнозом требуется визуальное наблюдение и выбор наблюдателем вида небосвода с соответствующей облачностью из упорядоченной матрицы видов небосводов, хранящейся в памяти компьютера, которая близка картинке небосвода, наблюдаемой наблюдателем в данный момент над местностью.
Известен также способ, реализованный в телевизионной системе, которая осуществляет контроль состояния ночной облачности в реальном времени во всей небесной полусфере, опубликованный в книге Комаров В.В., Фоменко А.Ф., Шергин B.C. ТВ-система «Все небо» для мониторинга ночной облачности. «Прикладная физика», 2007, №5, стр. 130-133. Система формирует видеоизображение небосвода, накладывает на него изображения координатной сетки, конфигурации созвездий и положение основных звезд, используя звездный каталог FK5. Информация об облаках, звездах с наложенной сеткой, каталожными созвездиями и основными каталожными звездами выводится на экран дисплея. Оценку ночной облачности, выделение зон, свободных от облаков, производит оператор визуально с учетом своего знания, опыта и других личностных факторов. Система не решает задачу краткосрочного прогноза изменения положения и размеров зон, свободных от облаков. Обязательное использование звездного каталога, размещаемого в памяти компьютера, отсутствие по причине человеческого фактора краткосрочного прогноза изменения положения и размеров зон, свободных от облаков, для обеспечения работы наземных оптических астрономических средств ограничивают возможности применения известного устройства и заложенного в нем способа выделения зон, свободных от облаков.
Известны датчики облачности, содержащие метеорологический лазер, объектив, приемник излучения, механизм наведения с приводами и датчиками положения осей, опубликованные в издании Зуева В.Е. Лазер-меторолог. Гидрометеоиздат, Л., 1974, стр. 96-112., Vaisala LD-40 Ceilometer, а также в рекламном листке фирмы VAISALA (Финляндия), ссылка в сети Интернет www.vaisala.com. Датчик хорошо работает по низковысотной составляющей облачного покрова, важной для авиации, при контроле высоких облаков его работоспособность снижается. Однако наличие в составе датчика метеорологического лазера усложняет его конструкцию и повышает энергопотребление.
Наиболее близким аналогом к заявляемому техническому решению является датчик ночной облачности, описанный в патенте РФ №2436133, МПК G01W 1/04, опубликованном 10.12.2011 г. Датчик работает в автоматическом режиме и содержит оптический блок, внутри которого последовательно на визирной оси расположены объектив и телевизионная камера так, что выход объектива связан с входом телевизионной камеры, блок накопления кадров и вычитания фона, формирователь телевизионного массива звезд, установленные так, что выход объектива связан с входом блока накопления кадров и вычитания фона, выход которого присоединен ко входу формирователя телевизионного массива звезд. Вне визирной оси установлен блок запоминания звездного каталога. Также датчик снабжен формирователем каталожного массива звезд, блоком отождествления звезд, вычислителем прозрачности атмосферы и формирователем зон облачности. Выход блока накопления кадров и вычитания фона связан с входом формирователя телевизионного массива звезд. Выход блока запоминания звездного каталога связан с входом формирователя каталожного массива звезд. Выходы формирователей телевизионного и каталожного массивов звезд соединены со входами блока отождествления звезд. Блок отождествления звезд подключен к вычислителю прозрачности атмосферы, выход которого соединен с формирователем зон облачности.
Однако необходимость наличия блока запоминания звездного каталога, формирователя каталожного массива звезд и блока отождествления звезд требует соответствующих объемов памяти и вычислительных ресурсов, что усложняет конструкцию и снижает надежность.
Задачей заявляемого изобретения является обеспечение автоматического выделения зон, свободных от облаков, и зон облачности более простым путем, увеличение функциональных возможностей и упрощение конструкции датчика ночной облачности, повышение надежности его работы при сохранении объективности и точности оценки ночной облачности.
Технический результат - создание способа оценки ночной атмосферы и датчика ночной облачности, реализующего этот способ с функцией определения положения и размеров зон облачности и прогнозом их изменения без использования каталога звезд, а также способного определять тип облачности путем сравнения с эталонами облачности при сохранении объективности и точности оценки ночной облачности.
Это достигается тем, что в способе оценки облачности ночной атмосферы, заключающемся в формировании цифрового изображения всей небесной полусферы над местностью наблюдения, обработке изображений, оценке ночной облачности и выделении зон, свободных от облаков, в отличие от известного, производят математическую обработку цифрового изображения, с помощью которой выделяют зоны неба, свободные от облаков, и зоны облачности, используя при этом плотность изображений звезд на фотоприемнике, затем проводят краткосрочный прогноз изменения положения и размеров облаков и зон неба, свободных от облаков, при котором регистрируют последовательность во времени цифровых изображений неба с занесением в банк данных, который находится в блоке памяти, и затем распознают тип облачности по эталонам облачности, которые также хранятся в блоке памяти, при этом прогноз изменения и распознавание типа облачности выполняют автоматически по ряду оптических изображений небосвода.
Это также достигается тем, что в датчик ночной облачности, содержащий оптический блок, внутри которого последовательно на визирной оси расположены объектив и телевизионная камера так, что выход объектива связан с входом телевизионной камеры, блок накопления кадров и вычитания фона, формирователь телевизионного массива звезд, установленные так, что выход оптического блока связан с входом блока накопления кадров и вычитания фона, выход которого присоединен к входу формирователя телевизионного массива звезд, в отличие от известного, дополнительно введены блок памяти с находящимися в нем банком данных телевизионных кадров и банком эталонов облачности, а также вычислитель, выявляющий зоны прозрачности атмосферы, зоны облачности и тип облачности, установленные таким образом, что первый выход формирователя телевизионного массива звезд связан с входом блока памяти, второй выход формирователя телевизионного массива звезд связан с первым входом вычислителя, а второй вход вычислителя присоединен к выходу блока памяти.
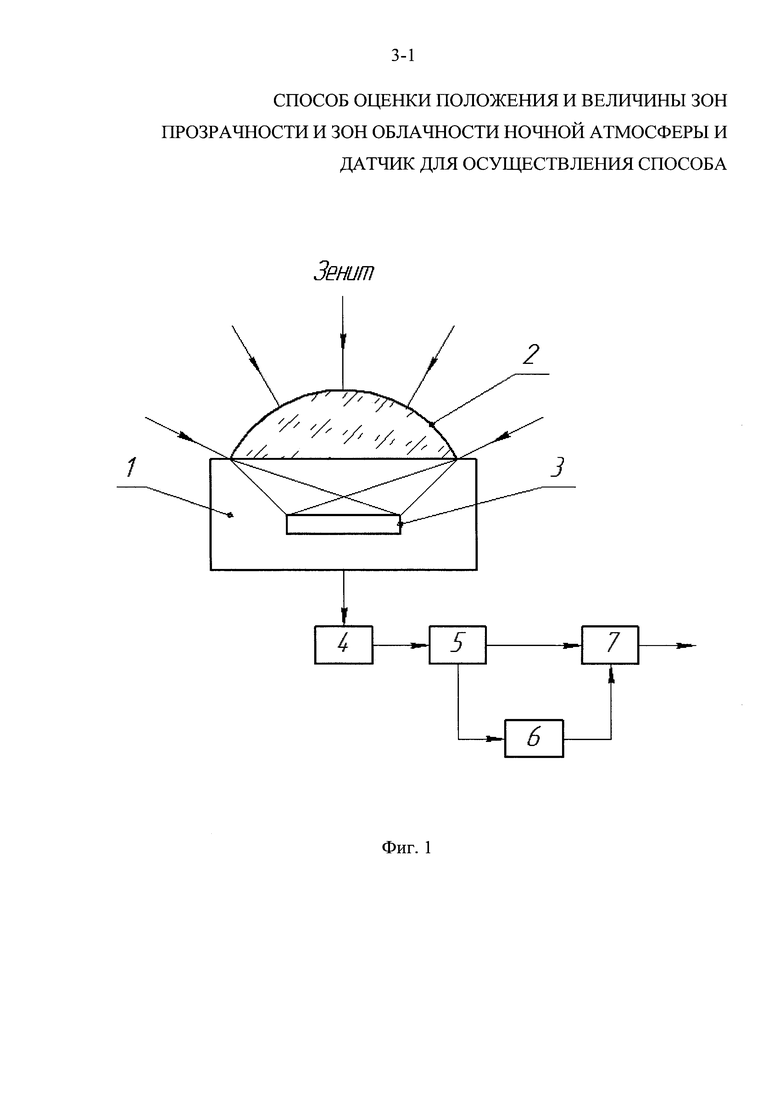
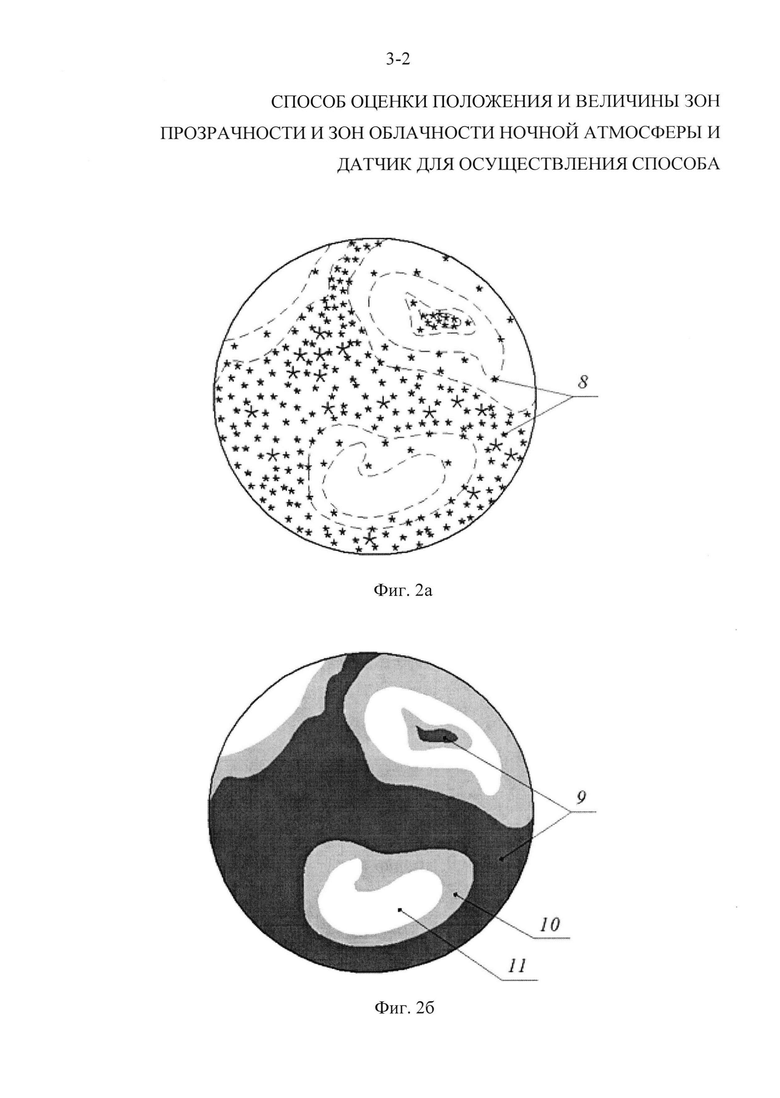
Предлагаемый способ используется в датчике ночной облачности, схематично изображенном на фиг. 1. На фиг. 2 представлены различные фрагменты сюжетов наблюдаемого участка ночного неба.
Способ оценки облачности ночной атмосферы заключается в том, что сначала строят цифровое изображение небосвода над местностью наблюдения, содержащее информацию о зонах прозрачности и зонах облачности, включая информацию о звездах и протяженных объектах, таких как облака, подсвеченные Луной и огнями поселений. Для получения цифрового изображения небосвода используют цифровую телевизионную камеру, состыкованную в одну сборку с широкоугольным объективом, например типа рыбий глаз, с визирной осью, направленной в зенит, которая выполняет с интервалом времени Δt прием и преобразование оптического изображения небесной полусферы, формируемого объективом, в видеосигналы цифрового формата с применением двойной коррелированной выборки для уменьшения шумов, коррекцией неоднородностей и аналогово-цифровое преобразование сигналов. Далее выполняют пороговую обработку изображения и вычитание темнового фона из полученного цифрового изображения (телевизионного кадра). Для этого используют регулируемое накопление телевизионных кадров, селекцию пикселей по пороговому значению яркости - пороговая обработка, определение шумовой составляющей сигнала и вычитание темнового фона. Пиксели, яркость которых превышает порог, не участвуют в дальнейшей обработке. Затем формируют телевизионный массив звезд за счет селекции изображений звезд по пороговому значению количества пикселей для каждого связного образования в телевизионном кадре, в результате чего исключают сигналы от протяженных объектов, а оставшиеся сигналы от связных компонент - звезд обрабатывают и вычисляют их координаты в системе координат фотоприемника и блеск, привязанные ко времени. Сформированный телевизионный массив звезд передают на накопление в банке данных блока памяти, где образуется последовательность во времени телевизионных кадров небосвода. Одновременно телевизионный массив звезд передают на дальнейшую математическую обработку в вычислительное устройство, где определяют зоны, содержащие звезды, т.е. зоны прозрачности, и зоны не содержащие таковых, т.е. зоны облачности, для чего по телевизионному массиву звезд вычисляют плотность изображений звезд на фотоприемнике и выделяют зоны, имеющие разную плотность, т.е. разную прозрачность атмосферы. Вычисляются площади зон прозрачности атмосферы и зон облачности. Далее вычисляют направление и скорость движения облаков в азимутальной или другой системе координат по нескольким телевизионным кадрам с использованием накопленной последовательности телевизионных кадров, привязанных ко времени, из банка данных блока памяти. Можно использовать для прогнозирования параметров зон прозрачности и зон облачности скользящее среднее, применяя формулу:
Y(t+1)=(1/(T+1))*[Y(t)+Y(t-1)+…+Y(t-T)],
где Y - размер, координаты центра тяжести фигуры зоны и др.;
t - текущее время;
Т - количество отсчетов.
В этом случае анализируется только ближайшее прошлое на Т отсчетов по времени в глубину и, основываясь только на этих данных, строится прогноз.
Затем, используя вычисленные параметры зон прозрачности и зон облачности, осуществляют распознавание типа облачности по текстурным признакам различных типов облачности, при этом результат сравнивают с записанными в блоке памяти эталонами, созданными в соответствии, например, с атласом облаков, опубликованном в издательстве «Международный атлас облаков и состояний неба», издание 2-е, расширенное, под редакцией А.Ф. Дюбука, Гидрометеорологическое издательство, Москва, 1940 г. Эталоны содержат небосводы с соответствующей облачностью различных видов и форм, от абсолютной прозрачности до отсутствия прозрачности, или от 0 до 10 баллов и соответствующие трем различным типам облаков - облака верхнего, среднего и нижнего ярусов. Параметры зон прозрачности и зон облачности, тип облачности над местностью наблюдения передаются потребителям с привязкой к месту наблюдения и времени.
На фиг. 1 представлена конструкция датчика ночной облачности, содержащего оптический блок 1, внутри которого последовательно на визирной оси расположены объектив 2 и телевизионная камера 3 так, что выход объектива 2 связан с входом телевизионной камеры 3, блок накопления кадров и вычитания фона 4, формирователь телевизионного массива звезд 5, блок памяти 6 с находящимися в нем банком данных телевизионных кадров и банком эталонов облачности (на фиг. не указаны), а также вычислитель 7, способный определять зоны прозрачности атмосферы, зоны облачности и тип облачности. Выход оптического блока 1 связан с входом блока накопления кадров и вычитания фона 4, выход которого связан с входом формирователя телевизионного массива звезд 5. Первый выход формирователя телевизионного массива звезд 5 связан с входом блока памяти 6, второй выход формирователя телевизионного массива звезд 5 связан с первым входом вычислителя 7, а второй вход вычислителя связан с выходом блока памяти 6.
На фиг. 2а представлен фрагмент сюжета на выходе формирователя телевизионного массива звезд 5, на фиг. 2б представлен фрагмент сюжета на выходе вычислителя зон прозрачности атмосферы и зон облачности 7. Изображения 8 телевизионных звезд на выходе формирователя телевизионного массива звезд 5 от разных участков небесной полусферы означают, что чем меньше плотность изображений, тем меньше прозрачность атмосферы и выше облачность. Также отмечена зона без облачности 9, зона со слабой облачностью 10 и зона с сильной облачностью 11.
Датчик ночной облачности работает следующим образом. В оптическом блоке 1 объектив 2 формирует оптическое изображение небесной полусферы на входе телевизионной камеры 2. С выхода телевизионной камеры 2 на вход блока накопления кадров и вычитания фона 4 поступают цифровые телевизионные сигналы, содержащие сигналы от космических объектов, в том числе звезд, планет и др., а также сигналы от распределенного фона - лунный, сумеречный и др., и помехи - тепловые шумы, шумы считывания и др. В блоке накопления кадров и вычитания фона 4 эти сигналы накапливаются и обрабатываются, из них вычитается темновой фон. Обработанные сигналы с выхода блока накопления кадров и вычитания фона 4 поступают на вход формирователя телевизионного массива звезд 5, где исключаются сигналы от протяженных объектов и формируется телевизионный массив обнаруженных звезд. Массив содержит привязанную ко времени информацию об измеренных телевизионных координатах звезд и их измеренном блеске, в пространственном виде информация о телевизионных звездах представлена на фиг. 2а. Далее информация об измеренных телевизионных координатах звезд с первого выхода формирователя телевизионного массива звезд 5 поступает на первый вход блока памяти 6. Со второго выхода формирователя телевизионного массива звезд 5 и с выхода блока памяти 6 информация поступает на вход вычислителя 7, где формируются зоны, содержащие звезды - зоны прозрачности, и зоны, не содержащие таковых - зоны облачности. Вычисляются площади зон прозрачности атмосферы и зон облачности. По нескольким телевизионным кадрам с использованием данных из блока памяти 6 определяются направление и скорость движения облаков. Далее определяется тип облачности сравнением вычисленных информативных признаков облаков с эталонными текстурными признаками различных типов облачности, записанными в блоке памяти. С выхода вычислителя 7 обработанная информация поступает потребителям.
На практике настройка датчика ночной облачности осуществляется по плотности изображений измеренных датчиком звезд - облака отсутствуют, слабая облачность, сильная облачность, в зависимости от конкретной решаемой задачи с занесением результатов настройки в блок памяти 6.
Информативные признаки различных эталонов облачности записываются в блок памяти заранее согласно принятому в метеорологии стандарту. Для каждого типа облаков могут быть индивидуальные наборы информативных признаков. При работе классификация различных типов облачности осуществляется автоматически.
Все элементы, входящие в датчик ночной облачности, являются известными. В качестве объектива 2 может быть использован, например, объектив типа «рыбий глаз» (фиг. 1), телевизионная камера 2 может быть оптического формата 35 мм, и реализована на ПЗС-матрице типа CMV20000 с разрешением 5120×3840, размером пикселя 6.4×6.4 мкм или CHR70M с разрешением 10000×7096, размером пикселя 3.1×3.1 мкм. Формирователь телевизионного массива звезд 5 и вычислитель зон прозрачности атмосферы и зон облачности 7 могут быть выполнены, например, на базе программируемых логических интегральных схем - ПЛИСов.
Информация о ночной прозрачности атмосферы и зонах облачности, полученная без участия оператора, без машинного каталога звезд, может быть использована для автоматического управления оптическим средством или астрономическим телескопом. Наличие в датчике ночной облачности блока памяти 6 увеличивает его функциональные возможности: позволяет выполнять краткосрочный прогноз изменения положения и размеров облаков и зон неба, свободных от облаков, и определять тип облачности по эталонам облачности, хранимым в ней. Исключение при обеспечении работы датчика в автоматическом режиме блока запоминания звездного каталога, формирователя каталожного массива звезд и блока отождествления звезд, по сравнению с известными техническими решениями, позволяет упростить конструкцию, повысить надежность его работы.
Таким образом, в результате предложенных технических решений обеспечено получение технического результата: создан способ оценки ночной атмосферы и датчик ночной облачности, реализующий этот способ с функцией определения положения и размеров зон облачности и прогнозом их изменения без использования каталога звезд, а также способного определять тип облачности путем сравнения с эталонами облачности при сохранении объективности и точности оценки ночной облачности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК НОЧНОЙ ОБЛАЧНОСТИ | 2009 |
|
RU2436133C2 |
| СПОСОБ КРАТКОСРОЧНОГО ПРОГНОЗИРОВАНИЯ ОБЛАЧНОСТИ И ВИДА НЕБОСВОДА НАД МЕСТНОСТЬЮ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2167441C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАЛЛА ОБЛАЧНОСТИ | 2012 |
|
RU2525625C2 |
| СПОСОБ САМОКОНТРОЛЯ ВИЗУАЛЬНОЙ ЗАМЕТНОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2221209C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСОКОНУСНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2415053C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЩЕГО БАЛЛА ОБЛАЧНОСТИ НА ОСНОВЕ ПРЯМЫХ ЦИФРОВЫХ ШИРОКОУГОЛЬНЫХ СНИМКОВ ВИДИМОЙ ПОЛУСФЕРЫ НЕБА | 2015 |
|
RU2589463C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ТЕПЛОВЫХ ОБЪЕКТОВ НА МАСКИРУЮЩЕМ АТМОСФЕРНОМ ФОНЕ | 2011 |
|
RU2480780C1 |
| СПОСОБ ФОРМИРОВАНИЯ КАТАЛОГА НЕБЕСНЫХ ОБЪЕКТОВ ИЗ БОЛЬШИХ МАССИВОВ АСТРОНОМИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2659493C1 |
| Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне | 2015 |
|
RU2634374C2 |
Группа изобретений относится к метеорологическим приборам. Способ оценки облачности ночной атмосферы, реализуемый с помощью датчика ночной области, заключается в формировании цифрового изображения всей небесной полусферы над местностью наблюдения, обработке изображений, оценке ночной облачности и выделении зон, свободных от облаков. Производят математическую обработку цифрового изображения, с помощью которой выделяют зоны неба, свободные от облаков, и зоны облачности, используя при этом плотность изображений звезд на фотоприемнике. Проводят краткосрочный прогноз изменения положения и размеров облаков и зон неба, свободных от облаков, при котором регистрируют последовательность во времени цифровых изображений неба с занесением в банк данных, который находится в блоке памяти. Распознают тип облачности по эталонам облачности, которые также хранятся в блоке памяти, при этом прогноз изменения и распознавание типа облачности выполняют автоматически по ряду оптических изображений небосвода. Технический результат заключается в создании способа оценки ночной атмосферы и датчика ночной облачности, реализующего этот способ, с функцией определения положения и размеров зон облачности и прогнозом их изменения без использования каталога звезд, а также способного определять тип облачности путем сравнения с эталонами облачности при сохранении объективности и точности оценки ночной облачности. 2 н.п. ф-лы. 3 ил.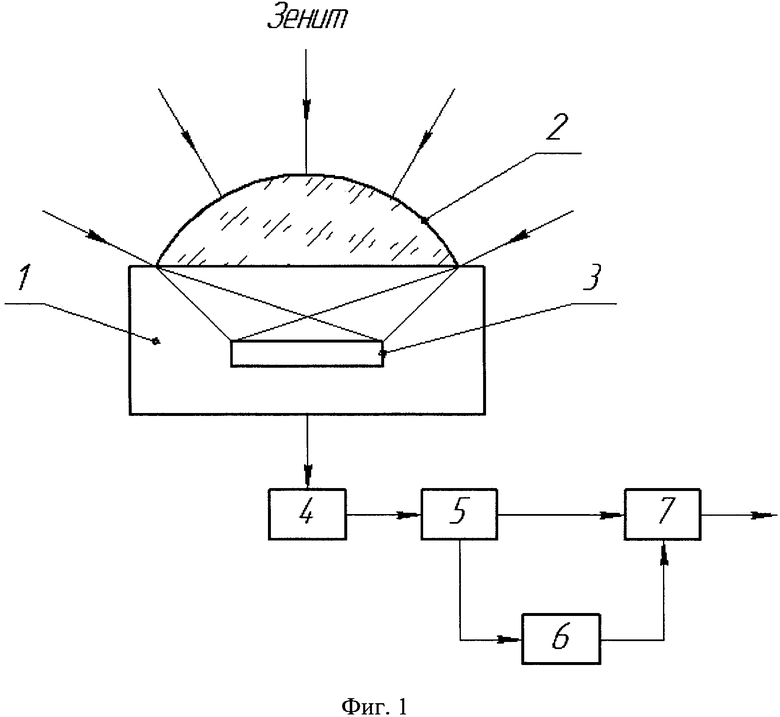
1. Способ оценки облачности ночной атмосферы, заключающийся в формировании цифрового изображения всей небесной полусферы над местностью наблюдения, обработке изображений, оценке ночной облачности и выделении зон, свободных от облаков, отличающийся тем, что производят математическую обработку цифрового изображения, с помощью которой выделяют зоны неба, свободные от облаков, и зоны облачности, используя при этом плотность изображений звезд на фотоприемнике, затем проводят краткосрочный прогноз изменения положения и размеров облаков и зон неба, свободных от облаков, при котором регистрируют последовательность во времени цифровых изображений неба с занесением в банк данных, который находится в блоке памяти, и затем распознают тип облачности по эталонам облачности, которые также хранятся в блоке памяти, при этом прогноз изменения и распознавание типа облачности выполняют автоматически по ряду оптических изображений небосвода.
2. Датчик ночной облачности для осуществления данного способа, содержащий оптический блок, внутри которого последовательно на визирной оси расположены объектив и телевизионная камера так, что выход объектива связан с входом телевизионной камеры, блок накопления кадров и вычитания фона, формирователь телевизионного массива звезд, установленные так, что выход оптического блока связан с входом блока накопления кадров и вычитания фона, выход которого присоединен к входу формирователя телевизионного массива звезд, отличающийся тем, что дополнительно введены блок памяти с находящимися в нем банком данных телевизионных кадров и банком эталонов облачности, а также вычислитель, выявляющий зоны прозрачности атмосферы, зоны облачности и тип облачности, установленные таким образом, что первый выход формирователя телевизионного массива звезд связан с входом блока памяти, второй выход формирователя телевизионного массива звезд связан с первым входом вычислителя, а второй вход вычислителя присоединен к выходу блока памяти.
| ДАТЧИК НОЧНОЙ ОБЛАЧНОСТИ | 2009 |
|
RU2436133C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ТЕПЛОВЫХ ОБЪЕКТОВ НА СЛОЖНОМ АТМОСФЕРНОМ ФОНЕ | 2011 |
|
RU2461017C1 |
| Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне | 2015 |
|
RU2634374C2 |
| US 6208938 B1, 27.03.2001. | |||

