Изобретение относится к способу и устройству для возбуждения волн в стержнях с целью калибровки датчиков ускорения и датчиков силы, в частности, с большими амплитудами. Датчик, подобный этому, представляет собой электромеханический преобразователь, который преобразует механическое переменное ускорение или силу в электрически измеряемый сигнал, например заряд или напряжение. Калибровка должна осуществляться для определения функции преобразования датчика.
Известны различные устройства для калибровки датчиков ускорения. Устройства и способы калибровки датчиков вибрации и ударов описаны в стандарте ИСО 16063. Для калибровки с амплитудами ускорения >1000 м/с2 необходимо использовать сигналы в виде ударов, то есть сигналы, ограниченные во времени. Общеизвестный принцип молота и наковальни, основанный на двух твердых телах, ударяющихся друг о друга, удовлетворителен до амплитуд ускорения 5000 м/с2. Чтобы создать более высокие ускорения для высококачественных калибровок, необходимо использовать принцип стержня Гопкинсона. Описываемый способ калибровки объяснен в стандарте ИСО 16063-13. Для калибровки датчиков силы обычно используются статические способы. Это означает, что датчик нагружается силой от статического груза. Калибровка датчиков силы посредством сигналов, изменяющихся во времени и создаваемых стержнем Гопкинсона, представляет собой новизну.
В принципе, известны три разных способа калибровки посредством стержня Гопкинсона. Эти способы отличаются используемыми системами эталонных датчиков.
Ускорение на конце стержня можно измерить с помощью оптической измерительной системы (например, с помощью лазерного виброметра) или эталонного датчика ускорения или датчика силы. Еще один способ калибровки заключается в измерении деформации на стержне посредством датчиков деформации (тензометров). По деформации стержня можно рассчитать ускорение конца стержня.
Принцип стержня Гопкинсона основан на распространении механической волны в длинном тонком стержне. Отражение этой волны на свободной конце стержня приводит в результате к перемещению, которое создает ускорение или силу, требуемое или требуемую для калибровки датчиков. В зависимости от характеристик длинного тонкого стержня эти ускорения и силы могут достигать очень высоких амплитуд (>1000000 м/с2 и >100000 H соответственно).
В случае традиционного стержня Гопкинсона твердое тело, например стальной шарик, выстреливали в один конец стержня, создавая удар механической силы. Эта сила удара вызывает продольную волну в стержне, которая может распространяться по стержню. Профиль изменения деформации во времени, а также ускорения и силы во времени на конце стержня определяются профилем изменения силы во времени для удара силы в начале стержня. Например, большие стальные шары возбуждают очень узкий частотный спектр. С уменьшением диаметра шара частотные спектры расширяются. Однако с увеличением диаметра шара максимальные амплитуды возрастают весьма значительно.
Основные недостатки традиционного стержня Гопкинсона:
- невозможно повлиять на форму сигналов ускорения;
- длительность импульса ускорения предопределяется партнером по удару, и поэтому повлиять на нее можно лишь с трудом;
- воспроизводимость сигналов ускорения и, следовательно, результат калибровки ограничиваются износом партнеров по удару;
- ограниченный диапазон более низких амплитуд примерно от >5000 м/с2.
В патенте США 5000030 A описываются способ и устройство для измерения динамических характеристик ударного акселерометра. Система эталонного датчика расположена на стержне Гопкинсона, а калибруемый датчик расположен на его конце. Механический удар также может возбуждаться inter alia (среди прочего - лат.) посредством пьезоэлектрического элемента. Намеренное влияние на форму сигналов, амплитуду сигналов или длительность импульса сигналов отсутствует.
Испытательная система для калибровки датчиков ускорения описана в документе US 3830091 A. В этой системе электромеханические исполнительные механизмы, установленные на алюминиевом стержне сбоку, создают резонансные колебания в стержне посредством разомкнутых и замкнутых электронных схем, а датчик ускорения, подлежащий испытанию, а также эталонный датчик ускорения установлены на одном конце стержня. В этой испытательной системе могут создаваться гармонические ускорения. Однако частоты ускорения могут задаваться лишь с целочисленными кратными собственной частоты (например, 1 кГц, 2 кГц, 3 кГц …). Достижимая амплитуда ускорения составляет лишь примерно 3000 м/с2.
Целью настоящего изобретения является разработка способа и устройства калибровки датчиков ускорения и силы с помощью стержня Гопкинсона, которые позволяют намеренно влиять на форму сигналов, амплитуду сигналов и длительность импульса сигналов в широком диапазоне амплитуд. Устройство должно иметь простую конструкцию и должно действовать надежно, безопасно и с малым обслуживанием.
В соответствии с изобретением эта цель достигается способом с отличительными признаками по п.1 формулы изобретения и устройством с отличительными признаками по п.3 формулы изобретения. Уточняющие отличительные признаки описаны в зависимых пунктах 2, 4 и 5 формулы изобретения.
В предлагаемом устройстве для калибровки датчиков ускорения и силы используется система эталонного датчика, которая обычно формируется на стержне Гопкинсона. Система эталонного датчика может быть оптической измерительной системой (например, лазерным виброметром) или эталонным датчиком. Еще одним способом калибровки является измерение деформации на стержне посредством датчиков деформации. По деформации стержня можно рассчитать ускорение или силу на конце стержня.
Одним обычно используемым стержнем Гопкинсона является металлический стержень длиной примерно 2-4 м и толщиной примерно 18-30 мм.
Калибруемый датчик прикрепляют к концу стержня Гопкинсона. Для возбуждения импульса ускорения или силы используют электромеханический исполнительный механизм, прикрепленный к противоположному концу стержня Гопкинсона.
К электромеханическому исполнительному механизму, прикрепленному к противоположному концу стержня Гопкинсона, крепят противовес, который должен быть намного короче длины стержня и должен иметь массу более 1/100 массы стержня. Этот противовес выполняет функцию введения усилия исполнительного механизма в стержень.
Электромеханический исполнительный механизм подсоединен по линии управления к разомкнутым и замкнутым электронным схемам управления.
Электромеханический исполнительный механизм предпочтительно будет представлять собой пьезоэлектрический исполнительный механизм или еще магнитострикционный исполнительный механизм. Магнитострикционный исполнительный механизм можно очень легко подсоединять к стержню, но он значительно менее эффективный, чем пьезоэлектрический исполнительный механизм.
Линия управления может проходить от системы эталонного датчика к разомкнутым и замкнутым электронным схемам управления.
Это устройство можно использовать для калибровки датчиков силы или ускорения. Для того чтобы откалибровать датчики ускорения, датчик должен быть установлен на свободном конце стержня. Для того чтобы откалибровать датчики силы, датчик должен быть установлен вместе с соединяющей массой на свободном конце стержня.
Предлагаемое устройство действует следующим образом.
Описанные недостатки известных способов калибровки с помощью стержней Гопкинсона обусловлены тем фактом, что волна в стержне инициируется ударом механической силы. Настоящее изобретение основано на замене удара механической силы альтернативным способом возбуждения волн в стержне. Цель этого способа заключается в том, чтобы преобразовать электрический сигнал возбуждения в определенный силовой удар. Преобразователи этого типа могут обычно называться исполнительными механизмами. В частности, электромеханические исполнительные механизмы можно использовать для калибровки датчиков ускорения и силы посредством предлагаемого устройства, причем эти электромеханические исполнительные механизмы имеют широкий динамический диапазон (1 мН-5 кН) и широкий используемый частотный диаметр (>10 кГц).
Формой импульсов ускорения и силы можно управлять путем измерения соответствующей переменной в системе эталонного датчика. Измеренная переменная передается в замкнутые электронные схемы управления, и сигналы возбуждения электромеханического исполнительного механизма можно намеренно предварительно искажать.
Если стержень Гопкинсона приводится в резонансное состояние на его продольных собственных частотах и если мощность возбуждение постоянна, на конце стержня возникает максимальная амплитуда ускорения или силы. Это позволяет достигнуть больших амплитуд ускорения и силы особенно эффективным в части энергии путем.
Амплитуда ускорения или силы на конце стержня максимизируется при наложении волн. Амплитуда ускорения или силы увеличивается ступенями при повторной подаче энергии в виде возобновляемого возбуждения стержня Гопкинсона посредством электромеханического исполнительного механизма.
Изобретение позволяет устранить недостатки традиционного способа калибровки с помощью стержня Гопкинсона.
Преимущества изобретения заключаются в том, что на форму сигналов ускорения можно влиять электрически. На длительность импульса сигналов ускорения тоже можно влиять электрически. Изобретение позволяет влиять на форму сигналов (гармонические сигналы, импульсные сигналы), амплитуду сигналов (обычно 20-100000 м/с2) и длительность импульса (обычно 50-500 мкс) сигналов.
Износ практически отсутствует, что улучшает воспроизводимость сигналов ускорения и результата калибровки.
Кроме того, как преимущественные характеристики устройства для калибровки можно отметить возможность простой автоматизации операций калибровки и более эффективный в части энергии принцип действия по сравнению с обычным устройством для калибровки.
В последующем тексте изобретение будет описано подробнее со ссылками на два примерных варианта осуществления. На чертежах:
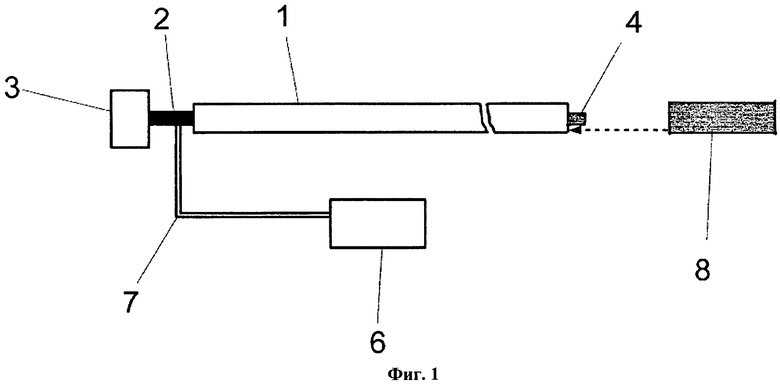
фиг.1 иллюстрирует устройство для калибровки с лазерным виброметром в качестве системы эталонного датчика,
фиг.2 иллюстрирует устройство для калибровки с датчиком силы в качестве системы эталонного датчика.
Фиг.1 иллюстрирует устройство для калибровки датчиков ускорения. Устройство содержит стержень Гопкинсона 1 в виде металлического цилиндрического стержня длиной 2 м и диаметром 20 мм. К стержню Гопкинсона 1 на левом начале стержня подсоединен пьезоэлектрический исполнительный механизм 2 с прессовой посадкой. К исполнительному механизму 2 приклеен цилиндрический металлический противовес 3 диаметром 50 мм и длиной 30 мм. Калибруемый датчик 4 установлен на правом конце стержня. Система эталонного датчика 8 выполнена в виде лазера. Разомкнутые и замкнутые электронные схемы управления (6) управляют пьезоэлектрическим исполнительным механизмом 2 по линии управления 7.
Фиг.2 иллюстрирует устройство для калибровки датчиков силы. Устройство содержит стержень Гопкинсона 1 обычно в виде металлического цилиндрического стержня длиной 2 м и диаметром 20 мм. К стержню Гопкинсона 1 на левом начале стержня подсоединен пьезоэлектрический исполнительный механизм 2 с прессовой посадкой. Цилиндрический металлический противовес 3 имеет диаметр 50 мм и длину 30 мм и приклеен, то есть присоединен как одно целое, к пьезоэлектрическому исполнительному механизму 2. Калибруемый датчик 4, эталонный датчик 8 и соединяющая масса 9 установлены на правом конце стержня. Разомкнутые и замкнутые электронные схемы управления 6 управляют пьезоэлектрическим исполнительным механизмом 2 по линии управления 7.
Сигналы из калибруемого датчика 4 и системы эталонного датчика 8 подаются в разомкнутые и замкнутые электронные схемы управления 6. Путем возбуждения пьезоэлектрического исполнительного механизма 2 определенными электрическими сигналами в стержне создаются определенные волны. Таким образом, за счет отражения волн на правом конце стержня можно получить определенные сигналы ускорение-время и сила-время.
На сигналы на правом конце стержня можно намеренно влиять путем изменения электрических сигналов возбуждения в пьезоэлектрическом исполнительном механизме 2. Таким образом, изобретение позволяет влиять на форму сигналов (гармонические сигналы, импульсные сигналы), амплитуду сигналов (обычно 20-100000 м/с2) и длительность импульса (обычно 50-500 мкс) сигналов.
Для того чтобы получить определенный номинальный сигнал на конце стержня, можно использовать фактические сигналы системы эталонного датчика, чтобы сравнить их с номинальным сигналом. Предыскажение сигналов возбуждения для исполнительного механизма можно рассчитать соответствующими математическими методами, чтобы на конце стержня получить номинальный сигнал. Это позволяет создавать калибровочные сигналы, согласующиеся с соответствующим калибруемым датчиком.
Для достижения сигналов с особенно большой амплитудой на правом конце стержня можно использовать континуальные характеристики стержня.
С одной стороны, стержень можно возбуждать гармоническими сигналами на продольной собственной частоте. Это позволяет добиться сигналов с особенно большой амплитудой на правом конце стержня при минимальном количестве введенной электрической энергии.
С другой стороны, исполнительный механизм можно возбуждать периодически одним и тем же сигналом. Если период возбуждения согласовать со временем распространения волны по стержню, первоначальная волна и соответственно вновь созданная волна накладываются. Это накладывание также позволяет добиться сигналов с особенно большой амплитудой на правом конце стержня при малой введенной электрической энергии.
Перечень позиций
1 Стержень
2 Электромеханический исполнительный механизм
3 Противовес
4 Калибруемый датчик
5 Линия управления
6 Разомкнутые и замкнутые электронные схемы управления
7 Линия управления
8 Система эталонного датчика
9 Соединяющая масса
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОАКУСТИЧЕСКИЙ ТВЕРДОМЕР | 1992 |
|
RU2042942C1 |
| ПИРОТЕХНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ТЕСТИРОВАНИЯ УДАРНЫХ АКСЕЛЕРОМЕТРОВ | 2023 |
|
RU2822975C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛАСТИЧЕСКИХ СВОЙСТВ КРОВЕНОСНЫХ СОСУДОВ | 2010 |
|
RU2451484C2 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКОВ ИМПУЛЬСНОГО ДАВЛЕНИЯ | 2011 |
|
RU2469284C1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| СПОСОБ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ПРЕОБРАЗОВАНИЯ ПЬЕЗОКЕРАМИЧЕСКИХ АКСЕЛЕРОМЕТРОВ | 2014 |
|
RU2553750C1 |
| ВОЗБУДИТЕЛЬ КОЛЕБАНИЙ С КОМПЕНСИРОВАНИЕМ НАГРУЗКИ | 2015 |
|
RU2649225C1 |
| СИСТЕМА КАЛИБРОВКИ УСТРОЙСТВА ИЗМЕРЕНИЯ И КОНТРОЛЯ ВИБРАЦИИ, УПРАВЛЯЕМОГО МИКРОПРОЦЕССОРОМ | 2006 |
|
RU2313773C1 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ АВТОМОБИЛЬНОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1988 |
|
RU2076049C1 |
Изобретение предназначено для калибровки датчиков ускорения и датчиков силы с помощью стержня Гопкинсона для управляемого влияния на форму сигналов, амплитуду сигналов и длительность импульсов сигналов в широком диапазоне амплитуд. Для калибровки датчиков ускорения и силы используется возбуждение волн в стержнях, в частности, с большими амплитудами. Эталонный датчик и датчик для калибровки размещают на стержне Гопкинсона. На конце стержня Гопкинсона, противоположном датчикам, выполняют возбуждение посредством электромеханического исполнительного механизма для преобразования электрического сигнала в механическую силу. Электромеханический исполнительный механизм может управляться электронной схемой управления и регулирования. Изобретение обеспечивает возможность целевого влияния на форму импульса ускорения и силы и ее изменение. 2 н. и 3 з.п. ф-лы, 2 ил.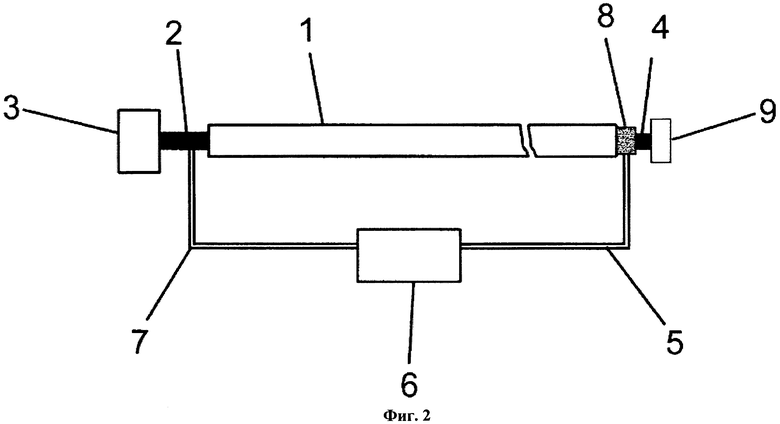
1. Способ калибровки датчиков ускорения и силы с помощью стержня Гопкинсона (1), в котором систему эталонного датчика (8), разработанную обычным путем, размещают на стержне Гопкинсона и датчик (4), который предстоит откалибровать, размещают на одном конце стержня Гопкинсона, конец стержня Гопкинсона, противоположный датчику, возбуждают посредством электромеханического исполнительного механизма, чтобы преобразовать электрический сигнал в механическую силу, причем электромеханический исполнительный механизм могут возбуждать посредством разомкнутых и замкнутых электронных схем управления, отличающийся тем, что разомкнутые электронные схемы управления используют и как замкнутые электронные схемы управления, и формой импульсов ускорения или силы управляют путем измерения соответствующей переменной посредством системы эталонного датчика, причем измеренную переменную передают в замкнутые и разомкнутые электронные схемы управления и сигналы возбуждения электромеханического исполнительного механизма намеренно предыскажают.
2. Способ по п.1, отличающийся тем, что амплитуду ускорения или силы на конце стержня Гопкинсона максимизируют путем наложения волн.
3. Устройство для осуществления способа по п.1, в котором система эталонного датчика (8), разработанная обычным путем, расположена на стержне Гопкинсона (1), и калибруемый датчик (4) расположен на конце стержня Гопкинсона (1), при этом электромеханический исполнительный механизм (2) установлен прикрепленным к одному концу стержня Гопкинсона (1), отличающееся тем, что электромеханический исполнительный механизм (2) подключен по линии управления (7) к разомкнутым и замкнутым электронным схемам управления (6), причем
- к стержню Гопкинсона (1) с противоположной от электромеханического исполнительного механизма (2) стороны прикреплен противовес (3), и
- причем от системы эталонного датчика (8) к разомкнутым и замкнутым электронным схемам управления (6) проходит линия управления (5).
4. Устройство по п.3, отличающееся тем, что электромеханический исполнительный механизм (2) представляет собой пьезоэлектрический исполнительный механизм.
5. Устройство по п.3, отличающееся тем, что электромеханический исполнительный механизм (2) представляет собой магнитострикционный исполнительный механизм.
| US 5000030 А, 19.03.1991 | |||
| US 7343776 В2, 18.03.2008 | |||
| US 3830091 А, 20.08.1974 | |||
| Устройство для испытаний акселерометров в ударном режиме | 1981 |
|
SU993131A1 |
| Устройство для ударных испытаний изделий | 1977 |
|
SU641297A1 |

