Настоящее изобретение относится к усовершенствованному шкиву для высокоэффективной лебедки типа, используемого для передачи механической энергии с помощью тяговых усилий, оказываемых на тросы, соединенные с подвижным грузом.
Высокоэффективная лебедка используется в нескольких применениях для подъема или перемещения груза, путем натягивания троса и передачи энергии посредством троса, который может быть смотан.
В последнее время применение лебедок для передачи энергии приобретает все большую важность в секторе управления энергией ветра, когда лебедки, присоединенные к генераторам переменного тока и установкам, генерирующим электроэнергию, используются для получения кинетической энергии от ветра и для преобразования производимой механической энергии в электрическую энергию.
Важным аспектом при получении механической энергии при использовании тросов, соединенных с подвижными грузами, является эффективность ведущей лебедки, для которой: малые доли энергии вызывают большой нагрев ведущих шкивов и троса.
В процессе для получения энергии из ветра применяется использование тросов повышенной прочности. Натяжение троса создается путем подъема аэростата, летящего по поперечному ветру. Шкив или барабан, на который намотан трос, вращается благодаря силе разматывания, создаваемой самим тросом. Механическая энергия создается посредством комбинирования механического натяжения в тросе и скорости, с которой трос натягивается при разматывании со шкива.
Шкив или барабан, на который намотан трос, вращается благодаря силе разматывания, создаваемой самим тросом. В ходе этого процесса кинетическая энергия ветра сперва преобразуется в механическую энергию, благодаря трению между тросом и контактной поверхностью шкива или барабана; затем она преобразуется в электрическую энергию с помощью генераторов переменного тока, соединенных с лебедкой.
В ходе преобразования возникают потери энергии, поскольку теплота, которая нагревает контактную поверхность шкива и повышает внутреннюю температуру троса, ухудшает механические свойства из-за перегрева.
Традиционные лебедки не подходят для передачи большого количества энергии из-за их низкой эффективности. В случае высокомощной лебедки, оборудованной тросами высокой прочности, даже небольшая часть потерянной мощности может быть критичной. Например, лебедка с эффектностью 97%, используемая для создания мощности 1,5 МВт, создает тепловой поток в 45 кВт, который должен быть подходящим образом рассеян для предотвращения перегрева троса. Вместе с потерями, создаваемыми подшипниками вращательных элементов, тепловой поток, в основном, создается силами трения между тросом и шкивом.
Трение внутри троса создается относительными перемещениями и разрушением различных нитей и плетений, составляющих трос, и геометрическими расположенными так, чтобы скрестись друг от друга. С другой стороны, трение между тросом и шкивом является необходимым ингредиентом, позволяющим лебедке извлекать энергию из троса, в то время как трение, зависящее от любых относительных перемещений между тросом и шкивом, должно быть снижено до минимума.
Конструкция высокоэффективной лебедки должна соответствовать двум концепциям: трос, перемещающийся вдоль лебедки, подвержен градиенту натяжения, связанному с градиентом разрушения в зависимости от природы материала, составляющего трос; трос, намотанный на шкив более чем на один оборот, при том что шкив вращается относительно своей собственной продольной оси, обязательно должен перемещаться перпендикулярно направлению основной движущей силы, например вдоль продольной оси шкива, для того чтобы предотвратить перехлест участков троса с разной кривизной.
В документе WO 2011121272 описано решение, связанное с первой концепцией, задачей которого является более равномерный градиент разрушения, при этом трос становится менее напряженным и менее подверженным разрушающим воздействиям. Данная проблема решается с помощью двух связанных шкивов, каждый из которых образует прерывистую поверхность контакта между тросом и барабаном.
В документе FR 1105165 описана схема лебедки, связанная со второй концепцией, содержащая шкивы с цилиндрическими пазами, чей диаметр постепенно уменьшается или увеличивается для адаптации к различной степени разрушения вдоль троса, так что паз с большим диаметром контактирует с участком троса, подверженным большей степени натяжения, и наоборот.
Задачей настоящего изобретения является решение вышеописанных проблем предшествующего уровня техники, путем обеспечения усовершенствованного шкива для высокоэффективной лебедки, для получения большей энергопроизводительности и снижения потерь энергии из-за трения и для снижения износа троса.
Вышеуказанные и прочие задачи и преимущества изобретения, как будет ясно из следующего описания, достигаются с помощью усовершенствованного шкива по пункту 1 формулы изобретения, который контактирует с участком троса между двумя концами, один из которых соединен с рабочей нагрузкой, а другой имеет минимальное или нулевое натяжение, отличающегося тем, что он содержит кинематическую цепочку, состоящую из периферийных опор. Предпочтительные воплощения и нетривиальные варианты настоящего изобретения являются предметом зависимых пунктов формулы изобретения.
Все прилагаемые пункты формулы изобретения являются неотъемлемой частью настоящего описания.
Должно быть очевидно, что многочисленные варианты и модификации (например, в отношении размеров, форм, расположений и элементов с эквивалентной функциональностью) могут быть выполнены в описанном предмете, не нарушая пределов изобретения, определенных в прилагаемой формуле изобретения.
Настоящее изобретение будет описано подробнее с помощью его предпочтительных воплощений, приведенных в виде неограничивающего примера, со ссылкой на прилагаемые чертежи, на которых:
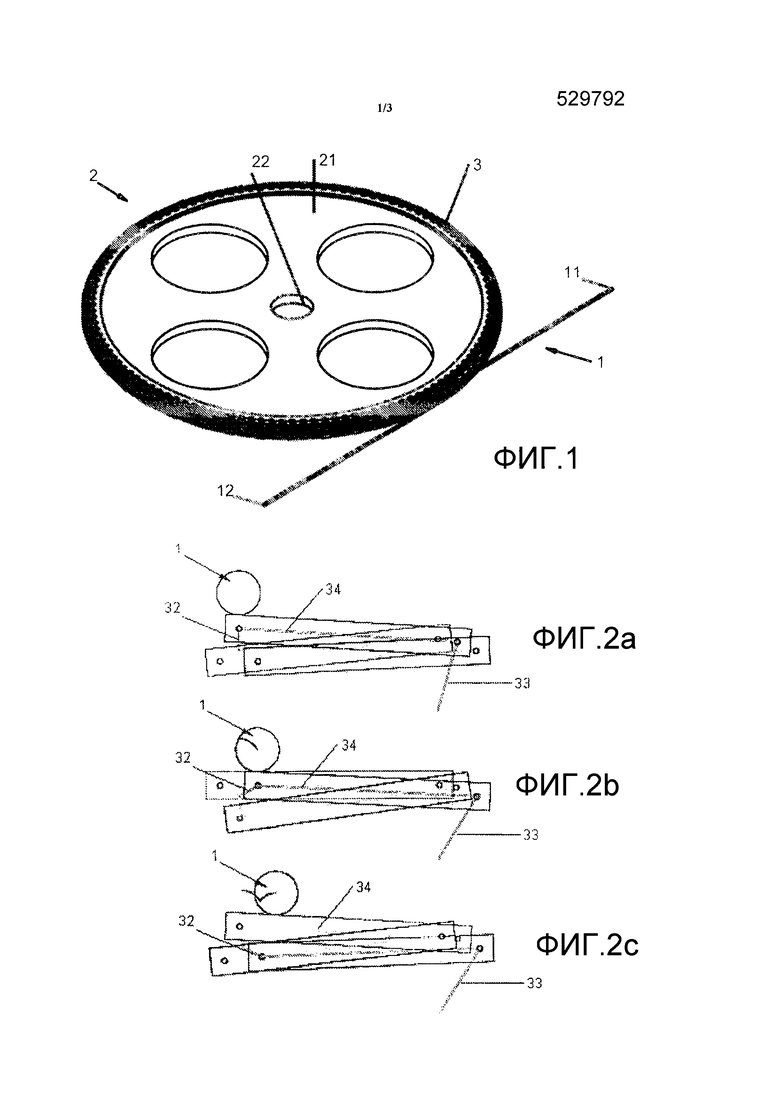
Фигура 1 изображает аксонометрический вид шкива, соединенного с тросом, содержащего кинематическую цепочку периферийных опор в соответствии с настоящим изобретением;
Фигуры 2, 2b и 2с изображают поперечный вид работы трех соединенных и смежных шарнирных механизмов, взаимодействующих с периферийными опорами шкива с Фигуры 1;
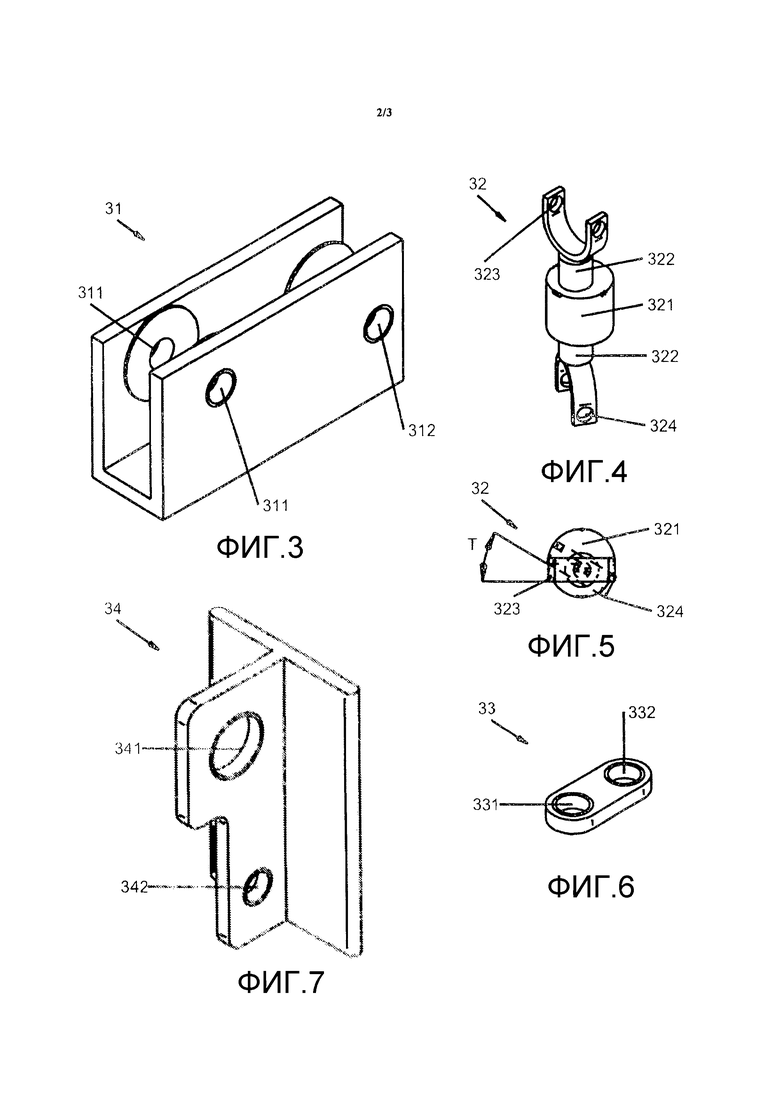
Фигуры 3, 4, 6 и 7 изображают аксонометрический вид компонентов, принадлежащих каждой периферийной опоре, соединенной со шкивом с Фигуры 1;
Фигура 5 изображает вид спереди компонента с Фигуры 4;
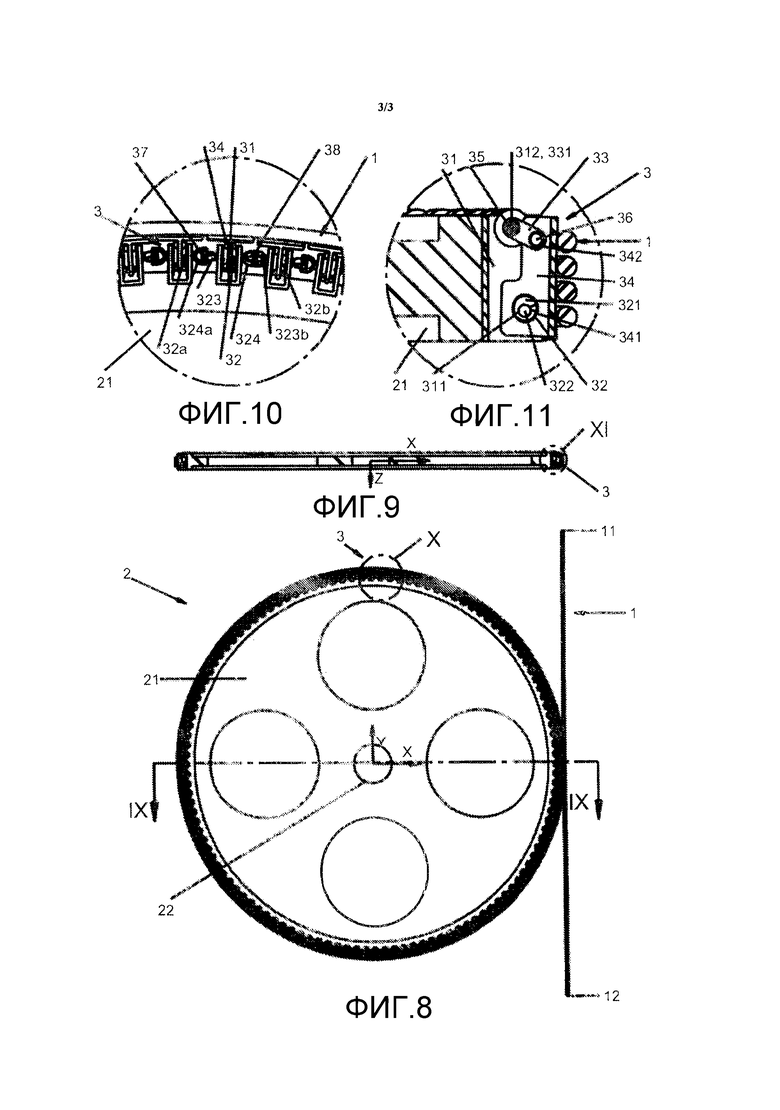
Фигура 8 изображает вид спереди шкива с Фигуры 1;
Фигура 9 изображает вид в разрезе, вдоль плоскости, проходящей по линии IX-IX с Фигуры 8, шкива с Фигуры 1;
Фигура 10 изображает увеличенную часть Х с Фиг. 8;
Фигура 11 изображает увеличенную часть XI с Фиг. 9.
Со ссылкой на Фигуру 1 по меньшей мере один участок троса 1 между входным участком 11 и выходным участком 12 намотан на три оборота на шкив 2.
Шкив 2 состоит из по меньшей мере одного диска 21, оборудованного центральным отверстием 22, используемым для центровки и соединения с валом (не показано), соединенным с высокоэффективной лебедкой (не показано).
Входной 11 и выходной 12 участки троса 1 соответственно соединены с рабочей нагрузкой (не показано) и устройством хранения (не показано), в соответствии с градиентом натяжения, который определяет максимальное значение натяжения на входном участке 11 и минимальное или нулевое значение натяжения на выходном участке 12.
Диск 21 поддерживает витки троса 1 с помощью кинематической цепочки, состоящей из периферийных опор 3, равномерно соединенных и распределенных вдоль окружности.
Со ссылкой на Фигуры 3-7, каждая периферийная опора 3 состоит из:
- по меньшей мере одной рамы 31, полученной из экструдированного материала с U-образным поперечным сечением, в которой размещены по меньшей мере две пары отверстий 311 и 312 под втулку;
- по меньшей мере одного кривошипа 32, состоящего из эксцентрика 321 в форме пояска, чья внутренняя ось занята шпилькой 322, на концах которой размещены вилки 323 и 324;
- по меньшей мере одного качающегося рычага 33, в котором размещены два отверстия 311 и 322 под втулку;
- по меньшей мере одного соединительного стержня 34, выполненного из экструдированного материала и имеющего Т-образное поперечное сечение, оборудованного по меньшей мере двумя отверстиями 341 и 342 под втулку.
Со ссылкой на Фигуры 8-11, каждая периферийная опора 3 объединена с окружностью диска 21 с помощью рамы 31. Кривошип 32 соединяется с рамой 31 с помощью шпильки 322, последняя закреплена в паре коаксиальных отверстий 311. Качающийся рычаг 33 соединен с рамой 31 с помощью шпильки 35, последняя зацеплена соответственно в пару коаксиальных отверстий 312 и в отверстие 331. Соединительный стержень 34 соответственно присоединен к кривошипу 32 и к качающемуся рычагу 33 с помощью эксцентрика, зацепленного в отверстие 341, и с помощью шпильки 36, зацепленной в отверстие 342 и в отверстие 332.
Вилки 323 и 324, принадлежащие кривошипу 32, геометрически имеют конфигурацию с некоторым смещением Т (как можно видеть, например, на Фигуре 5) относительно плоскости, перпендикулярной шпильке 322 оси.
Трос 1 намотан на три оборота на шкив 2 посредством контакта с задней поверхностью каждого соединительного стержня 34.
Каждая периферийная опора 3 кинематически соединена с двумя смежными опорами с помощью объединения вилок 323 и 324, выполненных как одно целое с кривошипом 32, соответственно первая вилка 324а выполнена как одно целое с первым смежным кривошипом 32а, и вторая вилка 323b выполнена как одно целое со вторым смежным кривошипом 32b (как можно видеть, например, на Фигуре 10).
Каждая периферийная опора 3 представляет собой шарнирный механизм, кинематически эквивалентный шарнирному прямоугольнику, содержащему эксцентрик 321 в форме пояса, качающийся рычаг 33 и соединительный стержень 34, последний контактирует с участками троса 1.
Кинематическая цепочка, состоящая из периферийных опор 3, соединенных с помощью вилок 323 и 324, объединенных с эксцентриками 321, делает непостоянный контакт между тросом 1 и шкивом 2 способным создавать градиент натяжения изменяющимся вдоль участка троса 1 между концами 11 и 12.
Кинематическая цепочка, состоящая из периферийных опор 3, соединенных с помощью вилок 323 и 324, кроме создания непостоянного контакта между тросом 1 и шкивом 2 также обеспечивает подвижный контакт, приводимый в исполнение с помощью подходящих устройств привода (не показано) в соответствии с законом возвратно-поступательного движения.
Возвратно-поступательное движение каждой периферийной опоры 3 смещено относительно возвратно-поступательного движения смежных периферийных опор 3.
Смещение между вилками 323 и 325 каждой периферийной опоры 3 имеет произвольное значение от 0 градусов до 360 градусов.
Шкив 2, соединенный с кинематической цепью, состоящей из периферийных опор 3, достигает задачи изобретения с помощью изменения градиента натяжения троса 1, намотанной на периметр шкива 2 на несколько оборотов.
В частности, адаптированное решение позволяет:
- свести к нулю градиент натяжения вдоль участка троса, который не контактирует с периферийной опорой 3;
- обеспечивать винтовое наматывание троса 1 вдоль образующей, созданной контактной поверхностью каждого соединительного стержня 34;
- получить возвратно-поступательное и смещающее перемещение каждой периферийной опоры 3 посредством механизма, кинематически эквивалентного шарнирному прямоугольнику, в предпочтительном воплощении получаемому с помощью эксцентрикового ротора и соединительно стержня (Фигуры 2а, 2b и 2с).
Дополнительные конфигурации, считающиеся вариантами решения в соответствии с настоящим изобретением, описаны ниже.
Указанное возвратно-поступательное и смещающее перемещение каждой периферийной опоры 3 осуществляется посредством механизма, кинематически эквивалентного шарнирному пятистороннему устройству, в котором дополнительный рычаг (не показан) осуществляет возможность описания приблизительно квадратной траектории, путем перекрытия дополнительного гармонического движения.
Механизм, кинематически эквивалентный шарнирному пятистороннему устройству, относится к типу, в котором два из пяти рычагов (не показано) механически выполнены с помощью эксцентриковых роторов, оборудованных подшипниками, указанные эксцентриковые роторы имеют независимые скорости вращения и определенные фазы, одна из указанных независимых скоростей вращения предпочтительно в три раза больше остальных.
Радиальный профиль каждой периферийной опоры 3, измеренный в плоскости X-Z (Фигура 9), подвержен экспоненциальной функции, чтобы адаптироваться к градиенту натяжения, изменяемому вдоль троса 1.
Задняя поверхность каждого соединительного стержня 34 в контакте с участком троса 1 имеет профиль, измеренный в плоскости X-Y (Фигура 8), с закругленной по периметру формой (не показано).
Кинематическая цепочка, состоящая из периферийных опор 3, соединена с помощью карданных соединений или их эквивалентов.
Указанное возвратно-поступательное движение может создаваться кулачками или устройствами механического привода.
Указанное возвратно-поступательное движение может также создаваться электродвигателями или электромагнитными приводами.
Указанное возвратно-поступательное движение применяется в лебедке, содержащей устройство (не показано), способное запасать и быстро высвобождать в ходе натягивания определенное количество троса 1 с части 11 с высоким натяжением или части 12 с низким натяжением.
Указанное возвратно-поступательно движение применяется в лебедке, содержащей устройство (не показано), способное регулировать и ограничивать натяжение троса 1 от части 11 с высоким натяжением или части 12 с низким натяжением.
Лебедка, состоящая из по меньшей мере одного шкива 2, оборудованного периферийными опорами 3, поддерживающего и направляющего трос 1, намотанный на один оборот, предпочтительно, на три оборота, указанный трос 1 поддерживается с низким натяжением на участке 12.
Лебедка, состоящая из n шкивов 2, оборудованных периферийными опорами 3, по меньшей мере два их указанных шкивов имеют привод от двигателя.
В лебедке, состоящей из четырех шкивов 2 с приводом от двигателя, оборудованных периферийными опорами 3, указанные шкивы 2 расположены на вершинах идеального прямоугольника.
В лебедке, состоящей из четырех шкивов 2 с приводом от двигателя, оборудованных периферийными опорами 3, указанные шкивы 2 расположены вдоль не параллельных друг другу осей вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСОВЕРШЕНСТВОВАННЫЙ ШКИВ ДЛЯ ВЫСОКОЭФФЕКТИВНОЙ ЛЕБЕДКИ | 2014 |
|
RU2647821C2 |
| Судовая аппарель | 1973 |
|
SU1207392A3 |
| СПОСОБ ПРОИЗВОДСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПРИ ПОМОЩИ ВЕТРЯНОЙ СИСТЕМЫ | 2007 |
|
RU2436992C2 |
| ОПУСКАЕМЫЙ ПОД ПЕРЕКРЫТИЕ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2000 |
|
RU2247693C2 |
| Аэростатная лебёдка | 2021 |
|
RU2776362C1 |
| ВОЛНОВАЯ ГИДРОЭЛЕКТРОСТАНЦИЯ А.Г.СУДИЛОВСКОГО | 1988 |
|
RU2020264C1 |
| Возвратно-поступательный ножной привод для велосипеда | 2022 |
|
RU2780873C1 |
| ПОПЛАВКОВАЯ ВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2016 |
|
RU2684857C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| Установка для перемешивания жидкого навоза в круглых навозохранилищах | 1983 |
|
SU1132817A1 |
Усовершенствованный шкив (2) для лебедки контактирует с по меньшей мере одним участком лебедки (1) от входного участка (11), соединенного с рабочей нагрузкой, до выходного участка (12) с минимальным или нулевым натяжением, такой шкив (2) содержит кинематическую цепь периферийных опор (3). Изобретение обеспечивает снижение потерь энергии из-за трения и снижение износа каната. 6 з.п. ф-лы, 13 ил.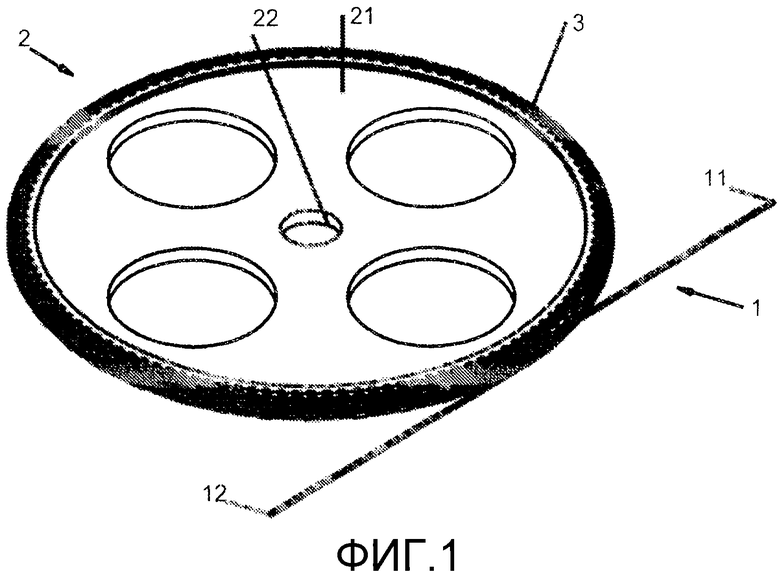
1. Усовершенствованный шкив (2) для лебедки в контакте с по меньшей мере одним участком троса (1) между входным участком (11), соединенным с рабочей нагрузкой, и выходным участком (12) с минимальным или нулевым натяжением, при этом усовершенствованный шкив (2) содержит кинематическую цепь, сформированную из периферийных опор (3), каждая из которых представляет собой шарнирный четырехугольник, состоящий из по меньшей мере одной рамы (31), выполненной как одно целое с по меньшей мере одним диском (21), по меньшей мере одного кривошипа (32), по меньшей мере одного качающегося рычага (33) и по меньшей мере одного соединительного стержня (34) в контакте с указанным участком троса (1), отличающийся тем, что каждая из указанных периферийных опор (3) соединена с двумя указанными смежными периферийными опорами (3) путем соединения вилок (323, 324), выполненных как одно целое с кривошипом (32), при этом соответственно первая вилка (324а) выполнена как одно целое с первым смежным кривошипом (32а) и вторая вилка (323b) выполнена как одно целое со вторым кривошипом (32b).
2. Усовершенствованный шкив по п. 1, отличающийся тем, что каждая из периферийных опор (3) приспособлена для приведения в действие с помощью двигателя по закону возвратно-поступательного движения.
3. Усовершенствованный шкив (2) по п. 1, отличающийся тем, что кривошип (32) состоит из эксцентрика (321) в форме пояска, чья внутренняя ось занята шпилькой (322), на концах которой размещены указанные вилки (323, 324), и тем, что указанные вилки (323, 324) имеют геометрическую конфигурацию со смещением (Т) относительно плоскости, перпендикулярной указанной оси шпильки (322).
4. Усовершенствованный шкив (2) по п. 3, отличающийся тем, что указанное возвратно-поступательное и смещающее движение каждой из указанных периферийных опор (3) выполняется посредством шарнирного устройства.
5. Усовершенствованный шкив (2) по п. 4, отличающийся тем, что два из пяти рычагов, составляющих шарнирное устройство, механически выполнены с помощью эксцентриковых роторов, имеющих независимые скорости вращения и определенные фазы, при этом одна из независимых скоростей вращения в три раза больше остальных.
6. Усовершенствованный шкив (2) по любому из пп.1-5, отличающийся тем, что задняя поверхность каждого из указанных соединительных стержней (34) в контакте с указанным участком троса (1) имеет профиль, измеренный в плоскости, перпендикулярной указанной оси вращения, с закругленной по периметру формой.
7. Усовершенствованный шкив (2) по любому из пп.1-5, отличающийся тем, что указанная кинематическая цепь, состоящая из указанных периферийных опор (3), соединяется с помощью карданных соединений или их эквивалентов и/или указанное возвратно-поступательное движение создается кулачками или механическими устройствами привода, электроприводами или электромагнитными приводами.
| ДАТЧИК ДАВЛЕНИЯ С ЧАСТОТНЫМ ВЫХОДОМ | 0 |
|
SU168505A1 |
| WO 2011121272 A1, 06.10.2011 | |||
| US 3105676 A, 01 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Способ кондиционирования хлористого калия | 1983 |
|
SU1211248A1 |
| КАНАТОВЕДУЩИЙ ШКИВ | 0 |
|
SU291863A1 |
| Канатоведущий барабан | 1979 |
|
SU1117978A1 |

