Область техники, к которой относится изобретение
Данное изобретение, в целом, имеет отношение к передаче данных, и более конкретно, к методам выполнения оценки канала и пространственной обработки в системах дуплексной связи с временным разделением (TDD) со множеством входов и множеством выходов (MIMO).
Уровень техники
MIMO система использует множество (NT) антенн передачи, и множество (NR) антенн приема для передачи данных. MIMO канал, сформированный посредством передающих NT и приемных NR антенн, может быть разложен в независимые каналы NS с . Каждый из независимых каналов NS также называется пространственным подканалом или собственной модой MIMO канала и соответствует размерности. MIMO система может обеспечить улучшенные характеристики (например, увеличенную пропускную способность) если используются дополнительные размерности, созданные множеством передающих и приемных антенн.
. Каждый из независимых каналов NS также называется пространственным подканалом или собственной модой MIMO канала и соответствует размерности. MIMO система может обеспечить улучшенные характеристики (например, увеличенную пропускную способность) если используются дополнительные размерности, созданные множеством передающих и приемных антенн.
Чтобы передать данные на одной или нескольких NS собственных модах канала MIMO, необходимо выполнить пространственную обработку в приемнике и обычно также в передатчике. Потоки данных, переданные от NТ передающих антенн, скрещиваются друг с другом в приемных антеннах. Пространственная обработка пытается разделить потоки данных в приемнике так, чтобы они могли быть возвращены по отдельности.
Чтобы выполнить пространственную обработку требуется точная оценка ответа канала между передатчиком и приемником. Для TDD системы нисходящая линия связи (т.е. прямая линия связи) и восходящая линия связи (т.е. обратная линия связи) между точкой доступа и терминалом пользователя разделяют ту же самую частотную полосу. В этом случае, ответы канала нисходящей линии связи и канала восходящей линии связи могут быть приняты так, чтобы быть взаимными друг с другом, после того, как калибровка была выполнена (как описано ниже) для составления различий в цепях приема и передачи в точке доступа и терминале пользователя. Таким образом, если H представляет матрицу ответа канала от антенной решетки А к антенной решетке B, то взаимный канал подразумевает, что связь от антенной решетки В к антенной решетке А предоставляется посредством  , где
, где  обозначает перемещение М.
обозначает перемещение М.
Оценка канала и пространственная обработка для MIMO системы обычно потребляют большую часть ресурсов системы. Поэтому существует потребность в области техники для методов, чтобы эффективно выполнить оценку канала и пространственную обработку в TDD MIMO системе.
Сущность изобретения
Методы, предусмотренные здесь, служат для выполнения оценки канала и пространственной обработки эффективным способом в TDD MIMO системе. Для TDD MIMO системы взаимные характеристики канала могут быть использованы для того, чтобы упростить оценку канала и пространственную обработку и в передатчике и в приемнике. Первоначально точка доступа и терминал пользователя в системе могут выполнить калибровку для того, чтобы определить различия в ответах их цепей приема и передачи, и получить поправочные коэффициенты, используемые для учета различий. Калибровка может быть выполнена для гарантии того, что "калиброванный" канал, с примененными поправочными коэффициентами, является взаимным. Таким образом, более точная оценка второй линии связи может быть получена на основании оценки, полученной для первой линии связи.
В течение обычной работы, пилот-сигнал (контрольный сигнал) MIMO, передается (например, точкой доступа) на первой линии связи (т.е. нисходящей линии связи), и используется для того, чтобы получить оценку ответа канала для первой линии связи. Оценка ответа канала затем может быть разложена (например, терминалом пользователя, используя сингулярную декомпозицию) для того, чтобы получить диагональную матрицу сингулярных значений и первую унитарную матрицу, содержащую и левые собственные векторы первой линии связи, и правые собственные векторы второй линии связи (например, восходящей линии связи). Первая унитарная матрица может быть использована таким образом, чтобы выполнить пространственную обработку для передачи данных, принятой на первой линии связи так же, как для передачи данных, которая была послана на второй линии связи.
Регулируемый опорный сигнал (регулируемая ссылка) может быть передан на второй линии связи с использованием собственных векторов в первой унитарной матрице. Регулируемый опорный сигнал (или регулируемый пилот-сигнал) представляет собой пилот-сигнал, переданный на определенных собственных модах, с использованием собственных векторов, используемых для передачи данных. Этот регулируемый опорный сигнал затем может быть обработан (например, точкой доступа) для того, чтобы получить диагональную матрицу и вторую унитарную матрицу, содержащую и левые собственные векторы второй линии связи, и правые собственные векторы первой линии связи. Вторая унитарная матрица может быть использована таким образом, чтобы выполнить пространственную обработку для передачи данных, принятой на второй линии связи так же, как для передачи данных, которая была послана на первой линии связи.
Различные аспекты и варианты осуществления изобретения подробно описаны ниже.
Краткое описание чертежей
Различные аспекты и особенности данного изобретения описаны ниже в связи со следующими чертежами, в которых:
Фиг.1 представляет собой блок-схему точки доступа и терминала пользователя в TDD MIMO системе, в соответствии с одним вариантом осуществления изобретения;
Фиг.2A изображает блок-схему цепей приема и передачи в точке доступа и терминале пользователя, в соответствии с одним вариантом осуществления изобретения;
Фиг.2B изображает использование матриц коррекции для составления различий в цепях приема/передачи в точке доступа и терминале пользователя, в соответствии с одним вариантом осуществления изобретения;
Фиг.3 изображает пространственную обработку для нисходящей линии связи и восходящей линии связи для способа пространственного мультиплексирования, в соответствии с одним вариантом осуществления изобретения;
Фиг.4 изображает пространственную обработку для нисходящей линии связи и восходящей линии связи для способа регулирования луча, в соответствии с одним вариантом осуществления изобретения; и
Фиг.5 изображает процесс для выполнения оценки канала и пространственной обработки в точке доступа и терминале пользователя, в соответствии с одним вариантом осуществления изобретения.
Подробное описание изобретения
Фиг.1 представляет собой блок-схему варианта осуществления точки доступа 110 и терминала пользователя 150 в TDD MIMO системе 100. Точка доступа 110 оснащена антеннами приема/передачи Nap для приема/передачи данных, и терминал пользователя 150 оснащен антеннами приема/передачи Nut.
На нисходящей линии связи, в точке доступа 110, процессор передачи (TX) данных 114 принимает поток данных (т.е. информационные биты) от источника данных 112 и передачи сигналов и других данных от контроллера 130. ТХ процессор данных 114 форматирует, кодирует, чередует и модулирует (т.е. карты символа) данные для того, чтобы обеспечить символы модуляции. Пространственный ТХ процессор 120 принимает символы модуляции от ТХ процессора данных 114 и выполняет пространственную обработку для того, чтобы обеспечить потоки символов передачи Nap, по одному потоку для каждой антенны. Пространственный ТХ процессор 120 также мультиплексирует в символы контрольного сигнала как соответствующие (например, для калибровки и нормальной операции).
Каждый модулятор (MOD) 122 (который включает в себя цепь передачи) принимает и обрабатывает соответствующий поток передачи символа для того, чтобы обеспечить соответствующий модулированный сигнал нисходящей линии связи. Модулированные сигналы нисходящей линии связи Nap от модуляторов 122a через 122ap затем передаются от антенн Nap 124a-124ap, соответственно.
В терминале пользователя 150 антенны Nut 152a-152ut принимают переданные модулированные сигналы нисходящей линии связи, и каждая антенна обеспечивает принятый сигнал к соответствующему демодулятору (DEMOD) 154. Каждый демодулятор 154 (который включает в себя цепь приема) выполняет обработку, в дополнение к выполненной в модуляторе 122, и обеспечивает принятые символы. Пространственный процессор приема (RX) 160 затем выполняет пространственную обработку принятых символов от всех демодуляторов 154a-154ut для того, чтобы обеспечить возвращенные символы, которые являются оценками символов модуляции, посланных точкой доступа. RX процессор данных 170 дополнительно обрабатывает (например, символ demaps, deinterleaves, и расшифровки) возвращенные символы для того, чтобы обеспечить декодированные данные. Декодированные данные могут включать в себя возвращенный поток данных, передачу сигналов, и так далее, которые могут быть предоставлены приемнику данных 172 для хранения и/или контроллеру 180 для дополнительной обработки.
Обработка для восходящей линии связи может быть той же самой или отличной от обработки для нисходящей линии связи. Данные и передача сигналов обрабатываются (например, кодируются, чередуются, и модулируются) ТХ процессором данных 188 и дополнительно пространственно обрабатываются ТХ пространственным процессором 190, который также мультиплексирует в символы контрольного сигнала как соответствующие (например, для калибровки и нормальной работы). Контрольный сигнал и передача символов от ТХ пространственного процессора 190, дополнительно обрабатываются модуляторами 154a-154ut для того, чтобы сгенерировать модулированные сигналы Nut восходящей линии связи, которые затем передаются через антенны 152a-152ut к точке доступа.
В точке доступа 110 модулированные сигналы восходящей линии связи принимаются антеннами 124a-124ap, демодулируются демодуляторами 122a-122ap, и обрабатываются пространственным RX процессором 140 и RX процессором данных 142 в дополнительном способе к выполненному в терминале пользователя. Декодированные данные для восходящей линии связи могут быть обеспечены приемнику данных 144 для хранения и/или контроллеру 130 для дополнительной обработки.
Контроллеры 130 и 180 управляют работой различных блоков обработки данных в точке доступа и терминале пользователя соответственно. Блоки памяти 132 и 182 хранят данные и программные коды, используемые контроллерами 130 и 180 соответственно.
1. Калибровка
Для TDD системы, поскольку нисходящая линия связи и восходящая линия связи совместно используют ту же самую частотную полосу, обычно возникает высокая степень корреляции между ответами канала нисходящей линии связи и канала восходящей линии связи. Таким образом, матрицы ответа канала нисходящей линии связи и канала восходящей линии связи предположительно могут быть взаимными (т.е. транспонироваться) друг из друга. Однако ответы цепей приема/передачи в точке доступа типично не равны ответам цепей приема/передачи в терминале пользователя. Для улучшенной характеристики, различия могут быть определены и учтены посредством калибровки.
Фиг.2A изображает блок-схему цепей приема и передачи в точке доступа 110 и терминале пользователя 150, в соответствии с одним вариантом осуществления изобретения. Для нисходящей линии связи в точке доступа 110 символы (обозначенные вектором "передача"  ) обрабатываются цепью передачи 214 и передаются от антенн Nap 124 по каналу MIMO. В терминале пользователя 150 сигналы нисходящей линии связи принимаются антеннамиNul 152 и обрабатываются цепью приема 254 для того, чтобы обеспечить принятые символы (обозначенные вектором "прием"
) обрабатываются цепью передачи 214 и передаются от антенн Nap 124 по каналу MIMO. В терминале пользователя 150 сигналы нисходящей линии связи принимаются антеннамиNul 152 и обрабатываются цепью приема 254 для того, чтобы обеспечить принятые символы (обозначенные вектором "прием"  ). Для восходящей линии связи в терминале пользователя 150 символы (обозначенные вектором передачи
). Для восходящей линии связи в терминале пользователя 150 символы (обозначенные вектором передачи  ) обрабатываются цепью передачи 264 и передаются от антенн Nut 152 по каналу MIMO. В точке доступа 110, сигналы восходящей линии связи принимаются антеннами Nap 124 и обрабатываются цепью приема 224 для того, чтобы обеспечить принятые символы (обозначенные вектором приема
) обрабатываются цепью передачи 264 и передаются от антенн Nut 152 по каналу MIMO. В точке доступа 110, сигналы восходящей линии связи принимаются антеннами Nap 124 и обрабатываются цепью приема 224 для того, чтобы обеспечить принятые символы (обозначенные вектором приема  ).
).
Для нисходящей линии связи вектор приема в терминале пользователя (в отсутствии помех) может быть выражен как:
 , Уравнение 1,
, Уравнение 1,
где представляет собой вектор передачи с Nар элементами для нисходящей линии связи;
представляет собой вектор приема с Nutэлементами;
 представляет собой диагональную матрицу Nар × Nар с элементами для комплексных коэффициентов передачи, связанных с цепью передачи для антенн Nap в точке доступа;
представляет собой диагональную матрицу Nар × Nар с элементами для комплексных коэффициентов передачи, связанных с цепью передачи для антенн Nap в точке доступа;
 представляет собой диагональную матрицу Nut × Nut с элементами для комплексных коэффициентов передачи, связанных с цепью приема для антеннNut в терминале пользователя; и
представляет собой диагональную матрицу Nut × Nut с элементами для комплексных коэффициентов передачи, связанных с цепью приема для антеннNut в терминале пользователя; и
H представляет собой матрицу ответа канала Nut× Napдля нисходящей линии связи.
Ответы цепей приема/передачи и канала MIMO обычно представляют собой функцию частоты. Для простоты, канал амплитудного замирания (т.е. с плоской частотной характеристикой) допускается для последующего дифференцирования.
Для восходящей линии связи вектор приема в точке доступа (в отсутствии помех) может быть выражен как:
 , Уравнение 2,
, Уравнение 2,
где представляет собой вектор передачи с Nut элементами для восходящей линии связи;
представляет собой вектор приема с Nар элементами;
 представляет собой диагональную матрицу Nut × Nut с элементами для комплексных коэффициентов передачи, связанных с цепью передачи для антенн Nut в терминале пользователя;
представляет собой диагональную матрицу Nut × Nut с элементами для комплексных коэффициентов передачи, связанных с цепью передачи для антенн Nut в терминале пользователя;
 представляет собой диагональную матрицу Nар × Nар с элементами для комплексных коэффициентов передачи, связанных с цепью приема для Nар антенн в точке доступа; и
представляет собой диагональную матрицу Nар × Nар с элементами для комплексных коэффициентов передачи, связанных с цепью приема для Nар антенн в точке доступа; и
представляет собойматрицуответа канала Nар× Nut для восходящей линии связи.
Из уравнений (1) и (2), "эффективные" ответы канала нисходящей линии связи и канала восходящей линии связи  и
и  , которые включают в себя ответы применяемых цепей приема и передачи, могут быть выражены как:
, которые включают в себя ответы применяемых цепей приема и передачи, могут быть выражены как:
 и
и  Уравнение 3
Уравнение 3
Как показано в уравнении (3), если ответы цепей приема/передачи в точке доступа не равны ответам цепей приема/передачи в терминале пользователя, то эффективные ответы канала нисходящей линии связи и канала восходящей линии связи не взаимны друг другу, т.е. 
Объединяя эти два уравнения в наборе уравнения (3), могут быть получены следующие отношения:
 Уравнение 4
Уравнение 4
Перестраивая уравнение (4) получено следующее:

или
 Уравнение 5
Уравнение 5
где  и
и  . Так как
. Так как  ,
,  ,
,  , и
, и  являются диагональными матрицами,
являются диагональными матрицами,  и
и  также являются диагональными матрицами. Также уравнение (5) может быть выражено как:
также являются диагональными матрицами. Также уравнение (5) может быть выражено как:
 Уравнение 6
Уравнение 6
Матрицы  и
и  могут быть рассмотрены как, включающие в себя "поправочные коэффициенты", которые могут составлять различия в цепях приема/передачи в точке доступа и терминале пользователя. Тогда это позволило бы ответу канала для одной линии связи быть выраженным ответом канала для другой линии связи, как показано в уравнении (5).
могут быть рассмотрены как, включающие в себя "поправочные коэффициенты", которые могут составлять различия в цепях приема/передачи в точке доступа и терминале пользователя. Тогда это позволило бы ответу канала для одной линии связи быть выраженным ответом канала для другой линии связи, как показано в уравнении (5).
Калибровка может быть выполнена для того, чтобы определить матрицы и . Как правило, истинный ответ канала H и ответы цепи приема/передачи не известны, и не могут быть точно или легко установлены. Вместо этого эффективные ответы канала нисходящей линии связи и канала восходящей линии связи  и могут быть оценены основываясь на контрольных сигналах MIMO, посланных по нисходящей линии связи и на восходящей линии связи соответственно. Генерация и использование контрольного сигнала MIMO подробно описаны вышеупомянутой США заявке на патент № 60/421,309.
и могут быть оценены основываясь на контрольных сигналах MIMO, посланных по нисходящей линии связи и на восходящей линии связи соответственно. Генерация и использование контрольного сигнала MIMO подробно описаны вышеупомянутой США заявке на патент № 60/421,309.
Оценки матриц и , которые упоминаются как матрицы коррекции  и
и  , могут быть получены на основании оценок ответа канала нисходящей линии связи и канала восходящей линии связи
, могут быть получены на основании оценок ответа канала нисходящей линии связи и канала восходящей линии связи  и
и  в различных способах, включая вычисление матричного отношения и минимальной среднеквадратической ошибки (MMSE). Для вычисления матричного отношения, матрица
в различных способах, включая вычисление матричного отношения и минимальной среднеквадратической ошибки (MMSE). Для вычисления матричного отношения, матрица  С сначала вычисляется как отношение оценок ответов канала нисходящей линии связи и канала восходящей линии связи следующим образом:
С сначала вычисляется как отношение оценок ответов канала нисходящей линии связи и канала восходящей линии связи следующим образом:
 Уравнение 7,
Уравнение 7,
где отношение взято поэлементно. Таким образом, каждый элемент из С может быть вычислен как:
 , для
, для  и
и  ,
,
где  и
и  является (i,j)-м (ряд, колонка) элементом из
является (i,j)-м (ряд, колонка) элементом из  и
и  соответственно, и
соответственно, и  представляет собой (i,j)-й элемент из С.
представляет собой (i,j)-й элемент из С.
Вектор коррекции  для точки доступа, который включает в себя только диагональные элементы
для точки доступа, который включает в себя только диагональные элементы  из
из  , может быть определен так, чтобы быть равным значению нормализованных рядов С. Каждый ряд С,
, может быть определен так, чтобы быть равным значению нормализованных рядов С. Каждый ряд С,  , сначала нормализован посредством разделения каждого элемента ряда с первым элементом ряда для того, чтобы получить соответствующий нормализованный ряд
, сначала нормализован посредством разделения каждого элемента ряда с первым элементом ряда для того, чтобы получить соответствующий нормализованный ряд  . Таким образом, если
. Таким образом, если  представляет собой i-й ряд из C, то нормализованный ряд , может быть выражен как:
представляет собой i-й ряд из C, то нормализованный ряд , может быть выражен как:
 .
.
Вектор коррекции  затем приравнивается к средним из
затем приравнивается к средним из  нормализованных рядов С и может быть выражен как:
нормализованных рядов С и может быть выражен как:
 Уравнение 8
Уравнение 8
Вследствие нормализации, первый элемент из является единством.
Вектор коррекции  для терминала пользователя,
для терминала пользователя,  , который включает в себя только диагональные элементы из
, который включает в себя только диагональные элементы из  , может быть определен так, чтобы быть равным средней из инверсий нормализованных колонок С. Каждая колонка из С,
, может быть определен так, чтобы быть равным средней из инверсий нормализованных колонок С. Каждая колонка из С,  , сначала нормализована посредством измерения каждого элемента в колонке с j-м элементом вектора
, сначала нормализована посредством измерения каждого элемента в колонке с j-м элементом вектора  , который обозначен как
, который обозначен как  для того, чтобы получить соответствующую нормализованную колонку
для того, чтобы получить соответствующую нормализованную колонку  . Таким образом, если
. Таким образом, если  является j-й колонкой из C, тогда нормализованная колонка
является j-й колонкой из C, тогда нормализованная колонка  может быть выражена как:
может быть выражена как:

Вектор коррекции  затем устанавливается равным средней из инверсий из
затем устанавливается равным средней из инверсий из  нормализованных колонок из С и может быть выражен как:
нормализованных колонок из С и может быть выражен как:
 Уравнение 9
Уравнение 9
где инверсия нормализованных колонок  выполнена поэлементно.
выполнена поэлементно.
Калибровка обеспечивает векторы коррекции и  или соответствующие матрицы коррекции и
или соответствующие матрицы коррекции и  для точки доступа и терминала пользователя соответственно.
для точки доступа и терминала пользователя соответственно.
Вычисление MMSE для матриц коррекции и подробно описано в вышеупомянутой США заявке на патент № 60/421,462.
Фиг.2B иллюстрирует применение матриц коррекции для подсчета различий в цепях приема/передачи в точке доступа и терминале пользователя, в соответствии с одним вариантом осуществления изобретения. На нисходящей линии связи вектор передачи сначала умножается с матрицей посредством блока 212. Последующая обработка цепью передачи 214 и цепью приема 254 для нисходящей линии связи является аналогичной показанной на Фиг.2А. Точно так же на восходящей линии связи вектор передачи сначала умножается с матрицей посредством блока 262. К тому же последующая обработка цепью передачи 264 и цепью приема 224 для восходящей линии связи является аналогичной показанной на Фиг.2А.
"Калиброванные" ответы канала нисходящей линии связи и канала восходящей линии связи, наблюдаемые терминалом пользователя и точкой доступа соответственно, могут быть выражены как:
 и
и , Уравнение 10
, Уравнение 10
где  и
и  представляют собой оценки "истинных" выражений ответа калиброванного канала в уравнении (6). Из уравнений (6) и (10) может быть выявлено, что
представляют собой оценки "истинных" выражений ответа калиброванного канала в уравнении (6). Из уравнений (6) и (10) может быть выявлено, что  . Точность отношений
. Точность отношений  зависит от точности оценок и , которые в свою очередь зависят от качества оценок ответа канала нисходящей линии связи и канала восходящей линии связи и
зависит от точности оценок и , которые в свою очередь зависят от качества оценок ответа канала нисходящей линии связи и канала восходящей линии связи и  . Как показано выше, как только цепи приема/передачи были калиброваны, оценка ответа калиброванного канала полученная для одной линии связи (например,
. Как показано выше, как только цепи приема/передачи были калиброваны, оценка ответа калиброванного канала полученная для одной линии связи (например, ), может быть использована как оценка ответа калиброванного канала для другой линии связи (например,
), может быть использована как оценка ответа калиброванного канала для другой линии связи (например,  ).
).
Калибровка для TDD MIMO системы подробно описана в вышеупомянутой США заявке на патент № 60/421,309, и США заявке на патент № 60/421,462.
2. Пространственная Обработка
Для MIMO системы данные могут быть переданы на одной или нескольких собственных модах MIMO канала. Способ пространственного мультиплексирования может быть определен для того, чтобы покрыть передачу данных на многих собственных модах, и способ регулирования луча может быть определен для того, чтобы покрыть передачу данных на единственной собственной моде. Оба рабочих способа требуют пространственной обработки в передатчике и приемнике.
Оценка канала и методы пространственной обработки, описанные здесь, могут быть использованы для MIMO систем с или без OFDM. OFDM эффективно делит полную полосу пропускания системы на множество ортогональных подполос (поддиапазонов) ( ), которые также называются элементами разрешения по частоте или подканалами. С OFDM, каждая(ый) подполоса (поддиапазон) связана с соответствующей поднесущей, на которой могут быть модулированы данные. Для MIMO системы, использующей OFDM (т.е. MIMO-OFDM система), каждая собственная мода каждой подполосы может быть рассмотрена как независимый канал передачи. Для ясности, оценка канала и пространственные методы обработки описаны ниже для TDD MIMO-OFDM системы. Для этой системы, каждая подполоса беспроводного канала может быть предположена так, чтобы быть взаимной.
), которые также называются элементами разрешения по частоте или подканалами. С OFDM, каждая(ый) подполоса (поддиапазон) связана с соответствующей поднесущей, на которой могут быть модулированы данные. Для MIMO системы, использующей OFDM (т.е. MIMO-OFDM система), каждая собственная мода каждой подполосы может быть рассмотрена как независимый канал передачи. Для ясности, оценка канала и пространственные методы обработки описаны ниже для TDD MIMO-OFDM системы. Для этой системы, каждая подполоса беспроводного канала может быть предположена так, чтобы быть взаимной.
Корреляция между ответами канала нисходящей линии связи и канала восходящей линии связи может быть использована для того, чтобы упростить оценку канала и пространственную обработку в точке доступа и терминале пользователя для TDD системы. Это упрощение эффективно после того, как калибровка была выполнена, с целью составить различия в цепях приема/передачи. Ответы калиброванного канала могут быть выражены как функция частоты, следующим образом:
 , для
, для  ,
,
и  , для , Уравнение 11
, для , Уравнение 11
где К представляет ряд всех подполос, которые могут быть использованы для передачи данных (т.е. "подполосы данных"). Калибровка может быть выполнена так, чтобы матрицы  и были получены для каждой из подполос данных. Альтернативно, калибровка может быть выполнена только для подмножества всех подполос данных, когда матрицы
и были получены для каждой из подполос данных. Альтернативно, калибровка может быть выполнена только для подмножества всех подполос данных, когда матрицы и для "некалиброванных" подполос могут быть получены, интерполируя матрицы для "калиброванных" подполос, как описано в вышеупомянутой США заявке на патент № 60/421,462.
и для "некалиброванных" подполос могут быть получены, интерполируя матрицы для "калиброванных" подполос, как описано в вышеупомянутой США заявке на патент № 60/421,462.
Матрица ответа канала  для каждой подполосы может быть "диагонализуемой " для того, чтобы получить Ns собственных мод для той подполосы. Это может быть достигнуто либо посредством выполнения сингулярной декомпозиции на матрице ответа канала
для каждой подполосы может быть "диагонализуемой " для того, чтобы получить Ns собственных мод для той подполосы. Это может быть достигнуто либо посредством выполнения сингулярной декомпозиции на матрице ответа канала  либо посредством разложения собственного значения на матрице корреляции из , являющейся
либо посредством разложения собственного значения на матрице корреляции из , являющейся  . Для ясности, сингулярная декомпозиция используется для следующего описания.
. Для ясности, сингулярная декомпозиция используется для следующего описания.
Сингулярная декомпозиция матрицы калиброванного ответа канала восходящей линии связи  может быть выражена как:
может быть выражена как:
 , для
, для Уравнение(12)
Уравнение(12)
где  представляет собой унитарную матрицу (Nap × Nap) левых собственных векторов из
представляет собой унитарную матрицу (Nap × Nap) левых собственных векторов из  ;
;
 представляет собой диагональную матрицу (Nap × Nut) сингулярных значений из и;
представляет собой диагональную матрицу (Nap × Nut) сингулярных значений из и;
 представляет собой унитарную матрицу (Nut × Nut) правых собственных векторов из .
представляет собой унитарную матрицу (Nut × Nut) правых собственных векторов из .
Унитарная матрица характеризована собственностью  ,где
,где  представляет собой матрицу идентичности.
представляет собой матрицу идентичности.
Соответственно, сингулярная декомпозиция матрицы калиброванного ответа нисходящей линии связи  может быть выражена как:
может быть выражена как:
 , для , Уравнение (13)
, для , Уравнение (13)
где матрицы  и
и  являются унитарными матрицами левых и правых собственных векторов соответственно из . Как показано в уравнениях (12) и (13) и основано на вышеупомянутом описании, матрицы левых и правых собственных векторов для одной линии связи являются комплексом, сопряженным из матриц правых и левых собственных векторов, соответственно, для другой линии связи. Матрицы
являются унитарными матрицами левых и правых собственных векторов соответственно из . Как показано в уравнениях (12) и (13) и основано на вышеупомянутом описании, матрицы левых и правых собственных векторов для одной линии связи являются комплексом, сопряженным из матриц правых и левых собственных векторов, соответственно, для другой линии связи. Матрицы  ,
,  ,
,  и
и  являются различными формами матрицы , и матрицы , ,
являются различными формами матрицы , и матрицы , ,  и
и  - также являются различными формами матрицы
- также являются различными формами матрицы  . Для простоты, ссылка на матрицы
. Для простоты, ссылка на матрицы  и в следующем описании может также может быть сделана к их различным другим формам. Матрицы и используются точкой доступа и терминалом пользователя соответственно, для пространственной обработки и обозначены также их подписями. Собственные векторы также часто называются "регулируемыми" векторами.
и в следующем описании может также может быть сделана к их различным другим формам. Матрицы и используются точкой доступа и терминалом пользователя соответственно, для пространственной обработки и обозначены также их подписями. Собственные векторы также часто называются "регулируемыми" векторами.
Сингулярная декомпозиция детально описана Гильбертом Странгом в книге, под названием «"Linear Algebra and Its Applications," Second Edition, Academic Press, 1980».
Терминал пользователя может оценить калиброванный ответ канала нисходящей линии связи, основанный на контрольном сигнале MIMO, переданный точкой доступа. Тогда терминал пользователя может выполнить сингулярную декомпозицию для оценки калиброванного ответа канала нисходящей линии связи  , для
, для , для того, чтобы получить диагональную матрицу
, для того, чтобы получить диагональную матрицу  и матрицу левых собственных векторов из
и матрицу левых собственных векторов из  . Эта сингулярная декомпозиция может быть представлена как
. Эта сингулярная декомпозиция может быть представлена как  , где шапка
, где шапка  над каждой матрицей указывает то, что это оценка фактической матрицы.
над каждой матрицей указывает то, что это оценка фактической матрицы.
Точно так же точка доступа может оценить калиброванный ответ канала восходящей линии связи, основанный на контрольном сигнале MIMO, переданный терминалом пользователя. Тогда точка доступа может выполнить сингулярную декомпозицию для оценки калиброванного ответа канала восходящей линии связи  , для, для того, чтобы получить диагональную матрицу
, для, для того, чтобы получить диагональную матрицу  и матрицу
и матрицу левых собственных векторов из
левых собственных векторов из  . Эта сингулярная декомпозиция может быть представлена как
. Эта сингулярная декомпозиция может быть представлена как  .
.
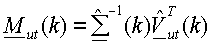
Однако из-за взаимного канала и калибровки, сингулярная декомпозиция должна быть выполнена только терминалом пользователя или точкой доступа. Если выполнена терминалом пользователя, то матрица  , для
, для  , используется для пространственной обработки в терминале пользователя, и матрица , для, может быть обеспечена в точке доступа в любой прямой форме (т.е. посылая элементы матриц ) или косвенной форме (например, через регулируемую ссылку, как описано ниже).
, используется для пространственной обработки в терминале пользователя, и матрица , для, может быть обеспечена в точке доступа в любой прямой форме (т.е. посылая элементы матриц ) или косвенной форме (например, через регулируемую ссылку, как описано ниже).
Сингулярным значениям в каждой матрице  , для, может быть задано такое, что первая колонка содержит наибольшее сингулярное значение, вторая колонка содержит следующее наибольшее сингулярное значение, и так далее (т.е.
, для, может быть задано такое, что первая колонка содержит наибольшее сингулярное значение, вторая колонка содержит следующее наибольшее сингулярное значение, и так далее (т.е.  , где
, где  является собственным значением в i-й колонке
является собственным значением в i-й колонке  после задания). Когда сингулярные значения для каждой матрицы
после задания). Когда сингулярные значения для каждой матрицы  заданы, собственные векторы (или колонки) связанных унитарных матриц
заданы, собственные векторы (или колонки) связанных унитарных матриц  и для той подполосы, также задаются соответственно. "Широкополосная" собственная мода может быть определена как набор того же самого порядка собственных мод всех подполос после упорядочения (т.е. m-я широкополосная собственная мода включает в себя m-е собственные моды всех подполос). Каждая широкополосная собственная мода связана с соответствующим набором собственных векторов для всех подполос. Основная широкополосная собственная мода представляет собой собственную моду, связанную с наибольшим сингулярным значением в каждой матрице
и для той подполосы, также задаются соответственно. "Широкополосная" собственная мода может быть определена как набор того же самого порядка собственных мод всех подполос после упорядочения (т.е. m-я широкополосная собственная мода включает в себя m-е собственные моды всех подполос). Каждая широкополосная собственная мода связана с соответствующим набором собственных векторов для всех подполос. Основная широкополосная собственная мода представляет собой собственную моду, связанную с наибольшим сингулярным значением в каждой матрице  после упорядочения.
после упорядочения.
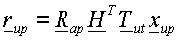
A. Пространственная обработка восходящей линии связи
Пространственная обработка терминалом пользователя для передачи восходящей линии связи может быть выражена как:
 , для Уравнение 14
, для Уравнение 14
где  представляет собой вектор передачи для восходящей линии связи для k-й подполосы; и
представляет собой вектор передачи для восходящей линии связи для k-й подполосы; и
 представляет собой вектор "данных" с до Ns элементами, отличными от нуля, для символов модуляции, которые будут переданы на Ns собственных модах k-й подполосы.
представляет собой вектор "данных" с до Ns элементами, отличными от нуля, для символов модуляции, которые будут переданы на Ns собственных модах k-й подполосы.
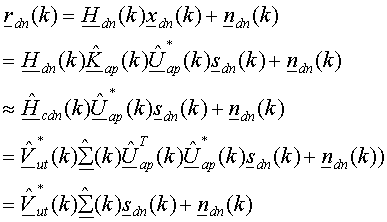
Принятая передача восходящей линии связи в точке доступа может быть выражена как:
 , для Уравнение 15
, для Уравнение 15
где  представляет собой принятый вектор для восходящей линии связи для k-й подполосы; и
представляет собой принятый вектор для восходящей линии связи для k-й подполосы; и
 представляет собой совокупные белые Гауссовы помехи (AWGN) для k-й подполосы.
представляет собой совокупные белые Гауссовы помехи (AWGN) для k-й подполосы.
Уравнение (15) использует следующие отношения:  и
и  .
.
Взвешенная матрица согласованного фильтра  для передачи восходящей линии связи от терминала пользователя может быть выражена как:
для передачи восходящей линии связи от терминала пользователя может быть выражена как:
 , для Уравнение 16
, для Уравнение 16
Пространственная обработка (или согласованная фильтрация) в точке доступа для принятой передачи восходящей линии связи может быть выражена как:
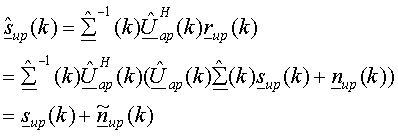 для Уравнение 17
для Уравнение 17
где  представляет собой оценку вектора данных
представляет собой оценку вектора данных  , переданную терминалом пользователя по восходящей линии связи, и
, переданную терминалом пользователя по восходящей линии связи, и  представляет собой постобработанные помехи.
представляет собой постобработанные помехи.
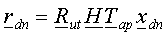
B. Пространственная обработка нисходящей линии связи
Пространственная обработка точкой доступа для передачи нисходящей линии связи может быть выражена как:
 , для , Уравнение 18
, для , Уравнение 18
где  представляет собой вектор передачи, и
представляет собой вектор передачи, и  представляет собой вектор данных для нисходящей линии связи.
представляет собой вектор данных для нисходящей линии связи.
Принятая передача нисходящей линии связи в терминале пользователя может быть выражена как:
 ,для , Уравнение 19
,для , Уравнение 19
Взвешенная матрица согласованного фильтра  для передачи нисходящей линии связи от точки доступа может быть выражена как:
для передачи нисходящей линии связи от точки доступа может быть выражена как:
 , для Уравнение 20
, для Уравнение 20
Пространственная обработка (или согласованная фильтрация) в терминале пользователя для принятой передачи нисходящей линии связи может быть выражена как:
 , для Уравнение 21
, для Уравнение 21
Таблица суммирует пространственную обработку в точке доступа и терминале пользователя для приема и передачи данных.




В вышеупомянутом описании и как показано в таблице, матрицы коррекции  и
и  применены на стороне передачи в точке доступа и терминале пользователя соответственно. Матрицы коррекции
применены на стороне передачи в точке доступа и терминале пользователя соответственно. Матрицы коррекции  и могут также быть объединены с другими диагональными матрицами (например, типа весовых матриц
и могут также быть объединены с другими диагональными матрицами (например, типа весовых матриц  и
и  используемых для достижения инверсии канала). Однако матрицы коррекции также могут быть применены на сторону приема, вместо стороны передачи, и это находится в рамках изобретения.
используемых для достижения инверсии канала). Однако матрицы коррекции также могут быть применены на сторону приема, вместо стороны передачи, и это находится в рамках изобретения.
Фиг.3 представляет собой блок-схему пространственной обработки для нисходящей линии связи и восходящей линии связи для способа пространственного мультиплексирования, в соответствии с одним вариантом осуществления изобретения.
Для нисходящей линии связи в пространственном ТХ процессоре 120x точки доступа 110х, вектор данных , для , сначала умножается с матрицей  посредством блока 310 и затем дополнительно умножается с матрицей коррекции
посредством блока 310 и затем дополнительно умножается с матрицей коррекции  посредством блока 312 для того, чтобы получить вектор передачи . Вектор
посредством блока 312 для того, чтобы получить вектор передачи . Вектор , для, затем обрабатывается цепью передачи 314 в модуляторе 122x и передается по каналу MIMO на терминал пользователя 150x. Блок 310 выполняет пространственную обработку для передачи данных нисходящей линии связи.
, для, затем обрабатывается цепью передачи 314 в модуляторе 122x и передается по каналу MIMO на терминал пользователя 150x. Блок 310 выполняет пространственную обработку для передачи данных нисходящей линии связи.
В терминале пользователя 150x сигналы нисходящей линии связи обрабатываются цепью приема 354 в демодуляторе 154x для того, чтобы получить вектор приема  , для. В пространственном RX процессоре 160x, вектор приема
, для. В пространственном RX процессоре 160x, вектор приема  , для , сначала умножается с матрицей
, для , сначала умножается с матрицей  посредством блока 356 и дополнительно измеряется обратной диагональной матрицей
посредством блока 356 и дополнительно измеряется обратной диагональной матрицей  посредством блока 358 для того, чтобы получить вектор
посредством блока 358 для того, чтобы получить вектор  , который является оценкой вектора данных . Блоки 356 и 358 выполняют пространственную обработку для подобранной фильтрации нисходящей линии связи.
, который является оценкой вектора данных . Блоки 356 и 358 выполняют пространственную обработку для подобранной фильтрации нисходящей линии связи.
Для восходящей линии связи в пространственном ТХ процессоре 190x терминала пользователя 150x, вектор данных , для, сначала умножается с матрицей  посредством блока 360 и затем дополнительно умножается с матрицей коррекции посредством блока 362 для того, чтобы получить вектор передачи . Вектор
посредством блока 360 и затем дополнительно умножается с матрицей коррекции посредством блока 362 для того, чтобы получить вектор передачи . Вектор  , для , затем обрабатывается цепью передачи 364 в модуляторе 154x и передается по каналу MIMO в точку доступа 110x. Блок 360 выполняет пространственную обработку для передачи данных восходящей линии связи.
, для , затем обрабатывается цепью передачи 364 в модуляторе 154x и передается по каналу MIMO в точку доступа 110x. Блок 360 выполняет пространственную обработку для передачи данных восходящей линии связи.
В точке доступа 110 сигналы восходящей линии связи обрабатываются цепью приема 324 в демодуляторе 122x для того, чтобы получить вектор приема  , для. В пространственном RX процессоре 140x вектор приема , для, сначала умножается с матрицей
, для. В пространственном RX процессоре 140x вектор приема , для, сначала умножается с матрицей посредством блока 326 и дополнительно измеряется обратной диагональной матрицей
посредством блока 326 и дополнительно измеряется обратной диагональной матрицей  посредством блока 328 для того, чтобы получить вектор
посредством блока 328 для того, чтобы получить вектор  , который является оценкой вектора данных . Блоки 326 и 328 выполняют пространственную обработку для согласованной фильтрации восходящей линии связи.
, который является оценкой вектора данных . Блоки 326 и 328 выполняют пространственную обработку для согласованной фильтрации восходящей линии связи.
3. Регулирование луча
Для определенных режимов канала лучше передать данные только на одной широкополосной собственной моде - обычно лучшей или основной широкополосной собственной моде. Это может иметь место, если принятые отношения сигнала к помехам (SNRs) для всех других широкополосных собственных мод достаточно плохи для того, чтобы улучшенные характеристики были достигнуты при использовании всей доступной энергии передачи на основной широкополосной собственной моде.
Передача данных на одной широкополосной собственной моде может быть достигнута, используя или формирование луча или регулирование луча. Для формирования луча символы модуляции пространственно обрабатываются с собственными векторами или
или  , для
, для  , для основной широкополосной собственной моды (т.е. первая колонка или , после задания). Для регулирования луча символы модуляции пространственно обрабатываются с рядом "нормализованных" (или "насыщенных"), собственных векторов
, для основной широкополосной собственной моды (т.е. первая колонка или , после задания). Для регулирования луча символы модуляции пространственно обрабатываются с рядом "нормализованных" (или "насыщенных"), собственных векторов  или
или  , для , для основной широкополосной собственной моды. Для ясности, регулирование луча описано ниже для восходящей линии связи.
, для , для основной широкополосной собственной моды. Для ясности, регулирование луча описано ниже для восходящей линии связи.
Для восходящей линии связи элементы каждого собственного вектора , для , для основной широкополосной собственной моды, могут иметь различные величины. Таким образом, предобусловленные символы для каждой подполосы, которые получены, посредством умножения символа модуляции для подполосы k с элементами собственного вектора для подполосы k, могут тогда иметь различные величины. Следовательно, per-антенна передает векторы, каждый из которых включает в себя предварительно кондиционированные символы для всех подполос данных к антенне передачи, могут иметь различные величины. Если переданная мощность для каждой антенны передачи ограничена (например, из-за ограничений усилителей мощности), то формирование луча, возможно, полностью не использует полную мощность, доступную для каждой антенны.
Регулирование луча использует только информацию фазы от собственных векторов , для, для основной широкополосной собственной моды и нормализует каждый собственный вектор так, что все элементы в собственном векторе имеют равные величины. Нормализованный собственный вектор для k-й подполосы может быть выражен как:
 , Уравнение 22
, Уравнение 22
где A представляет собой константу (например, А=1); и
 представляет собой фазу для k-й подполосы j-й антенны передачи, которая дается как:
представляет собой фазу для k-й подполосы j-й антенны передачи, которая дается как:
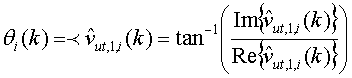 Уравнение 23
Уравнение 23
Как показано в уравнении (23), фаза каждого элемента в векторе  получена от соответствующего элемента собственного вектора
получена от соответствующего элемента собственного вектора  (т.е.
(т.е.  получен от
получен от  где
где 
A. Регулирование луча восходящей линии связи
Пространственная обработка терминалом пользователя для регулирования луча на восходящей линии связи может быть выражена как:
 , для Уравнение 24
, для Уравнение 24
где представляет собой символ модуляции, который будет передан на k-й подполосе; и
представляет собой символ модуляции, который будет передан на k-й подполосе; и  представляет собой вектор передачи для k-й подполосы для регулирования луча.
представляет собой вектор передачи для k-й подполосы для регулирования луча.
Как показано в уравнении (22), элементыNut нормализованного регулируемого векторадля каждой подполосы имеют равную величину, но возможно различные фазы. Регулирование луча таким образом генерирует каждый вектор передачи для каждой подполосы с элементамиNut из имеющий ту же самую величину, но возможно различные фазы.
для каждой подполосы с элементамиNut из имеющий ту же самую величину, но возможно различные фазы.
Принятая передача по восходящей линии связи в точке доступа для регулирования луча может быть выражена как:
 , для , Уравнение 25
, для , Уравнение 25
где  представляет собой принятый вектор для канала восходящей связи для k-й подполосы для регулирования луча.
представляет собой принятый вектор для канала восходящей связи для k-й подполосы для регулирования луча.
Согласованный вектор-строка фильтра  для передачи по восходящей линии связи, использующий регулирование луча может быть выражен как:
для передачи по восходящей линии связи, использующий регулирование луча может быть выражен как:
 , для . Уравнение 26
, для . Уравнение 26
Согласованный вектор фильтра  может быть получен как описано ниже. Пространственная обработка (или согласованная фильтрация) в точке доступа для принятой передачи по восходящей линии связи с регулированием луча может быть выражена как:
может быть получен как описано ниже. Пространственная обработка (или согласованная фильтрация) в точке доступа для принятой передачи по восходящей линии связи с регулированием луча может быть выражена как:
 , для , Уравнение 27
, для , Уравнение 27
где  (т.е.,
(т.е.,  представляет собой скалярное произведение и его сопряженного перемещения),
представляет собой скалярное произведение и его сопряженного перемещения),
 представляет собой оценку символа модуляции, переданного терминалом пользователя по восходящей линии связи, и
представляет собой оценку символа модуляции, переданного терминалом пользователя по восходящей линии связи, и
 представляет собой постобработанные помехи.
представляет собой постобработанные помехи.
B. Регулирование луча на нисходящей линии связи
Пространственная обработка точкой доступа для регулирования луча на нисходящей линии связи может быть выражена как:
 , для , Уравнение 28
, для , Уравнение 28
где  представляет собой нормализованный собственный вектор для k-й подполосы, который сгенерирован основываясь на собственном векторе
представляет собой нормализованный собственный вектор для k-й подполосы, который сгенерирован основываясь на собственном векторе  для основной широкополосной собственной моды, как описано выше.
для основной широкополосной собственной моды, как описано выше.
Подобранный вектор-строка фильтра для передачи по нисходящей линии связи, используя регулирование луча, может быть выражен как:
для передачи по нисходящей линии связи, используя регулирование луча, может быть выражен как:
 , для Уравнение 29
, для Уравнение 29
Пространственная обработка (или согласованная фильтрация) в терминале пользователя для принятой передачи по нисходящей линии связи может быть выражена как:
 для , Уравнение 30
для , Уравнение 30
где  (т.е.,
(т.е.,  представляет собой скалярное произведение
представляет собой скалярное произведение  и его сопряженного перемещения).
и его сопряженного перемещения).
Регулирование луча может быть рассмотрено как специальный случай пространственной обработки, в которой только один собственный вектор для одной собственной моды используется для передачи данных, и этот собственный вектор нормализован для того, чтобы иметь равные величины.
Фиг.4 представляет собой блок-схему пространственной обработки для нисходящей линии связи и восходящей линии связи для регулирующего луч способа, в соответствии с одним вариантном осуществления изобретения.
Для нисходящей линии связи в пространственном ТХ процессоре 120y точки доступа 110y символ модуляции  , для, сначала умножается с нормализованным собственным вектором
, для, сначала умножается с нормализованным собственным вектором  (k) блоком 410 и затем дополнительно умножается с матрицей коррекции
(k) блоком 410 и затем дополнительно умножается с матрицей коррекции блоком 412 для того, чтобы получить вектор передачи
блоком 412 для того, чтобы получить вектор передачи  . Вектор, для, затем обрабатывается цепью передачи 414 в модуляторе 122y и передается по MIMO каналу на терминал пользователя 150y. Блок 410 выполняет пространственную обработку для передачи данных по нисходящей линии связи для регулирующего луч способа.
. Вектор, для, затем обрабатывается цепью передачи 414 в модуляторе 122y и передается по MIMO каналу на терминал пользователя 150y. Блок 410 выполняет пространственную обработку для передачи данных по нисходящей линии связи для регулирующего луч способа.
В терминале пользователя 150y сигналы нисходящей линии связи обрабатываются цепью приема 454 в демодуляторе 154y для того, чтобы получить вектор приема  , для. В пространственном RX процессоре 160y блок 456 выполняет скалярное произведение вектора , для , с подобранным вектором фильтра . Результат скалярного произведения затем измеряется
, для. В пространственном RX процессоре 160y блок 456 выполняет скалярное произведение вектора , для , с подобранным вектором фильтра . Результат скалярного произведения затем измеряется  блоком 458 для того, чтобы получить символ
блоком 458 для того, чтобы получить символ  , который является оценкой символа модуляции
, который является оценкой символа модуляции  . Блоки 456 и 458 выполняют пространственную обработку для согласованной фильтрации нисходящей линии связи для регулирующего луч способа.
. Блоки 456 и 458 выполняют пространственную обработку для согласованной фильтрации нисходящей линии связи для регулирующего луч способа.
Для восходящей линии связи в пространственном ТХ процессоре 190y терминала пользователя 150y символ модуляции, для, сначала умножается с нормализованным собственным векторомблоком 460 и затем дополнительно умножается с матрицей коррекции  блоком 462 для того, чтобы получить вектор передачи . Вектор , для, затем обрабатывается цепью передачи 464 в модуляторе 154y и передается по каналу MIMO в точку доступа 110y. Блок 460 выполняет пространственную обработку для передачи данных по восходящей линии связи для регулирующего луч способа.
блоком 462 для того, чтобы получить вектор передачи . Вектор , для, затем обрабатывается цепью передачи 464 в модуляторе 154y и передается по каналу MIMO в точку доступа 110y. Блок 460 выполняет пространственную обработку для передачи данных по восходящей линии связи для регулирующего луч способа.
В точке доступа 110у, сигналы восходящей линии связи обрабатываются цепью приема 424 в демодуляторе 124y для того, чтобы получить вектор приема  , для . В пространственном RX процессоре 140y блок 426 выполняет скалярное произведение вектора приема , для, с подобранным вектором фильтра . Результат скалярного произведения затем измеряется
, для . В пространственном RX процессоре 140y блок 426 выполняет скалярное произведение вектора приема , для, с подобранным вектором фильтра . Результат скалярного произведения затем измеряется  блоком 428 для того, чтобы получить символ
блоком 428 для того, чтобы получить символ , который является оценкой символа модуляции
, который является оценкой символа модуляции  . Блоки 426 и 428 выполняют пространственную обработку для согласованной фильтрации восходящей линии связи для регулирующего луч способа.
. Блоки 426 и 428 выполняют пространственную обработку для согласованной фильтрации восходящей линии связи для регулирующего луч способа.
4. Регулируемый опорный сигнал (регулируемая ссылка)
Как показано в уравнении (15), в точке доступа, принятый вектор , для , восходящей линии связи, в отсутствии помех, равен вектору данных , преобразованному  , который является матрицей левых собственных векторов
, который является матрицей левых собственных векторов  , измеренных диагональной матрицей
, измеренных диагональной матрицей  сингулярных значений. Как показано в уравнениях (17) и (18), из-за взаимного канала и калибровки, матрица
сингулярных значений. Как показано в уравнениях (17) и (18), из-за взаимного канала и калибровки, матрица и ее перемещение используются для пространственной обработки передачи нисходящей линии связи и пространственной обработки (согласованной фильтрации) принятой передачи восходящей линии связи, соответственно.
и ее перемещение используются для пространственной обработки передачи нисходящей линии связи и пространственной обработки (согласованной фильтрации) принятой передачи восходящей линии связи, соответственно.
Регулируемая ссылка (или регулируемый контрольный сигнал) может быть передана терминалом пользователя и использоваться точкой доступа для того, чтобы получить оценки и и  , для
, для  , не имея необходимость оценивать MIMO канал или выполнять сингулярную декомпозицию. Точно так же регулируемая ссылка может быть передана точкой доступа и использоваться терминалом пользователя для того, чтобы получить оценки и и
, не имея необходимость оценивать MIMO канал или выполнять сингулярную декомпозицию. Точно так же регулируемая ссылка может быть передана точкой доступа и использоваться терминалом пользователя для того, чтобы получить оценки и и .
.
Регулируемая ссылка содержит определенный символ OFDM (который называется контрольным сигналом или "P" OFDM символом), который передается от всех антеннNut в терминале пользователя (для восходящей линии связи) или антенн Nap в точке доступа (для нисходящей линии связи). P OFDM символ передается только на одной широкополосной собственной моде, выполняя пространственную обработку с набором собственных векторов для той широкополосной собственной моды.
A. Регулируемая ссылка восходящей линии связи
Регулируемая ссылка восходящей линии связи, переданная терминалом пользователя может быть выражена как:
 , для , Уравнение 31
, для , Уравнение 31
где представляет собой вектор передачи для k-й подполосы m-й широкополосной собственной моды;
представляет собой вектор передачи для k-й подполосы m-й широкополосной собственной моды;
 представляет собой собственный вектор для k-й подполосы m-й широкополосной собственной моды; и
представляет собой собственный вектор для k-й подполосы m-й широкополосной собственной моды; и
p(k) представляет собой символ модуляции контрольного сигнала, который был передан на k-й подполосе.
Собственный вектор представляет собой m-ю колонку матрицы , где
представляет собой m-ю колонку матрицы , где  .
.
Принятая регулируемая ссылка восходящей линии связи в точке доступа может быть выражена как:
 , для , Уравнение 32
, для , Уравнение 32
где представляет собой принятый вектор для регулируемой ссылки восходящей линии связи для k-й подполосы m-й широкополосной собственной моды; и
представляет собой принятый вектор для регулируемой ссылки восходящей линии связи для k-й подполосы m-й широкополосной собственной моды; и
 представляет собой сингулярное значение для k-й подполосы m-й широкополосной собственной моды.
представляет собой сингулярное значение для k-й подполосы m-й широкополосной собственной моды.
Методы оценки ответа канала, основанные на регулируемой ссылке, описаны в деталях ниже.
B. Регулируемая ссылка нисходящей линии связи
Регулируемая ссылка нисходящей линии связи, переданная точкой доступа, может быть выражена как:
 , для , Уравнение 33,
, для , Уравнение 33,
где представляет собой вектор передачи для k-й подполосы m-й широкополосной собственной моды; и
представляет собой вектор передачи для k-й подполосы m-й широкополосной собственной моды; и
 представляет собой собственный вектор для k-й подполосы m-й широкополосной собственной моды. Регулируемый вектор
представляет собой собственный вектор для k-й подполосы m-й широкополосной собственной моды. Регулируемый вектор представляет собой m-ю колонку матрицы
представляет собой m-ю колонку матрицы  , где
, где  .
.
Регулируемая ссылка нисходящей линии связи может быть использована терминалом пользователя в различных целях. Например, регулируемая ссылка нисходящей линии связи позволяет терминалу пользователя определять, какую оценку для канала MIMO имеет точка доступа (так как точка доступа имеет оценку оценки канала). Регулируемая ссылка нисходящей линии связи может также быть использована терминалом пользователя для оценки принятой SNR передачи нисходящей линии связи.
C. Регулируемая ссылка для регулирования луча
Для регулирующего луч способа пространственная обработка на стороне передачи выполнена, используя ряд нормализованных собственных векторов для основной широкополосной собственной моды. Полная функция передачи с нормализованным собственным вектором отличается от полной функции передачи с ненормализованным собственным вектором (т.е.,  ). Регулируемая ссылка, сгенерированная, используя набор нормализованных собственных векторов для всех подполос, затем может быть послана передатчиком и использована приемником для того, чтобы получить согласованные векторы фильтра для этих подполос для регулирующего луч способа.
). Регулируемая ссылка, сгенерированная, используя набор нормализованных собственных векторов для всех подполос, затем может быть послана передатчиком и использована приемником для того, чтобы получить согласованные векторы фильтра для этих подполос для регулирующего луч способа.
Для канала восходящей линии связи, регулируемая ссылка для регулирующего луч способа может быть выражена как:
 , для Уравнение 34
, для Уравнение 34
В точке доступа, регулируемая ссылка приема восходящей линии связи для регулирующего луч способа может быть выражена как:
 , для Уравнение 35
, для Уравнение 35
Чтобы получить согласованный вектор-строку фильтра  для передачи с регулированием луча восходящей линии связи, принятый вектор
для передачи с регулированием луча восходящей линии связи, принятый вектор  для регулируемой ссылки сначала умножают с
для регулируемой ссылки сначала умножают с  . Затем результат объединяют по многократным принятым символам регулируемой ссылки для того, чтобы сформировать оценку
. Затем результат объединяют по многократным принятым символам регулируемой ссылки для того, чтобы сформировать оценку  . Вектор затем объединяет перемещение этой оценки.
. Вектор затем объединяет перемещение этой оценки.
Работая в регулирующем луч способе, терминал пользователя может передать множество символов регулируемой ссылки, например, один или более символов, используя нормализованный собственный вектор  , один или более символов, используя собственный вектор
, один или более символов, используя собственный вектор для основной собственной моды, и возможно один или более символов, используя собственные векторы для другой собственной моды. Символы регулируемой ссылки, сгенерированные с могут быть использованы точкой доступа для того, чтобы получить подобранный вектор фильтра . Символы регулируемой ссылки, сгенерированные с
для основной собственной моды, и возможно один или более символов, используя собственные векторы для другой собственной моды. Символы регулируемой ссылки, сгенерированные с могут быть использованы точкой доступа для того, чтобы получить подобранный вектор фильтра . Символы регулируемой ссылки, сгенерированные с могут быть использованы для того, чтобы получить
могут быть использованы для того, чтобы получить , который может затем быть использован для того, чтобы получить нормализованный собственный вектор
, который может затем быть использован для того, чтобы получить нормализованный собственный вектор , используемый для регулирования луча на нисходящей линии связи. Символы регулируемой ссылки, сгенерированные с собственными векторами
, используемый для регулирования луча на нисходящей линии связи. Символы регулируемой ссылки, сгенерированные с собственными векторами  через
через для других собственных мод, могут быть использованы точкой доступа для того, чтобы получить
для других собственных мод, могут быть использованы точкой доступа для того, чтобы получить через
через и сингулярные значения для этих других собственных мод. Затем эта информация может быть использована точкой доступа для того, чтобы решить, использовать ли способ пространственного мультиплексирования или регулирующий луч способ для передачи данных.
и сингулярные значения для этих других собственных мод. Затем эта информация может быть использована точкой доступа для того, чтобы решить, использовать ли способ пространственного мультиплексирования или регулирующий луч способ для передачи данных.
Для нисходящей линии связи, терминал пользователя может получить согласованный вектор фильтра для регулирующего луч способа, основанный на калиброванной оценке ответа канала нисходящей линии связи
для регулирующего луч способа, основанный на калиброванной оценке ответа канала нисходящей линии связи  . В частности, терминал пользователя имеет от сингулярной декомпозиции и может получить нормализованный собственный вектор. Терминал пользователя может затем умножить с
. В частности, терминал пользователя имеет от сингулярной декомпозиции и может получить нормализованный собственный вектор. Терминал пользователя может затем умножить с для того, чтобы получить
для того, чтобы получить  , и может затем получить
, и может затем получить  , основанный на. Альтернативно, регулируемую ссылку можно послать точкой доступа, используя нормализованный собственный вектор, и эта регулируемая ссылка может быть обработана терминалом пользователя способом, описанным выше, чтобы получить .
, основанный на. Альтернативно, регулируемую ссылку можно послать точкой доступа, используя нормализованный собственный вектор, и эта регулируемая ссылка может быть обработана терминалом пользователя способом, описанным выше, чтобы получить .
D. Оценка канала, основанная на регулируемой ссылке
Как показано в уравнении (32), в точке доступа, принятая регулируемая ссылка восходящей линии связи (в отсутствии помех) - приблизительно  . Точка доступа может таким образом получить оценку ответа канала восходящей линии связи, основанную на регулируемой ссылке, посланной терминалом пользователя. Различные методы оценки могут быть использованы для того, чтобы получить оценку ответа канала.
. Точка доступа может таким образом получить оценку ответа канала восходящей линии связи, основанную на регулируемой ссылке, посланной терминалом пользователя. Различные методы оценки могут быть использованы для того, чтобы получить оценку ответа канала.
В одном варианте осуществления для того, чтобы получить оценку  , принятый вектор, для регулируемой ссылки для m-ой широкополосной собственной моды, сначала умножают с комплексом, сопряженным из символа модуляции контрольного сигнала, p*(k), используемого для регулируемой ссылки. Результат затем объединяют по множеству принятым символам регулируемой ссылки для каждой широкополосной собственной моды для того, чтобы получить оценку
, принятый вектор, для регулируемой ссылки для m-ой широкополосной собственной моды, сначала умножают с комплексом, сопряженным из символа модуляции контрольного сигнала, p*(k), используемого для регулируемой ссылки. Результат затем объединяют по множеству принятым символам регулируемой ссылки для каждой широкополосной собственной моды для того, чтобы получить оценку , которая измеряет левый собственный вектор
, которая измеряет левый собственный вектор для m-й широкополосной собственной моды. Каждые из Nap элементов
для m-й широкополосной собственной моды. Каждые из Nap элементов  получены на основании соответствующего одного из Nap элементов для
получены на основании соответствующего одного из Nap элементов для , где Nap элементы - принятые символы, полученные от антенн Nap в точке доступа. Так как собственные векторы имеют единичную мощность, сингулярное значение
, где Nap элементы - принятые символы, полученные от антенн Nap в точке доступа. Так как собственные векторы имеют единичную мощность, сингулярное значение может быть оценено на основании полученной мощности регулируемой ссылки, которая может быть измерена для каждой подполосы каждой широкополосной собственной моды.
может быть оценено на основании полученной мощности регулируемой ссылки, которая может быть измерена для каждой подполосы каждой широкополосной собственной моды.
В другом варианте осуществления, метод минимальной среднеквадратической ошибки (MMSE) используется для того, чтобы получить оценку, основанную на принятом векторе для регулируемой ссылки. Так как символы p(k) модуляции контрольного сигнала известны, точка доступа может получить оценку так, как среднеквадратическая ошибка между принятыми символами контрольного сигнала (полученная после выполнения подобранного фильтрования на принятом векторе) и переданными символами контрольного сигнала минимизирована. Использование метода MMSE для пространственной обработки в приемнике подробно описано в США заявке на патент № 09/993,087, названной "Multiple-Access Multiple-Input Multiple-Output (MIMO) Communication System", поданной 6 ноября 2001 г.
Регулируемую ссылку посылают для одной широкополосной моды в любой данный период символа, и может в свою очередь использоваться для того, чтобы получить оценку одного собственного вектора для каждой подполосы той широкополосной собственной моды. Таким образом, приемник в состоянии получить оценку одного собственного вектора в унитарной матрице в течение любого данного периода символа. Так как оценки многократных собственных векторов для унитарной матрицы получены за различные периоды символа, и из-за помех и других источников ухудшения в дорожке передачи, оцененные собственные векторы для унитарной матрицы вряд ли будут ортогональными. Если оцененные собственные векторы впоследствии используются для пространственной обработки передачи данных на другой линии связи, то любые ошибки в ортогональности в этих оцененных собственных векторах привели бы к перекрестной связи среди собственных мод, которая может ухудшить производительность.
В варианте осуществления, оцененные собственные векторы для каждой унитарной матрицы вынуждены быть ортогональными друг к другу. Ортогонализация собственных векторов может быть достигнута, используя технику Грам-Шмидта, которая подробно описана в вышеупомянутой ссылке от Гильберта Странга, или некоторого другого метода.
Другие методы для оценки ответа канала, основанной на регулируемой ссылке могут также быть использованы, и это находится в рамках изобретения.
Точка доступа может таким образом оценить и и
и  основываясь на регулируемой ссылке, посланной терминалом пользователя, не имея необходимость оценивать ответ канала восходящей линии связи или выполнять сингулярную декомпозицию на. Так как толькоNutширокополосных собственных мод имеют любую мощность, матрица левых собственных векторов
основываясь на регулируемой ссылке, посланной терминалом пользователя, не имея необходимость оценивать ответ канала восходящей линии связи или выполнять сингулярную декомпозицию на. Так как толькоNutширокополосных собственных мод имеют любую мощность, матрица левых собственных векторов является эффективной(Nap × Nut), и матрица
является эффективной(Nap × Nut), и матрица может быть рассмотрена, чтобы быть (Nut × Nut)
может быть рассмотрена, чтобы быть (Nut × Nut)
Обработка в терминале пользователя для оценки матриц и  , для, основанной на регулируемой ссылке нисходящей линии связи, может быть выполнена подобно регулируемой ссылке восходящей линии связи, описанной выше.
, для, основанной на регулируемой ссылке нисходящей линии связи, может быть выполнена подобно регулируемой ссылке восходящей линии связи, описанной выше.
5. Оценка канала и пространственная обработка
Фиг.5 представляет собой блок-схему определенного варианта осуществления процесса 500 для выполнения оценки канала и пространственной обработки в точке доступа и терминале пользователя, в соответствии с одним вариантом осуществления изобретения. Процесс 500 включает в себя две части - калибровка (блок 510), и нормальная операция (блок 520).
Первоначально, точка доступа и терминал пользователя выполняют калибровку для того, чтобы определить различия в ответах их цепей приема и передачи и получить матрицы коррекции  и, для (в блоке 512). Калибровка должна быть выполнена лишь однажды (например, в начале сеанса связи, или в самый первый раз, когда терминал пользователя включают). Матрицы коррекции и впоследствии используются точкой доступа и терминалом пользователя, соответственно, на стороне передачи, как описано выше.
и, для (в блоке 512). Калибровка должна быть выполнена лишь однажды (например, в начале сеанса связи, или в самый первый раз, когда терминал пользователя включают). Матрицы коррекции и впоследствии используются точкой доступа и терминалом пользователя, соответственно, на стороне передачи, как описано выше.
В течение нормальной работы, точка доступа передает контрольный сигнал MIMO на калиброванный канал нисходящей линии связи (в блоке 522). Терминал пользователя принимает и обрабатывает контрольный сигнал MIMO, оценивает ответ калиброванного канала нисходящей линии связи, основанный на полученном контрольном сигнале MIMO, и поддерживает оценку ответа калиброванного канала нисходящей линии связи (в блоке 524). Это показывает, что характеристики лучше (т.е. меньше ухудшения), когда оценка ответа канала точна. Точная оценка ответа канала может быть получена, составляя в среднем оценки, полученные из множества принятых передач контрольного сигнала MIMO.
Терминал пользователя затем анализирует калиброванную оценку ответа канала нисходящей линии связи, , для , для того, чтобы получить диагональную матрицу
, для , для того, чтобы получить диагональную матрицу  и унитарную матрицу
и унитарную матрицу (в блоке 526). Матрица
(в блоке 526). Матрица содержит и левые собственные векторы
содержит и левые собственные векторы и
и и правые собственные векторы. Матрица
и правые собственные векторы. Матрица таким образом может быть использована терминалом пользователя для того, чтобы выполнить пространственную обработку для передачи данных, принятой на нисходящей линии связи так же, как для передачи данных, которая будет послана по восходящей линии связи.
таким образом может быть использована терминалом пользователя для того, чтобы выполнить пространственную обработку для передачи данных, принятой на нисходящей линии связи так же, как для передачи данных, которая будет послана по восходящей линии связи.
Терминал пользователя затем передает регулируемую ссылку по восходящей линии связи в точку доступа, используя собственные векторы в матрице , как показано в уравнении (31) (в блоке 530). Точка доступа принимает и обрабатывает регулируемую ссылку восходящей линии связи для того, чтобы получить диагональную матрицу  и унитарную матрицу
и унитарную матрицу , для (в блоке 532).
, для (в блоке 532).
Матрица содержит и левые собственные векторы и и правые собственные векторы . Матрица может таким образом использоваться точкой доступа для того, чтобы выполнить пространственную обработку для передачи данных, принятой по восходящей линии связи так же, как для передачи данных, которая будет послана по нисходящей линии связи.
Матрица, для, получена на основании оценки регулируемой ссылки восходящей линии связи, которая в свою очередь сгенерирована с собственным вектором, который получен на основании оценки ответа калиброванного канала нисходящей линии связи. Таким образом, матрица эффективно оценивает оценку. Точка доступа может усреднить передачи регулируемой ссылки восходящей линии связи для того, чтобы получить более точную оценку фактической матрицы.
эффективно оценивает оценку. Точка доступа может усреднить передачи регулируемой ссылки восходящей линии связи для того, чтобы получить более точную оценку фактической матрицы.
Как только терминал пользователя и точка доступа получают matrices и, соответственно, передача данных может начаться на нисходящей линии связи и/или восходящей линии связи. Для передачи данных нисходящей линии связи точка доступа выполняет пространственную обработку на символах с матрицей правых собственных векторов и передает на терминал пользователя (в блоке 540). Терминал пользователя затем получает и пространственно обрабатывает передачу данных нисходящей линии связи с матрицей, которая является объединенным перемещением матрицы левых собственных векторов (в блоке 542). Для передачи данных восходящей линии связи, терминал пользователя выполняет пространственную обработку на символах с матрицей
левых собственных векторов (в блоке 542). Для передачи данных восходящей линии связи, терминал пользователя выполняет пространственную обработку на символах с матрицей  правых собственных векторов , и передает в точку доступа (в блоке 550). Точка доступа получает и пространственно обрабатывает передачу данных восходящей линии связи с матрицей
правых собственных векторов , и передает в точку доступа (в блоке 550). Точка доступа получает и пространственно обрабатывает передачу данных восходящей линии связи с матрицей , которая является объединенной с перемещением матрицылевых собственных векторов
, которая является объединенной с перемещением матрицылевых собственных векторов  (в блоке 552).
(в блоке 552).
Передача данных по нисходящей линии связи и/или восходящей линии связи может продолжаться до тех пор, пока не будет прекращена точкой доступа или терминалом пользователя. В то время как терминал пользователя неактивен (т.е. не имеет данных для приема и передачи), контрольный сигнал MIMO и/или регулируемая ссылка могут все еще отсылаться для того, чтобы позволить точке доступа и терминалу пользователя поддерживать самые свежие оценки ответов канала нисходящей линии связи и канала восходящей линии связи, соответственно. Тогда это позволит передаче данных начинаться быстро, даже при возобновлении.
Для ясности, оценка канала и методы пространственной обработки были описаны для определенного варианта осуществления, в котором терминал пользователя оценивает ответ калиброванного канала нисходящей линии связи, основанный на контрольном сигнале MIMO канала нисходящей линии связи и выполняет сингулярную декомпозицию. Оценка канала и сингулярная декомпозиция могут также быть выполнены точкой доступа, и это находится в рамках изобретения. В общем, из-за взаимного канала для TDD системы, оценка канала должна быть выполнена только в одном конце связи.
Методы, описанные здесь, могут быть использованы с или без калибровки. Калибровка может быть выполнена для того, чтобы улучшить оценки канала, которые могут затем улучшить характеристики системы.
Методы, описанные здесь, могут также быть использованы в соединении с другими методами пространственной обработки, такими как water-filling (водное заполнение) для распределения мощности передачи среди широкополосных собственных мод, и инверсия канала для распределения мощности передачи среди подполос каждой широкополосной собственной моды. Инверсия канала и water-filling описаны в вышеупомянутой США заявке на патент № 60/421,309.
Оценка канала и пространственные методы обработки, описанные здесь, могут быть осуществлены различными средствами. Например, эти методы могут быть осуществлены в аппаратных средствах, программном обеспечении, или в их комбинации. Для выполнения в аппаратных средствах элементы используются для осуществления методов, описанных здесь, могут быть осуществлены в пределах одной или более специализированных интегральных схем (ASICs), цифровых обработчиков сигнала (DSP), обрабатывающих устройств цифрового сигнала (DSPD), программируемых логических устройств (PLD), программируемых матриц логических элементов (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, других электронных блоков, предназначенных для выполнения функций, описанных здесь, или их комбинации.
Для выполнения в программном обеспечении, оценка канала и методы пространственной обработки могут быть осуществлены с модулями (например, процедуры, функции, и так далее), которые выполняют функции, описанные здесь. Коды программного обеспечения могут быть сохранены в блоке памяти (например, блоке памяти 132 и 182 на Фиг.1) и выполнены процессором (например, контроллеры 130 и 180). Блок памяти может быть использован в процессоре или вне его, в некоторых случаях это может быть объединено с процессором через различные средства, как известно в области техники.
Заголовки включены здесь для ссылки и помощи в расположении определенных секций. Эти заголовки не предназначены для того, чтобы ограничить возможности понятий, описанных там, и эти понятия могут иметь применимость в других секциях всюду по всей спецификации.
Предыдущее описание раскрытых вариантов осуществления обеспечивается для того, чтобы позволить любому человеку, квалифицированному в данной области техники, сделать или использовать данное изобретение. Различные модификации к этим вариантам осуществления будут очевидны специалистам в данной области техники, и основные принципы, определенные здесь, могут быть применены к другим вариантам осуществления, не отступая от сущности или объема изобретения. Таким образом, данное изобретение не предназначено для того, чтобы быть ограниченным вариантами осуществления, показанными здесь, но должно получить самые широкие возможности, совместимые с принципами и новыми признаками, раскрытыми здесь.

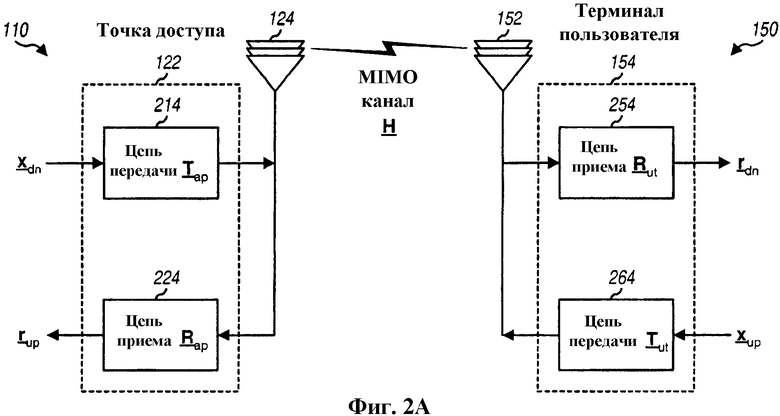
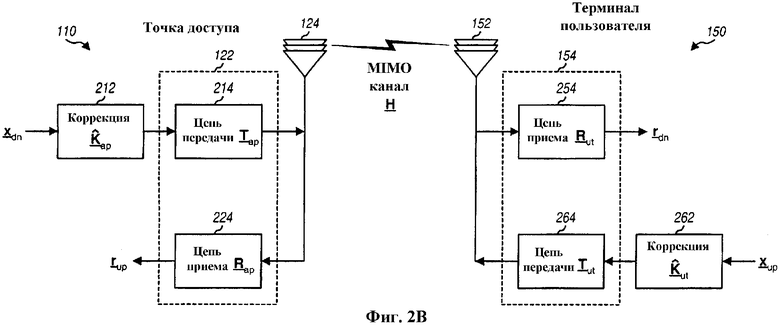


Изобретение относится к технике связи и может использоваться для оценки канала и пространственной обработки для MIMO системы. Технический результат состоит в составлении различия в ответах цепей приема/передачи в точке доступа и терминале пользователя. Для этого в течение нормальной операции, пилот-сигнал MIMO передается на первую линию связи и используется для получения оценки ответа канала первой линии связи, который разложен для получения диагональной матрицы сингулярных значений и первой унитарной матрицы, содержащей и левые собственные векторы первой линии связи и правые собственные векторы второй линии связи. Регулируемый опорный сигнал (ссылка) передается по второй линии связи, используя собственные векторы в первой унитарной матрице, и обрабатывается для получения диагональной матрицы и второй унитарной матрицы, содержащей и левые собственные векторы второй линии связи и правые собственные векторы первой линии связи. Каждая унитарная матрица может быть использована для выполнения пространственной обработки для приема/передачи данных на обеих линиях связи. 16 н. и 44 з.п. ф-лы, 6 ил., 1 табл.
обрабатывают сигнал первой передачи, принятый через первую линию связи для получения, по меньшей мере, одного собственного вектора, используемого для пространственной обработки и для передачи данных, принятой через первую линию связи и для передачи данных, посланных через вторую линию связи; и
выполняют пространственную обработку для сигнала второй передачи, с, по меньшей мере, одним собственным вектором до передачи по второй линии связи.
выполняют пространственную обработку на сигнале третьей передачи, принятом через первую линию связи, с, по меньшей мере, одним собственным вектором для восстановления символов данных для сигнала третьей передачи.
получают оценку ответа канала для первой линии связи на основании пилот-сигнала MIMO, и
осуществляют разложение оценки ответа канала для получения множества собственных векторов, используемых для пространственной обработки для первой и второй линий связи.
выполняют пространственную обработку на символах пилот-сигнала с, по меньшей мере, одним собственным вектором для генерирования регулируемого пилот-сигнала для передачи на, по меньшей мере, одной собственной моде канала MIMO для второй линии связи.
калибруют первую и вторую линии связи таким образом, что оценка ответа канала для первой линии связи является взаимной оценке ответа канала для второй линии связи.
получают поправочные коэффициенты для первой линии связи на основании оценок ответа канала для первой и второй линий связи, и
получают поправочные коэффициенты для второй линии связи на основании оценок ответа канала для первой и второй линий связи.
средство для обработки сигнала первой передачи, принятого через первую линию связи, для получения, по меньшей мере, одного собственного вектора, используемого для пространственной обработки и для передачи данных, принятой через первую линию связи и для передачи данных, посланных через вторую линию связи; и
средство для выполнения пространственной обработки для сигнала второй передачи с, по меньшей мере, одним собственным вектором до передачи по второй линии связи.
средство для выполнения пространственной обработки на сигнале третьей передачи, принятом через первую линию связи с, по меньшей мере, одним собственным вектором для восстановления символов данных для сигнала третьей передачи.
средство для получения оценки ответа канала для первой линии связи на основании пилот-сигнала MIMO; и
средство для разложения оценки ответа канала для получения множества собственных векторов, используемых для пространственной обработки для первой и второй линий связи.
контроллер, выполненный с возможностью обработки сигнала первой передачи, принятого через первую линию связи для получения, по меньшей мере, одного собственного вектора, используемого для пространственной обработки и для передачи данных, принятой через первую линию связи и для передачи данных, посланной через вторую линию связи; и
пространственный процессор передачи, выполненный с возможностью выполнения пространственной обработки для сигнала второй передачи с, по меньшей мере, одним собственным вектором до передачи по второй линии связи.
пространственный процессор приема, выполненный с возможностью выполнения пространственной обработки на сигнале третьей передачи, принятом через первую линию связи с, по меньшей мере, одним собственным вектором для восстановления символов данных для сигнала третьей передачи.
обрабатывают пилот-сигнал MIMO, принятый через первую линию связи, для получения множества собственных векторов, используемых для пространственной обработки и для передачи данных, принятых через первую линию связи и для передачи данных, посланной через вторую линию связи, причем пилот-сигнал MIMO содержит множество передач пилот-сигнала, посланных от множества передающих антенн, и при этом передача пилот-сигнала от каждой передающей антенны является идентифицируемой приемником пилот-сигнала MIMO;
выполняют пространственную обработку на первой передаче данных, принятой через первую линию связи с множеством собственных векторов для восстановления символов данных для первой передачи данных; и
выполняют пространственную обработку для второй передачи данных с множеством собственных векторов до передачи по второй линии связи.
выполняют калибровку для получения поправочных коэффициентов; и
масштабируют вторую передачу данных с поправочными коэффициентами до передачи по второй линии связи.
средство для обработки пилот-сигнала MIMO, принятого через первую линию связи, для получения множества собственных векторов, используемых для пространственной обработки и для передачи данных, принятой через первую линию связи и для передачи данных, посланной через вторую линию связи, причем пилот-сигнал MIMO содержит множество передач пилот-сигнала, посланных от множества передающих антенн, и при этом передача пилот-сигнала от каждой передающей антенны является идентифицируемым приемником пилот-сигнала MIMO;
средство для выполнения пространственной обработки на первой передаче данных, принятой через первую линию связи, с множеством собственных векторов для восстановления символов данных для первой передачи данных; и
средство для выполнения пространственной обработки для второй передачи данных с множеством собственных векторов до передачи по второй линии связи.
средство для выполнения пространственной обработки на символах пилот-сигнала с, по меньшей мере, одним из собственных векторов для генерирования регулируемого пилот-сигнала для передачи на, по меньшей мере, одной собственной моде MIMO канала для второй линии связи.
средство для выполнения калибровки для получения поправочных коэффициентов; и
средство для масштабирования второй передачи данных с поправочными коэффициентами до передачи по второй линии связи.
контроллер, выполненный с возможностью обработки пилот-сигнала MIMO, принятого через первую линию связи, для получения множества собственных векторов, используемых для пространственной обработки и для передачи данных, принятой через первую линию связи и для передачи данных, посланной через вторую линию связи, причем пилот-сигнал MIMO содержит множество передач пилот-сигнала, посланных от множества передающих антенн, и при этом передача пилот-сигнала от каждой передающей антенны является идентифицируемой приемником пилот-сигнала MIMO;
пространственный процессор приема, выполненный с возможностью выполнения пространственной обработки на первой передаче данных, принятой через первую линию связи с множеством собственных векторов для восстановления символов данных для первой передачи данных; и
пространственный процессор передачи, выполненный с возможностью выполнения пространственной обработки для второй передачи данных с множеством собственных векторов до передачи по второй линии связи.
обрабатывают регулируемый пилот-сигнал, принятый через, по меньшей мере, одну собственную моду MIMO канала для первой линии связи, для получения, по меньшей мере, одного собственного вектора, используемого для пространственной обработки и для передачи данных, принятой через первую линию связи и для передачи данных, посланной через вторую линию связи;
выполняют пространственную обработку на первой передаче данных, принятой через первую линию связи с, по меньшей мере, одним собственным вектором; и
выполняют пространственную обработку для второй передачи данных с, по меньшей мере, одним собственным вектором до передачи по второй линии связи.
средство для обработки регулируемого пилот-сигнала, принятого через, по меньшей мере, одну собственную моду MIMO канала для первой линии связи, для получения, по меньшей мере, одного собственного вектора, используемого для пространственной обработки и для передачи данных, принятой через первую линию связи и для передачи данных, посланной через вторую линию связи;
средство для выполнения пространственной обработки на первой передаче данных, принятой через первую линию связи с, по меньшей мере, одним собственным вектором; и
средство для выполнения пространственной обработки для второй передачи данных с, по меньшей мере, одним собственным вектором до передачи по второй линии связи.
средство для генерирования пилот-сигнала MIMO для передачи по второй линии связи, причем пилот-сигнал MIMO содержит множество передач пилот-сигнала, посланных от множества передающих антенн, и при этом передача пилот-сигнала от каждой передающей антенны является идентифицируемой приемником пилот-сигнала MIMO.
контроллер, выполненный с возможностью обработки регулируемого пилот-сигнала, принятого через, по меньшей мере, одну собственную моду MIMO канала для первой линии связи для получения, по меньшей мере, одного собственного вектора, используемого для пространственной обработки и передачи данных, принятой через первую линию связи, и передачи данных, посланной через вторую линию связи;
пространственный процессор приема, выполненный с возможностью выполнения пространственной обработки на первой передаче данных, принятой через первую линию связи, с, по меньшей мере, одним собственным вектором; и
пространственный процессор передачи, выполненный с возможностью выполнения пространственной обработки для второй передачи данных с, по меньшей мере, одним собственным вектором до передачи по второй линии связи.
выполняют пространственную обработку на символах пилот-сигнала с нормализованным собственным вектором для одной собственной моды MIMO канала для генерирования первого регулируемого пилот-сигнала для передачи через одну собственную моду MIMO канала, причем нормализованный собственный вектор содержит множество элементов, имеющих ту же самую величину; и
выполняют пространственную обработку на символах данных с нормализованным собственным вектором до передачи на одной собственной моде MIMO канала.
выполняют пространственную обработку на символах пилот-сигнала с ненормализованным собственным вектором для одной собственной моды для генерирования второго регулируемого пилот-сигнала для передачи через одну собственную моду MIMO канала.
обрабатывают сигнал первой передачи, принятый через первую линию связи для получения матрицы собственных векторов для каждого множества поддиапазонов, причем множество матриц собственных векторов получают для множества поддиапазонов и используют для пространственной обработки и для передачи данных, принятых через первую линию связи и передачи данных, посланных через вторую линию связи; и
выполняют пространственную обработку для сигнала второй передачи с множеством матриц собственных векторов до передачи по второй линии связи.
упорядочивают собственные векторы в каждой матрице на основании коэффициентов передачи канала, связанных с собственными векторами.
обрабатывают передачу пилот-сигнала, принятого через первую линию связи, для получения оценки ответа канала для первой линии связи; и
осуществляют разложение оценки ответа канала для получения матрицы собственных векторов, используемой для пространственной обработки и для передачи данных, принятой через первую линию связи и для передачи данных, посланной через вторую линию связи.
принимают регулируемый пилот-сигнал на, по меньшей мере, одной собственной моде MIMO канала для первой линии связи; и
обрабатывают принятый регулируемый пилот-сигнал для получения, по меньшей мере, одного собственного вектора, используемого для пространственной обработки и для передачи данных, принятой через первую линию связи и для передачи данных, посланной через вторую линию связи.
демодулируют принятый регулируемый пилот-сигнал для удаления модуляции от символов пилот-сигнала, используемых для генерирования регулируемого пилот-сигнала, и
обрабатывают демодулированный регулируемый пилот-сигнал для получения, по меньшей мере, одного собственного вектора.
калибруют одну или несколько линий связи, включая первую линию связи и вторую линию связи, между точкой доступа и терминалом пользователя для формирования калиброванной первой линии связи и калиброванной второй линии связи;
получают оценку ответа канала для калиброванной первой линии связи на основании одного или нескольких пилот-сигналов, переданных на калиброванной первой линии связи; и
осуществляют разложение оценки ответа канала для получения одного или нескольких собственных векторов, используемых для пространственной обработки одной или нескольких линий связи.
применяют один или несколько наборов поправочных коэффициентов к первой и второй линиям связи, для формирования калиброванных первой и второй линий связи.
выполняют пространственную обработку для передач данных на первой и второй линиях связи, используя один или несколько собственных векторов, полученных от разложения оценки ответа канала для калиброванной первой линии связи.
передают регулируемый опорный сигнал на второй линии связи, используя один или несколько собственных векторов.
выполняют пространственную обработку одного или нескольких символов пилот-сигнала с одним или несколькими собственными векторами для генерирования регулируемого опорного сигнала.
средство для калибровки одной или нескольких линий связи, включая первую линию связи и вторую линию связи, между точкой доступа и терминалом пользователя для формирования калиброванной первой линии связи и калиброванной второй линии связи;
средство для получения оценки ответа канала для калиброванной первой линии связи на основании одного или нескольких пилот-сигналов, переданных на калиброванной первой линии связи; и
средство для разложения оценки ответа канала для получения одного или нескольких собственных векторов, используемых для пространственной обработки одной или нескольких линий связи.
средство для применения одного или нескольких наборов поправочных коэффициентов к первой и второй линиям связи для формирования калиброванных первой и второй линий связи.
средство для выполнения пространственной обработки для передач данных на первой и второй линиях связи с использованием одного или нескольких собственных векторов, полученных от разложения оценки ответа канала для калиброванной первой линии связи.
средство для передачи регулируемого опорного сигнала по второй линии связи с использованием одного или нескольких собственных векторов.
средство для выполнения пространственной обработки одного или нескольких символов пилот-сигнала с одним или несколькими собственными векторами для генерирования регулируемого опорного сигнала.
| СПОСОБ РАЗРАБОТКИ МОЩНЫХ КРУТЫХ УГОЛЬНЫХ ПЛАСТОВ | 1994 |
|
RU2078211C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВЗВЕШИВАНИЯ СИГНАЛОВ НА ТРАКТЕ РАДИОПЕРЕДАЧИ (ВАРИАНТЫ) | 1997 |
|
RU2141168C1 |
| US 6452981 B1, 17.09.2002 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАМЕРА ИЗНОСА ГУСЕНИЧНОГОПОЛОТНА | 0 |
|
SU176110A1 |

