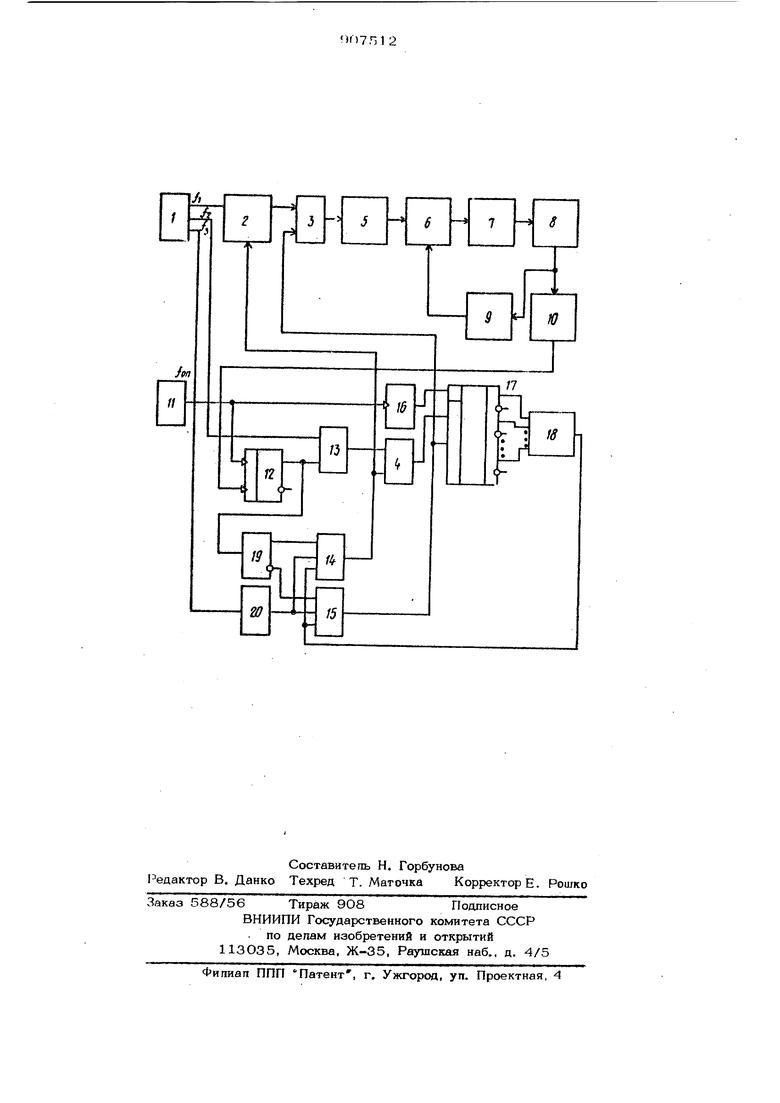
(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ Изобретение относится к нобпасти автоматического регулирования, а именно к системам стабитшзации скорости электродвигателей с дополнительным регулированием фазового положения вала и может найти различное применение в автоматике, в частности в устройствах, в которых необходимо обеспечить синхронное и синфазное вращение валов нескольких электродвигателей. Известно устройство для программного управления положением вала электродвигателя, содержащее фазовый дискриминатор, блок управления, электродвигатель, на валу которого установлены датчик скорости, датчик положения, фазовый дискриминатор, делитель частоты, элемент ИЛИ, триггер, генератор опорной частоты и генератор эталонных частот l. Недостатком такого устройства явтшется невозможность фазирования положения ваАа электродвигателя при низких скоростях или при низкой частоте опорных импульсов. Наиболее бпиэким техническим решением к изобретению $шляется устройство для программного управления положением вала электродвигателя, позволяющее с большой точностью фазировать попожение вала электродвигателя относительно опорных импульсов в широком диапазоне частот и скоростей. Устройство содержит последовательно соединенные фазовый дискриминатор, блок управления и электродвигатель, на валу которого установлены датчик скорости и датчик положения, выход датчика скорости соединен с одним из входов фазового дискриминатора, другой вход которого через делитель частоты подключен к выходу элемента ИЛИ, выход датчика положения подключен к первому входу триггера, второй вход которого соединён с выходом генератора опорной частоты и входом формирователя импульсов, а выход последнего подключен к обнуляющему входу реверсивного счетчика, первый вход первого элемента И и вход элемента за390держкя соединены со вторым и третьим Входами генератора эталонных частот, один из входов элемента ИЛИ соединен с вычитающим входом реверсивного счет чика, а его выходы подключены ко дам формироватегш управляющего сигна па 2. Недостатком данного устройства яв кается его невысокое быстродействие, обусловленное невозможностью фазирования положения вала электродвигателя в Й.ВУХ направлениях относительно опорных импупьсов в зависимости от знака фазового рассогласования (плюс меньше 180 минус - больше 180), - Цепь изобретения - уве1шчение быстрбдействия устройства. Поставленная цель достигается тем, что в устройство для программного управления положением вала электродвига теля, содержащее последовательно соединенные первый элемент ИЛИ, дегштел:ь частоты и дискриминатор, связанный вто™ рым входом с датчиком скорости вала электродвигателя, а выходом - с блоком управления, генератор эталонных частот, подключенный первым и вторым выхода ми соответственно ко входу элемента задержки и первому входу первого эпемен та И, соециненноговгорым входом с выхо дом триггера, связанного первым входом с выходом датчика положения вала элек«тродвигателя, а вторым входом - с выходом генератора опорной частоты и со входом формирователя импуш сов, подключенного выходом к первому входу реверсивного счетчика, соединенного выходами со входами первого формирователя управляющих сигналов, введены формирователь числа импульсов, второй элемент ИЛИ, второй и третий элементы И и второй формирователь управляющих снгаалов, соединенный входом с выходом триггера, а прямым и инверсьшгм выходами - с пер выми входами соответственно второго и третьего элементов И, подключенных вторыми входами к выходу элемента эадерж. ки, третьими входами к выходу первого формирователя управляющих сигналов, выход третьего элемента И связан с вы читающим входом реверсивного счетчика и с первым входом первого элемента ИЛИ, подключенного вторым входом к вы ходу формирователя числа импульсов, соединенного первым входом с третьим выходом генератора эталонных частот, а вторым входом с выходом второго элемента И и первым входом второго элеме 2.4 та ИЛИ, связанного вторым входом с выходом первого элемента И, а выходом с суммирующим входом реверсивного счет шка, На чертеже дана схема предлагаемого устройства. Устройство содержит генератор эта лон1л 1Х частот 1, формирователь 2 числи импульсов, первый 3 и второй 4 эпемен- ты ИЛИ, делитель 5 частоты, фазовый дискриминатор 6, блок 7 управления, элек тродвйгатель 8, датчик 9 скорости вала электродвигателя, датчик 10 положения вала элекгродвигагел}., генератор 11 опорной частоты, триггер 12, первый, второй и третий элементы И 13-15, формирова тель 16 импульсов, реверсивный счетчик 17, первый и второй формирователи 18 и .19 управляющего сигнала и элемент 20 задержки. Устройство работает следующим обра зом. Генератор 1 подает три стабильные синхронизированные последовате пьности коротких импупьсов ( f I f 2. з на первый вход дискриминатора 6 посту пают импульсы частоты(и,где И - коэффищ1ент деления делителя 5. На другой вход дискриминатора 6 поступают импуль- сы с датчика 9 скорости, который должен генерировать достаточно больщое импульсов за один оборот вала. Если частота импульсов х11И на первом дискриминатора 6 больще, чем на втором, то напряжение на его выходе макси- мальное, и скорость вращения вала электродвигателя 8 увеличивается. Если частота импульсов -|/И меньще частоты импупьсов с датчика 9, то напряжение на выходе дискриминатора 6 равно нулю, и скорость вращения вала уменьшается. В установивщемся режиме вал электродвигателя 8 вращается с такой скоростью, что частота импульсов с датчика 9 равна частоте Е /ИПри этом аналоговое напряжение на выходе дискриминатора 6 зависит от сдвига по фазе между сигналами, подаваемыми на его входьи Это напряжение через блок 7 так управляет электродвигателем 8, что фаза сигнала с датчика 9 скорости следит за фазой сигнала на входе дискриминатора 6. Такая работа соответствует вхождению вала электродвигателя 8 в синхронный режим, однако фазовое положение вала относительно фазы.частоты опорных импульсов оп может быть произвольным. Для изменения фазового попожения вала в устройстве используется метод дискрет ного изменения фазы, закшочающийся в добавпении импульсов в последовательность импульсов частоты f или удапе- НИИ импупьсов из этой последовательност В результате этого фаза импупьсов частоты f/I |и на входе дискриминатора 6 изменяется дискретно на Эбо|иград. в одном из двух направлений в зависимост от знака рассогласования. Дискретность изменения фазы и частоты добавления f,, (фазирования) выбираются такими, чтобы устройство не выходило из синхронизации по скорости и определяются экспериментально. Частота добавления или удаления определяет время фазирования и зависит, в основном, от быстродействия электродвигателя. Фор мирователь 19 управляющего сигнала оп ределяет знак фазового рассогласования между импульсами генератора 11 опорной частоты и импульсами датчика 10 положения. Если знак фазового рассогла- сования плюс, что соответствует сдвигу фаз меньше 18О град, или коэффициенту заполнения импульсов на выходе триггера 12 меньше 0,5, на инверсном выходе управляющего устройства 19 присутствуе логическая 1, В этом случае открыт элемент И 15, а элемент И 14 закрыт. Если знак фазового рассогласования минус, что соответствует сдвигу фаз больше 18О град, или коэффициенту заполнения импульсов на выходе триггера 12 больше 0,5) на прямом выходе управляющего устройства 19 присутствует логиче кая I, и теперь уже открыт элемент И 14, а элемент И 15 закрыт. Датчик 10 положения выдает один импульс за один оборот вала. Импульсы с этого датчика поступают на один из входов тригге ра 12, на другой вход которого поступают импульсы с генератора 11. По перед нему фронту импульса опорной частоты триггер 12 устанавливается в единичное состояние, а формирователь 16 формирует короткий импульс, устанавливающий реверсивный счетчик 17 в нулевое состояние. При этом элемент И 13 открь вается, и импульсы частоты заполнения 12. через элемент ИЛИ 4 поступают на суммирующий вход счетчика 17. Частота заполнения выбирается такой, чтобы при максимальном фазовом рассогласовании в счетчик могло быть заполнено число N- У1, где Ы- число импульсов с датчика 10 за один оборот вала. При этом коэффициент пересчета счетчика 17 выбирает ся равным. Пусть знак фазового рассопласования плюс, тогда формирователь 2 гасла импульсов пропускает на свой выход всю последовательность импупьсов частоты , так как отсутствуют импупьсы на выходе закрытого элемента И 14, Одновременно с суммированием импульсов частоты 2 происходит считывание информации со счетчика 17 импульсами частоты Е поступающими на его вычитающий вход через открытый элемент И 15, Эти же импульсы поступают на второй вход элемента ИЛИ 3, изменяя фазовое положение вала электродвигателя 8. Через время, равное фазовому рассогласованию, на другой вход триггера 12 поступает импульс с датчика 10 и по его переднему фронту триггер 12 устанавливается в нулевое состояние. В результате элемент И 13 закрывается, иимпульсы частоты на суммирующий вход счетчика 17 не поступают, а считывание информации по его вычитающему входу продолжается. При каждом появлении опорного импульса происходит уточнение записанной информации в счетчике 17 о фазовЬм рассогласовании. Добавление импульсов, а значит и изменение фазового положения вала, происходит до тех пор, пока число в счетчике 17 не станет меньще У, после чего на выходе первого формирователя 18 устанавливается логический О. При этом элемент И 15 закрывается, запрещая прохождение импульсов частоты f на добавление, и фазирование положения вала относительно опорных импупьсов заканчивается. Если знак фазового рассогласования минус, работа устройства отличается тем, что одновременно с суммированием импульсов частоты { происходит считывание информации со счетчика 17 импульсами частоты f,, поступающими на его суммирующий вход через открытый второй элемент И 14 и второй элемент ИЛИ 4. Эти импульсы поступают на второй вход формирователя 2 числа имщльсов, изменяя фазовое положение вала электродвигателя 8 в другом направлении. После полного заполнения счетчика последующий импульс частоты 2, сбрасывает его в нулевое состояние, при этом срабатывает первый формирователь 18 правляющего сигнала, и появившийся логический О на его выходе закроет элеент И 14. При этом происходит запреение прохождения импульсов частоты а управляющий вход формирователя 2 чиспа импупьсов, суммируюгций вход счетчика 17, и фазирование поЛожен я вала заканчивается. Эпемент 20 задержки необходимо для того, чтобы импульсные по спедоватепьности частоты i и ij на вы ходе счетчика 17 и частот f и f на входах элемента ИЛИ 3 не перекрывались во времени. Требуемую скорость враще кия вала эпектродвигатеяя 8 устанав1шва ют пропорциональным изменением фиксированных частот -i/jH 2 генератора 1. Предлагаемое устройство позволяет уменьшить время фазирования положения вала электродвигателя, т.е. увеличить быстродействие устройства в два раза. В :лучае /нарушения сфазированного состояния под действием помех, требуется меньше времени для его восстановления. Формула изобретения Устройство для программного управпения положением вапа эпектродвигатепя, содержащее последовательно соединенные первый элемент ИЛИ, делитель частоты и дискриминатор, связанный вторым входом с датчиком скорости вала электродвн гателя, а выходом - с блоком управпения, генератор эталонных частот, под кпюченный первым и вторым выходами соответственно ко входу элемента задерж ки и первому входу первого элемента И, соединенного вторым входом с выходом триггера, связанного nepBbnvf входом с выходом датчика положения вала эпектро двигателя, а вторым входом - с выходом генератора опорной частоты и со входом формирователя импульсов, подключенного выходом к первому входу реверсивного счетчика, соединенного выходами со входами первого рмирователя управляющих сигналов, отличающееся тем, что, с цепью повьпления быстродействия устройства, в него вввдefш формирова™ тень числа импупьсов, второй элемент ИЛИ, второй и третий элементы И и втО рой формирователь управляющих сигналов, соединенный входом с выходом триг гера, а-прямым и инверсным выходами . с первыми входами соответственно второго и третьего элементов И, подключенных вторыми входами к выходу элемента задержки, третьикте входами - к выходу первого формирователя управляющих сигналов, выход третьего элемента И связан с вычитающим входом реверсивного счетчика и с первым входом первого эле мента ИЛИ, подключеннбго вторым входом к выходу формирователя числа импуяьсов, соединенного первым входом с третьим выходом генератора эталонных частот, а вторым входом - с выходом вто рого элемента И и первым входом второго элемента ИЛИ, связанного вторым входом с выходом первого элемента И, а выходом - с суммирующим входом реверс сивного счетчика Источники информации, принятые во внимание при экспертизе 1.Сб. Система стабилизапии скорости с фазовым управлением и система фааарования прецизионного электропривода. Л.. ДДНТП, 1971 2.Авторское свидетельство СССР № 708310, кл. G 05 В 19/4О, 1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления положением вала электродвигателя | 1977 |
|
SU708310A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Устройство для импульсного регулиро-ВАНия фАзОВОгО пОлОжЕНия POTOPA СиН-ХРОННОгО элЕКТРОдВигАТЕля | 1979 |
|
SU817960A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| Устройство для регулирования скорости движения магнитного носителя | 1979 |
|
SU932558A1 |
| Устройство синхронизации в одночастотных многоканальных адресных системах с временным разделением каналов | 1989 |
|
SU1811018A1 |
| Устройство фазовой автоподстройки тактовой частоты | 1989 |
|
SU1721834A1 |
| Система цикловой синхронизации для многоканальных систем связи | 1988 |
|
SU1598193A1 |
| Устройство для регенерации многоканальной синфазной дискретной информации | 1980 |
|
SU926774A1 |