Изобретение относится к области авиационного двигателестроения и может быть использовано в электронных системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ управления ГТД, реализованный в электронно-гидромеханической САУ супервизорного типа. Кеба И.В. «Летная эксплуатация вертолетных ГТД», М.: «Транспорт», 1976 г., с.123-125.
Способ заключается в том, что с целью повышения точности управления управляющее воздействие гидромеханического регулятора корректируется в ограниченном диапазоне электронным корректором.
Недостатком известного способа является его низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ управления расходом топлива в ГТД, заключающийся в том, что измеряют положение рычага (РУД) управления двигателем, частоты вращения турбокомпрессора и свободной турбины (СТ), давление и температуру воздуха на входе в двигатель, температуру газов за турбиной газогенератора, формируют заданное значение частоты вращения турбокомпрессора как функцию от положения РУД давления и температуры воздуха на входе в двигатель, задают предельные для данного двигателя значения температуры газов за турбиной газогенератора и частоты вращения СТ, сравнивают заданное значение частоты вращения турбокомпрессора и измеренное, сравнивают предельное для данного двигателя значение температуры газов за турбиной газогенератора и измеренное, сравнивают предельное для данного двигателя значение частоты вращения СТ и измеренное, полученные рассогласования селектируют по минимуму с сигналом автомата приемистости (АЛ), отселектированную величину подают в пропорционально-интегральный (ПИ) регулятор, где формируют управляющее воздействие на дозатор расхода топлива, подаваемого в камеру сгорания (КС) двигателя.
Недостатком известного способа является следующее.
Для двигателей нового поколения, например двигателя ПД-14 разработки ОАО «Авиадвигатель», г.Пермь, входящего в состав силовой установки (СУ) самолета МС-21 разработки ОАО «Иркут», г.Москва, предъявляется следующее требование: двигатель в процессе взлета самолета должен обеспечить взлетную тягу даже в случае пожара в мотогондоле.
При использовании в САУ ПД-14 известного способа выполнить это требование невозможно в силу следующих причин.
При возникновении в мотогондоле двигателя пожара в первую очередь выходят из строя «внешние» датчики и их линии связи (датчики и линии связи, расположенные снаружи корпуса двигателя: датчики положения РУД давления и температуры воздуха на входе в двигатель). В отличие от них практически «до конца» работают датчики, расположенные в «горячей» части двигателя: термопары, датчики частоты вращения, расположенные в охлаждаемых опорах двигателя.
Электронный регулятор двигателя (для двигателя ПД-14 - это агрегат РЭД-14 разработки ОАО «СТАР», г.Пермь) и исполнительная часть САУ, обеспечивающая дозирование топлива в камеру сгорания и управление механизацией двигателя (для двигателя ПД-14 - это агрегат ДГ-14 разработки ОАО «СТАР»), имеют специальную защиту, позволяющую работать в условиях повышенной температуры окружающей среды.
Несмотря на это при реализации в САУ известного способа управления потеря информации о положения РУД давлении и температуре воздуха на входе в двигатель, вызванная пожаром в мотогондоле двигателя, не позволит обеспечить поддержание взлетной тяги двигателя. Это снижает надежность работы СУ и безопасность самолета.
Целью изобретения является повышение надежности работы СУ и безопасности самолета.
Поставленная цель достигается тем, что в способе управления расходом топлива в ГТД, заключающемся в том, что измеряют положение РУД частоты вращения турбокомпрессора и СТ, давление и температуру воздуха на входе в двигатель, температуру газов за турбиной газогенератора, формируют заданное значение частоты вращения турбокомпрессора как функцию от положения РУД давления и температуры воздуха на входе в двигатель, задают предельные для данного двигателя значения температуры газов за турбиной газогенератора и частоты вращения СТ, сравнивают заданное значение частоты вращения турбокомпрессора и измеренное, сравнивают предельное для данного двигателя значение температуры газов за турбиной газогенератора и измеренное, сравнивают предельное для данного двигателя значение частоты вращения СТ и измеренное, полученные рассогласования селектируют по минимуму с сигналом АП, отселектированную величину подают в ПИ-регулятор. где формируют управляющее воздействие на дозатор расхода топлива, подаваемого в КС двигателя, дополнительно при поступлении в процессе взлета самолета сигнала «Пожар в мотогондоле», формируемого противопожарной системой самолета, фиксируют текущее значение частоты вращения турбокомпрессора и используют его в качестве заданного значения частоты вращения турбокомпрессора в течение наперед заданного времени, по истечении которого прекращают подачу топлива в КС и выключают двигатель.
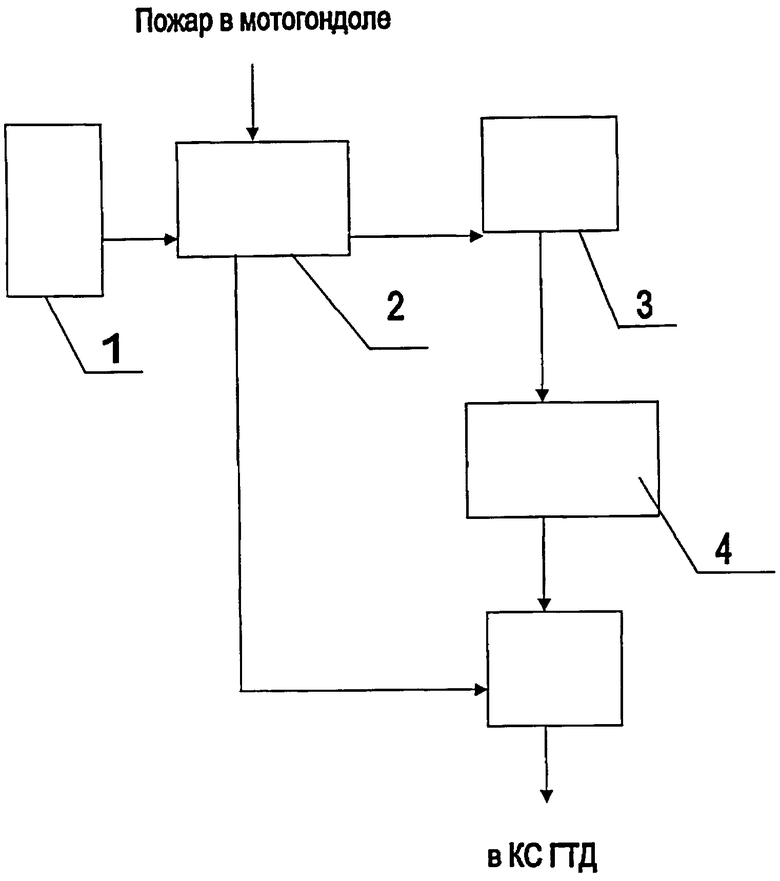
На фигуре представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные блок 1 датчиков (БД), электронный регулятор 2 двигателя (РЭД), электрогидропреобразователь 3 (ЭГП), дозатор 4 топлива, клапан 5 останова (КО), управляемый вход КО 5 подключен к выходу РЭД 2.
РЭД 2 представляет собой бортовую цифровую вычислительную машину (БЦВМ), содержащую постоянное запоминающее устройство (ПЗУ), на котором записано программное обеспечение (ПО), реализующее алгоритмы управления двигателем. Дополнительно БЦВМ оснащена устройствами ввода/вывода (УВВ) физических сигналов (из БД 1 и в ЭГП 3), оперативное запоминающее устройство (ОЗУ), необходимое для обработки процессором БЦВМ поступающей из УВВ информации, репрограммируемое запоминающее устройство (РПЗУ), необходимое для хранения информации, относящейся к индивидуальным характеристикам двигателя (эксплуатационные регулировки, наработки, остаток ресурса). БЦВМ, ПЗУ, ПО, УВВ, ОЗУ, процессор, РПЗУ на фигуре не показаны.
Устройство работает следующим образом.
В РЭД 2 с помощью БД 1 измеряют положение РУД частоты вращения турбокомпрессора и СТ, давление и температуру воздуха на входе в двигатель, температуру газов за турбиной газогенератора.
По хранящимся в ПЗУ РЭД 2 наперед заданным зависимостям:
- формируют заданное значение частоты вращения турбокомпрессора как функцию от положения РУД давления и температуры воздуха на входе в двигатель (пример такой зависимости приведен, например, в книге Бесекерский В.А., Попов Е.П. «Теория автоматического регулирования», М., «Наука», 1975 г., с.34-35),
- задают предельные для данного двигателя значения температуры газов за турбиной газогенератора и частоты вращения СТ (для двигателя ПД-14 эти значения составляют 1370К по температуре газов и 8000 об./мин. по частоте вращения СТ).
Далее в РЭД 2 сравнивают заданное значение частоты вращения турбокомпрессора и измеренное с помощью БД 1, сравнивают предельное для данного двигателя значение температуры газов за турбиной газогенератора и измеренное с помощью БД 1, сравнивают предельное для данного двигателя значение частоты вращения СТ и измеренное с помощью БД 1.
Полученные рассогласования селектируют по минимуму с сигналом АП (на фигуре не показан), работающего, например, по программе

где
Gт - предельно допустимый расход топлива для данного режима работы двигателя,
αРУД - положение РУД
Т*BX - температура воздуха на входе в двигатель,
Р*BX, - давление воздуха на входе в двигатель,
Рк - давление воздуха за компрессором двигателя,
nк - частота вращения компрессора двигателя.
Отселектированную величину подают в ПИ-регулятор (на фигуре не показан), где формируют управляющее воздействие на дозатор расхода топлива, подаваемое с помощью УВВ РЭД 2 через ЭГП 3 на дозатор 4, с помощью которого и осуществляется управление расходом топлива в КС двигателя. Сигнал из РЭД 2 на КО 5 при этом отсутствует и КО 5 находится в открытом положении.
Дополнительно при поступлении в РЭД 2 в процессе взлета самолета сигнала «Пожар в мотогондоле», формируемого противопожарной системой самолета (на фигуре не показана), фиксируют текущее значение частоты вращения турбокомпрессора и используют его в качестве заданного значения частоты вращения турбокомпрессора в течение наперед заданного времени, по истечении которого по командам РЭД 2 с помощью ЭГП 3, дозатора 4 и КО 5 прекращают подачу топлива в КС и выключают двигатель.
Для двигателя ПД-14 и самолета МС-21 режим взлета определяется наличием одновременного выполнения следующих условий:
- угол установки РУД больше 80°;
- стояночный тормоз выключен;
- частот вращения ротора компрессора больше 99%.
Наперед заданное время, в течение которого даже при наличии сигнала «Пожар в мотогондоле» САУ сохраняет взлетный режим двигателя - 5 минут (задано в ТЗ на САУ двигателя ПД-14).
Т.о. за счет повышения качества управления расходом топлива в КС двигателя обеспечивается нормальный взлет самолета даже при возникновении пожара в мотогондоле. После взлета самолета двигатель, в мотогондоле которого возник пожар, выключается, пожар локализуется и ликвидируется (с помощью противопожарной системы самолета). После этого самолет даже с выключенным двигателем может выполнить безопасную посадку на одном двигателе в аэропорту вылета(если это двухдвигательный самолет типа Ту-204 или МС-21) или продолжить полет (если это четырехдвигательный самолет типа Ил-96-400).
Это повышает надежность работы двигателя как элемента СУ самолета и безопасность самого самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2497001C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2516761C2 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2493392C2 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2474712C2 |
| СПОСОБ УПРАВЛЕНИЯ МЕХАНИЗАЦИЕЙ КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2012 |
|
RU2514463C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2497000C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2474713C2 |
| СПОСОБ УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ СИЛОВОЙ УСТАНОВКОЙ | 2010 |
|
RU2436979C2 |
| СПОСОБ УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ СИЛОВОЙ УСТАНОВКОЙ САМОЛЕТА | 2011 |
|
RU2493051C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2468257C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронных системах (САУ) автоматического управления газотурбинными двигателями (ГТД). Сущность изобретения заключается в том, что дополнительно при поступлении в процессе взлета самолета сигнала «Пожар в мотогондоле», формируемого противопожарной системой самолета, фиксируют текущее значение частоты вращения турбокомпрессора и используют его в качестве заданного значения частоты вращения турбокомпрессора в течение наперед заданного времени, по истечении которого прекращают подачу топлива в КС и выключают двигатель. Технический результат изобретения заключается в повышении качества управления расходом топлива в КС двигателя на взлете самолета, за счет чего даже при возникновении пожара в мотогондоле обеспечивается работа двигателя на режиме с располагаемой тягой, обеспечивающей нормальный взлет самолета. Это повышает надежность работы двигателя как элемента СУ самолета и безопасность самого самолета. 1 ил.
Способ управления расходом топлива в ГТД, заключающийся в том, что измеряют положение рычага (РУД) управления двигателем, частоты вращения турбокомпрессора и свободной турбины (СТ), давление и температуру воздуха на входе в двигатель, температуру газов за турбиной газогенератора, формируют заданное значение частоты вращения турбокомпрессора как функцию от положения РУД, давления и температуры воздуха на входе в двигатель, задают предельные для данного двигателя значения температуры газов за турбиной газогенератора и частоты вращения СТ, сравнивают заданное значение частоты вращения турбокомпрессора и измеренное, сравнивают предельное для данного двигателя значение температуры газов за турбиной газогенератора и измеренное, сравнивают предельное для данного двигателя значение частоты вращения СТ и измеренное, полученные рассогласования селектируют по минимуму с сигналом автомата приемистости (АП), отселектированную величину подают в пропорционально-интегральный (ПИ) регулятор, где формируют управляющее воздействие на дозатор расхода топлива, подаваемого в камеру сгорания (КС) двигателя, отличающийся тем, что дополнительно при поступлении в процессе взлета самолета сигнала «Пожар в мотогондоле», формируемого противопожарной системой самолета, фиксируют текущее значение частоты вращения турбокомпрессора и используют его в качестве заданного значения частоты вращения турбокомпрессора в течение наперед заданного времени, по истечении которого прекращают подачу топлива в КС и выключают двигатель.
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ТУРБОВИНТОВУЮ СИЛОВУЮ УСТАНОВКУ | 2006 |
|
RU2334889C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ СО СВОБОДНОЙ ТУРБИНОЙ | 2008 |
|
RU2375598C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ СО СВОБОДНОЙ ТУРБИНОЙ | 2004 |
|
RU2282737C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА ДЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2322601C1 |
| US 6321525 B1, 27.11.2001 | |||
| СПОСОБ ПОЛУЧЕНИЯ ИЗОТОПНО-ОБОГАЩЕННОГО ОКСИДА ТЕЛЛУРА (IV) | 2004 |
|
RU2272783C1 |

