Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ управления ГТД, реализованный в электронно-гидромеханической САУ супервизорного типа (Кеба И.В. «Летная эксплуатация вертолетных ГТД», М., «Транспорт», 1976 г., с. 43-45).
Способ заключается в том, что с целью повышения точности управления управляющее воздействие гидромеханического регулятора корректируется в ограниченном диапазоне электронным корректором.
Недостатком известного способа является его низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, реализованный, например, в электронно-гидромеханической САУ двигателя ТВ7-117, входящего в силовую установку (СУ) самолета Ил-114 («Руководство по эксплуатации двигателя ТВ7-117С», ЛНПО им. В.Я.Климова, Ленинград, 1988 г., с.96-97).
Способ заключается в том, что измеряют частоту вращения свободной турбины, сравнивают ее с наперед заданным предельным значением, определяемым для каждого типа двигателя расчетно-экспериментальным путем, если частота вращения свободной турбины превысила предельное значение на наперед заданное для каждого типа двигателя время, прекращают подачу топлива в камеру сгорания (КС) и выключают двигатель.
Недостатком этого способа является следующее.
Канал измерения частоты вращения силовой турбины имеет хотя и высокую, но конечную надежность. Это может привести к формированию ложного сигнала частоты вращения, превышающего предельное значение, что, в свою очередь, приведет к выключению нормально работающего двигателя. Это, в конечном счете, снижает надежность работы силовой установки (СУ) и безопасность летательного аппарата (ЛА).
Целью изобретения является повышение качества работы САУ с целью повышения надежности работы СУ и безопасности ЛА.
Поставленная цель достигается тем, что в способе управления ГТД, заключающемся в том, что измеряют частоту вращения свободной турбины, сравнивают ее с наперед заданным предельным значением, определяемым для каждого типа двигателя расчетно-экспериментальным путем, если частота вращения свободной турбины превысила предельное значение на наперед заданное для каждого типа двигателя время, прекращают подачу топлива в камеру сгорания (КС) и выключают двигатель, дополнительно, если частота вращения свободной турбины превысила первое наперед заданное значение, определяемое для каждого двигателя расчетно-экспериментальным путем, фиксируют расход топлива в КС в момент превышения и снижают его до уровня расхода «малого газа», контролируют изменение частоты вращения свободной турбины, если частота вращения начинает уменьшаться и становится меньше второго наперед заданного значения, определяемого для каждого двигателя экспериментальным путем, увеличивают расход топлива в темпе автомата приемистости до значения, зафиксированного в момент превышения частотой вращения свободной турбины первого наперед заданного значения.
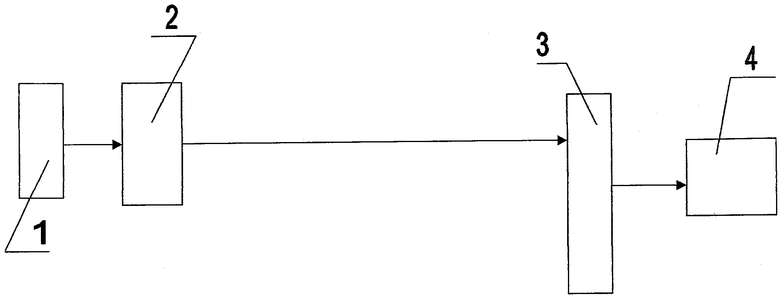
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные первый блок 1 датчиков (БД), электронный регулятор 2 (ЭР), блок 3 электрогидропреобразователей (ЭГП), дозатор 4.
Устройство работает следующим образом.
ЭР 2 (представляющий собой бортовую цифровую вычислительную машину с устройствами ввода/вывода, вычислителем - процессор, ОЗУ и ПЗУ и перезаписываемым запоминающим устройством) по сигналам датчиков из БД 1 по известным зависимостям (см., например, Шляхтенко С.М. «Теория авиационных ВРД», М., «Машиностроение», 1975 г., с. 411-414; Шевяков А.А. «Теория автоматического управления силовыми установками летательных аппаратов», М., «Машиностроение», 1976 г., с. 46-56, 237, 318) формирует управляющее воздействие на блок ЭГП 3, который с помощью дозатора 4 осуществляет требуемые изменения расхода топлива в КС двигателя, а также положения лопаток входного направляющего аппарата (ВНА) компрессора и клапанов (КПВ) перепуска воздуха (не показаны).
Кроме этого, измеренную в БД 1 частоту вращения свободной турбины в ЭР 2 сравнивают с первым наперед заданным значением, определяемым для каждого типа двигателя расчетно-экспериментальным путем. Для двигателя PW 127, используемого в составе СУ вертолета «Ансат», например, это значение равно 110%. Если частота вращения свободной турбины превысила первое наперед заданное значение, ЭР 2 «запоминает» расход топлива в КС в момент превышения и выдает команду в блок 3. По этой команде блок 3 с помощью дозатора 4 снижает расход топлива до уровня, соответствующего расходу двигателя на режиме «малого газа». Одновременно с этим ЭР 2 контролирует изменение частоты вращения свободной турбины: если частота вращения начинает уменьшаться и становится меньше второго наперед заданного значения, определяемого для каждого двигателя экспериментальным путем (для двигателя PW 127, например, это значение равно 109%.), ЭР 2 формирует команду в блок 3 и с помощью дозатора 4 увеличивает расход топлива в темпе автомата приемистости до значения, зафиксированного в момент превышения частотой вращения свободной турбины первого наперед заданного значения.
Таким образом, если превышение первой наперед заданной частоты было ложным, несвязанным с реальной раскруткой ротора свободной турбины из-за расцепки валов турбины и винта (винтовентилятора), двигатель не выключается, а возвращается на рабочий режим, предшествующий моменту ложного превышения.
В случае, если превышение первой наперед заданной частоты было связано с реальной раскруткой ротора свободной турбины из-за расцепки валов турбины и винта (винтовентилятора), после снижения расхода топлива до расхода «малого газа» частота вращения свободной турбины будет продолжать расти. При превышении частотой предельного значения, определяемого для каждого типа двигателя расчетно-экспериментальным путем (для двигателя PW 127, например, это значение равно 120%), на наперед заданное для каждого типа двигателя время (для двигателя PW 127, например, это время равно 0, 04 с) ЭР 2 формирует команду в блок 3, по которой блок 3 совместно с дозатором 4 прекращает подачу топлива в КС, и двигатель выключается.
Таким образом, за счет повышения качества работы САУ повышаются надежность работы СУ и безопасность ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2493392C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2468229C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2009 |
|
RU2425996C1 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ВЕРТОЛЕТА | 2010 |
|
RU2482024C2 |
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2017 |
|
RU2661802C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2489592C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ ПРИ ЕГО ИСПЫТАНИЯХ НА СТЕНДЕ | 2011 |
|
RU2491527C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2329388C1 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД. Сущность изобретения заключается в том, что дополнительно, если частота вращения свободной турбины превысила первое наперед заданное значение, определяемое для каждого двигателя расчетно-экспериментальным путем, фиксируют расход топлива в КС в момент превышения и снижают его до уровня расхода «малого газа», контролируют изменение частоты вращения свободной турбины, если частота вращения начинает уменьшаться и становится меньше второго наперед заданного значения, определяемого для каждого двигателя экспериментальным путем, увеличивают расход топлива в темпе автомата приемистости до значения, зафиксированного в момент превышения частотой вращения свободной турбины первого наперед заданного значения. Технический результат изобретения - повышение надежности работы двигателя и безопасности ЛА за счет повышения качества работы САУ. 1 ил.
Способ управления газотурбинным двигателем, заключающийся в том, что измеряют частоту вращения свободной турбины, сравнивают ее с наперед заданным предельным значением, определяемым для каждого типа двигателя расчетно-экспериментальным путем, если частота вращения свободной турбины превысила предельное значение на наперед заданное для каждого типа двигателя время, прекращают подачу топлива в камеру сгорания (КС) и выключают двигатель, отличающийся тем, что дополнительно, если частота вращения свободной турбины превысила первое наперед заданное значение, определяемое для каждого двигателя расчетно-экспериментальным путем, фиксируют расход топлива в КС в момент превышения и снижают его до уровня расхода «малого газа», контролируют изменение частоты вращения свободной турбины, если частота вращения начинает уменьшаться и становится меньше второго наперед заданного значения, определяемого для каждого двигателя экспериментальным путем, увеличивают расход топлива в темпе автомата приемистости до значения, зафиксированного в момент превышения частотой вращения свободной турбины первого наперед заданного значения.
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2376487C2 |
| СПОСОБ КОНТРОЛЯ, ДИАГНОСТИРОВАНИЯ И КОМПЕНСАЦИИ ОТКАЗОВ В СИСТЕМАХ УПРАВЛЕНИЯ ДВИГАТЕЛЕЙ ДВУХДВИГАТЕЛЬНОЙ АВИАЦИОННОЙ СИЛОВОЙ УСТАНОВКИ | 1995 |
|
RU2106514C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА ДЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2322601C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОЙ УСТАНОВКИ ОТ РАСКРУТКИ СИЛОВОЙ ТУРБИНЫ | 2006 |
|
RU2316665C1 |
| US 5609465 А, 01.03.1997 | |||
| US 6321525 B1, 27.11.2001. | |||

