Предпосылки к созданию изобретения
Настоящее изобретение имеет отношение к способу и устройству для электропитания с резервированием нескольких серводвигателей или приводных электродвигателей при помощи общего силового электронного блока, в частности, на воздушном судне. До недавнего времени в технологии приводов современных гражданских воздушных судов доминировали гидроприводы, например, для посадочных щитков, шасси, рулей высоты и т.п. За счет быстрого развития в области микротехнологии и технологии силовых полупроводниковых приборов в течение последних 20 лет, особенно в том, что касается конструктивных размеров, частоты коммутации, термостойкости и электрической прочности, электроприводы, то есть серводвигатели и приводные электродвигатели, также стали привлекательными для использования в авиационной промышленности. В дополнение к их низким расходам на эксплуатацию электроприводы являются высокоэффективными и гибкими. Существует потребность в силовой электронике и двигателях, которые адаптированы друг к другу так, что они позволяют оптимально удовлетворять специфические требования авиационной промышленности по весу, размеру и надежности.
Одним эффективным решением для снижения веса и экономии пространства (размеров) является совместное использование силового электронного блока для различных систем воздушного судна, которые содержат серводвигатели или приводные электродвигатели. Для этого необходимо повысить коэффициент готовности общего силового электронного блока за счет повышения избыточности, при одновременном снижении полного веса воздушного судна.
Более высокая степень резервирования становится менее привлекательной, когда она реализована за счет умножения (повышения) числа независимых блоков, которые, однако, не обладают отказоустойчивостью к индивидуальным дефектам. Этот простой вариант повышения степени резервирования не только неблагоприятно увеличивает вес и требует дополнительного пространства для установки оборудования, но он также связан с тем недостатком, что, например, 50% транспортируемого веса обычно не используют в системе с двойным резервирование, причем 50% мощности теряется, если возникает индивидуальный дефект. Кроме того, вероятность возникновения отказов повышается за счет увеличения полного числа компонентов, необходимого для выполнения заданной функции, если не повышать отказоустойчивость к таким индивидуальным дефектам.
Сущность изобретения
Задачей настоящего изобретения является создание улучшенного способа и усовершенствованного устройства для электропитания с резервированием нескольких серводвигателей или приводных электродвигателей при помощи общего силового электронного блока.
В соответствии с примерным вариантом настоящего изобретения предлагается способ электропитания с резервированием нескольких серводвигателей или приводных электродвигателей при помощи общего силового электронного блока, в частности, на воздушном судне, причем силовой электронный блок содержит несколько электронных блоков управления двигателями, при этом электродвигатели работают с номинальной мощностью, если электронные блоки управления двигателями являются полностью функциональными (сохраняют полные функциональные возможности). В соответствии с примерным вариантом настоящего изобретения двигатели работают с имеющейся остаточной мощностью блоков управления двигателями, если происходит частичный отказ блоков управления двигателями.
В соответствии с примерным вариантом заявленного способа блоки управления двигателями соответственно служат для генерирования части x фаз, с которыми двигатели работают, причем двигатели работают с еще сохраненными фазами блоков управления двигателями, если происходит частичный отказ блоков управления двигателями.
В соответствии с примерным вариантом заявленного способа блоки управления двигателями, в частности два блока управления двигателями, соответственно служат для генерирования половины x/2 числа x фаз, с которыми работают двигатели, в частности два двигателя.
В соответствии с другим примерным вариантом заявленного способа блоки управления двигателями соответственно служат для генерирования полного числа x фаз, с которыми двигатели работают, причем двигатели работают с пониженной мощностью еще сохранивших функциональные возможности блоков управления двигателями, если происходит частичный отказ блоков управления двигателями.
В соответствии с примерным вариантом заявленного способа двигатели работают последовательно.
В соответствии с другим примерным вариантом заявленного способа, двигатели работают одновременно.
В соответствии с примерным вариантом заявленного способа двигатели приводят в действие привод посадочного щитка и основной опоры шасси воздушного судна.
В соответствии с примерным вариантом заявленного способа двигатели последовательно приводят в действие привод посадочного щитка и основной опоры шасси воздушного судна, причем энергию, генерируемую при помощи одного из двигателей, используют для приведения в действие других двигателей в случае дефицита энергии
В соответствии с другим примерным вариантом заявленного способа двигатели приводят в действие дуплексный привод посадочного щитка воздушного судна.
В соответствии с примерным вариантом настоящего изобретения двигатели преимущественно принадлежат к одному классу по мощности и имеют одинаковую выходную мощность, особенно когда они работают одновременно.
В соответствии с примерным вариантом настоящего изобретения двигатели пространственно расположены близко друг к другу, особенно когда они работают одновременно.
В соответствии с примерным вариантом заявленного способа все двигатели работают с питанием от еще функциональных блоков управления двигателями, если происходит отказ части блоков управления двигателями.
В соответствии с другим примерным вариантом заявленного способа все двигатели работают с еще имеющейся остаточной мощностью блоков управления двигателями, если происходит частичный отказ блоков управления двигателями.
Предлагается также устройство для электропитания с резервированием нескольких серводвигателей или приводных электродвигателей при помощи общего силового электронного блока, в частности, на воздушном судне, в котором силовой электронный блок содержит несколько электронных блоков управления двигателями и коммутационное устройство для избирательного соединения блоков управления двигателями с двигателями и в котором электродвигатели могут работать с номинальной мощностью, если электронные блоки управления двигателями являются полностью функциональными. В соответствии с примерным вариантом настоящего изобретения двигатели могут работать с имеющейся остаточной мощностью блоков управления двигателями при помощи коммутационного устройства, если происходит частичный отказ блоков управления двигателями.
В соответствии с примерным вариантом заявленного устройства блоки управления двигателями соответственно служат для генерирования части x фаз, с которыми двигатели работают, причем двигатели могут работать с еще сохраненными фазами блоков управления двигателями при помощи коммутационного устройства, если происходит частичный отказ блоков управления двигателями.
В соответствии с примерным вариантом заявленного устройства блоки управления двигателями, в частности два блока управления двигателями, соответственно служат для генерирования половины x/2 числа x фаз, с которыми могут работать двигатели, в частности два двигателя.
В соответствии с другим примерным вариантом заявленного устройства блоки управления двигателями соответственно служат для генерирования полного числа x фаз, с которыми двигатели могут работать, причем двигатели могут работать с пониженной мощностью еще функциональных блоков управления двигателями при помощи коммутационного устройства, если происходит частичный отказ блоков управления двигателями.
В соответствии с примерным вариантом заявленного устройства двигатели могут работать последовательно при помощи коммутационного устройства.
В соответствии с другим примерным вариантом заявленного устройства двигатели могут работать одновременно при помощи коммутационного устройства.
В соответствии с примерным вариантом заявленного устройства двигатели приводят в действие привод посадочного щитка и основной опоры шасси воздушного судна.
В соответствии с примерным вариантом заявленного устройства двигатели последовательно приводят в действие привод посадочного щитка и основной опоры шасси воздушного судна, причем энергию, генерируемую при помощи одного из двигателей, используют для приведения в действие других двигателей в случае дефицита энергии.
В соответствии с примерным вариантом заявленного устройства двигатели приводят в действие дуплексный привод посадочного щитка воздушного судна.
В соответствии с примерным вариантом настоящего изобретения двигатели принадлежат к одному классу по мощности и имеют одинаковую выходную мощность, особенно когда они работают одновременно.
В соответствии с примерным вариантом настоящего изобретения двигатели расположены пространственно близко друг к другу, особенно когда они работают одновременно.
В соответствии с примерным вариантом заявленного устройства все двигатели могут работать с мощностью еще функциональных блоков управления двигателями при помощи коммутационного устройства, если происходит отказ части блоков управления двигателями.
В соответствии с примерным вариантом заявленного устройства, все двигатели могут работать с еще имеющейся остаточной мощностью блоков управления двигателями при помощи коммутационного устройства, если происходит частичный отказ блоков управления двигателями.
В отличие от обычного резервирования "комплексное резервирование" в соответствии с настоящим изобретением означает, что сначала создают автономность одного блока или функции, а затем производят секционирование так, что отказоустойчивость к индивидуальным дефектам повышается и одновременно снижается мощность на индивидуальный дефект.
За счет существенного повышения коэффициента готовности настоящее изобретение позволяет последовательно использовать множество систем потребителей с аналогичными характеристиками потребления энергии и с продолжительностью цикла, а именно без снижения полного коэффициента готовности участвующих потребителей. Такое решение просто требует использования дополнительных силовых соединений, а также выполнения функции переключения между потребителями.
В соответствии с примерным вариантом настоящего изобретения электродвигатели, например, действуют как преобразователи электромеханической энергии соответствующей системы воздушного судна и принадлежат к одному классу по мощности, причем электродвигатели расположены так, что пространственно они не слишком удалены от используемой совместно силовой электроники. Это приводит не только к снижению веса проводов, но в первую очередь уменьшает паразитную емкость линий, которая оказывает отрицательное влияние на характеристики блока силовой электроники (силового электронного блока) и блока управления. Такое совместное использование может быть реализовано в системах, имеющих не совпадающие по времени рабочие интервалы, то есть при последовательном многократном использовании. Однако можно также реализовать совокупность с синхронным использованием, то есть с одновременным использованием, причем последний вариант является предпочтительным в качестве резерва для идентичных смежных систем.
Привод посадочного щитка и привод основной опоры шасси являются примерами двух идеальных систем для последовательного использования, так как на них требуется последовательно подавать питание только в течение относительно короткого периода времени, однако с очень высокой надежностью. Кроме того, указанные системы воздушного судна соответствуют критерию "сходства мощности", а также пространственной близости. Что касается последовательного использования силовой электроники, потенциал синергии (совместного использования) системы посадочного щитка и системы шасси с электрическим приводом является особенно интересным, так как активная и пассивная фазы обеих систем могут быть использованы для задач рекуперации энергии.
После взлета втягивание (уборка) посадочных щитков с помощью воздействующего на них воздуха может быть использовано для генерирования энергии для уборки (подъема) шасси в случае дефицита энергии или отказа систем электропитания. Аналогичные обстоятельства возникают при так называемых маневрах ухода на второй круг. Наоборот, при приземлении требуется энергия для выпуска посадочных щитков, причем эта энергия может быть получена, когда шасси выпущено. Повышение надежности или степени резервирования такого объединенного блока по сравнению с отдельными децентрализированными блоками получают за счет желательной комбинации и объединения различных узлов силовой электроники в один блок. Однако задачей является не простая установка различных обычных блоков в общий кожух, а скорее снижение веса и одновременное повышение степени резервирования силовой электроники.
Варианты настоящего изобретения описаны далее со ссылкой на чертежи.
Краткое описание чертежей
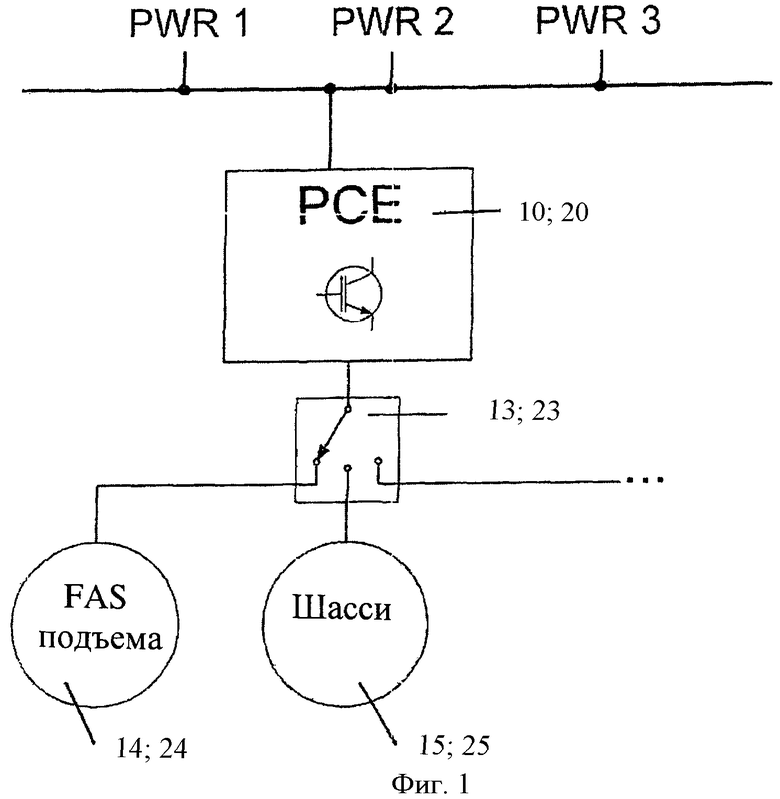
На фиг.1 показана сильно упрощенная блок-схема последовательного использования общего (объединенного) блока силовой электроники различных систем воздушного судна, которые соответственно содержат серводвигатели или приводные электродвигатели, получающие питание от блока силовой электроники.
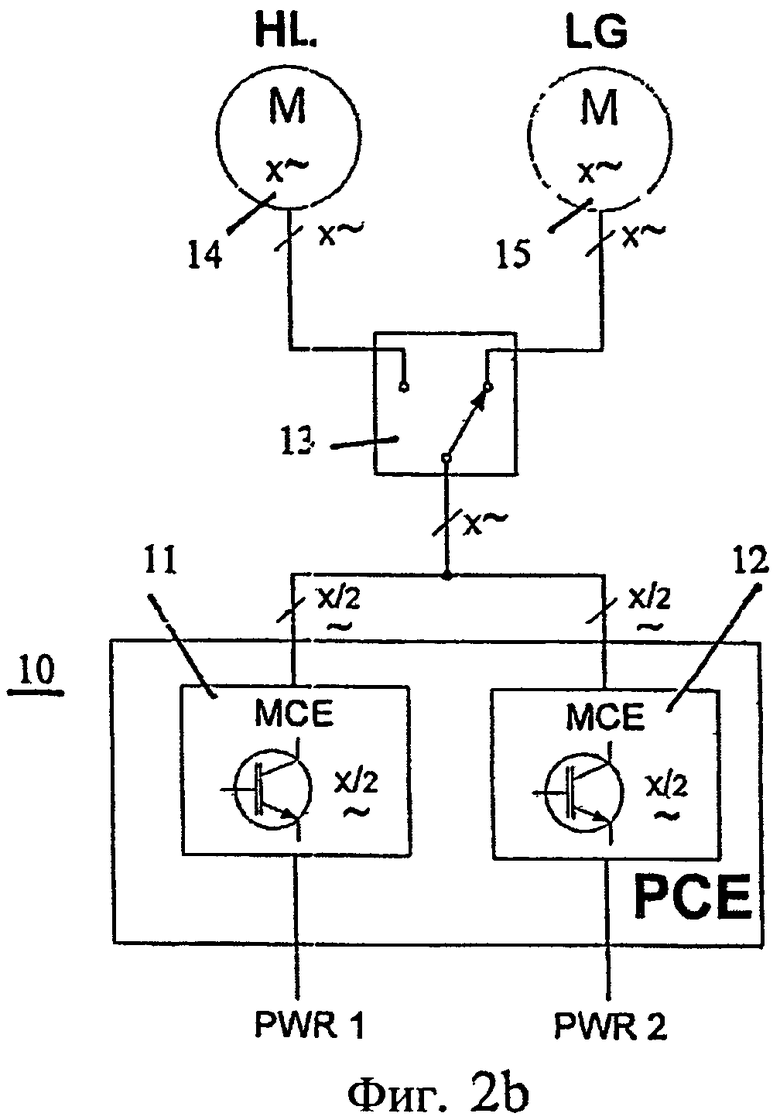
На фиг.2а) и b) показаны принципиальные электрические схемы системы в соответствии с одним из вариантов изобретения, в которой общий блок силовой электроники используют последовательно, например, в системе посадочного щитка и шасси, при полностью функциональном нормальном рабочем режиме.
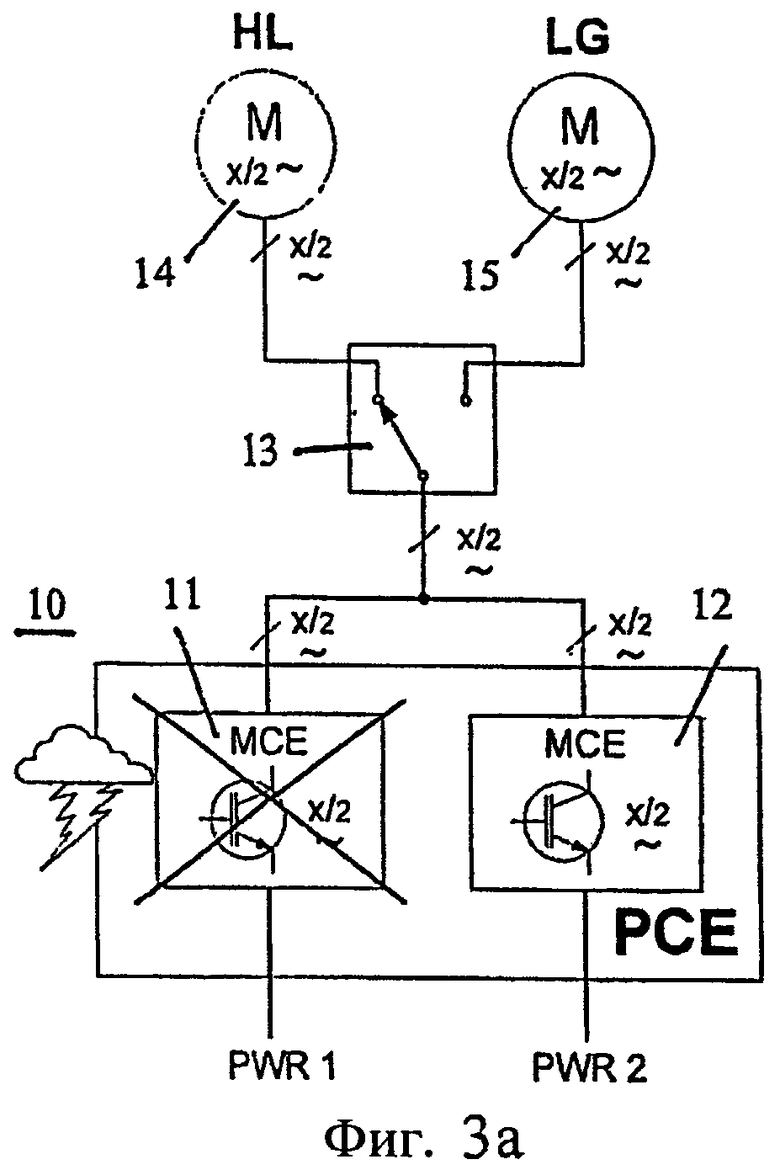
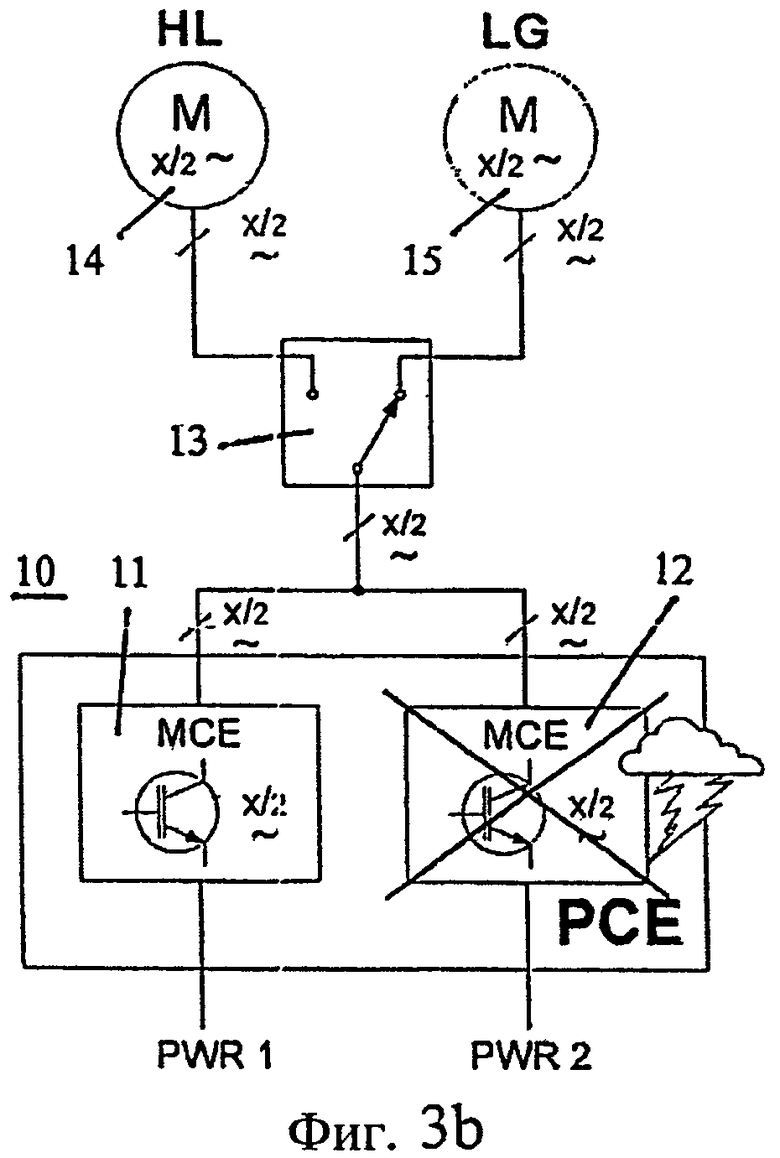
На фиг.3а) и b) показаны принципиальные электрические схемы системы, в которой общий блок силовой электроники используют последовательно, например, в системе посадочного щитка и шасси в соответствии с вариантом изобретения, показанным на фиг.2, при возникновении дефекта в силовой электронике.
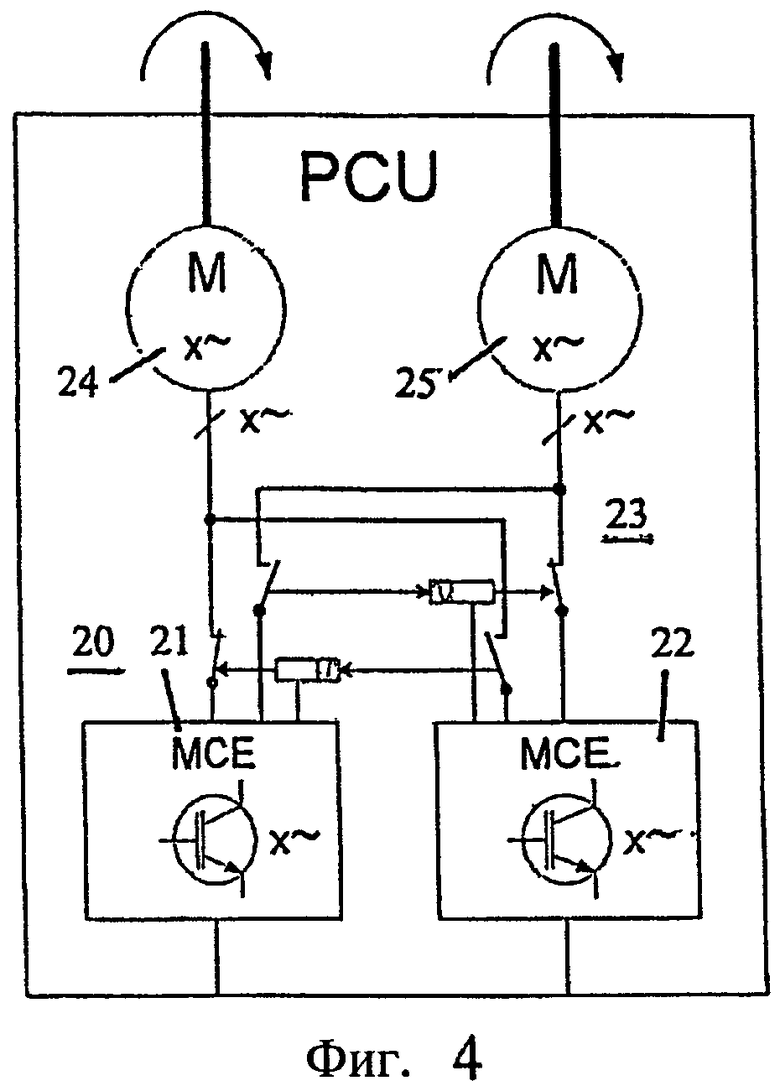
На фиг.4 показана принципиальная электрическая схема системы в соответствии с одним из вариантов изобретения, в которой два вполне законченных блока управления двигателями с перестраиваемой конфигурацией используют для управления двумя двигателями одновременно, например, в дуплексном приводе центрального привода посадочного щитка, при полностью функциональном нормальном рабочем режиме
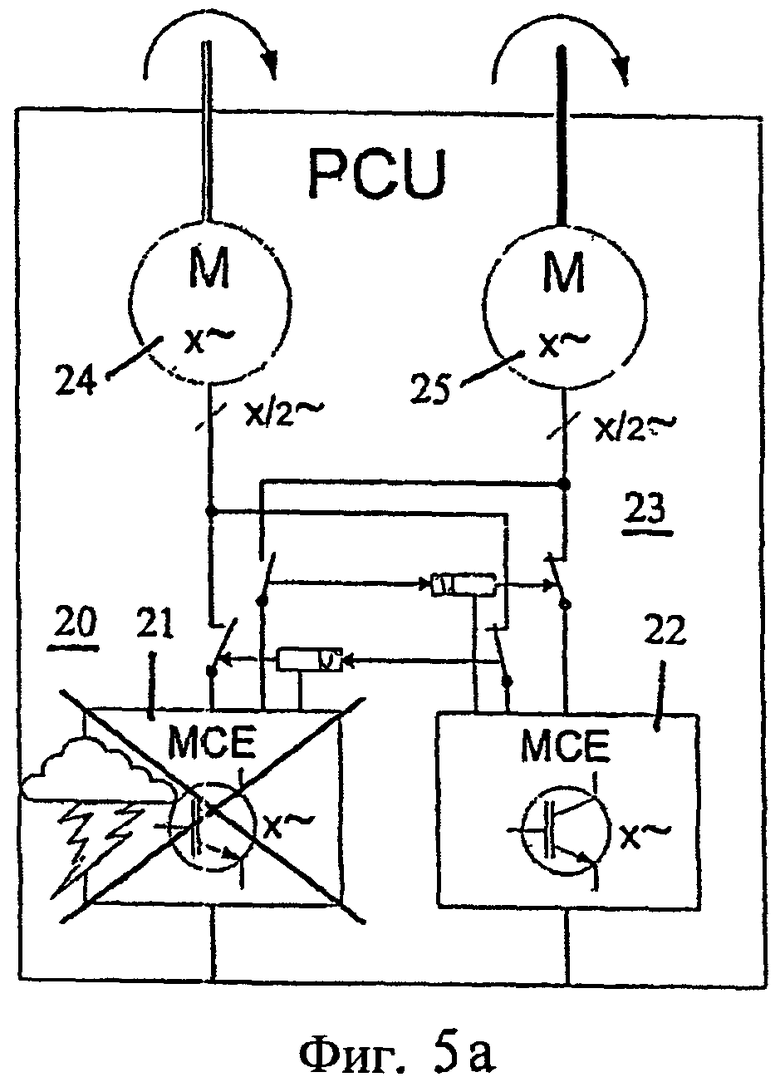
На фиг.5а)-е) показаны соответственно принципиальные электрические схемы системы в соответствии с одним из вариантов изобретения, показанной на фиг.4, в которой два вполне законченных блока управления двигателями реконфигурированы по причине возникновения в них различных дефектов, для того, чтобы их можно было использовать для питания одного или двух двигателей, имеющихся в дуплексном приводе.
Подробное описание изобретения
На фиг.1 показана упрощенная блок-схема последовательного или альтернативного использования общего блока 10; 20 силовой электроники (РСЕ, Power Control Electronics) в различных системах воздушного судна, в частности в системе high lift system (High Lift FAS) и шасси, которые соответственно содержат серводвигатели или приводные электродвигатели 14, 24 и 15; 25, которые получают питание от общего блока 10; 20 силовой электроники и подключаются избирательно, то есть в соответствии с требованиями, к блоку 10; 20 силовой электроники при помощи коммутационного устройства 13; 23. Блок 10; 20 силовой электроники содержит различные источники 1-3 питания PWR с резервированием, схематично показанные на фиг.1.
На фиг.2а) и b) показаны соответственно принципиальные электрические схемы системы в соответствии с одним из вариантов изобретения, в которой общий блок 10 силовой электроники РСЕ (Power Control Electronics) используют последовательно, например, в системе посадочного щитка и шасси, при полностью функциональном нормальном рабочем режиме.
Устройство для электропитания с резервированием нескольких серводвигателей или приводных электродвигателей, а в этом случае двух двигателей 14, 15, при помощи общего силового электронного блока 10 (РСЕ) содержит несколько электронных блоков 11, 12 управления двигателями МСЕ (Motor Control Electronics), а в этом случае два блока управления двигателями, и коммутационное устройство 13 для избирательного соединения блоков 11, 12 управления двигателями с двигателями 14, 15, чтобы подавать питание на эти двигатели (а именно на двигатель 14 на фиг.2а) и на двигатель 15 на фиг.2b). Когда электронные блоки управления двигателями 11, 12 являются полностью функциональными, электродвигатели 11, 12 работают соответственно с номинальной мощностью.
Два блока 11, 12 управления двигателями соответственно служат для генерирования части x фаз, а именно половины x/2 x фаз, с которыми двигатели работают, причем два двигателя 14, 15 работают с еще сохраненными фазами блоков 11, 12 управления двигателями при помощи коммутационного устройства 13, если происходит частичный отказ блоков 11, 12 управления двигателями, то есть оба двигателя 14, 15 работают с еще имеющейся остаточной мощностью блоков 11, 12 управления двигателями при помощи коммутационного устройства 13, если происходит частичный отказ блоков 11, 12 управления двигателями.
Следовательно, блок 10 РСЕ является "внутренне резервированным", то есть полное число фаз х делят на два отдельных и автономных преобразователя (МСЕ), то есть блоки 11, 12 управления двигателями соответственно служат для генерирования половины фаз. Это не только исключает полный отказ при возникновении индивидуального дефекта, но одновременно позволяет снизить вес устройства по сравнению с двумя независимыми блоками РСЕ, каждый из которых имеет полное число фаз.
Варианты, показанные на фиг.3а) и b), позволяют оценить воздействие индивидуального дефекта в одном из двух блоков 11, 12 МСЕ. Это приводит к потере половины фазовых проводов в блоке 10 РСЕ и проявляется в снижении потребления системами потребителей - что показано как х/2 на соответствующих чертежах - но не ведет к полному отказу одной из двух систем. Условие "внутреннего резервирования" было использовано в примере последовательного использования. Эта концепция не является новой сама по себе, однако в комбинации с параллельным использованием в различных системах воздушного судна она открывает новые возможности проектирования систем с пониженным весом и повышенной надежностью. В этом контексте, можно предусмотреть следующие усовершенствования. Если удвоить число фаз каждого блока управления двигателем (МСЕ) в описанном выше примере, то есть если каждый блок МСЕ будет представлять собой полнофазный модуль питания двигателя, и переключатель модифицировать так, чтобы фазы модульных блоков управления двигателями МСЕ могли вместе или отдельно переключаться на один соответствующий двигатель, то тогда два двигателя могут одновременно использовать один МСЕ модуль. В сочетании с описанной выше конфигурацией последовательного использования это позволяет получить совершенно новые варианты конфигурации. Этот ход мыслей служит переходом к новому варианту, в котором одновременное использование блока силовой электроники обсуждается более подробно. Упомянутую выше обычную систему центрального привода посадочных щитков PCU (Power Control Unit), имеющую дуплексные электродвигатели, расположенные в фюзеляже, используют в качестве примера одновременного использования блока силовой электроники, описанного далее со ссылкой на фиг.4 и 5а)-е). В этой совокупности каждый из двух двигателей 24, 25 в нормальном рабочем режиме подключен к отдельному преобразователю, то есть к отдельному блоку 21, 22 управления двигателем (Motor Control Electronics - МСЕ), причем это соответствует, в принципе, получению питания обычным полностью гидравлическим блоком регулирования мощности (PCU) от двух независимых гидравлических систем. Предусмотрено коммутационное устройство 23 для избирательного подключения блоков 21, 22 МСЕ к двигателям 24, 25 в соответствии с требованиями. Если один из блоков 21, 22 МСЕ выходит из строя, то оставшийся работоспособный блок МСЕ обеспечивает продолжение работы обоих двигателей 24, 25 с пониженной мощностью - если топология двигателей выбрана правильно. Если повреждены индивидуальные обмотки одного из двух двигателя вместо дефекта блока или в дополнение к нему, то можно избирательно подавать только неповрежденные фазы или подавать полное питание только на неповрежденный двигатель, если известны соответствующие фазы обоих двигателей. В этом конкретном варианте указанная концепция одновременного использования является "резервной" только в случае возникновения дефекта описанного типа.
Как уже было указано здесь выше, внутренняя структура блока регулирования мощности (PCU) преднамеренно реализована с использованием двух полнофазных блоков 21, 22 МСЕ. Следует иметь в виду, что в примерах последовательного использования, которые были описаны со ссылкой на фиг.2а) и b), так же как и на фиг. 3а) и b), используют блок 10 силовой электроники (РСЕ), который содержит несколько - а в описанном примере два - дополняющих (комплементарных) блока 11, 12, которые соответственно содержат только часть фазных проводов, в то время как вариант с одновременным использованием, описанный далее со ссылкой на фиг.4 и 5а)-с), содержит два полных и независимых блока 21, 22, которые подают все фазы.
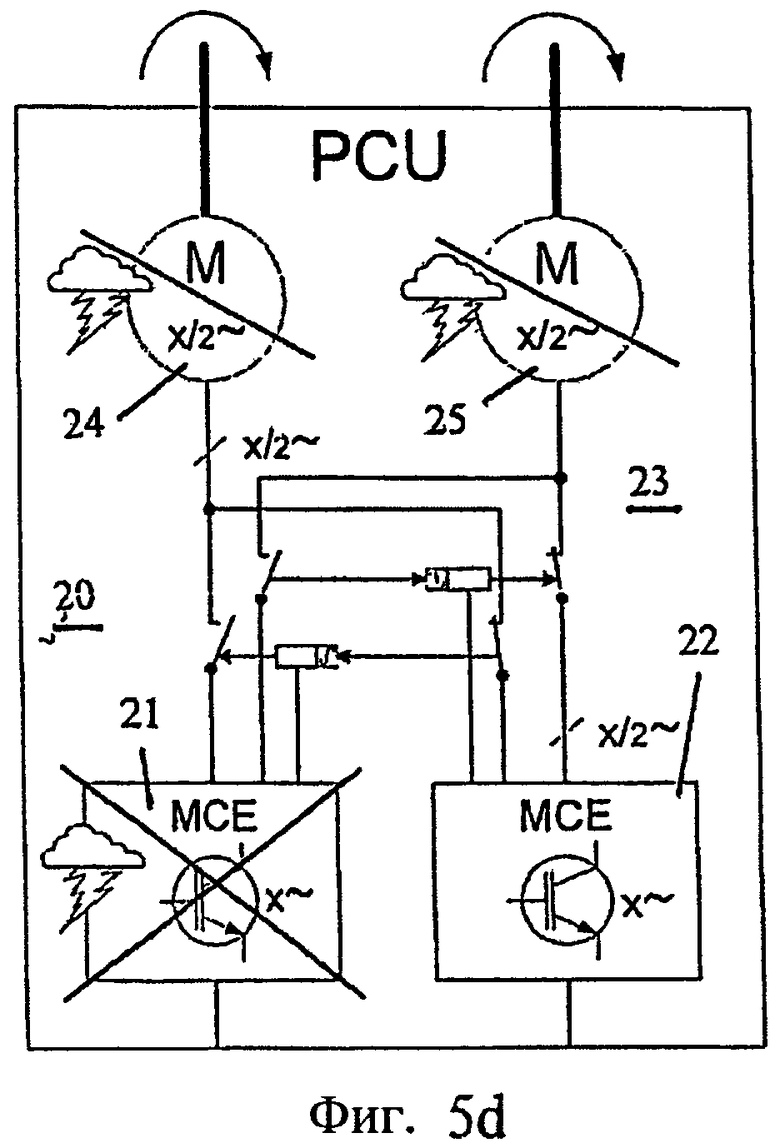
Совершенно очевидно, что конструктивное исполнение блока 10 РСЕ по первому варианту последовательного использования может быть перенесено в блоки 21, 22 МСЕ по второму варианту, за счет чего повышается отказоустойчивость и, следовательно, существенно расширяются возможности работы, несмотря на множество дефектов. Графическое представление всех возможных комбинаций намеренно опущено. Различные отказы системы, показанной на фиг.4, а также управление ею описаны далее со ссылкой на фиг.5а)-5е).
Фиг.5а): одновременное использование блока 20 силовой электроники при полном отказе блока 21 МСЕ. Оба двигателя 24, 25 получают питание от работоспособного блока 22 МСЕ. Это означает исключение половины активных фаз двигателя и снижение выходной мощности.
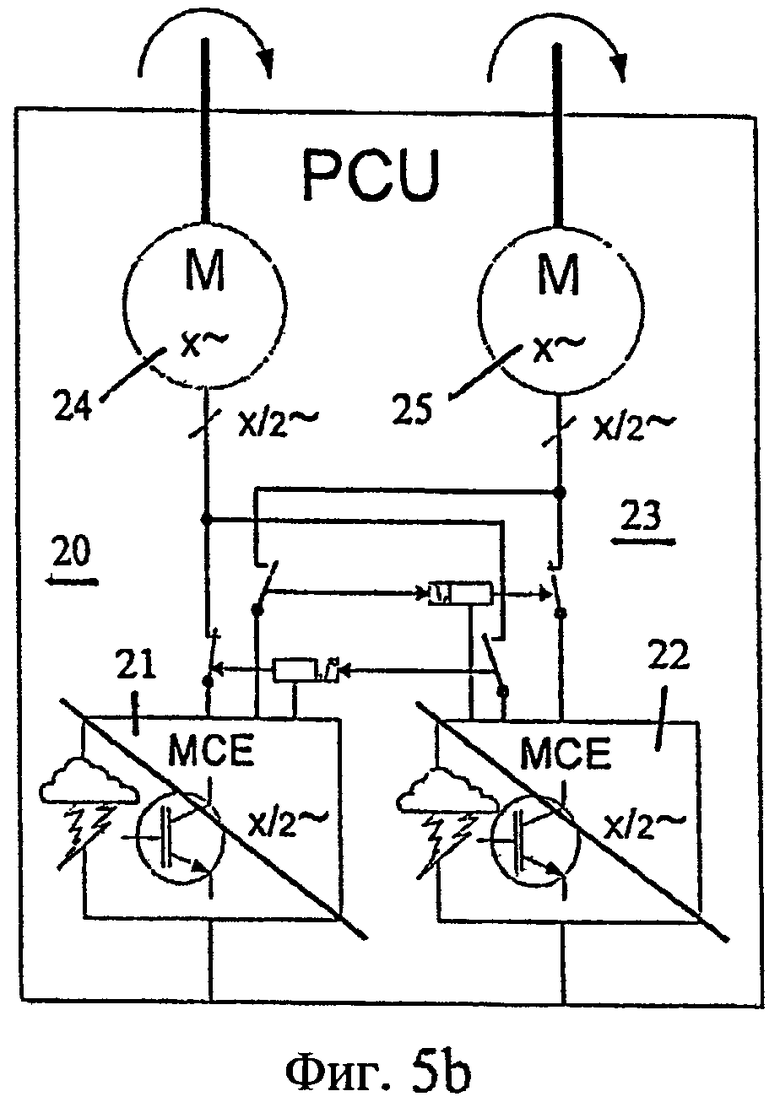
Фиг.5b): частичный отказ двух блоков 21, 22 МСЕ. Это ведет к такому же результату, что и в случае, показанном на фиг.5а), однако питание поступает от двух деградированных (имеющих ухудшенные характеристики. - Прим. переводчика) блоков 21, 22 МСЕ.
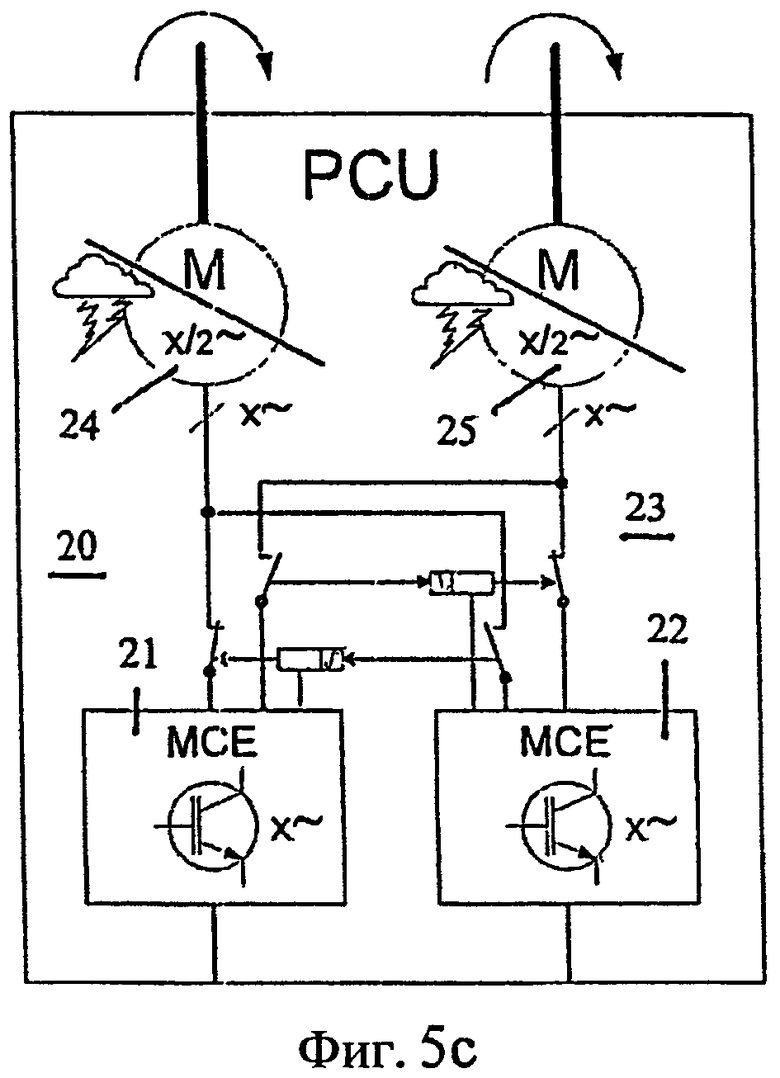
Фиг.5с): частичный отказ двух двигателей 24, 25. Оба блока МСЕ являются полностью работоспособными. Это ведет к такому же результату, что и в описанном выше случае.
Фиг.5d): полный отказ блока 21 МСЕ и частичный отказ двух двигателей 24, 25. Блок 22 МСЕ подает питание на оба двигателя 24, 25 с половиной соответствующего числа фаз. Это ведет к такому же результату, что и в случае, показанном на фиг.5а) и b) соответственно.
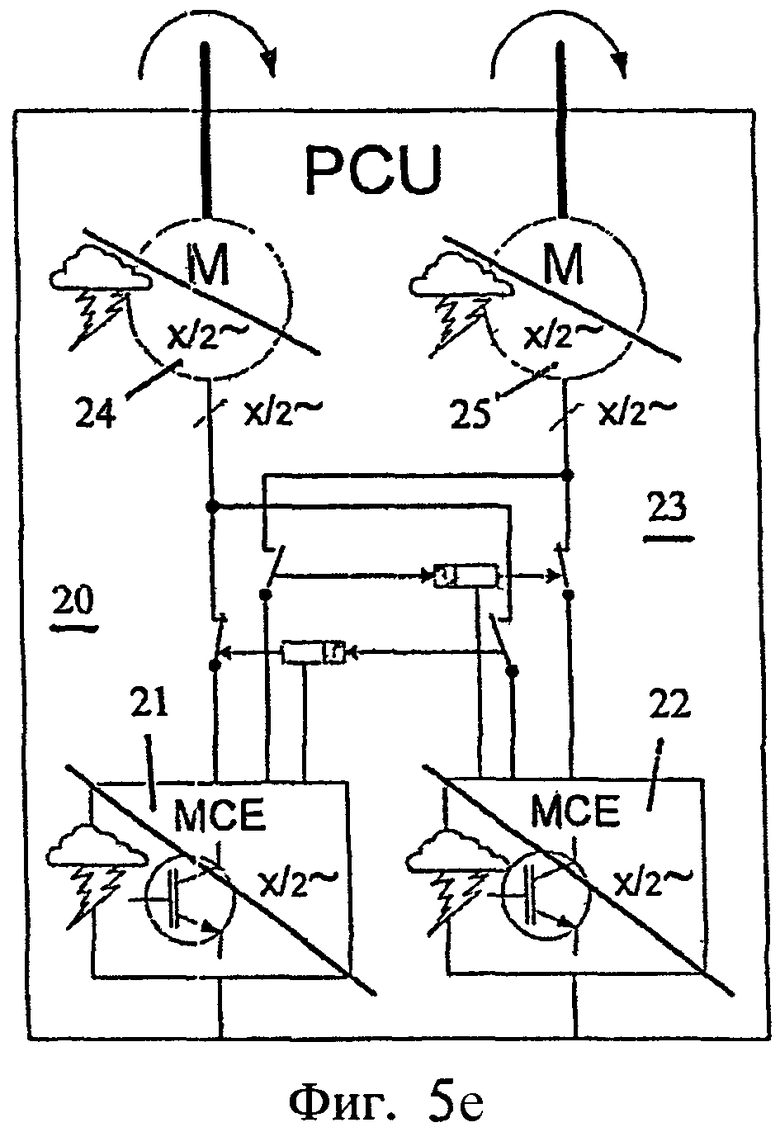
Фиг.5е): частичный отказ двух блоков 21, 22 МСЕ и двух двигателей 24, 25. Двигатели 24, 25 все еще получают питание от соответствующих блоков 21 или 22 МСЕ, аналогично нормальному рабочему режиму. Снижается только выходная мощность двигателей. Это ведет к такому же результату, что и в описанном выше случае.
В сценариях отказа двигателя, описанных со ссылкой на фиг.5с)-е), всегда предполагали, что происходит частичный отказ двух двигателей 24, 25, несмотря на то, что это маловероятно. Однако следует иметь в виду, что дефект только в одном двигателе будет приводить к такому же результату, так как дефект будет обнаружен и энергопотребление обоих двигателей будет снижено на энергопотребление дефектного двигателя. Дефектную фазу соответствующего двигателя можно найти при помощи измерений, проведенных при его работе.
Подводя итог, можно сказать, что описанная концепция совершенно очевидно является результатом внедрения последовательного использования источника питания системами при короткой продолжительности цикла нагружения. Результирующее требование повышения коэффициента готовности требует повышения степени резервирования Эта повышенная степень резервирования не будет связана с обычным увеличением веса и размеров, которые могли бы снизить конкурентоспособность системного решения. Комплексное резервирование, которое основано на автомизации и разделении исходной функции, не только позволяет выполнять соответствующие требования к весу и размерам, но также позволяет реализовать различные дополнительные конфигурации системы для различных сценариев дефектов, которые повышают гибкость и полную степень готовности системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАСПРЕДЕЛЕНИЯ ЭНЕРГИИ И ПРИВЕДЕНИЯ В ДВИЖЕНИЕ СУДНА | 2008 |
|
RU2487048C2 |
| СХЕМА И ТОПОЛОГИЯ ВЫСОКОНАДЕЖНОЙ СИСТЕМЫ СИЛОВОЙ ЭЛЕКТРОНИКИ | 2009 |
|
RU2533317C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ И МАНЕВРИРОВАНИЯ | 2004 |
|
RU2403180C2 |
| ПРИВОД | 2007 |
|
RU2466316C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СПОСОБ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В ЛЕТАТЕЛЬНОМ АППАРАТЕ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ КОНСТРУКЦИЯ ДЛЯ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2012 |
|
RU2610358C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| КОМБИНИРОВАННОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕДАЧЕЙ МОЩНОСТИ МЕЖДУ ДВУМЯ ЦЕНТРАМИ СЕТИ ПОСТОЯННОГО ТОКА И ПИТАНИЯ ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2407128C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
Изобретение имеет отношение к способу и устройству для электропитания с резервированием нескольких серводвигателей или приводных двигателей при помощи общего силового блока, в частности, на воздушном судне. Для этого способ и устройство для электропитания с резервированием нескольких серводвигателей или приводных электродвигателей при помощи общего силового электронного блока, в частности, на воздушном судне содержит силовой электронный блок с несколькими электронными блоками управления двигателями, при этом электродвигатели работают с номинальной мощностью, если электронные блоки управления двигателями являются полностью функциональными. В соответствии с настоящим изобретением двигатели работают с имеющейся остаточной мощностью блоков управления двигателями, если происходит частичный отказ блоков управления двигателями. Двигатели в соответствии с предпочтительными вариантами изобретения могут работать последовательно или одновременно. 2 н. и 22 з.п. ф-лы, 11 ил.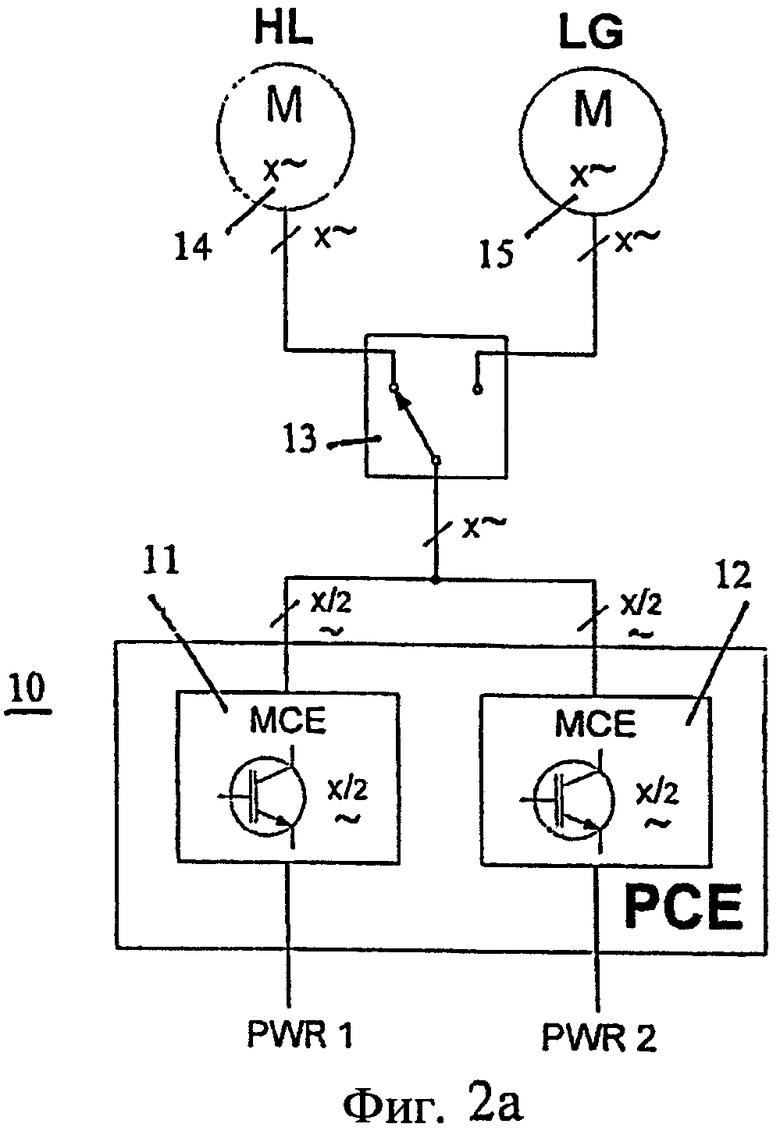
1. Способ электропитания с резервированием нескольких серводвигателей или приводных электродвигателей (14, 15; 24, 25) при помощи общего силового электронного блока (10; 20), в частности, на воздушном судне, причем силовой электронный блок (10, 20) содержит несколько электронных блоков (11, 12; 21, 22) управления двигателями, при этом электродвигатели (14, 15; 24, 25) работают с номинальной мощностью, если электронные блоки (11, 12; 21, 22) управления двигателями являются полностью функциональными и работают с имеющейся остаточной мощностью блоков (11, 12; 21, 22) управления двигателями, если происходит частичный отказ блоков (11, 12; 21, 22) управления двигателями, при этом блоки (11, 12) управления двигателями служат для генерирования части x фаз, с которыми двигатели работают, причем двигатели (14, 15) работают с еще сохраненными фазами блоков (11, 12) управления двигателями, если происходит частичный отказ блоков (11, 12) управления двигателями.
2. Способ по п.1, в котором блоки (11, 12) управления двигателями, в частности два блока (11, 12) управления двигателями, соответственно служат для генерирования половины x/2 числа x фаз, с которыми работают двигатели (14, 15), в частности два двигателя (14, 15).
3. Способ по п.1, в котором блоки (21, 22) управления двигателями соответственно служат для генерирования полного числа x фаз, с которыми двигатели (24, 25) работают, и в котором двигатели (24, 25) работают с пониженной мощностью еще функциональных блоков (21, 22) управления двигателями, если происходит частичный отказ блоков (21, 22) управления двигателями.
4. Способ по одному из пп.1, 2 или 3, в котором двигатели (14, 15) работают последовательно.
5. Способ по одному из пп.1, 2 или 3, в котором двигатели (14, 15) работают одновременно.
6. Способ по одному из пп.1,2 или 3, в котором двигатели (14, 15; 24, 25) приводят в действие привод посадочного щитка и основной опоры шасси воздушного судна.
7. Способ по п.6, в котором двигатели (14, 15; 24, 25) последовательно приводят в действие привод посадочного щитка и основной опоры шасси воздушного судна, и в котором энергию, генерируемую при помощи одного из двигателей, используют для приведения в действие других двигателей в случае дефицита энергии.
8. Способ по одному из пп.1, 2 или 3, в котором двигатели (14, 15; 24, 25) приводят в действие дуплексный привод посадочного щитка воздушного судна.
9. Способ по одному из пп.1, 2 или 3, в котором двигатели (14, 15; 24, 25) принадлежат к одному классу по мощности и имеют одинаковую выходную мощность, особенно когда они работают одновременно.
10. Способ по одному из пп.1, 2 или 3, в котором двигатели (14, 15; 24, 25) пространственно расположены близко друг к другу, особенно когда они работают одновременно.
11. Способ по одному из пп.1, 2 или 3, в котором все двигатели (14, 15; 24, 25) работают с питанием от еще функциональных блоков (11, 12; 21, 22, 25) управления двигателями, если часть блоков (11, 12; 21, 22) управления двигателями выходит из строя.
12. Способ по одному из пп.1, 2 или 3, в котором все двигатели (14, 15; 24, 25) работают с еще имеющейся остаточной мощностью блоков (11, 12; 21, 22) управления двигателями, если происходит частичный отказ блоков (11, 12; 21, 22) управления двигателями.
13. Устройство для электропитания с резервированием нескольких серводвигателей или приводных электродвигателей (14, 15; 24, 25) при помощи общего силового электронного блока (10; 20), в частности, на воздушном судне, причем силовой электронный блок (10, 20) содержит несколько электронных блоков (11, 12; 21, 22) управления двигателями и коммутационное устройство (13; 23) для избирательного соединения блоков (11, 12; 21, 22) управления двигателями с двигателями (14, 15; 24, 25), причем электродвигатели (14, 15; 24, 25) работают с номинальной мощностью, если электронные блоки (11, 12; 21, 22) управления двигателями являются полностью функциональными, при этом двигатели (14, 15; 24, 25) могут работать с имеющейся остаточной мощностью блоков (11, 12; 21, 22) управления двигателями при помощи коммутационного устройства (13; 23), если происходит частичный отказ блоков (11, 12, 21, 22) управления двигателями, при этом блоки (11, 12) управления двигателями служат для генерирования части x фаз, с которыми работают двигатели, двигатели (14, 15) могут работать с еще сохраненными фазами блоков (11, 12) управления двигателями при помощи коммутационного устройства (13), если происходит частичный отказ блоков (11, 12) управления двигателями.
14. Устройство по п.13, в котором блоки (11, 12) управления двигателями, в частности два блока (11, 12) управления двигателями, служат для генерирования половины x/2 числа x фаз, с которыми могут работать двигатели (14, 15), в частности два двигателя (14, 15).
15. Устройство по п.13 или 14, в котором блоки (21, 22) управления двигателями служат для генерирования полного числа х фаз, с которыми двигатели (24, 25) могут работать, и в котором двигатели (24, 25) могут работать с пониженной мощностью еще функциональных блоков (21, 22) управления двигателями при помощи коммутационного устройства (23), если происходит частичный отказ блоков (21, 22) управления двигателями.
16. Устройство по одному из пп.13, 14 или 15, в котором двигатели (14, 15) могут работать последовательно при помощи коммутационного устройства (13).
17. Устройство по одному из пп.13, 14 или 15, в котором двигатели (24, 25) могут работать одновременно при помощи коммутационного устройства (23).
18. Устройство по п.13, в котором двигатели (14, 15; 24, 25) приводят в действие привод посадочного щитка и основной опоры шасси воздушного судна.
19. Устройство по п.13 или 14, в котором двигатели (14, 15; 24, 25) последовательно приводят в действие привод посадочного щитка и основной опоры шасси воздушного судна, и в котором энергию, генерируемую при помощи одного из двигателей, используют для приведения в действие других двигателей в случае дефицита энергии.
20. Устройство по п.13 или 14, в котором двигатели (14, 15; 24, 25) приводят в действие дуплексный привод посадочного щитка воздушного судна.
21. Устройство по п.13 или 14, в котором двигатели (14, 15; 24, 25) принадлежат к одному классу по мощности и имеют одинаковую выходную мощность, особенно когда они работают одновременно.
22. Устройство по п.13 или 14, в котором двигатели (14, 15; 24, 25) пространственно расположены близко друг к другу, особенно когда они работают одновременно.
23. Устройство по п.13 или 14, в котором все двигатели (14, 15; 24, 25) могут работать с мощностью еще функциональных блоков (11, 12; 21, 22) управления двигателями при помощи коммутационного устройства (13; 23), если часть блоков (11, 12; 21, 22) управления двигателями выходит из строя.
24. Устройство по п.13 или 14, в котором все двигатели (14, 15; 24, 25) могут работать с еще имеющейся остаточной мощностью блоков (11, 12; 21, 22) управления двигателями при помощи коммутационного устройства (13; 23), если происходит частичный отказ блоков (11, 12; 21, 22) управления двигателями.
| Развертывающий преобразователь сопротивления в частоту импульсов | 1986 |
|
SU1310848A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ | 2004 |
|
RU2263045C1 |
| ВОЗДУШНОЕ СУДНО И СПОСОБ ЭКСПЛУАТАЦИИ ВОЗДУШНОГО СУДНА | 2000 |
|
RU2250181C2 |
| Устройство для программного управления положением вала электродвигателя | 1980 |
|
SU907512A1 |

