Область техники, к которой относится изобретение
Изобретение относится к космической технике и может быть использовано для оперативного точного определения ориентации космических аппаратов (КА) относительно инерциальной системы координат по наблюдениям звезд.
Уровень техники
Современный звездный датчик ориентации (далее - ЗД) состоит из бленды, оптической системы и матричного приемника излучения, составляющих оптическую головку, и блока электроники. Такая схема ЗД практически полностью вытеснила использовавшиеся ранее. ЗД может иметь одну или несколько оптических головок, в зависимости от технических характеристик, необходимых для достижения поставленной задачи.
Известной общей проблемой звездных датчиков описанного типа с одной оптической головкой являются различные погрешности определения углов Эйлера [1]. Углы прецессии и нутации, задающие направление оси визирования объектива звездного датчика, определяются с одинаковой погрешностью, а угол разворота вокруг оси визирования определяется с погрешностью σZ, которая в несколько раз больше. Отношение этих погрешностей σXY/σZ примерно равно ширине поля зрения оптической системы звездного датчика, выраженной в радианах [2].
Из уровня техники известно решение прибор для звездной ориентации Hydra фирмы Sodern (Франция), в который содержит от 2 до 4 оптических головок и один общий блок обработки данных [3].
Этот звездный датчик при одновременной работе нескольких оптических головок и совместной обработке получаемых ими изображений звездного неба обеспечивает определение всех трех углов Эйлера с близкими по величине погрешностями порядка 1,5'' [4].
Однако, как и все звездные датчики с несколькими оптическими головками, он дороже, обладает большой массой и габаритами, потребляет много энергии и требует больших вычислительных мощностей для обработки изображений. Кроме того, несколько оптических головок при одновременном их функционировании снижают надежность звездного датчика (возможность возникновения систематических ошибок, связанных с изменением взаимного положения оптических головок под действием тепловых деформаций и механических воздействий).
Наиболее близким по технической сущности к заявляемому решению изобретению и выбранный в качестве прототипа является устройство для определения ориентации объекта по звездам с одной оптической головкой [5], содержащее корпус, бленду, оптическую систему и матричный приемник излучения, составляющие оптическую головку, и блок электроники, содержащий процессор, устройства ввода-вывода и устройство памяти, в котором содержится бортовой каталог навигационных звезд.
Недостатком данного устройства (известной общей проблемой ЗД с одной оптической головкой) является высокий уровень погрешности определения угла собственного вращения σZ, превышающий в несколько раз уровень погрешности определения углов прецессии и нутации σXY. Ширина поля зрения для данного устройства около 18°, погрешность определения углов прецессии и нутации σXY=10'', погрешность определения угла собственного вращения σZ=60'', σZ/σXY=6.
Недостатком данного устройства является высокий уровень погрешности определения угла собственного вращения σZ, превышающий в несколько раз уровень погрешности определения углов прецессии и нутации σXY; как указано в источнике, при ширине поля зрения для данного устройства около 18° погрешность определения углов прецессии и нутации σXY=10'', погрешность определения угла собственного вращения σZ=60'', т.е. σZ/σXY=6.
Раскрытие изобретения
Техническим результатом предлагаемого изобретения является уменьшение погрешности определения ЗД с одной оптической головкой угла собственного вращения до уровня близкого к погрешности определения углов прецессии и нутации.
Технический результат достигается за счет установки в апертуру оптической головки ЗД дополнительного оптического элемента - прямой треугольной призмы с зеркальными отражающими поверхностями (далее - плоский клин), позволяющего ЗД с одной оптической головкой контролировать не один участок звездного неба, расположенный на оптической оси (иметь одно поле зрения), а два участка звездного неба (иметь два поля зрения) таких же размеров, расположенных по разные стороны от оптической оси на равных угловых расстояниях.
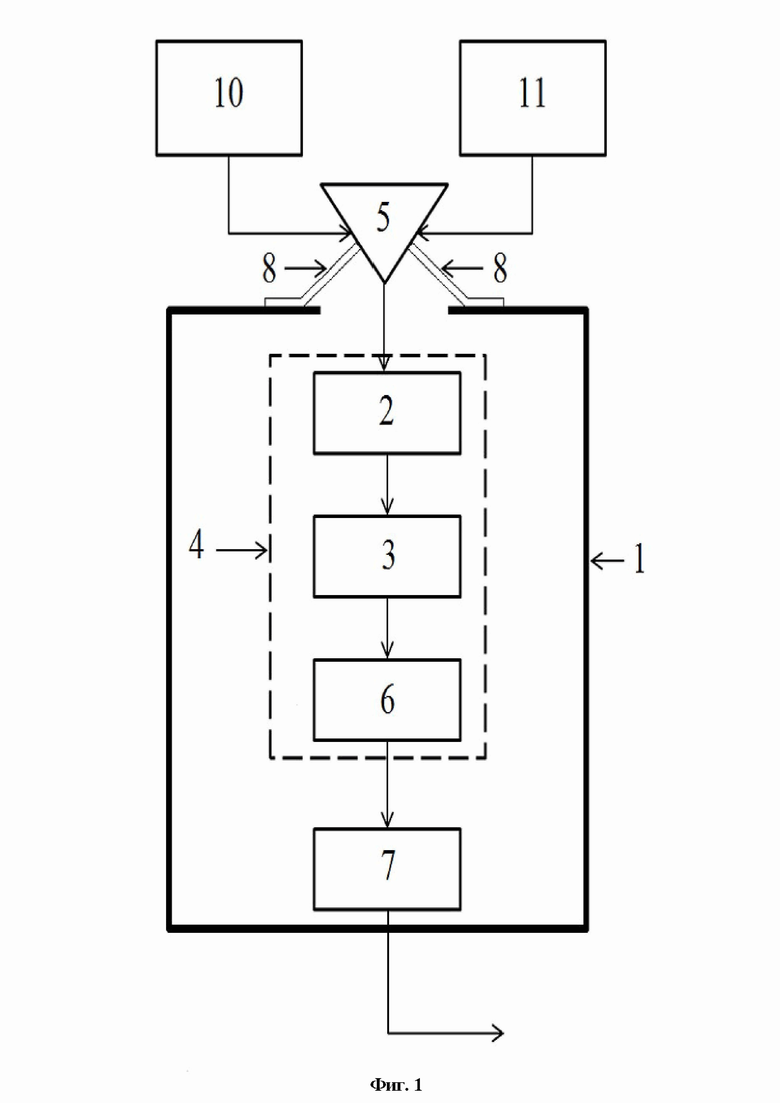
Сущность патентуемого изобретения поясняется описанием и рисунками Фиг. 1., Фиг. 2. и введены следующие обозначения:
1. - корпус датчика;
2. - бленда;
3. - оптическая система (объектив);
4. - оптическая головка;
5. - плоский клин;
6. - матричный приемник излучения;
7. - блок электроники;
8. - специальное крепление;
9. - поле зрения ЗД;
10. - поле зрения ЗД-1;
11. - поле зрения ЗД-2.
На Фиг. 1. представлена структурная схема патентуемого устройства.
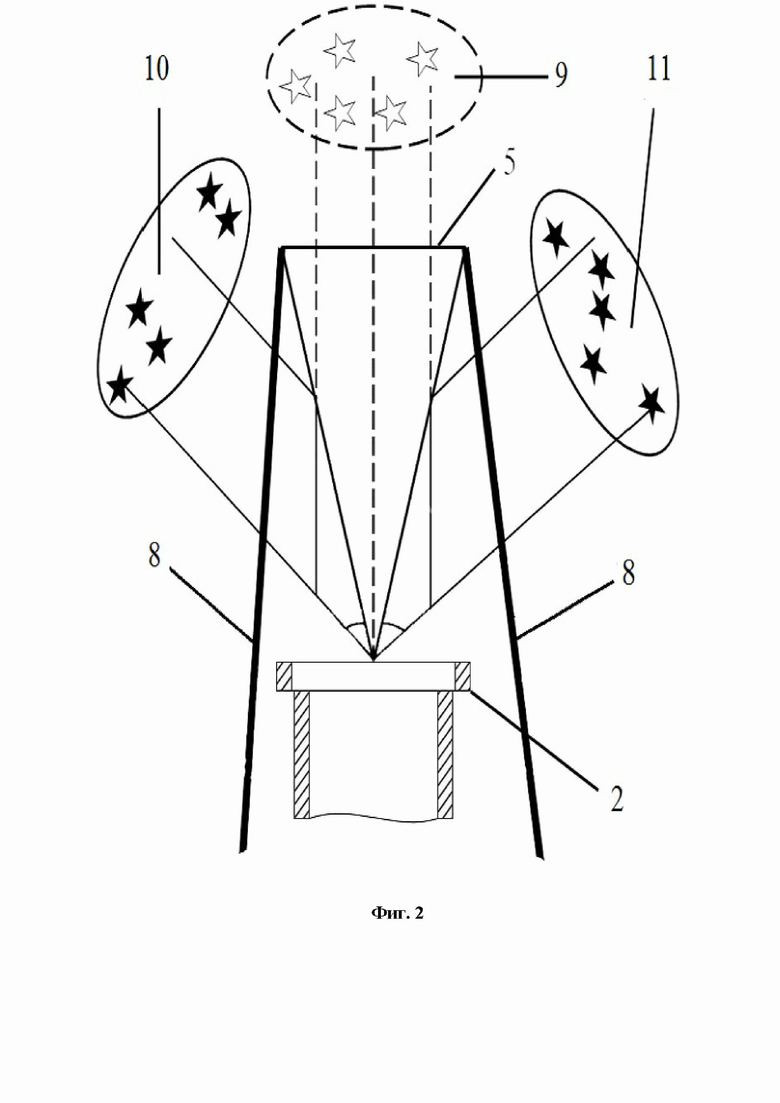
На Фиг. 2 наглядно проиллюстрирован принцип сбора оптической информации с помощью плоского клина, и продемонстрировано каким образом достигается технический результат, для чего показан сегмент звездного неба - поле зрения ЗД - 9, который обрабатывался бы ЗД при отсутствии плоского клина.
Патентуемое изобретение - устройство определения ориентации по звездам, как показано на Фиг. 1 представляет собой классическую схему ЗД с одной оптической головкой, =дополненную плоским клином 5, установленным в апертуру оптической головки 4 с помощью специального крепления 8.
ЗД устанавливается на посадочное место КА.
Плоский клин 5 представляет собой прямую треугольную призму с зеркальными отражающими поверхностями, основаниями которой являются равнобедренные треугольники, имеющие вершинные углы α, медианы которых параллельны оси визирования оптической головки 4, которая, в свою очередь, проходит через середины обеих плоскостей симметрии призмы, т.е. две боковые поверхности (далее раскрыв) образуют с осью визирования одинаковые углы α/2, третья боковая поверхность параллельна внешней поверхности бленды 2. Кромка прямоугольной призмы, соединяющая вершины углов α (далее - кромка плоского клина), примыкает к внешней поверхности бленды 2.
Длина кромки плоского клина 5, а также длина и ширина его третьей боковой поверхности должны быть больше диаметра входной апертуры оптической головки 4 настолько, чтобы все лучи в пределах поля зрения звездного датчика пересекались с зеркальными поверхностями клина.
Минимальная длина клина (вдоль параллельных ребер) L1 и ширина основания L2 задаются следующим соотношением
L1=L2=D+ϕR⋅l,
где D - диаметр входной апертуры объектива ЗД, ϕR - ширина поля зрения ЗД в радианах,
 - расстояние от входной апертуры объектива ЗД до основания клина.
- расстояние от входной апертуры объектива ЗД до основания клина.
Плоский клин фиксируется перед оптической головкой 4 с помощью специального крепления 8, которое крепится к корпусу звездного датчика или непосредственно к корпусу КА.
Принцип работы патентуемого устройства определения ориентации по звездам:
1. звезды, расположенные в пределах поля зрения ЗД-1 10 и поля зрения ЗД-2 11 испускают свет на зеркальные отражающие поверхности плоского клина 5;
2. благодаря наличию боковых зеркальных отражающих поверхностей плоского клина 5, в поле зрения ЗД попадают изображения двух фрагментов звездного неба - поля зрения ЗД-1 10 и поля зрения ЗД-2 11, центры которых лежат в плоскости симметрии плоского клина и на угловых расстояниях α по обе стороны от его плоскости симметрии. Угловые размеры областей одинаковы и равны ширине поля зрения звездного датчика.
3. бленда 2 пропускает свет звезд из поля зрения ЗД-1 10 и поля зрения ЗД-2 11, отраженный плоским клином 5 и задерживает излучение с других направлений.
4. объектив 3 создает в фокальной плоскости оптической головки изображения обоих этих участков неба (поле зрения ЗД-1 10 и поле зрения ЗД-2 11), которые накладываются друг на друга, и передает для регистрации на матричный приемник излучения 6;
5. матричный приемник излучения 6 регистрирует полученное общее изображение, преобразует излучение в фотоэлектроны, накапливает их за время экспозиции и передает построенное электронное изображение в блок электроники 7 единым кадром; технология работы матричного приемника излучения основана на известных принципах [6];
6. блок электроники 7 считывает электронное изображение из матричного приемника излучения 6, программно-алгоритмическое обеспечение блока электроники 7 разделяет содержащееся в полученном кадре общее изображение на изображения участков неба (поле зрения ЗД-1 10 и поле зрения ЗД-2 11) в ходе выполнения процедуры начального определения ориентации звездного датчика;
7. программно-алгоритмическое обеспечение блока электроники 7 сравнивает конфигурацию звезд в кадре с хранящимся в постоянной памяти звездного датчика каталогом навигационных звезд, для которых известны небесные координаты в экваториальной системе координат, проводит отождествление параметров звезд из каталога с параметрами звезд, изображенных в кадре, по отождествленным звездам производится вычисление ориентации (разворота) датчика относительно инерциальной системы координат, связанной с неподвижными звездами; в работе блока электроники 7 используются известные программные методы [7].
8. Полученные данные блок электроники 7 передает на вход информационной системы КА.
Процедура определения ориентации периодически повторяется.
Возможность реализации изобретения была проверена методом натурных испытаний. На ясном ночном звездном небе при использовании плоского клина с углом раствора 30° длиной 10 см и шириной основания 10 см на матричном приемнике излучения одновременно регистрировались два участка звездного неба расположенные по разные стороны от зенита на зенитных расстояниях равных 30°, т.е. в 60° друг от друга. Погрешность определения ориентации получилась равной σXY≈10''. Отношение погрешности угла разворота вокруг оси визирования к погрешности определения положения центра кадра составила σZ/σXY≈1,8.
Библиография
1. Федосеев В.И., Колосов М.П. Оптико-электронные приборы ориентации и навигации космических аппаратов. - М.: Логос, 2007. - 248 с.
2. Аванесов Г.А., Бессонов Р.В., Дементьев В.Ю., Мысник Е.А. Результаты натурных испытаний прибора звездной ориентации БОК3-М60/1000 // Механика, управление и информатика, №13, с. 180-189.
3. Majewski L., Blarre L., Perrimon N. et al. Hydra multiple head star sensor and its in-flight self-calibration of optical heads alignment // Proc. of SPIE, 2008. Vol.10566. P. 105660T-1.
4. Бирюков А.В., Прохоров М.Е., Тучин М.С. Байесовский подход к совместной обработке данных в звездном датчике с несколькими оптическими головками // В сборнике трудов Шестой Всероссийской научно-технической конференции «Современные проблемы ориентации и навигации космических аппаратов» / Под ред. Г.А. Аванесова. - М.: ИКИ РАН, 2019. - с. 172-185.
5. Патент РФ №2577558 «Устройство для определения ориентации объекта по звездам».
6. Howell S.B. Handbook of CCD Astronomy. - Cambridge University Press, 2006. - 208 p.
7. Ho K., Nakasuka S. Novel star identification method combining two star trackers with extended FOVs // In Proceedings of the AIAA Guidance, Navigation, and Control Conference - NY: AIAA - p.8448.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКИЙ ТЕЛЕСКОП ДЛЯ ОДНОВРЕМЕННОГО НАБЛЮДЕНИЯ ЗЕМЛИ И ЗВЁЗД | 2020 |
|
RU2746041C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА ПО ЗВЕЗДАМ | 2015 |
|
RU2577558C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ЗВЕЗДАМ И ДЛИТЕЛЬНОГО ПОДДЕРЖАНИЯ ПОВЫШЕННОЙ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ИХ РЕАЛИЗАЦИИ | 2014 |
|
RU2585179C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
Изобретение относится к космической технике и может быть использовано для оперативного точного определения ориентации КА относительно инерциальной системы координат, связанной с неподвижными звездами. Устройство определения ориентации по звездам состоит из корпуса звездного датчика (ЗД), оптической головки, содержащей бленду, оптическую систему и матричный приемник излучения, и блока электроники. При этом схема ЗД дополнена плоским клином, установленным в апертуру оптической системы с помощью крепления, которое крепится к корпусу ЗД. Плоский клин представляет собой прямую треугольную призму с зеркальными отражающими поверхностями, основаниями которой являются равнобедренные треугольники, медианы которых параллельны оси визирования оптической головки, длина кромки плоского клина, а также длина и ширина его третьей боковой поверхности, которая параллельна внешней поверхности бленды, должны быть больше диаметра входной апертуры оптической головки настолько, чтобы все лучи в пределах поля зрения звездного датчика пересекались с зеркальными поверхностями клина с выполнением определенного соотношения. Технический результат – уменьшение погрешности определения угла собственного вращения до уровня, близкого к погрешностям определения углов прецессии и нутации ЗД с одной оптической головкой. 2 ил.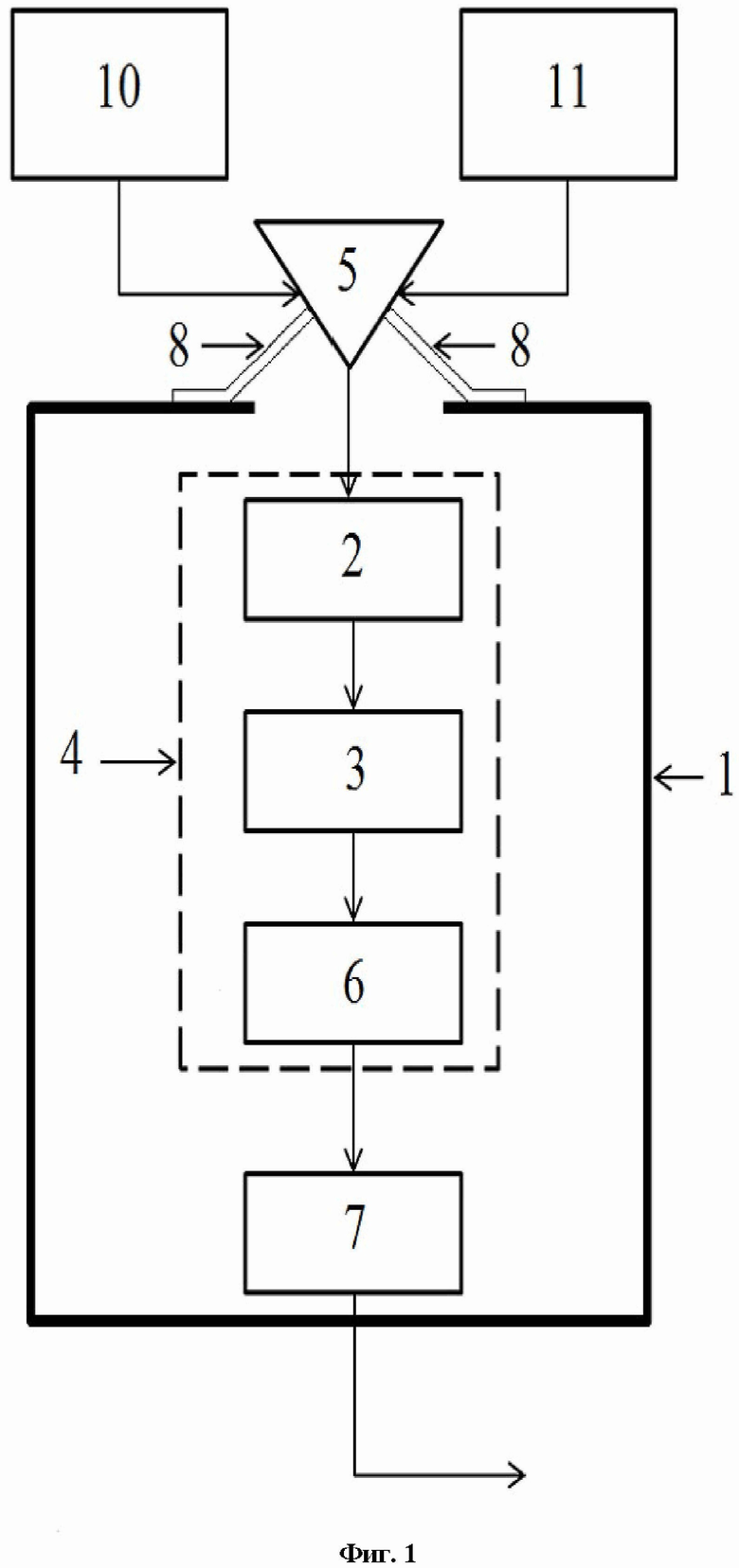
Устройство определения ориентации по звездам, состоящее из корпуса звездного датчика (ЗД), оптической головки, содержащей бленду, оптическую систему и матричный приемник излучения, и блока электроники, отличающееся тем, что схема ЗД дополнена плоским клином, установленным в апертуру оптической системы с помощью крепления, которое крепится к корпусу ЗД, причем плоский клин представляет собой прямую треугольную призму с зеркальными отражающими поверхностями, основаниями которой являются равнобедренные треугольники, медианы которых параллельны оси визирования оптической головки, длина кромки плоского клина, а также длина и ширина его третьей боковой поверхности, которая параллельна внешней поверхности бленды, должны быть больше диаметра входной апертуры оптической головки настолько, чтобы все лучи в пределах поля зрения звездного датчика пересекались с зеркальными поверхностями клина с выполнением соотношения L1=L2=D+ϕR⋅l, где L1 - минимальная длина клина вдоль параллельных ребер, L2 - ширина основания, D - диаметр входной апертуры объектива ЗД, ϕR - ширина поля зрения ЗД в радианах, l – расстояние от входной апертуры объектива ЗД до основания клина.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА ПО ЗВЕЗДАМ | 2015 |
|
RU2577558C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
| СИСТЕМА АСТРООРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1989 |
|
SU1795708A1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |

