Изобретение относится к конвейеростроению, а именно к скребковым конвейерам, одноцепным, двухцепным и трехцепным, используемым в горной промышленности в качестве забойных, а также в других отраслях промышленности при транспортировании насыпных грузов различной крупности.
Известен принятый за прототип скребковый конвейер, содержащий замкнутый на приводной и концевой звездочках скребково-цепной тяговый контур, два приводных блока, состоящих из двигателя, соединительной муфты и редуктора, кинематически связанных с приводной звездочкой, неподвижную раму для крепления приводных блоков и приводной звездочки.
Однако недостатком известного конвейера являются динамические нагрузки на скребково-цепной тяговый контур, вызванные переменным передаточным отношением в паре цепь-приводная звездочка за счет уменьшающегося радиуса зацепления при проходе звеньев цепей тягового органа между смежными зубьями звездочки. За счет этого окружная скорость и соответственно линейная скорость и ускорение тягового контура циклически изменяются по синусоидальному закону. Это вызывает продольные колебания тягового контура с ускорениями переменного знака и динамические нагрузки на зубья звездочки и звенья цепного тягового контура. Результатом является интенсивный износ приводной звездочки и цепей тягового органа. Кроме того, при увеличенной длине конвейера это может привести к возникновению резонансных колебаний скребково-цепного тягового органа и его разрыву.
Техническим результатом изобретения является снижение динамических нагрузок на скребково-цепной тяговый контур и приводную звездочку.
Технический результат достигается тем, что в скребковом конвейере, содержащем замкнутый на приводной и концевой звездочках скребково-цепной тяговый контур, два состоящих из двигателя, соединительной муфты и редуктора приводных блока, кинематически связанные с приводной звездочкой, неподвижную раму для приводных блоков и приводной звездочки, приводные блоки и приводная звездочка установлены на дополнительной раме с возможностью ее смещения параллельно продольной оси конвейера относительно направляющих неподвижной рамы, а дополнительная рама подпружинена спиральными пружинами сжатия к упору неподвижной рамы со стороны концевой звездочки конвейера, с возможностью смещения упора и его фиксации, а с противоположной стороны дополнительная рама ограничена закрепленным на неподвижной раме ограничителем, при этом суммарное рабочее усилие пружин сжатия определяется по формуле
P=T-gG(wcosβ±sinβ),
где P - суммарное рабочее усилие пружин сжатия, H, T - максимальное натяжение тягового контура при взаимодействии звеньев его цепей с зубьями приводной звездочки, H, g - ускорение свободного падения, м/с2, G - суммарная масса приводных блоков, приводной звездочки и дополнительной рамы, H, w - коэффициент сопротивления перемещению дополнительной рамы относительно неподвижной рамы, P - угол наклона конвейера в зоне размещения его привода, град., при этом знак «+» принимают при уклоне конвейера в сторону транспортирования груза, знак «-» - на его подъем, а рабочий ход пружин сжатия определяется по формуле
l=R(1-cosα/2),
где l - рабочий ход пружин сжатия при изменении натяжения T от минимального до максимального значений в пределах одного цикла зацепления, м, R - радиус зацепления зубьев приводной звездочки, м, a α - центральный угол между смежными зубьями приводной звездочки, град. Дополнительная рама может быть снабжена катковыми опорами или опорами скольжения.
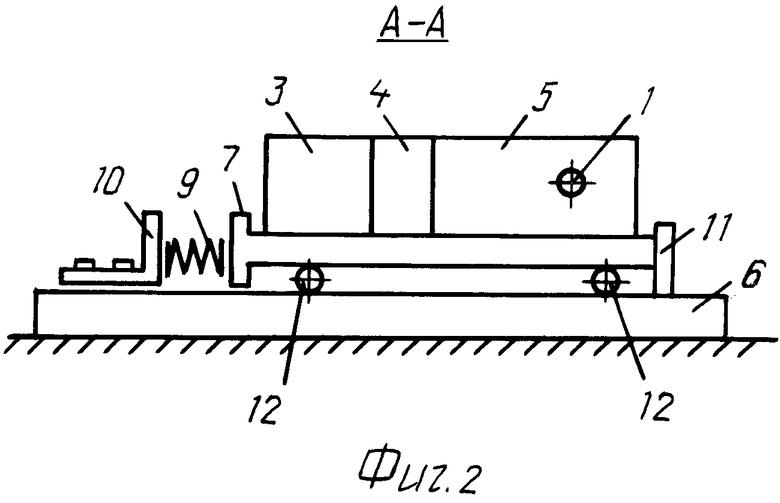
Скребковый конвейер представлен на фиг.1 - вид сверху на привод конвейера, на фиг.2 - разрез А-А по фиг.1.
Скребковый конвейер содержит замкнутый на приводной 1 и концевой (не показана) звездочках скребково-цепной тяговый контур 2, два состоящих из двигателя 3, соединительной муфты 4 и редуктора 5 приводных блока, кинематически связанные с приводной звездочкой 1, неподвижную раму 6 для приводных блоков и приводной звездочки 1. Приводные блоки, состоящие из элементов 3, 4 и 5, и приводная звездочка 1 установлены на дополнительной раме 7 с возможностью ее смещения параллельно продольной оси 8 конвейера относительно направляющих неподвижной рамы 6. Дополнительная рама 7 подпружинена спиральными пружинами сжатия 9 к упору 10 неподвижной рамы 6 со стороны концевой звездочки конвейера. Упор 10 установлен на неподвижной раме 6 с возможностью смещения упора 10 вдоль продольной оси 8 конвейера и его фиксации. С противоположной стороны дополнительная рама 7 ограничена закрепленным на неподвижной раме 6 ограничителем 11. Суммарное рабочее усилие пружин сжатия 9 определяется по формуле
P=T-gG(wcosβ±sinβ),
где P - суммарное рабочее усилие пружин сжатия 9, H, T - максимальное натяжение тягового контура 2 при взаимодействии звеньев его цепей с зубьями приводной звездочки 1, H, g - ускорение свободного падения, м/с2, G - суммарная масса приводных блоков, приводной звездочки 1 и дополнительной рамы 7, H, w - коэффициент сопротивления перемещению дополнительной рамы 7 относительно неподвижной рамы 6, β - угол наклона конвейера в зоне размещения его привода, град. При этом знак «+» принимают при уклоне конвейера в сторону транспортирования груза, знак «-» - на его подъем.
Рабочий ход пружин сжатия 9 определяется по формуле
l=R(1-cosα/2),
где l - рабочий ход пружин сжатия 9 при изменении натяжения T от минимального до максимального значений в пределах одного цикла зацепления, м, R - радиус зацепления зубьев приводной звездочки 1, м, α - центральный угол между смежными зубьями приводной звездочки, град. Дополнительная рама 7 может быть снабжена катковыми опорами 12 или опорами скольжения.
Скребковый конвейер действует следующим образом. При вращении приводной звездочки и набегании очередного звена одноцепного или звеньев многоцепного тягового контура 2 на зубья приводной звездочки 1 тяговому контуру 2 сообщается с соответствующим ускорением максимальная (в пределах цикла зацепления) скорость поступательного движения при увеличивающемся натяжении тягового контура. За счет увеличивающегося натяжения тягового контура 2 оба приводных блока вместе с приводной звездочкой 1 и дополнительной рамой 7, на которой они закреплены, смещаются в сторону концевой звездочки конвейера, преодолевая усилия спиральных пружин сжатия 9. Благодаря этому поступательная скорость тягового контура 2 соответственно уменьшается. Когда звенья цепей тягового контура 2 размещаются между смежными зубьями приводной звездочки 1, натяжение тягового контура 2 снижается до своего минимального значения. Поэтому звездочка 1 с приводными блоками и дополнительной рамой 7 под действием усилий спиральных пружин сжатия 9 возвращаются в исходное положение, а поступательная скорость тягового контура 2 соответственно увеличивается. В связи с этим при цикличном колебании окружной скорости, сообщаемой от приводной звездочки 1 тяговому контуру 2, за счет уменьшения его скорости при набегании звеньев на зубья приводной звездочки 1 и увеличения скорости тягового контура 2 при проходе его звеньев между смежными зубьями приводной звездочки происходит выравнивание поступательной скорости движения тягового контура 2 и практически устранение его колебаний. При этом первоначальные параметры, характеризующие положение дополнительной рамы 7 с приводными блоками и приводной звездочкой 1 и рабочие усилия пружин сжатия 9, регулируются при монтаже привода конвейера в соответствии с его характеристиками с помощью закрепления упора 10 в требуемом положении на неподвижной раме 6 конвейера. Опирание дополнительной рамы 7 с использованием опор скольжения упрощает конструкцию привода конвейера, а применение катковых опор 12 повышает долговечность дополнительной рамы 7.
Отличительные признаки изобретения существенно уменьшают циклические колебания скребково-цепного тягового контура и обеспечивают соответствующее снижение динамических нагрузок на скребково-цепной тяговый контур и приводную звездочку.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК НАТЯЖЕНИЯ ЦЕПИ (ВАРИАНТЫ), ЦЕПНОЙ КОНВЕЙЕР, СЕНСОРНЫЙ БЛОК ДЛЯ ОБНАРУЖЕНИЯ ПОЛОМКИ ЦЕПИ, СПОСОБ ОПРЕДЕЛЕНИЯ НАТЯЖЕНИЯ ЦЕПИ В ЦЕПНОМ КОНВЕЙЕРЕ И ПРУЖИННЫЙ УЗЕЛ ДЛЯ СЕНСОРНОГО БЛОКА | 2012 |
|
RU2533953C2 |
| Способ монтажа тяговой круглозвенной цепи скребкового конвейера (его варианты) | 1983 |
|
SU1113327A1 |
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 2011 |
|
RU2473811C1 |
| ЗАБОЙНЫЙ СКРЕБКОВЫЙ КОНВЕЙЕР | 2010 |
|
RU2466076C2 |
| Привод скребкового конвейера | 1991 |
|
SU1808789A1 |
| Промежуточный привод скребкового конвейера | 1981 |
|
SU1006315A1 |
| Стенд для испытания скребкового конвейера | 1990 |
|
SU1720953A1 |
| Натяжное устройство скребкового конвейера | 1990 |
|
SU1728093A1 |
| Ленточно-цепной конвейер | 1983 |
|
SU1102722A1 |
| Блок приводных звездочек для конвейера с цепным тяговым органом | 1980 |
|
SU967897A1 |
Скребковый конвейер содержит замкнутый на приводной (1) и концевой звездочках скребково-цепной тяговый контур (2), два приводных блока и неподвижную раму (6). Приводные блоки и приводная звездочка установлены на дополнительной раме (7) с возможностью ее смещения параллельно продольной оси (8) конвейера относительно направляющих неподвижной рамы. Дополнительная рама подпружинена спиральными пружинами сжатия (9) к упору (10) неподвижной рамы со стороны концевой звездочки конвейера. Упор имеет возможность смещения вдоль продольной оси конвейера и фиксации. С противоположной стороны дополнительная рама ограничена закрепленным на неподвижной раме ограничителем (11). Суммарное рабочее усилие пружин сжатия и их рабочий ход определяется по соответствующим формулам. Сокращаются циклические колебания скребково-цепного тягового контура конвейера и обеспечивается соответствующее снижение динамических нагрузок на скребково-цепной тяговый контур и приводную звездочку. 2 з.п. ф-лы, 2 ил.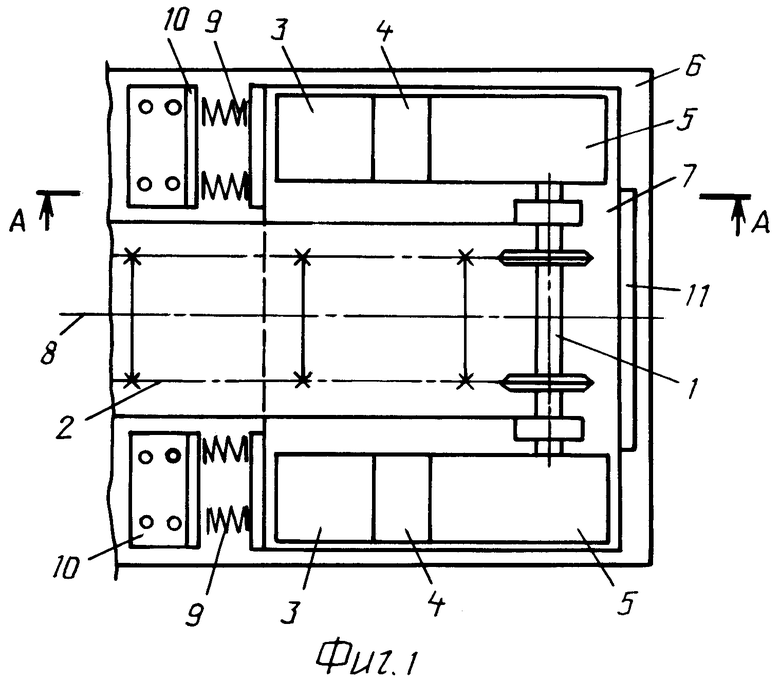
1. Скребковый конвейер, содержащий замкнутый на приводной и концевой звездочках скребково-цепной тяговый контур, два состоящих из двигателя, соединительной муфты и редуктора приводных блока, кинематически связанные с приводной звездочкой, неподвижную раму для приводных блоков и приводной звездочки, отличающийся тем, что приводные блоки и приводная звездочка установлены на дополнительной раме с возможностью ее смещения параллельно продольной оси конвейера относительно направляющих неподвижной рамы, а дополнительная рама подпружинена спиральными пружинами сжатия к упору неподвижной рамы со стороны концевой звездочки конвейера, с возможностью смещения упора и его фиксации, а с противоположной стороны дополнительная рама ограничена закрепленным на неподвижной раме ограничителем, при этом суммарное рабочее усилие пружин сжатия определяется по формуле
P=T-gG(wcosβ±sinβ),
где Р - суммарное рабочее усилие пружин сжатия, Н, Т - максимальное натяжение тягового контура при взаимодействии звеньев его цепей с зубьями приводной звездочки, Н, g - ускорение свободного падения, м/с2, G - суммарная масса приводных блоков, приводной звездочки и дополнительной рамы, Н, w - коэффициент сопротивления перемещению дополнительной рамы относительно неподвижной рамы, β - угол наклона конвейера в зоне размещения его привода, град., при этом знак «+» принимают при уклоне конвейера в сторону транспортирования груза, знак «-» - на его подъем, а рабочий ход пружин сжатия определяется по формуле
l=R(1-cosα/2),
где l - рабочий ход пружин сжатия при изменении натяжения Т от минимального до максимального значений в пределах одного цикла зацепления, м, R - радиус зацепления зубьев приводной звездочки, м, α - центральный угол между смежными зубьями приводной звездочки, град.
2. Конвейер по п.1, отличающийся тем, что дополнительная рама снабжена катковыми опорами.
3. Конвейер по п.1, отличающийся тем, что дополнительная рама снабжена опорами скольжения.
| ЗАБОЙНЫЙ СКРЕБКОВЫЙ КОНВЕЙЕР | 1990 |
|
RU2042593C1 |
| JP 2008094601 A, 24.08.2008 | |||
| CN 2908438 Y, 06.06.2007. | |||

