ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству и способу измерения физиологического параметра и, в частности, к устройству и способу, предназначенным для оптимизации расположения считывающей поверхности относительно воспринимающей поверхности ткани человека.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Измерение показателей жизнедеятельности принадлежит к вопросам первоочередной важности для контроля психического здоровья и выявления потенциальных заболеваний. Показатели жизнедеятельности являются количественными оценками основных функций человеческого организма. В дополнение к температуре тела и частоте дыхания (частота дыхательных движений), возможно, наиболее важными из показателей жизнедеятельности, которые как правило контролируются медицинскими работниками, являются частота пульса и кровяное давление. Они могут измеряться в медицинских учреждениях, дома, на месте чрезвычайной ситуации или в другом месте. Поэтому очень важно иметь возможность измерить их надежно и точно независимо от настроек и обстоятельств.
В дополнение к показателям жизнедеятельности, в профессиональной медицинской практике с целью получения более подробной информации об организме человека и его функционировании часто требуются другие более сложные физиологические параметры организма, такие как, например, ЭЭГ (электроэнцефалография), связанная с мозгом, ЭКГ (электрокардиограмма), связанная с сердцем, и SPO2 (насыщенность периферийным кислородом).
Существует ряд средств для получения количественной оценки этих различных показателей жизнедеятельности и физиологических параметров. Обычно их выводят из измерений, выполненных в одной или нескольких областей знаний из следующих: электричество, оптика/визуализация, механика или акустика. Часто принципы измерений можно объединить для повышения точности и качества получаемого результата. Выполнение этих измерений достигается с помощью ряда различных специально предназначенных для этих целей и часто специализированных датчиков или измерительных устройств.
Один из наиболее распространенных типов устройств использует метод фотоплетизмографии (ФПГ). Это электрооптическая техника для измерения кардиоваскулярной пульсовой волны, которая распространяется по всему телу. Ее вызывает периодическая пульсация в объеме артериальной крови, и ее измеряют посредством последовательного изменения оптического поглощения, которое она вызывает. Устройства для измерения фотоплетизмограммы (ФПГ) обычно состоят из источника света (обычно инфракрасного СИД), фотодиодного детектора для обнаружения отраженного или прошедшего света и системы восстановления/обработки/отображения сигналов. ФПГ является популярным методом, так как он позволяет измерять ряд показателей жизнедеятельности, используя одно устройство, в том числе частоту пульса, периферическую перфузию, объемный пульс артериальной крови, не пульсирующий объем артериальной крови и объем венозной и капиллярной крови или кровоток.
Другим очень распространенным подходом, реализованным в ряде устройств, является метод тонометрии. Тонометрия позволяет измерять артериальное давление и не требует применения оптического воздействия. Способ основан на приложении регулируемой силы перпендикулярно к стенке поверхностной артерии, прижимая ее к прилежащей кости. Это создает локальное сжатие артерии, и затем применяется датчик силы для измерения давления при контакте. Контакт поддерживается на протяжении всего сердечного цикла, и для достижения наилучших результатов приложенная (перекрывающая) сила должна изменяться одновременно с изменяющейся фазой волны пульсового артериального давления.
Фиг.1 иллюстрирует принцип артериальной аппланационной тонометрии, при котором артерия 12 моделируется цилиндрической тонкостенной трубкой. В положении измерения датчик 14 давления оказывает давление на артерию 12, частично сплющивая артерию. Давление (Pt) на стенку артерии равно разнице между внутренним давлением (Pi) артерии и внешним давлением (Pe), действующим на артерию (Pt=Pi - Pe). Согласно закону Лапласа, напряжение (T) стенки цилиндрической тонкостенной трубы определяется давлением (Pt) на стенку, толщиной (μ) стенки и радиусом (r) кривизны стенки:
 (1)
(1)
Поэтому давление на стенку может быть выражено:
 (2)
(2)
Когда датчик 14 давления оказывает давление на стенку артерии, артерия 12 частично сплющивается, и, следовательно, радиус кривизны стенки (r) артерии можно приближенно считать практически бесконечным. Как видно из уравнения (2), когда r стремится к бесконечности, Pt стремится к нулю, и, следовательно, внутреннее давление в артерии может быть приблизительно равно внешнему давлению, измеренному датчиком давления в случае, если артерия сплющена.
На Фигуре 1 показана артерия 12, сплющенная по направлению к кости 16. Артерия сплющена только частично; нет необходимости и не желательно полностью закрывать просвет артерии. При нахождении в этом частично сплющенном состоянии, внешнее давление, оказываемое на стенку артерии датчиком 14 давления, можно считать примерно равным внутреннему давлению артерии. Следовательно, можно считать, что выходные данные датчика 14 давления отражают кровяное давление субъекта.
В зависимости от подхода к измерению и измеряемого параметра, датчик физиологических параметров может быть установлен в ряде различных конфигураций по отношению к пользователю. В частности, положение установленного датчика физиологических параметров относительно субъекта может варьироваться в зависимости от измеряемого параметра, типа датчика физиологических параметров и/или обстоятельств, при которых происходит физиологическое зондирование. В некоторых случаях датчик физиологических параметров должен находиться в контакте с телом пользователя. В других случаях датчик физиологических параметров должен быть отделен от тела субъекта.
Существенной трудностью в отношении таких датчиков является обеспечение того, чтобы давление в месте контакта или расстояние между датчиком физиологических параметров и телом пользователя поддерживалось на постоянном уровне, поскольку на сигнал, полученный во время физиологического зондирования, влияет расположение датчика относительно пользователя. Так называемые «артефакты движения» могут создаваться, когда датчик перемещается относительно кожи, и это может привести к существенным неточностям в полученных результатах измерений.
Например, при наблюдении ФПГ для оптимальной стабильности сигнала датчика требуется постоянное расстояние между светочувствительным датчиком и кожей. Для пэтчей ультразвукового преобразователя для получения высококачественных изображений необходим хороший контакт с кожей. Точно так же электроды устройств отслеживания ЭКГ чувствительны к давлению в месте контакта.
В случае тонометрии расположение тонометра над осью артерии также очень важно. Разница между правильным и неправильным размещением может быть порядка миллиметров. Если расположение датчика неправильное, то это может привести к нелинейности полученного измерения артериального давления. Тонометрия также очень чувствительна к движению, поэтому важно статичность расположения. Кроме того, давление, прикладываемое к стенке артерии в тонометрических способах, должно регулироваться очень точно, так как слишком малое может привести к неточным измерениям, а слишком большое может полностью закрыть артерию, что приведет к риску ишемии.
Следовательно, во многих случаях сенсорным устройствам будут полезны средства для надежного и точного предотвращения или устранения проблем, вызванных случайным движением. Предпочтительным средством было бы то, которое позволяло бы надежно и точно перенастроить положение датчика относительно кожи в режиме реального времени, чтобы обеспечить компенсацию потенциальных артефактов движения.
Было предложено включить в состав сенсорного устройства один или несколько мехатронных исполнительных механизмов, чтобы обеспечить компенсацию случайного движения. Такие подходы также дают преимущество, заключающееся в том, что на кожу или датчик воздействуют определенные стимулирующие давления или силы, чтобы помочь или улучшить сам процесс измерения. Определенные давления можно приложить к точкам на теле, чтобы стимулировать определенное взаимодействие или реакцию, которые затем могут быть восприняты, либо для обеспечения прямого измерения некоторого физиологического параметра, либо для обеспечения косвенного измерения параметра. Например, в случае тонометрии, включение в состав исполнительных механизмов позволяет выполнить первоначальное сплющивание артерии посредством мехатроники, а не вручную.
Кроме того, в любом случае, когда необходимо измерять электрические, оптические/визуальные или механические сигналы (например, в случае кровяного давления, сердцебиения или SpO2), сила и расположение, при которых чувствительные элементы прикладываются к коже, должны во многих случаях выполняться с большой точностью, чтобы избежать ошибочных результатов.
В US 2008/0033275 раскрывается использование электромеханических исполнительных механизмов для обеспечения возможности изменения расположения модуля датчика относительно объекта. Хотя такой подход обеспечивает некоторое преимущество с точки зрения компенсации артефактов движения, он имеет ряд существенных недостатков. В частности, электроактивные исполнительные механизмы обычно предлагают ограниченную точность в степени управления их перемещением и расположением, поскольку у них, как правило, отсутствуют какие-либо средства для обеспечения внутренней обратной связи в отношении степени их воздействия. Другая трудность, особенно для применений в тонометрии, заключается в том, что положение электромеханического привода и датчика давления (14 на Фигуре 1) не идентичны и не совпадают; оба смещены в сторону друг от друга. В результате точность измерения артериального давления Pi может быть нарушена, или сплющивание артерии может быть не полностью равномерным. Электромеханические решения также являются неудовлетворительными, как правило, из-за большого форм-фактора, повышенных уровней шума и высокого энергопотребления.
Было предложено включить в состав физиологических сенсорных устройств исполнительные механизмы на основе электроактивного полимера, чтобы обеспечить возможность манипулирования одним или несколькими измерительными компонентами на теле субъекта. Однако, хотя известные подходы предлагают ряд улучшений (включающих в себя форм-фактор, шум, энергопотребление, надежность и скорость отклика), они все еще сохраняют ту же проблему, не предлагая никакой возможности для внутренней обратной связи, чтобы обеспечить точное расположение и степень воздействия исполнительного механизма, которые были бы известны, в режиме реального времени. Кроме того, устройства, содержащие такие исполнительные механизмы, все еще требуют наличия отдельных специализированных датчиков силы или давления, чтобы обеспечить возможность определения любых механических физиологических параметров (таких как кровяное давление) и/или обеспечить обратную связь в отношении положения исполнительного механизма или степени воздействия. Смещенные исполнительные и чувствительные элементы снова ограничивают точность устройства, особенно в случае тонометрии, где очень важны точность расположения и приложенного давления. Смещенный датчик может негативно влиять на это и снизить эффективность компенсации артефактов движения.
Поэтому существует необходимость в считывающем устройстве, способном регулировать расположение физиологического датчика или прикладываемого им давления на поверхности ткани человека, по меньшей мере, для компенсации артефактов движения с улучшенной точностью.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение определяется формулой изобретения.
В соответствии с примерами в соответствии с одним из аспектов изобретения предложено физиологическое сенсорное устройство для измерения, по меньшей мере, одного физиологического параметра, выполненное с возможностью управления расположением считывающей поверхности относительно воспринимающей поверхности ткани человека, содержащее:
указанную считывающую поверхность;
электроактивную полимерную структуру, выполненную с возможностью деформации в ответ на подачу электрического сигнала, чтобы тем самым управлять расположением считывающей поверхности; и
контроллер, выполненный с возможностью:
предоставления (или подачи) сигнала, такого как электрический сигнал, составленного из сигнала наложенного воздействия и считывающего сигнала переменного тока на электроактивную полимерную структуру, причем сигнал воздействия предназначен для стимулирования деформации структуры, чтобы тем самым управлять считывающей поверхностью для приложения силы воздействия к воспринимающей поверхности, а считывающий сигнал переменного тока предназначен для обеспечения измерения давления и имеет гармоники частоты переменного тока либо с резонансной, либо с антирезонансной частотой электроактивной полимерной структуры;
контроля импеданса, проявляемого электроактивной полимерной структурой, по времени, чтобы тем самым обеспечить индикацию возвратной силы, действующей на электроактивную полимерную структуру со стороны воспринимающей поверхности по времени, и
регулирования величины приложенного сигнала воздействия в зависимости от измеренного импеданса и/или возвратной силы, чтобы тем самым регулировать расположение считывающей поверхности относительно воспринимающей поверхности.
Изобретение основано на использовании электроактивных полимерных (ЭАП) структур для достижения одновременного воздействия и считывания. Это позволяет получать сигнал обратной связи в реальном времени о степени воздействия структуры, который затем может использоваться для регулировки сигнала воздействия, подаваемого в структуру. Так как воздействие и считывание происходят одновременно и пространственно перекрываются, достигается более точное управление приложением давления и регулировкой положения.
Электроактивные полимеры (ЭАП) представляют собой новый класс материалов в области электрочувствительных материалов. ЭАП могут работать как датчики или исполнительные механизмы и их можно легко изготовить в различных формах, что позволяет легко интегрировать их в большое разнообразие систем. Преимущества ЭАП включают в себя низкое энергопотребление, малый форм-фактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, малое время отклика и цикличность воздействия.
На применение небольшой силы к определенным классам ЭАП генерируется в ответ электрический сигнал, что позволяет использовать единую ЭАП структуру как для воздействие, так и для обнаружения. Однако современные исполнительные механизмы/датчики на основе ЭАП обычно предоставляют функции считывания и воздействия, которые отделены друг от друга, либо физически, - когда другая область или часть устройства используется для считывания, как и в случае воздействия, например, с отдельно предусмотренным электрическим соединением с каждым - либо во времени, при этом одно устройство последовательно поочередно переходит между функцией считывания и функцией воздействия.
Посредством наложения высокочастотного сигнала считывания с низкой амплитудой поверх первичного сигнала воздействия с более высокой амплитудой, функции считывания и воздействия могут выполняться одновременно. Амплитуда сигнала считывания может быть значительно меньше, чем амплитуда сигнала воздействия, например, <10% от сигнала воздействия, например, <1% от сигнала воздействия. Таким образом, деформационный отклик в электроактивной полимерной (ЭАП) структуре может быть незначительным для сигнала считывания по сравнению с тем, который стимулируется сигналом воздействия. Следовательно, точность, правильность и стабильность устройства как исполнительного механизма не нарушаются.
Сигнал воздействия является, например, сигналом постоянного тока (хотя с уровнем постоянного тока, который может варьироваться в зависимости от требуемого воздействия). Сигнал воздействия, однако, может быть сигналом переменного тока, но с частотой переменного тока, намного меньшей, чем частота сигнала считывания.
Когда считывание применяется на частоте, соответствующей механическому резонансу или антирезонансной частоте ЭАП структуры (или одной из их гармоник), в материале создается механическая стоячая волна, которая, в свою очередь, влияет на электрические характеристики материала. В частности, импеданс материала ниже для сигнала возбуждения, соответствующего резонансной частоте, из-за того, что механическая вибрация синфазна с электрическим сигналом возбуждения. И наоборот, импеданс материала выше для сигнала возбуждения, соответствующего антирезонансной частоте материала, из-за того, что механическая вибрация не совпадает по фазе с сигналом электрического возбуждения. В контексте настоящей заявки термин частота «гармоники» переменного тока включает в себя ряд положительных целых кратных основной частоты, в том числе основную частоту (резонансную или антирезонансную частоту электроактивной полимерной структуры). Следовательно, считывающий сигнал переменного тока для обеспечения измерения давления имеет частоту переменного тока, относящуюся к частотному диапазону, определяемому гармоникой резонансной или антирезонансной частоты: ряд положительных целых кратных основной частоты (в том числе саму основную частоту), являющейся либо резонансной или антирезонансной частотой.
Любое давление или другая механическая нагрузка, приложенная к устройству, может вызвать затухание в материале, вызывая смещение его резонансной или антирезонансной частоты (и гармоник) от их обычных незатухающих значений, тем самым вызывая различие между высокочастотным сигналом возбуждения и частотой механических колебаний. Это различие можно обнаружить в изменениях проявляемых значений импеданса в ЭАП структуре.
В случае, когда сигнал возбуждения подается на частоте, соответствующей (незатухающей) антирезонансной частоте, внезапное рассогласование, например, вызванное приложенной нагрузкой, может затем быть обнаружено как последующее падение импеданса, который измерен по всей ЭАП структуре. Альтернативно, в случае, когда сигнал возбуждения подается в соответствии с (незатухающей) резонансной частотой, рассогласование может быть обнаружено как последующий скачок импеданса, измеренного по всей ЭАП структуре. В любом случае высокочастотный сигнал, следовательно, позволяет измерять внешнее давление и нагрузку, приложенную к устройству, одновременно с воздействием.
Таким образом, отслеживание проявляемого импеданса позволяет получить индикацию возвратной силы, действующей на ЭАП структуру. Более конкретно, это может дать возможность получить индикацию величины приложенной силы. Это может быть, например, прямая или косвенная индикация. Отслеживание импеданса может таким образом предоставить меру приложенной возвратной силы, причем мера должна широко интерпретироваться как подразумевающая (прямое или косвенное) указание уровня или величины, или диапазона приложенной силы. Индикация силы может быть количественной индикацией или мерой в этом смысле. Количественная мера или индикация может быть, например, числовой мерой или может предоставлять более косвенную информацию, из которой может извлечь числовую индикацию силы.
Импеданс ЭАП структуры может отслеживаться в примерных вариантах осуществления посредством отслеживания напряжения и тока сигнала считывания во времени. Альтернативно, импеданс может отслеживаться путем отслеживания напряжения и тока сигнала воздействия высокой амплитуды. Опять же альтернативно, импеданс может отслеживаться посредством отдельной схемы контроля, имеющей отдельные выделенные измерительные электроды, которые со структурой и схемой анализа для определения импеданса.
В примерах числовая мера приложенного усилия, давления или нагрузки может быть получена посредством некоторого процесса предварительной калибровки, тем самым к исполнительному механизму прикладываются силы в диапазоне амплитуд, в диапазоне различных напряжений воздействия, и записываются соответствующие проявляемые значения импеданса. Эти значения импеданса можно затем использовать в качестве опорных во время работы, чтобы предоставить средство для соотнесения измеренных значений импеданса при данном напряжении воздействия с приложенным усилием или нагрузкой.
Измерение возвратной силы одновременно с воздействием позволяет получить относящийся к этому моменту воздействия сигнал обратной связи, или при взаимодействии между ЭАП структурой и воспринимающей поверхностью. Таким образом, достигается гораздо более точное управление расположением и перемещением исполнительного механизма, что позволяет с гораздо большей точностью регулировать расположения поверхности датчика относительно кожи (например, для коррекции артефактов движения). Одновременное воздействие и считывание также позволяет единой ЭАП структуре обеспечивать измерение нагрузки и воздействие в одном и том же месте, что обеспечивает повышение точности, особенно в случае применения тонометрии.
Контроллер выполнен с возможностью отслеживать проявляемые значения импеданса по времени и регулировать подаваемое напряжение воздействия (и, следовательно, силу, приложенную к воспринимающей поверхности ЭАП структурой) в зависимости от этих значений или от величины возвратной силы, указанной этими значениями. Таким образом, варианты осуществления изобретения реализуют интегрированную систему с обратной связью, посредством которой индуцированный уровень воздействия ЭАП структуры автоматически регулируется в зависимости от воспринятой контактной силы между считывающей поверхностью посредством воспринимающей поверхности ткани человека.
Контроллер может быть выполнен с возможностью обнаружения изменений контактной силы, прикладываемой воспринимающей поверхностью, и регулирования сигнала воздействия в зависимости от них.
Такие изменения обычно могут указывать на изменения расположения считывающей поверхности относительно воспринимающей поверхности, которые могут вызывать артефакты движения. Интегрированная система с обратной связью, предложенная в изобретении, может успешно автоматически компенсировать такое перемещение посредством автоматического регулирования в ответ сигнала воздействия.
В соответствии, по меньшей мере, с одним набором вариантов осуществления контроллер может быть выполнен с возможностью регулирования величины сигнала воздействия, чтобы поддерживать постоянной силу воздействия, прикладываемую к воспринимающей поверхности, и/или таким образом, чтобы поддерживать постоянной возвратную силу, или их компонент, прикладываемый к считывающей поверхности.
Это может обеспечить компенсацию артефактов движения, поскольку перемещение считывающей поверхности относительно воспринимающей поверхности обычно может приводить к изменению измеренной возвратной силы, действующей на воспринимающую поверхность. Регулирование для поддержания постоянной возвратной силы может обеспечить поддержание постоянство расположения.
Неизменная сила может подразумевать, например, силу, которая является постоянной, по существу постоянной, постоянной в пределах определенных допусков или параметров, или одинаковой или по существу одинаковой.
Как указано выше, сила может быть выведена из значений импеданса посредством процесса предварительной калибровки. Физическая модель или стандартный набор опорных значений можно использовать для получения значений приложенной силы из измеренных значений импеданса.
В альтернативных примерах напряжение воздействия можно отрегулировать в зависимости непосредственно от измеренных значений импеданса, причем значения импеданса представляют косвенную меру приложенной силы.
В соответствии с еще одним набором вариантов осуществления контроллер может быть выполнен с возможностью регулирования величины сигнала воздействия, чтобы поддерживать постоянным относительное расстояние между считывающей поверхностью и воспринимающей поверхностью и/или точкой или телом под воспринимающей поверхностью.
Точкой или телом под воспринимающей поверхностью может быть, например, вена, артерия, кость, мышца или какой-либо другой анатомический элемент структуры. Это может быть полезно в тех случаях, когда артериальное давление или частота пульса являются интересующими параметрами.
Контроллер может быть выполнен с возможностью уменьшения величины сигнала воздействия в ответ на падение или рост значений импеданса, и/или увеличения величины управляющего сигнала в ответ на рост или падение значений импеданса.
В случае, когда считывающий сигнал переменного тока имеет частоту, соответствующую антирезонансной частоте ЭАП структуры, сигнал воздействия может быть уменьшен в ответ на падение значений импеданса и/или увеличен в ответ на рост значений импеданса. Для сигнала переменного тока, подаваемого на антирезонансе, импеданс уменьшается, когда внешние силы, действующие на структуру, увеличиваются. Следовательно, уменьшение значений импеданса может указывать на то, что считывающая поверхность прикладывается к воспринимающей поверхности с большей силой (например, в результате случайного перемещения пользователем). Уменьшая в ответ уровень воздействия это изменение можно компенсировать, прикладывая считывающую поверхность к воспринимающей поверхности с уменьшенным усилием.
Для сигнала переменного тока при резонансе, отклики импеданса меняются местами, и, следовательно, в этом случае возрастающие значения импеданса могут указывать на то, что считывающая поверхность прикладывается к воспринимающей поверхности с большей силой и что, следовательно, напряжение воздействия должно уменьшаться в ответ.
Согласно еще одному набору примеров, контроллер может быть выполнен с возможностью уменьшения величины сигнала воздействия в ответ на падение значений импеданса ниже или рост выше определенного порогового значения, и/или увеличения величины сигнала воздействия в ответ на рост значений импеданса выше или падение ниже определенного порогового значения.
В любом варианте осуществления измеренная возвратная сила, прикладываемая воспринимающей поверхностью, в общем случае, может состоять из нескольких компонентов. Во-первых, он может содержать компонент силы реакции, представляющий силу, прикладываемую воспринимающей поверхностью в ответ на приложенную силу воздействия, возникающую в результате третьего закона Ньютона. Как правило, предполагается, что она будет иметь величину приблизительно равную и противоположную приложенной силе.
Во-вторых, может существовать физиологический компонент, представляющий силу или комбинацию сил, вызванную некоторым физиологическим действием, взаимодействием или явлением. В частности, измеренная возвратная сила может, например, включать в себя переменную или колебательную составляющую силы, вызванную кровяным давлением или пульсацией крови по вене или артерии под воспринимающей поверхностью. Это, в частности, имеет место в случае применений в тонометрии, в которых сила прикладывается непосредственно к артерии или вене, и где возвратная сила, прикладываемое воспринимающей поверхностью, обычно включает в себя компонент, вызванный кровотоком, проходящим через кровеносный сосуд, расположенный ниже.
Во многих случаях может быть желательно разделить эти два компонента, чтобы таким образом обеспечить измерение физиологического параметра отдельно от базовой силы реакции. Таким образом в соответствии, по меньшей мере, с подмножеством вариантов осуществления, сенсорное устройство может дополнительно содержать схему фильтра, выполненную с возможностью фильтрации полученных значений импеданса, чтобы извлекать компонент силы реакции, представляющий силы, оказываемые внутренней упругостью воспринимающей поверхности, и/или физиологический компонент, представляющий силы, возникающие в результате одного или нескольких физиологических явлений.
Схема фильтра, в частности, может включать в себя фильтр нижних частот для извлечения компонента силы реакции и/или фильтр верхних частот для извлечения физиологического компонента. Проявляемая сила реакции будет как правило примерно статической во времени и, следовательно, будет иметь низкую или близкую к нулю частоту. Фильтр нижних частот, следовательно, позволил бы извлечь этот компонент. Физиологический компонент может, по меньшей мере, в некоторых случаях, иметь колебательный или изменяющийся во времени характер. Это особенно касается кровяного давления или частоты пульса. Следовательно, фильтр верхних частот позволил бы извлечь этот компонент. Схема фильтра может включать в себя как фильтр верхних частот, так и фильтр нижних частот (соединенный параллельно), чтобы обеспечить возможность извлечения обоих компонентов.
Физиологический компонент в примерах может представлять силы, связанные с кровяным давлением и/или сердечно-сосудистой пульсовой волной.
В соответствии с примерами контроллер может быть выполнен с возможностью регулирования величины сигнала воздействия в зависимости либо от компонента силы реакции, либо от физиологического компонента измеренных значений импеданса.
Как указано выше, обычно можно ожидать, что составляющая силы реакции будет равной и противоположной по величине приложенной силе воздействия. Таким образом, компонент силы реакции может предоставить косвенную меру самой приложенной силы воздействия. Следовательно, это предоставляет средство для получения жесткой обратной связи относительно степени воздействия ЭАП структуры и ее расположения относительно воспринимающей поверхности.
Компонент силы реакции значений импеданса может содержать конкретный набор значений импеданса, исключая некоторые другие. Кроме того, контроллер может быть выполнен с возможностью регулирования величины сигнала воздействия в зависимости только от этого извлеченного набора значений импеданса. Поэтому вышеупомянутое указание на «растущие значения импеданса» или «падающие значения импеданса» должно пониматься в этом контексте как потенциально включающее случаи, когда рассматривается только извлеченный набор значений импеданса.
Сама ЭАП структура в некоторых случаях может быть выполнена с возможностью сбора измерений одного или нескольких физиологических параметров. Например, ее можно применять для измерения артериального давления и связанных с ним параметров в соответствии с тонометрическим способом. Поскольку в некоторых вариантах осуществления физиологические компоненты и компоненты силы реакции могут быть разделены, ЭАП структура может одновременно обеспечивать обратную связь для воздействия (с помощью компонента силы реакции) и измерение физиологических параметров, например, частоты пульса или кровяного давления (с помощью физиологического компонента). Это, как и воздействие, может быть достигнуто в то же время и в том же месте на воспринимающей поверхности.
Таким образом, в соответствии, по меньшей мере, с одним набором примеров считывающая поверхность может быть поверхностью самой ЭАП структуры, причем структура выполнена с возможностью прямого сбора измерений для определения физиологических параметров.
В альтернативном наборе примеров считывающая поверхность может быть поверхностью дополнительного вспомогательного считывающего компонента, скомпонованного в механическом взаимодействии с электроактивной полимерной структурой, и выполненного с возможностью измерения одного или нескольких физиологических параметров.
Это может быть, например, устройство на основе оптики, такое как устройство ФПГ. В примерах это может быть любое устройство или модуль для измерения или считывания одного или нескольких физиологических параметров, например датчик ЭЭГ (электроэнцефалография), ЭКГ (электрокардиограмма) и/или SPO2 (насыщенность периферийным кислородом). ЭАП структура может быть выполнена так, чтобы она могла работать с тем, чтобы управлять расположением этого дополнительного датчика относительно воспринимающей поверхности и/или изменять силу или давление, с которыми она прикладывается к воспринимающей поверхности.
В соответствии, по меньшей мере, с одним набором вариантов осуществления контроллер может быть выполнен с возможностью предоставления или подачи сигнала воздействия, который постоянно уменьшается по величине в течение определенного периода времени, и дополнительно выполнен с возможностью обработки измеренных значений импеданса в течение указанного периода времени для обнаружения и изменения колебательных изменений значения во времени, причем эти изменения указывают на колебания стенок кровеносных сосудов, вызванных кровяным давлением.
Сенсорное устройство в примерах может содержать массив электроактивных полимерных структур, каждая из которых независимо управляется контроллером для манипулирования соответствующей считывающей поверхностью, прикладывать силу в соответствующей точке на воспринимающей поверхности и измерять силу возврата, действующую на воспринимающую поверхность в указанной точке.
Согласно одному или нескольким вариантам осуществления, электроактивная полимерная структура/ы и/или контроллер могут быть установлены на гибком носителе для приложения к области воспринимающей поверхности. Гибкий носитель может давать возможность надежно прижимать, прикладывать или приклеивать устройство к воспринимающей поверхности. Например, она может составлять часть носимого устройства, в котором сенсорное устройство может быть закреплено или зафиксировано на части кожи субъекта. Носимое устройство может дополнительно предотвратить непреднамеренное перемещение устройства во время работы, или может помочь в предоставлении твердой опорной (поддерживающей) поверхности, к которой могут прилагаться силы воздействия.
В одном или нескольких вариантах осуществления сенсорное устройство может дополнительно содержать слой пьезоэлектрического материала, механически сцепленного с электроактивной полимерной структурой и/или к воспринимающей поверхностью, и электрически соединенного с контроллером, причем слой выполнен с возможностью измерения приложенной силы, действующей на него через воспринимающую поверхность. Это может предоставить дополнительное средство для измерения сил, действующих на воспринимающую поверхность. Это может улучшить чувствительность или предоставить дополнительную информацию, которая может помочь в измерении физиологического параметра или в измерении силы реакции, прикладываемой посредством воспринимающей поверхности.
Дополнительно или альтернативно в состав могут быть включены другие чувствительные элементы, такие как тензодатчик или небольшие твердые датчики давления, такие как динамометрические элементы или встроенные компоненты SMD.
Электроактивная полимерная структура в примерах может содержать релаксорный сегнетоэлектрический полимер. Они не являются сегнетоэлектрическими в отсутствие приложенного постоянного напряжения, и, следовательно, в этом состоянии не имеют электромеханической связи. При подаче напряжения постоянного тока электромеханическая связь становится ненулевой и может быть измерена путем подачи (или предоставления) высокочастотного сигнала малой амплитуды поверх смещения постоянным током. Следовательно, релаксорные сегнетоэлектрические материалы идеально подходят для вариантов осуществления настоящего изобретения.
Примеры в соответствии с дополнительным аспектом изобретения обеспечивают способ настройки физиологического считывающего устройства для оптимизации расположения считывающей поверхности относительно воспринимающей поверхности ткани человека, причем устройство содержит:
указанную считывающую поверхность;
электроактивную полимерную структуру, выполненную с возможностью деформации в ответ на подачу электрического сигнала,
причем способ включает в себя:
предоставление (или применение) сигнала, такого как электрический сигнал, составленного из наложенного сигнала воздействия и считывающего сигнала переменного тока на электроактивную полимерную структуру, причем сигнал воздействия предназначен для стимулирования деформации структуры, чтобы тем самым управлять считывающей поверхностью для приложения силы воздействия к воспринимающей поверхности, а считывающий сигнал переменного тока предназначен для обеспечения измерения давления и имеет гармоники частоты переменного тока либо с резонансной, либо с антирезонансной частотой электроактивной полимерной структуры;
контроль импеданса, проявляемого электроактивной полимерной структурой, по времени, чтобы тем самым обеспечить индикацию возвратной силы, действующей на электроактивную полимерную структуру со стороны воспринимающей поверхности по времени, и
регулирование величины приложенного сигнала воздействия в зависимости от измеренного импеданса, чтобы тем самым регулировать расположение считывающей поверхности относительно воспринимающей поверхности.
Примеры в соответствии с дополнительным аспектом изобретение также предоставляет компьютерную программу, содержащую средство кода компьютерной программы, которое, когда упомянутая программа выполняется на компьютере, адаптировано для реализации способа регулировки регулирования физиологического считывающего устройства, представленного выше.
Эти и другие аспекты настоящего изобретения будут очевидны и пояснены со ссылкой на описанные ниже варианты осуществления.
Специалистам в данной области следует иметь в виду, что два или более из вышеупомянутых вариантов, реализации и/или аспектов изобретения могут быть объединены тем или иным способом, представляющимся полезным.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты аппликаторного устройства, системы и способа согласно изобретению будут дополнительно разъяснены и описаны со ссылкой на прилагаемые чертежи, на которых:
На Фиг. 1 иллюстрируются общие принципы измерения кровяного давления на основе тонометрии;
на Фиг. 2 показано известное электроактивное полимерное устройство, которое не зажато;
на Фиг. 3 показано известное электроактивное полимерное устройство, которое ограничивается защитным слоем;
на Фиг. 4 показана простая конденсаторно-резисторная схема;
на Фиг. 5 показана простой первый пример считывающего устройства в соответствии с одним или несколькими вариантами осуществления изобретения;
на Фиг. 6 показаны изменения сопротивления и емкости с частотой для экземпляра ЭАП структуры;
на Фиг. 7 показан график, иллюстрирующий последовательное сопротивление (экземпляра ЭАП структуры) в зависимости от частоты сигнала датчика для двух разных фиксированных напряжений воздействия;
на Фиг. 8 показан график, иллюстрирующий различие между двумя вычерченными кривыми сигналов, показанных на Фиг.7;
на Фиг. 9 показан график, иллюстрирующий влияние приложенной силы нагрузки на измеренные значения сопротивления в диапазоне частот сигнала датчика;
на Фиг. 10 показан график, иллюстрирующий измеренные значения сопротивления по времени (для примера ЭАП исполнительного механизма), при котором нагрузка прикладывается в два разных момента времени;
на Фиг. 11 показано второе примерное сенсорное устройство, содержащее дополнительный чувствительный элемент;
на Фиг. 12 показано применение третьего примерного сенсорного устройства для выполнения измерения кровяного давления на основе тонометрии;
на Фиг. 13 показано четвертое примерное сенсорное устройство, содержащее массив ЭАП структур, установленных на гибком держателе; и
на Фиг. 14 показано пятое примерное сенсорное устройство, содержащее вторичный пьезоэлектрический чувствительный слой.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение относится к физиологическому сенсорному устройству, обладающего свойством автонастройки физиологической считывающей поверхности относительно воспринимающей поверхности ткани человека. Устройство включает в себя электроактивную полимерную (ЭАП) структуру, способную выполнять одновременное воздействие и измерение давления посредством подачи электрического сигнала, состоящего из наложенных сигнала воздействия и считывающего сигнала переменного тока. Воздействие обеспечивает управляемое регулирование расположения считывающей поверхности относительно воспринимающей поверхности ткани. Восприятие обеспечивает одновременное измерение в реальном времени величины возвратной силы, приложенной к считывающей поверхности воспринимающей поверхностью. Эта возвратная сила предоставляет сигнал обратной связи о состоянии расположения считывающей поверхности. Контроллер выполнен с возможностью регулирования сигнала воздействия в зависимости считываемых данных, чтобы тем самым регулировать расположение считывающей поверхности в режиме реального времени.
В вариантах осуществления возвратная сила может, кроме того, обеспечивать прямое или косвенное измерение физиологического параметра. В примерах он может извлекаться с помощью схемы фильтра.
Изобретение основано на использовании электроактивных полимеров для обеспечения одновременного совместного воздействия и измерения давления/нагрузки. Воздействие и считывание в одном и том же месте и в то же время повышает точность воздействия, предоставляя в реальном времени сигнал обратной связи о степени воздействия, и повышает точность измерения любого физиологического параметра, поскольку измерение может выполняться точно в том же месте, где прикладывается стимулирующее давление. Это особенно актуально в случае тонометрических методов (как обсуждалось выше).
Электроактивные полимеры (ЭАП) представляют собой новый класс материалов в области электрочувствительных материалов. ЭАП могут работать как датчики или исполнительные механизмы и их можно легко изготовить в различных формах, что позволяет легко интегрировать их в большое разнообразие систем.
Были разработаны материалы, у которых такие характеристики, как напряжение и деформация при их воздействии значительно улучшились за последние десять лет. Технологические риски были снижены до приемлемых уровней для разработки новой продукции, так что ЭАП коммерчески и технически становятся все более интересными. Преимущества ЭАП включают в себя низкое энергопотребление, малый форм-фактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, быстрое время отклика и циклическое воздействие.
Улучшенная производительность и особые преимущества ЭАП материала обуславливают возможность применения в новых приложениях.
ЭАП устройство можно использовать при любом применении, в котором требуется небольшое количество движения компонента или элемента на основе электрического воздействия. Точно так же технологию можно использовать для восприятия небольших движений.
Использование ЭАП позволяет выполнять функции, которые раньше были невозможны, или дает большие преимущества по сравнению с обычными решениями для датчиков и исполнительных механизмов из-за сочетания относительно большой деформации и усилия в небольшом объеме или тонком форм-факторе, по сравнению с обычными исполнительными механизмами. ЭАП также обеспечивают бесшумную работу, точное электронное управление, быструю реакцию и широкий диапазон возможных частот воздействия, таких как 0-1 МГц, чаще всего ниже 20 кГц.
Устройства, использующие электроактивные полимеры, можно подразделить на материалы, активируемые полем и ионами.
Примеры ЭАП активируемых полем, включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе ПВДФ) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные привитые полимеры, электрострикционную бумагу, электреты, электро вязкоэластичные эластомеры и жидкокристаллические эластомеры.
Примерами активируемых ионами ЭАП являются сопряженные/проводящие полимеры, ионные композиты полимер-металл (IPMC) и углеродные нанотрубки (УНТ). Другие примеры включают ионные полимерные гели.
ЭАП активируемые полем активируются электрическим полем через прямую электромеханическую связь. Они обычно требуют сильных полей (вольт на метр), но слабых токов. Полимерные слои, как правило, тонкие, чтобы поддерживать напряжение активации как можно ниже.
Ионные ЭАП активируются путем электрически индуцированного переноса ионов и/или растворителя. Обычно они требуют низкого напряжения, но большого тока. Им требуется жидкая/гелевая электролитная среда (хотя некоторые системы материалов также могут работать с использованием твердых электролитов).
Оба класса ЭАП имеют несколько представителей группы, каждый из которых имеет свои преимущества и недостатки.
Первым заметным подклассом активируемых полем являются пьезоэлектрические и электрострикционные полимеры. Хотя электромеханические характеристики традиционных пьезоэлектрических полимеров ограничены, прорыв в улучшении этих характеристик привел к созданию релаксорных полимеров ПВДФ, которые проявляют самопроизвольную электрическую поляризацию (выравнивание, вызванное полем). Эти материалы могут быть предварительно деформированы для улучшения характеристик в направлении деформации (предварительное деформирование приводит к лучшему молекулярному выстраиванию). Обычно используются металлические электроды, поскольку деформации обычно бывают умеренными (1-5%). Также могут использоваться другие типы электродов (такие как проводящие полимеры, масла на основе технического углерода, гели или эластомеры и т. д.). Электроды могут быть сплошными или сегментированными.
Другой подкласс, представляющий интерес из ЭАП, активируемых полем, это диэлектрические эластомеры. Тонкая пленка этого материала может быть зажата между соответствующими электродами, образуя плоский конденсатор. В случае диэлектрических эластомеров натяжение Максвелла, вызванное приложенным электрическим полем, приводит к натяжению на пленке, заставляя ее суживаться по толщине и расширяться по площади. Деформационные характеристики обычно увеличиваются посредством предварительного деформирования эластомера (требуется рамка для удерживания предварительной деформации). Деформации могут быть значительными (10-300%). Это также ограничивает тип электродов, которые можно использовать: для малых и умеренных деформаций можно рассматривать металлические электроды и проводящие полимерные электроды, для режима больших деформаций обычно используются масла на основе технического углерода, гели или эластомеры. Электроды могут быть сплошными или сегментированными.
Первым заметным подклассом ионных ЭАП являются ионные композиты полимер-металл (IPMC). IPMC состоят из набухающей при растворении ионообменной полимерной мембраны, наслоенной между двумя тонкими металлическими или углеродными электродами, и требуют использования электролита. Типичными материалами электродов являются Pt, Gd, CNTs, CPs, Pd. Типичными электролитами являются растворы Li+ и Na+ на водной основе. Когда прикладывается поле, катионы обычно перемещаются к стороне катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и расширению полимера. Деформация в области катода приводит к натяжению в остальной части полимерной матрицы, что приводит к изгибу в направлении анода. Изменение полярности приложенного напряжения меняет направление изгиба. Хорошо известными полимерными мембранами являются Nafion® и Flemion®.
Другим известным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Привод сопряженного полимера обычно состоит из электролита, зажатого двумя слоями сопряженного полимера. Электролит используется для изменения степени окисления. Когда к полимеру через электролит прикладывается потенциал, электроны добавляются или удаляются из полимера, вызывая окисление и восстановление. Восстановление приводит к сокращению, окисление - к расширению.
В некоторых случаях, добавляются тонкопленочные электроды, когда самому полимеру не достает проводимости (по размеру). Электролит может быть жидкостью, гелем или твердым материалом (то есть комплексом высокомолекулярных полимеров и солей металлов). Наиболее распространенными сопряженными полимерами являются полипирол (PPy), полианилин (PANi) и политиофен (PTh).
Исполнительный механизм также может быть сформирован из углеродных нанотрубок (УНТ), подвешенных в электролите. Электролит образует двойной слой с нанотрубками, что делает возможной инжекцию зарядов. Эта двухслойная инжекция зарядов считается основным механизмом исполнительных механизмах из УНТ. УНТ действует как электродный конденсатор с зарядом, инжектируемым в УНТ, который затем уравновешивается электрическим двойным слоем, образованным движением электролитов к поверхности УНТ. Изменение заряда на атомах углерода приводит к изменению длины связи C-C. В результате можно наблюдать расширение и сжатие одной УНТ.
На Фиг. 2 и 3 показаны два возможных режима работы ЭАП устройства.
Устройство содержит слой 26 электроактивного полимера, расположенный между электродами 22, 24 на противоположных сторонах слоя 26 электроактивного полимера.
На Фиг. 2 показано устройство, которое не зажато. Напряжение используется для того, чтобы заставить электроактивный полимерный слой расширяться во всех направлениях, как показано.
На Фиг. 3 показано устройство, которое спроектировано так, что расширение возникает только в одном направлении. Устройство поддерживается несущим слоем 28. Напряжение используется для того, чтобы заставить слой электроактивного полимера сгибаться или выгибаться.
Можно считать, что электроды, слой электроактивного полимера и носитель вместе составляют общую электроактивную полимерную структуру.
Природа этого движения проистекает, например, из взаимодействия между активным слоем, который расширяется при воздействии, и пассивным несущим слоем. Чтобы получить асимметричное изгибание вокруг оси, как показано, может, например, применяться молекулярная ориентация (растяжение пленки), что заставляет двигаться в одном направлении.
Расширение в одном направлении может быть результатом асимметрии в ЭАП полимере, или оно может быть результатом асимметрии в свойствах несущего слоя или комбинации обоих.
Электроактивную полимерную структуру, как описано выше, можно использовать как для воздействия, так и для считывания. Наиболее известные воспринимающие механизмы основаны на измерениях силы и обнаружении деформации. Например, диэлектрические эластомеры легко растягиваются под действием внешней силы. Подав на датчик низкое напряжение, можно измерить деформацию как функцию напряжения (напряжение является функцией площади).
Другим способом восприятия с помощью активируемых полем систем является непосредственное измерение изменения емкости или измерение изменений сопротивления электрода как функции деформации.
Пьезоэлектрические и электрострикционные полимерные датчики могут генерировать электрический заряд в ответ на приложенное механическое усилие (учитывая, что степень кристалличности достаточно высока, чтобы генерировать определяемый заряд). Сопряженные полимеры могут использовать пьезоионный эффект (механическое усилие приводит к влиянию ионов). УНТ испытывают воздействие изменения заряда на поверхности УНТ при воздействии усилия, которое можно измерить. Также было показано, что сопротивление УНТ изменяется при контакте с молекулами (например, O2, NO2) газа, что делает УНТ пригодными для использования в качестве детекторов газа.
В настоящем изобретении, в частности, используется другой воспринимающий механизм, посредством которого ЭАП способен работать для одновременного достижения воздействия и измерения давления/нагрузки на основе применения наложенного сигнала воздействия высокой амплитуды и считывающего сигнала переменного тока низкой амплитуды. Принципы, посредством которых одновременное считывание и воздействие достигаются в вариантах осуществления изобретения, будут теперь описаны подробно.
Как хорошо известно, применение смещения постоянным током (или смещения медленно изменяющимся переменным током) стимулирует деформацию ЭАП, степень деформации изменяется в зависимости от величины прикладываемого электрического сигнала. Наложение высокочастотного сигнала переменного тока поверх смещения также стимулирует механический деформационный отклик в материале, но деформационный отклик, который является периодическим, а не фиксированным (то есть колебание). Максимальная амплитуда высокочастотного сигнала должна поддерживаться на уровне, значительно меньшем, чем величина сигнала смещения (например, на два порядка ниже, чем у сигнала смещения, например, на 1% от сигнала смещения). В результате, соответствующая амплитуда смещения стимулированной деформации фактически незначительна по сравнению с первичным смещением воздействия. Поэтому наложение сигнала считывания не влияет на точность и стабильность воздействия.
Наложение колебательного сигнала с низкой амплитудой поверх смещения позволяет встроить механизм электрической обратной связи в сам основной приводной механизм исполнительного механизма. На определенных частотах, в частности на частотах, которые соответствуют частоте механического резонанса ЭАП структуры или являются гармоническими, в материале исполнительного механизма возникает небольшая механическая стоячая волна. Это, в свою очередь, влияет на электрические характеристики материала. Когда сигнал считывания подается на резонансной частоте материала, соответствующий импеданс материала ниже (по сравнению с тем, когда подается нерезонансной) из-за того, что механическая вибрация синфазна с электрическим сигналом возбуждения.
Частота механического резонанса структуры представляет собой частоту, с которой структура будет естественно стремиться колебаться, будучи смещенной из своего положения равновесия, и определяется внутренними структурными свойствами структуры (например, геометрией, размером, формой, толщиной и т. д.). Механические колебания ЭАП структуры не обязательно будут следовать частоте возбуждения электрического сигнала, подаваемого на нее, но будут иметь тенденцию к снижению до своей естественной резонансной частоты, причем частота возбуждения интерферирует с этими колебаниями либо с суммированием, либо с вычитанием, в зависимости от того, находится ли частота возбуждения в фазе или не совпадает по фазе с этой собственной частотой.
Когда высокочастотный сигнал подается при антирезонансной частоте of ЭАП структуры, импеданс ЭАП выше из-за механической вибрации материала, находящегося в противофазе с колебанием сигнала возбуждения (электрически индуцированные механические деформации не совпадают по фазе с электрическим возбуждением). Другими словами, всякий раз, когда, например, положительный ток подается на ЭАП через сигнал возбуждения, не совпадающие по фазе механические деформации в один и тот же момент индуцируют ток в противоположном направлении (т.е. несинхронно). В идеальном (модельном) случае эти противоположные токи взаимно компенсируют друг друга, и ток вообще не может течь (т. е. бесконечный импеданс), но в реальных сценариях полной компенсации не происходит, и этот эффект измеряют как (эффективное) более высокое сопротивление электрического тока (т. е. более высокий импеданс). В частности, когда сигнал подается с антирезонансной частотой материала исполнительного механизма, импеданс ЭАП максимален.
Соотношение может быть также понято при рассмотрении уравнения (3) ниже. Импеданс идеального ЭАП при резонансе и анти-резонансе зависит от конкретного типа или режима деформации. Наиболее часто приводят ЭАП в изгибный резонанс (т.е. в длину или ширину). Импеданс ЭАП определяется диэлектрическими свойствами материала и электромеханической связью, а также электрическими и механическими потерями. Для простоты, при игнорировании электрических и механических потерь, для ЭАП с длиной l, шириной w и толщиной t, деформирующемуся в боковом расширении, импеданс ЭАП определяется как:
 (3)
(3)
где εT33 - диэлектрическая постоянная, k31 - коэффициент боковой электромеханической связи, p - плотность ЭАП, и sE11 - податливость в боковом направлении. На антирезонансной частоте, ωa,  и Z самый высокий.
и Z самый высокий.
Реальный ЭАП имеет потери и может быть смоделирован или представлен конденсатором с последовательно включенным резистором, сопротивление которого наибольшее на антирезонансной частоте. Это показано на Фиг. 4. Поэтому в описаниях, которые следуют далее «импеданс» и «последовательное сопротивление» (RS) могут использоваться взаимозаменяемо применительно к устройству. Однако в этом контексте последовательное сопротивление следует понимать, как относящееся просто к модели, в которой исполнительный механизм/датчик представлен электронным образом как конденсатор, соединенный последовательно с резистором, имеющим сопротивление RS.
Вследствие описанной выше зависимости между импедансом и резонансом, когда сигнал возбуждения подается на антирезонансной частоте, любые небольшие отклонения, которые возникают на частоте, которая далека от антирезонансной, будут обнаруживаться при соответствующем резком падении в измеримом импедансе ЭАП структуры. Именно этот физический эффект позволяет достичь механического восприятия. Приложение давления или нагрузки к ЭАП структуре приводит к ослаблению любых резонансных эффектов, возникающих внутри материала. Если сигнал возбуждения колеблется на антирезонансной или резонансной частоте материала при приложении нагрузки, демпфирующий эффект можно будет распознавать в измерениях импеданса (т.е. последовательного сопротивления RS) EAP в реальном времени, так как внезапное прекращение резонанса приведет к резкому снижению импеданса. Таким образом путем контроля импеданса структуры по времени, пока исполнительный механизм находится в работе, можно воспринимать давление и нагрузки, приложенные к структуре, и в некоторых случаях измерять количественно (как будет описано ниже).
В частности, импеданс ЭАП структуры может отслеживаться в примерных вариантах осуществления посредством отслеживания напряжения и тока высокочастотного сигнала считывания во времени. Альтернативно, импеданс может отслеживаться путем отслеживания напряжения и тока сигнала воздействия высокой амплитуды. Опять же альтернативно, импеданс может отслеживаться посредством отдельной схемы контроля, имеющей отдельные выделенные измерительные электроды и схему анализа.
Частота высокочастотного сигнала считывания обычно может находиться в диапазоне от 1 кГц до 1 МГц, в зависимости от конкретной геометрии исполнительного механизма. Следует отметить, что в случае, когда сигнал возбуждения исполнительного механизма содержит сигнал возбуждения переменного тока, частота этого сигнала значительно ниже, чем частота переменного сигнала считывания. Напряжение (низкочастотное) воздействия в этом случае, может быть, например, по меньшей мере, на два порядка ниже, чем напряжение высокочастотного сигнала, чтобы избежать интерференции сигнала исполнительного механизма с измеряемым сигналом.
На Фиг. 5 схематично показан первый пример конфигурации для ЭАП структуры, реализованной в вариантах осуществления изобретения. ЭАП структура 34, содержащая слой 36 ЭАП материала, расположенный поверх нижнего пассивного несущего слоя 38, удерживается внутри корпуса 54 и электрически соединена с контроллером 42. Контроллер в примере на Фиг. 5 содержит как элементы генерирования сигнала, так и элементы обработки и анализа сигнала.
Элемент 56 управления исполнительным механизмом генерирует высокоамплитудный сигнал возбуждения исполнительного механизма (например, фиксированное напряжение смещения постоянным током), который передается на устройство 58 усилителя сигнала. Элемент 60 управления датчиком содержит как элемент 62 возбуждения для генерации высокочастотных сигналов считывания, так и элемент 64 обработки для анализа электрических свойств сигнала считывания после прохождения через ЭАП структуру. Элемент 60 управления датчиком (и, в частности, элемент 64 обработки элемента управления датчиком) сигнально соединен с элементом 56 управления исполнительным механизмом для передачи информации анализа сигнала на элемент управления исполнительным механизмом, для использования элементом управления исполнительным механизмом при управлении величиной сигнала возбуждения исполнительного механизма.
Для облегчения анализа электрических свойств сигнала считывания, контроллер 42 дополнительно содержит вольтметр 66, подключенный через ЭАП структуру 34, и амперметр 68, включенный последовательно между выходным электрическим выводом 72 исполнительного механизма и элементом 60 управления датчиком. Вольтметр 66 и амперметр 68 оба сигнально связаны с элементом 60 управления датчиком, так что сгенерированные ими данные могут использоваться элементом 64 обработки для определения импеданса ЭАП структуры 34 (то есть эквивалентного последовательного сопротивления RS где устройство моделируется как идеальный конденсатор с последовательно включенным резистором, т.е. действительной частью комплексного импеданса).
Элемент 82 объединителя выполняет суперпозицию сигналов возбуждения, генерируемые элементом 56 управления исполнительным механизмом (однажды усиленным усилителем 58) и элементом 60 управления датчиком. Элемент 82 объединителя может, например, содержать блок смещения постоянного тока в случае, когда сигнал возбуждения исполнительного механизма является сигналом постоянного тока. Элемент объединителя может в других примерах просто содержать последовательное соединение между усилителем 58 и элементом 60 управления датчиком.
Элемент 60 управления датчиком может быть выполнен с возможностью локального усиления сгенерированного сигнала считывания, перед его выводом на элемент объединителя.
Объединенный сигнал возбуждения затем передается на входной контакт 74 ЭАП структуры 34. ЭАП структура может содержать электроды по всей верхней и нижней плоской поверхности для генерации электрического поля по всему ЭАП слою. Компонент постоянного тока высокой амплитуды объединенного сигнала возбуждения стимулирует деформационный отклик в ЭАП структуре EAP, как показано на Фиг. 5. ЭАП структура удерживается внутри показанного корпуса 54. Для наиболее воспроизводимых (то есть надежных/точных) результатов ЭАП структура может быть зафиксирована на месте. Например, ЭАП структура может быть зажата внутри корпуса 54, корпус затем располагается таким образом, чтобы выровнять устройство с целевой областью воздействия и считывания участка воспринимающей поверхности 78 ткани человека.
В качестве иллюстрации, целевая область воспринимающей поверхности 78 показана на Фиг. 5, причем ЭАП структура 34 деформируется с помощью сигнала возбуждения постоянного тока (или медленно изменяющимся переменным током), чтобы прикладывать давление к целевой области. В примерах, целевая область может содержать, например, участок кожи субъекта. Показана ЭАП структура, оказывающая давление непосредственно на участок кожи пользователя. Однако это только для иллюстрации принципов воздействия и восприятия, в дополнительных примерах (которые будут описаны более подробно ниже), ЭАП структура может альтернативно прикладывать давление к второй считывающей поверхности другого чувствительного элемента, причем этот элемент прижимается к воспринимающей поверхности.
Возвратная сила, прикладываемая кожей к ЭАП структуре (или другой считывающей поверхности случае, когда устройство включает в себя дополнительный чувствительный элемент) может измеряться одновременно с воздействием.
Компонент переменного тока с низкой амплитудой сигнала возбуждения стимулирует периодический отклик с низкой амплитудой в ЭАП слое 36, например, колебание структуры на ее резонансной или антирезонансной частоте.
Напряжение объединенного сигнала возбуждения и результирующий ток подаются на элемент 60 управления датчиком. Обычно переменные токи могут находиться в диапазоне от 0,1 мА до 1 мА, но могут достигать 10 мА. Более высокие токи могут вызвать перегрев.
Элемент 64 обработки элемента 60 управления датчиком может использовать измерения, предоставляемые вольтметром 66 и амперметром 68, для определения импеданса исполнительного механизма, на который воздействует приложенный сигнал(ы) возбуждения, например, комплексного импеданса. В простых примерах может быть определено только последовательное сопротивление, или последовательное сопротивление может быть извлечено из определенного комплексного импеданса. В других примерах реактивное сопротивление также может быть определено, например, посредством извлечения из определенного комплексного импеданса. Реактивное сопротивление может представлять интерес во многих случаях, в частности, когда ЭАП структура содержит особенно тонкие слои ЭАП материала и, следовательно, склонна проявлять относительно высокие значения реактивного сопротивления.
Для простоты и ясности в настоящем примере предполагается, что определяется только последовательное сопротивление. Однако последующие объяснения следует понимать, как применимые без потери общности для случаев, когда определяется импеданс.
Последовательное сопротивление может определяться в реальном времени и отслеживаться, например, на наличие внезапных изменений сопротивления, которые, как объяснено выше, можно использовать для указания наличия и величины нагрузок и давлений, приложенных к ЭАП структуре 34. Чувствительный элемент может быть выполнен с возможностью получения из определенных последовательных значений сопротивления числовых значений для соответствующей приложенной силы или давления, указанных последовательным сопротивлением. Эти значения или в альтернативных примерах только значения сопротивления выводятся через выход 84 сигнала.
В соответствии с некоторыми примерами, элемент 60 управления датчиком и/или элемент 56 управления исполнительным механизмом может быть дополнительно снабжен сигнальным входом для передачи пользовательских управляющих сигналов. Пользовательские управляющие сигналы могут быть предназначены, например, для регулировки режима или рабочего режима сенсорного устройства.
Элемент 60 управления датчиком (и, в частности, элемент 64 обработки элемента управления датчиком) также сигнально соединен с элементом 56 управления исполнительным механизмом, и определенные последовательные значения сопротивления или рассчитанные значения силы передаются на элемент управления исполнительным механизмом. Элемент управления исполнительным механизмом выполнен с возможностью регулирования амплитуды сигнала возбуждения исполнительного механизма в зависимости от значений сопротивления или силы. Таким образом применение считывающей поверхности ЭАП структуры или дополнительного вспомогательного средства воспринимающего устройства регулируется и управляется в зависимости от данных обратной связи по силе, предоставленных посредством анализа последовательного сопротивления приложенного сигнала (сигналов).
В некоторых случаях элемент 60 управления датчиком может дополнительно содержать одну или несколько схем фильтра для выделения различных компонентов из полученных количественных оценок сопротивления или силы. Например, может иметься фильтр нижних частот для извлечения компонента, соответствующего силе упругой реакции поверхности 78 кожи, для приложения возбуждающей силы. Может иметься фильтр нижних частот для извлечения компонента, соответствующего одному или нескольким физиологическим параметрам, таким как кровяное давление или частота пульса. В этом случае устройство может быть приложено к коже субъекта в соответствующем положении, например, над артерией или веной. Это будет описано более подробно ниже.
Контроллер в примерах может содержать или состоять из микропроцессора. Различные компоненты контроллера, показанные на Фиг. 5 в этом случае могут пониматься как представляющие просто условно отдельные части функционирования такого микропроцессора. Физическая структура может варьироваться, вместе с тем включая в себя функциональную структуру, показанную на Фиг. 5.
Как указано выше, элемент 62 возбуждения датчика выполнен с возможностью генерирования сигнала переменного тока для приложения к ЭАП структуре 34, имеющего частоту, которая находиться в резонансе с резонансной или антирезонансной частотой ЭАП структуры. На антирезонансной частоте импеданс ЭАП структуры минимален. На резонансной частоте импеданс ЭАП структуры максимален. Эквивалентно, ЭАП может быть смоделирован или представлен конденсатором с последовательно включенным резистором (как показано на Фиг. 4), сопротивление которого является наибольшим на антирезонансной частоте и самым низким на резонансной частоте.
Это показано на Фиг. 6, в частности, для антирезонанса. На графике показаны измеренные значения как последовательного сопротивления, так и емкости для образца ЭАП при непрерывной развертке различных частот применяемого сигнала переменного тока. Измеренное последовательное сопротивление (в Омах) отображается по одной оси Y, измеренная емкость (в Фарадах) отображается по другой оси Y, а частота сигнала датчика (в Гц) - по оси X.
График 92 - это сопротивление, а график 94 - это емкость. Стрелка 96 указывает на сильный локальный пик измеренного сопротивления, возникающий на частоте приблизительно 29,8 кГц. Для сравнения произвольно выбранная точка вне (анти)резонанса, возникающая на частоте приблизительно 20 кГц, обозначена стрелкой 98. Пик 96 представляет антирезонансный пик для конкретного образца EAP, для которого сопротивление находится в локальном максимуме. Следовательно, антирезонансная частота составляет 29,8 кГц для этого отобранного ЭАП. Графики представлены для напряжения смещения 200 В.
В целях первоначальной конфигурации ЭАП структуры 36 в состоянии резонанса или антирезонанса, вследствие чего могут быть обнаружены силы и давления, может быть необходимо или желательно выполнить один или несколько шагов калибровки до работы исполнительного механизма, чтобы определить резонансную или антирезонансную частоту устройства. С этой целью может быть выполнена «развертка», для каждого из двух или более фиксированных напряжений воздействия в диапазоне частот сигналов датчиков и измерено соответствующее последовательное сопротивление для каждой из частот датчиков.
На Фиг. 7 показан набор результатов для одного примера развертки, в котором измеренное последовательное сопротивление (в омах) показано по оси Y 104, а частота сигнала датчика (в Гц) по оси X 106, и на котором график 108 показывает соответствующую кривую для напряжения 0 В воздействия (т.е. без воздействия) и график 110 - кривую для напряжения воздействия 150 В. Как видно из графика, значения сопротивления для развертки 150 В демонстрируют небольшой скачок в двух точках вдоль развертки - примерно в 24 кГц и примерно в 40 кГц.
Значения сопротивления для развертки 0 В указывают на отсутствие изменений относительно начальной кривой (которая отражает просто емкостную функцию комплексного импеданса), поскольку частота переменного тока изменяется. Эффективность электромеханической связи в ЭАП материале зависит от величины напряжения смещения постоянным током (чем больше смещение постоянным током, тем лучше связь). При смещении 0 В отсутствует или практически отсутствует связь, и, следовательно, нулевой (или неизмеримо малый) деформационный отклик в материале на сигнал переменного тока. Следовательно, развертка смещения 0 В предоставляет удобную базовую линию, с которой можно сравнивать AC развертку по частоте переменного тока при более высоком (вызывающем воздействие) напряжении постоянного тока.
Антирезонансная частота устройства может быть идентифицирована путем нахождения частоты переменного тока, для которой разница между измеренными значениями сопротивления для двух напряжений постоянного тока является наибольшей. На Фиг. 8 более четко проиллюстрированы различия между двумя кривыми 108 и 110 сигналов, с разницей в измеренном сопротивлении 112 по оси Y и соответствующей частоте 106 сигнала датчика по оси X. На этом графике отчетливо видны два больших скачка сопротивления, причем больший из двух скачков происходит на 24 кГц. Следовательно, антирезонансная частота для примерного устройства, представленного на Фиг.7 и 8, составляет 24 кГц. Это точка наивысшей чувствительности для устройства, то есть точка, в которой последовательное сопротивление наиболее чувствительно к изменениям частоты подаваемого сигнала возбуждения (или к изменениям антирезонансной частоты структуры, для фиксированной подаваемой частоты возбуждения).
Хотя смещение постоянным током 0 В используется для первой развертки в примере на Фиг.7 и 8, в альтернативных примерах может использоваться другое (ненулевое) первое смещение. В этом случае, в зависимости от величины первого напряжения, первая развертка может указывать изменения или пики около центральной кривой. Однако антирезонансная частота все еще может быть найдена путем определения частоты, для которой разница между измеренными значениями сопротивления для двух напряжений постоянного тока является наибольшей.
Чтобы проиллюстрировать эффект приложения нагрузки к устройству, на Фиг. 9 показаны два сопротивления 120 как функция частоты 106 «разверток» для одного и того же фиксированного (150 В) напряжение смещения постоянным током, но соответствующего различным нагрузкам, приложенным к исполнительному механизму. Линия 122 представляет развертку без нагрузки, приложенной к устройству. Следовательно, эта линия идентична линии 110 на Фиг. 7, но показана для более узкого диапазона частот и сопротивлений. Линия 124 представляет развертку для нагрузки 0,01 Н, приложенной к исполнительному механизму. Как видно, эффект нагрузки заключается в том, чтобы эффективно «сгладить» резкое увеличение сопротивления на резонансной частоте устройства ~ 24 кГц. Приложения 0,01 Н к устройству достаточно, чтобы ослабить большую часть резонансного эффекта, вызванного поданным высокочастотным сигналом. Это демпфирование позволяет обнаруживать наличие даже небольших нагрузок.
Этот демпфирующий эффект тем больше, чем выше величина приложенной нагрузки. Эта взаимосвязь позволяет прикладывать нагрузки не только для обнаружения, но и для количественного измерения. Для обеспечения измерения нагрузок может потребоваться выполнить дополнительный этап калибровки перед работой исполнительного механизма. Этот этап калибровки выполняется после определения антирезонансной частоты (описано выше). Как только антирезонансная частота известна, может выполняться развертка для фиксированного напряжения смещения постоянным током и для фиксированной частоты переменного тока (то есть антирезонансной частоты), но измеряя последовательное сопротивление как функцию приложенной к устройству нагрузки. Как только это соотношение известно для данного сигнала с фиксированной частотой, оно может использоваться во время работы устройства, чтобы позволить измеренному последовательному сопротивлению обеспечить почти прямое измерение величины приложенной нагрузки.
Чтобы проиллюстрировать это, на Фиг. 10 показан сигнал 128, представляющий измеренное последовательное сопротивление 130 (в Ом) с течением времени (в произвольных единицах) 132 для примерного исполнительного устройства, приводимого в действие с фиксированным смещением постоянным током 150 В и с фиксированной частотой 24 кГц (резонансная частота рассматриваемого устройства) переменного тока. В моменты времени t=350 и время t=500 привод нагружен нагрузкой 0,01 Н. Это приводит в каждом случае к резкому снижению сопротивления 130, которое длится на период прикладывания нагрузки. Из Фиг. 10 видно, что устройство обеспечивает быстрый и высокоточный отклик на приложенные нагрузки, что идеально подходит для датчиков. Хотя величина приложенной силы в этом случае уже известна, благодаря выполнению этапа калибровки, описанного выше, перед началом работы, график вида, показанного на Фиг. 10, можно легко использовать не только для определения хронирования событий нагрузки, но также их точных величин.
Как указано выше, в соответствии с настоящим изобретением возможен ряд различных вариантов конфигурации, чтобы обеспечить автоматическую регулировку расположения физиологической считывающей поверхности относительно воспринимающей поверхности ткани человека.
Согласно, по меньшей мере, первому набору примерных вариантов осуществления, ЭАП структура, описанная выше, может быть размещена и выполненный с возможностью манипулирования считывающей поверхностью еще одного дополнительного физиологического сенсорного устройства. Это устройство идеально встроено как часть самого считывающего устройства. Пример показан в качестве иллюстрации на Фиг. 11, где сенсорное устройство содержит дополнительный физиологический сенсорный элемент 140, имеющий считывающую поверхность, расположенную так, что она обращена к подходящей области поверхности кожи 144 субъекта.
Сенсорный элемент 140 может быть выполнен с возможностью обеспечения функции физиологического зондирования в соответствии с любым из широкого диапазона различных принципов или способов. К ним относятся, но не в ограничительном смысле, устройства для измерения ЭЭГ, ЭКГ, сердцебиения, содержания кислорода в крови (SpO2) и артериального давления. В одном предпочтительном наборе вариантов осуществления чувствительный элемент на основе ФПГ может быть встроен в считывающее устройство. Одна или несколько оптических считывающих поверхность поверхностей такого устройства на основе ФПГ могут быть расположены совместно с ЭАП структурой, чтобы сделать возможной регулирование расположения поверхностей относительно поверхности кожи.
Чувствительный элемент может включать в себя выход (проводной или непроводной) сигнала для вывода данных физиологического зондирования.
Как показано, ЭАП структура 34 предоставляется зажатой внутри корпуса 54. Левая сторона Фиг. 11 показывает структуру в свободном неактивном состоянии. Правая сторона Фиг. 11 показывает структуру в активном состоянии при воздействии. При подаче сигнала воздействия, структура деформируется вверх, тем самым прижимая физиологически чувствительный элемент 140 в упор к поверхности области кожи или ткани 144. Посредством подачи считывающего сигнала переменного тока и измерения значений импеданса или сопротивления может быть получена количественная оценка возвратной силы, приложенной к чувствительному элементу 140 воспринимающей поверхностью 144 кожи. Будучи примененной к элементу датчика, поскольку элемент расположен для прямого механического взаимодействия с ЭАП структурой, эта сила передается через элемент, и может быть измерена ЭАП структурой.
Измеренные значения возвратной силы используются контроллером (не показан) для регулирования величины подаваемого сигнала воздействия. Например, контроллер может быть выполнен с возможностью регулирования сигнала воздействия так, чтобы поддерживать измеренное значение импеданса, сопротивления или силы, по существу, постоянным или одинаковым.
Согласно, по меньшей мере, второму набору примеров, сама ЭАП структура может быть выполнена с возможностью обеспечения измерений одного или нескольких физиологических параметров. В этом случае поверхность самой ЭАП структуры предоставляет считывающую поверхность, которой манипулируют с помощью устройства, чтобы отрегулировать ее расположение относительно воспринимающей поверхности ткани человека. На Фиг. 12 показан один пример, в котором ЭАП структура 34 реализована для предоставления измерений кровяного давления на основе тонометрии.
На фигуре показана примерная ЭАП структура 34, приложенная к поверхности 144 кожи субъекта непосредственно над артерией 152, причем артерия смыкается c костью 150, расположенной под артерией. Левая сторона фигуры показывает структуру в свободном неактивном состоянии. Правая сторона показывает ЭАП структуру в активном состоянии при воздействии. Как показано, активация ЭАП структуры 34 оказывает давление на артерию 152, тем самым прижимая ее к кости 150, расположенной снизу. Как давление прикладывается к поверхности 144 кожи ЭАП структурой, возвратная сила прикладывается поверхностью кожи обратно к контактирующей поверхности ЭАП структуры. Эта возвратная сила может быть измерена посредством применения наложенного резонансного или антирезонансного считывающего сигнала переменного тока и измерения значений проявляемого импеданса или сопротивления по времени (как описано выше).
Полученные значения силы или импеданса обычно могут состоять из двух компонентов. Первый компонент представляет собой компонент силы реакции, создаваемый в ответ на приложение возбуждающей силы, приблизительно равный и противоположный по величине и направлению приложенной силе воздействия. Этот компонент возникает в результате третьего закона Ньютона и, поскольку он равен и противоположен силе воздействия, может предоставить косвенную количественную оценку силы воздействия, которая прикладывается к коже ЭАП структурой 34. Второй компонент представляет собой физиологический компонент, возникающий в результате давления крови, протекающей через артерию 152.
Для целей этого варианта осуществления контроллер (не показан) может содержать схему фильтра, которая включает в себя фильтр верхних частот или фильтр нижних частот, или оба. Схема фильтра позволяет извлекать из полученных значений импеданса или сопротивления подмножество значений, представляющих каждый из компонентов: силу реакции и физиологический компонент. Фильтр нижних частот позволяет извлечь компонент силы реакции, поскольку этот компонент обычно относительно статичен и имеет незначительные или нулевые флуктуации. Его частота практически равна нулю. Фильтр верхних частот позволяет извлекать физиологический компонент, соответствующий, например, кровяному давлению или частоте пульса, поскольку он естественным образом колеблется в соответствии с циклическим пульсированием крови через артерию.
Как обсуждалось в предыдущем разделе, для тонометрии важно, чтобы силой, прикладываемой к артерии, тщательно управляли, чтобы обеспечить, по меньшей мере, частичное сжатие артерии, но не полное прижатие. Интегрированную возможность воспринимать силу ЭАП структуры 34 можно использовать для предоставления сигнала обратной связи в отношении величины силы, прикладываемой к артерии 152. В частности, контроллер может быть выполнен с возможностью регулирования напряжения воздействия, приложенного к ЭАП структуре, в зависимости от извлеченной составляющей силы реакции измеренной возвратной силы. Контроллер может быть запрограммирован, например, для обеспечения того, чтобы составляющая силы реакции оставалась в пределах определенного набора определенных пороговых значений.
Как только требуемое давление или сила достигнута, контроллер может быть выполнен с возможностью реализации, например, функции контура управления, посредством которой изменения в воспринимаемой силе реакции стимулируют надлежащее регулирование приложенного напряжения воздействия для поддержания силы реакции (и, следовательно, прикладываемой силы воздействия) на требуемом уровне.
Эта функциональность также позволяет устройству компенсировать любые непреднамеренные артефакты движения, вызванные случайными внешними толчками или движениями пользователя.
Там, где в состав входит соответствующая схема фильтра, этот контур управления регулированием может быть реализован одновременно с получением измерений кровяного давления крови, протекающей через артерию 152.
Для повышения эффективности или точности, в соответствии с вариацией этого варианта осуществления, может быть реализована схема хронирования, в которой физиологические измерения и измерения силы реакции получают в разное время, поочередно или последовательно. Там, где требуются физиологические измерения, функция контура управления может быть прекращена или приостановлена, пока для получения этих измерений анализируется сигнал импеданса. Как только физиологические показатели получены, контур управления может быть возобновлен. Это позволило бы избежать необходимости получать оба сигнала одновременно, упрощая, таким образом, процессы управления и, например, уменьшая необходимую вычислительную мощность.
В еще одном варианте контроллер может быть выполнен с возможностью регулирования величины приложенного напряжения воздействия (и, следовательно, силы воздействия) в зависимости только от физиологической составляющей измеренной возвратной силы. В частности, колебания давления, вызванные изменениями кровяного давления в артерии 152, компенсируются регулированием сигнала возбуждения исполнительного механизма, чтобы поддерживать приблизительно одинаковую воспринимаемую возвратную силу. Поскольку как для управления регулированием степени воздействия ЭАП, так и для получения физиологических показателей используется только физиологический компонент, требуется только один фильтр (фильтр нижних частот), и требуется извлечь только один сигнал. Это уменьшает сложность управляющей электроники, тем самым снижая стоимость и сложность изготовления, а также ограничивая требуемую вычислительную мощность и сложность обработки.
В соответствии с еще одним примером набора вариантов осуществления считывающее устройство может быть выполнено с возможностью обнаружения колебательных изменений кровяного давления. В этом случае контроллер выполнен с возможностью управления ЭАП структурой 34, чтобы сначала прикладывать начальное давление к поверхности 144 кожи, чтобы тем самым частично прижимать артерию 152 к кости 150 снизу. Уровнем этого начального давления можно управлять, например, посредством измерения составляющей силы реакции возвратной силы. Это давление затем постепенно снижается. Во время снижения давления физиологический компонент измеренных значений импеданса, сопротивления или силы контролируется для обнаружения и регистрации колебательных изменений импеданса (проявляемой силы), возникающих в результате колебаний стенок кровеносных сосудов, вызванных кровотоком между систолическим и диастолическим кровяным давлением.
В соответствии с этим или другими вариантами осуществления, основанными на тонометрии, контроллер может быть выполнен с возможностью регулирования сигнала воздействия в зависимости от измеряемого кровяного давления (или другого физиологического параметра). Например, может быть выполнен с возможностью обнаружения изменений измеряемого кровяного давления и компенсации этих изменений, чтобы гарантировать, что поддерживается постоянная контактная сила между поверхностью кожи и ЭАП поверхностью. Например, если кровяное давление становится выше, сил воздействия ЭАП может уменьшиться (путем снижения напряжения воздействия), и наоборот. Это может проявляться в управлении напряжением воздействия ЭАП, чтобы поддерживать постоянным обнаруживаемый импеданс.
В соответствии с еще одним набором вариантов осуществления массив ЭАП структур 34 может быть предоставлен как часть сенсорного устройства, установленного на гибком носителе 160, где каждая ЭАП структура управляется в соответствии со способами и принципами, описанными выше. Пример показан на Фиг. 13.
Каждая структура 34 может работать с тем, чтобы предоставлять независимые показатели конкретного физиологического параметра в другом конкретном месте кожи пользователя. Это повышает точность и надежность измерений, а также позволяет получать дополнительную физиологическую информацию, такую как изменения физиологических параметров в зависимости от места или информацию о направлении.
Кроме того, такая множественная компоновка может уменьшить необходимость в том, чтобы очень точно располагать ЭАП структуры 34, так как можно воспринимать сразу несколько различных областей, гарантируя, что, данные, например, не будут пропущены.
Множество ЭАП структур 34 можно расположить в двумерной конфигурации на гибком носителе 160. Это может сформировать регулярный массив или нерегулярный массив, или пласт.
EAP по своей природе являются гибкими. Это позволяет легко встраивать структуры в гибкий носитель 160. Гибкий носитель может быть встроен в гибкую ленту/повязку или другую пригодную для носки структуру для предоставления пригодного для ношения физиологического сенсорного устройства. В примерах оно может прикладываться, например, к руке (например, запястью), пальцу или даже быть встроено в клейкий материал типа пластыря, который можно сцепить с любой необходимой частью человеческого тела.
Согласно еще одному примерному набору вариантов осуществления, могут быть предусмотрены дополнительные силы или чувствительные к давлению элементы для улучшения или увеличения способности восприятия ЭАП структуры. Пример показан на Фиг. 14. Здесь сенсорное устройство дополнительно содержит слой пьезоэлектрического материала 170 в форме электрода, механически сцепленного с электроактивной полимерной структурой, и электрически соединенного с контроллером. Слой выполнен с возможностью измерения приложенной силы, действующей на него через воспринимающую поверхность. Это может предоставить дополнительное средство для измерения сил, действующих на воспринимающую поверхность. Это может улучшить чувствительность или предоставить дополнительную информацию, которая может помочь в измерении физиологического параметра или в измерении силы реакции, прикладываемой воспринимающей поверхностью.
Пьезоэлектрический материал 170 может представлять собой слой материала из поливинилиденфторида (ПВДФ). Этот материал может образовывать тонкий, очень гибкий лист или пленку, которые могут иметь произвольную форму и укладываться друг на друга, например, для создания многослойной конфигурации. Это делает его очень отвечающим требованиям к встраиванию в ЭАП структуру 34, как показано в примере на Фиг. 14.
ПВДФ электрод 170 может содержать более одного слоя ПВДФ. Электрод может быть механически сцеплен (например, приклеен) к ЭАП структуре 34. Воспринимаемый выход пьезоэлектрического электрода может использоваться контроллером для регулирования или настройки сигнала воздействия, подаваемого на ЭАП структуру. Таким образом, сигнал воздействия может управляться, по меньшей мере, частично, в зависимости от вывода пьезоэлектрического слоя 170. Пьезоэлектрический слой/электрод может дополнительно или альтернативно использоваться для восприятия или измерения давления, прикладываемого в результате одного или нескольких физиологических параметров или явлений, таких как кровяное давление или частота пульса.
Дополнительно или альтернативно в состав могут быть включены другие чувствительные элементы, такие как тензодатчик или небольшие твердые датчики давления, такие как динамометрические элементы или встроенные компоненты SMD.
В соответствии с другими примерными вариантами осуществления, ЭАП структура может дополнительно управляться для обеспечения измерений температуры в дополнение к измерениям нагрузки/давления. Оба могут быть предоставлены одновременно с воздействием. Измерение температуры может быть непосредственно достигнуто в вариантах осуществления посредством наложения второго низкоамплитудного считывающего сигнала переменного тока поверх сигнала на частоте, которая отличается от частоты первого (основного) сигнала считывания (для измерения давления/нагрузки).
Вторая частота - это частота, для которой импеданс или последовательное сопротивление, проявляемое ЭАП является постоянным по отношению к приложенным нагрузкам, но для которого импеданс или последовательное сопротивление изменяется предсказуемым образом по отношению к температуре.
Первый и второй сигналы считывания могут, например, подаваться попеременно, чтобы таким образом отделить влияние температуры на сигнал давления. Чередование подачи двух сигналов считывания может быть выполнено на относительно быстрой частоте чередования, так что измерения нагрузки/давления и измерения температуры достигаются, по существу, одновременно. Таким образом, время подачи сигнала эффективно распределяется между считыванием температуры и давления/силы, но таким образом, что измерения каждого из них все же могут быть получены с высокой степенью регулярности.
Чтобы получить измерения температуры, второй (температурный) сигнал считывания должен иметь частоту, при которой проявляемый импеданс изменяется надежным и предсказуемым образом в зависимости от температуры ЭАП структуру (или среды, окружающей ЭАП структуру). Проявляемый импеданс при каждой взятой температуре также в общем случае будет зависеть от поданного во время измерения сигнала.
Процесс калибровки может быть выполнен до операции, в которой импеданс ЭАП структуры измеряется для каждого из ожидаемого возможного диапазона подаваемых сигналов воздействия, при каждом из требуемого диапазона различных температур. Соответственно, может быть сгенерирована таблица соответствия соответствующих проявляемых импедансов для подаваемого сигнала воздействия при каждой отдельной температуре. Эту таблицу соответствия можно использовать во время работы вариантов осуществления для определения на основе измеренного импеданса и на основе известного поданного сигнала воздействия оценочной температуры ЭАП структуры (или ее среды).
Определение измерений температуры в дополнение к измерениям силы/нагрузки может дать дополнительную полезную физиологическую информацию. Измерения температуры могут позволить получить дополнительную или более подробную, или точную физиологическую информацию. В примерах это может быть объединено, например, с тонометрическими измерениями кровяного давления, чтобы добавить большую степень охвата или детализацию к данным давления.
В других примерах измерение температуры может использоваться в качестве средства определения или направления расположения устройства относительно одной или нескольких физиологических структур или особенностей. Это, в частности, относится к физиологическим структурам или особенностям, проявляющим сильно выраженные температурные характеристики, таким как, например, вены или артерии, которые обычно демонстрируют повышенную температуру относительно окружающих тканей (из-за объема крови, протекающей через них). Этот температурный «сигнал» или индикатор можно использовать в вариантах осуществления устройства для обеспечения возможности определения положения ЭАП структуры относительно заданной физиологической особенности и, например, для указания или информирования либо о первоначальном расположении ЭАП структуры, либо об активированной регулировке положений структуры.
В предпочтительных вариантах осуществления слой исполнительного механизма может содержать слой релаксорного сегнетоэлектрического материала, который особенно подходит для функций одновременного считывания и воздействия. Релаксорные сегнетоэлектрические материалы не являются сегнетоэлектрическими при нулевом напряжении постоянного тока. Таким образом в материале отсутствует электромеханическая связь. Электромеханическая связь становится ненулевой при подаче напряжения смещения постоянным током и может быть измерена путем подачи высокочастотного сигнала малой амплитуды поверх смещения постоянным током в соответствии с процедурами, описанными выше. Кроме того, релаксорные сегнетоэлектрические материалы выигрывают от уникального сочетания сильной электромеханической связи при ненулевом смещении постоянным током и хороших характеристик воздействия.
Подходящие материалы для ЭАП слоя включают в качестве неограничивающих примеров поливинилиденфторид - трифторэтилен - хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид - трифторэтилен - хлортрифторэтилен) (PVDF-TrFE-CTFE), поливинилиденфторид - трифторэтилен - гексафторпропилен (PVDF - TrFE - HFP) или их смеси.
Для воздействия на поведение ЭАП слоя в ответ на приложенное электрическое поле могут быть предусмотрены дополнительные пассивные слои.
ЭАП слой может быть зажат между электродами. Электроды могут быть растягиваемыми, так что они следуют за деформацией слоя ЭАП материала. Материалы, подходящие для электродов, также известны и могут, например, быть выбраны из группы, состоящей из тонких металлических пленок, таких как золото, медь или алюминий, или органических проводников, таких как технический углерод, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например поли(3,4-этилендиокситиофен) поли(стирол сульфонат) (PEDOT:PSS). Также могут использоваться металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (ПЭТ), например, с использованием алюминиевого покрытия.
Материалы для разных слоев будут выбраны, например, с учетом модулей упругости (модулей Юнга) разных слоев.
Для улучшения электрического или механического поведения устройства могут использоваться дополнительные слои к тем, которые обсуждались выше, как например дополнительные слои полимера.
Устройство может использоваться в качестве единственного исполнительного механизма, или же может быть линия или массив устройств, например, для обеспечения управления 2D или 3D контуром.
Изобретение может применяться во многих приложениях ЭАП физиологических датчиков, в том числе в примерах, где представляет интерес пассивная матрица исполнительных механизмов.
Для таких применений требуется работа при низком напряжении, и воздействия предпочтительно ниже 300 В. Меньшее напряжение считывания переменного тока обычно может быть ниже 20 В.
Как указано выше, варианты осуществления используют контроллер. Контроллер может быть реализован множеством способов, с программным и/или аппаратным обеспечением, для выполнения различных требуемых функций. Процессор является одним примером контроллера, который использует один или несколько микропроцессоров, которые могут быть запрограммированы с использованием программного обеспечения (например, микрокода) для выполнения требуемых функций. Однако контроллер может быть реализован с использованием или без использования процессора, а также может быть реализован как комбинация выделенного аппаратного обеспечения для выполнения некоторых функций и процессора (например, одного или нескольких запрограммированных микропроцессоров и связанных схем) для выполнения других функций.
Примеры компонентов контроллера, которые могут использоваться в различных вариантах осуществления настоящего раскрытия, включают в качестве неограничивающих примеров, обычные микропроцессоры, специализированные интегральные схемы (ASIC) и программируемые пользователем матрицы логических элементов (FPGA).
В различных реализациях процессор или контроллер могут быть связаны с одним или несколькими носителями хранения, такими как энергозависимая и энергонезависимая компьютерная память, такая как ОЗУ, ППЗУ, ЭППЗУ и ЭСППЗУ. Носитель хранения может быть закодирован одной или несколькими программами, которые при выполнении на одном или нескольких процессорах и/или контроллерах выполняют требуемые функции. Различные носители хранения могут быть закреплены в процессоре или контроллере, или могут быть переносными, так что одна или несколько сохраненных на нем программ могут быть загружены в процессор или контроллер.
Изучив рисунки, раскрытие, и приложенную формулу изобретения, специалисты в данной области смогут понять и осуществить при практической реализации заявленного изобретения другие вариации показанных вариантов осуществления. В формуле изобретения слово «содержит» не исключает других элементов или этапов, и формы единственного числа не исключают множественного числа. Сам факт того, что определенные меры перечислены во взаимно отличных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих мер нельзя использовать с пользой. Любые ссылочные позиции в формуле изобретения не должны рассматриваться в качестве ограничения объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНОЕ И СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2721302C2 |
| ДАТЧИК ПОТОКА И СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА | 2017 |
|
RU2768159C2 |
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| ИСПОЛНИТЕЛЬНОЕ И СЧИТЫВАЮЩЕЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2018 |
|
RU2753750C2 |
| УСТРОЙСТВО МОЛОКООТСОСА | 2017 |
|
RU2754631C2 |
| ЗУБНАЯ ЩЕТКА С СИСТЕМОЙ ВЫБОРА НА ОСНОВЕ ПЕРЕМЕННОГО СЕНСОРНОГО ВОЗДЕЙСТВИЯ И СПОСОБ ЕЕ РАБОТЫ | 2014 |
|
RU2652325C1 |
| УСТРОЙСТВО С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2720478C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ СЧИТЫВАНИЯ, ОСНОВАННЫЙ НА ЭЛЕКТРОАКТИВНОМ МАТЕРИАЛЕ | 2017 |
|
RU2720128C2 |
| ЭАП-ПРИВОД И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2750680C2 |
| УСТРОЙСТВО ПРИВОДА И СПОСОБ | 2017 |
|
RU2749570C2 |
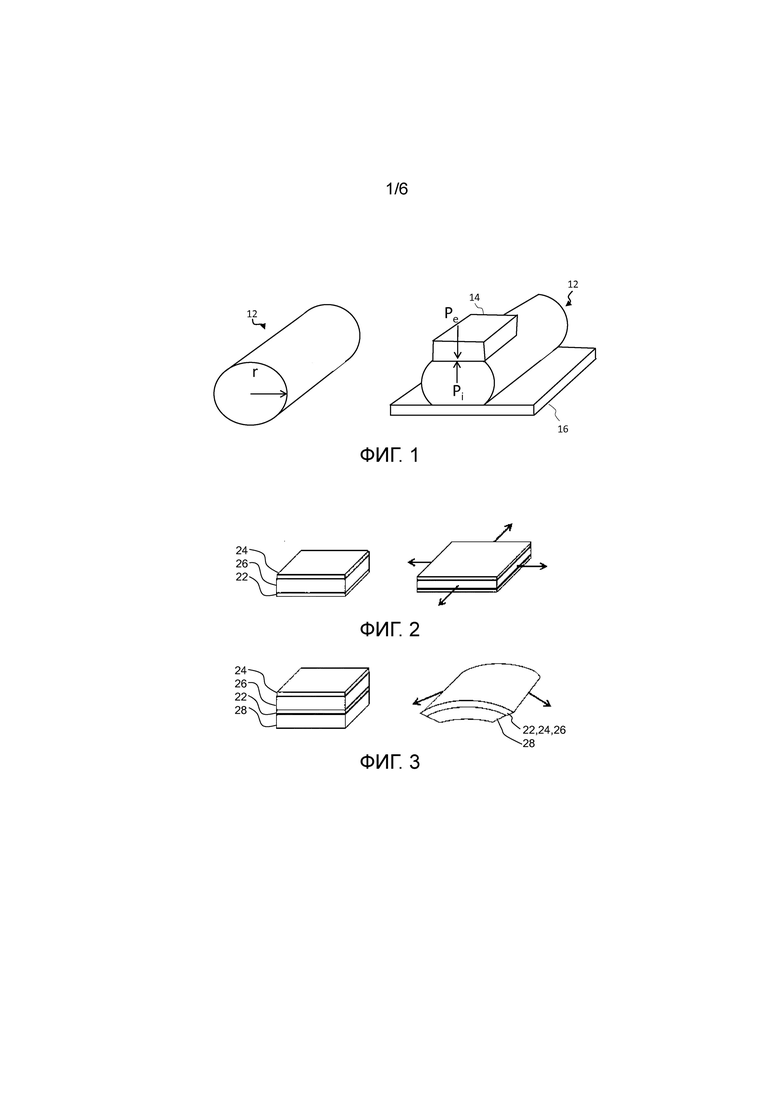
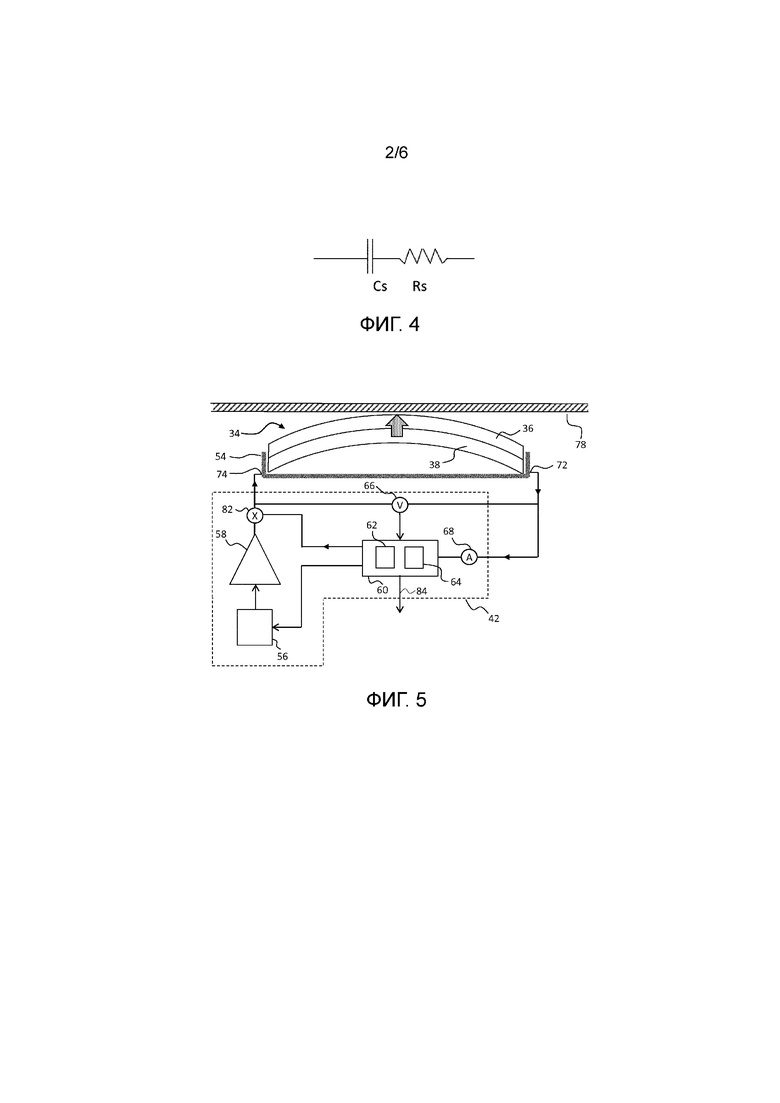
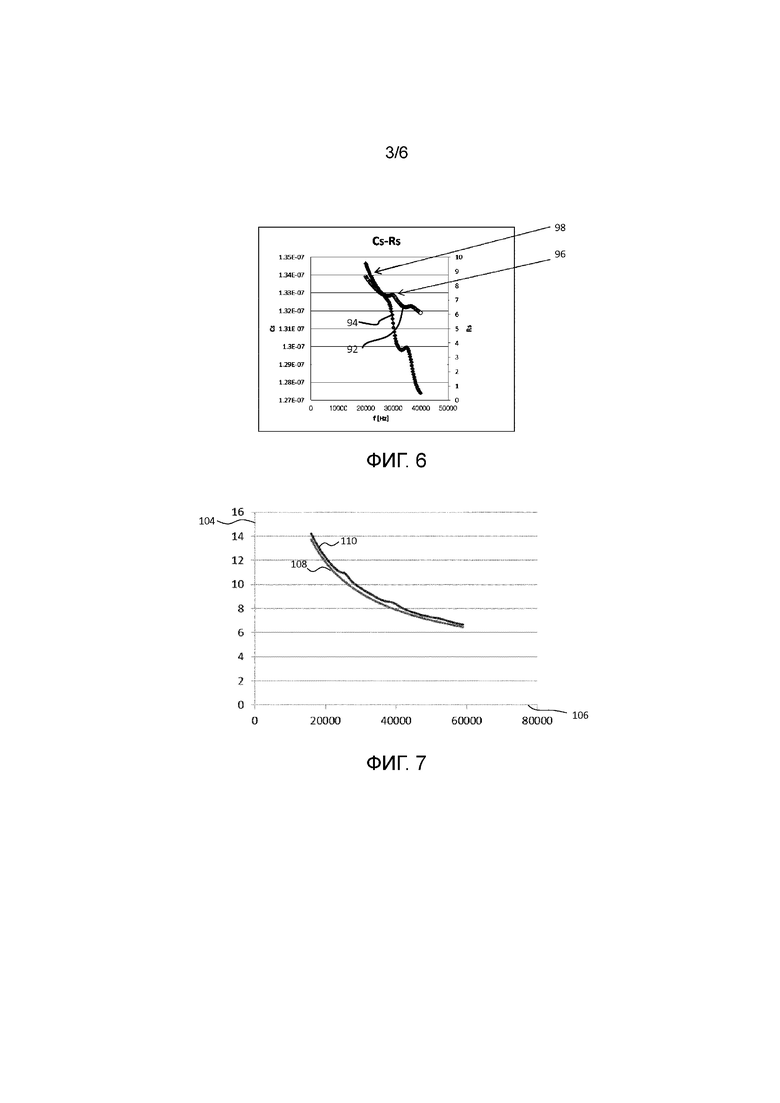
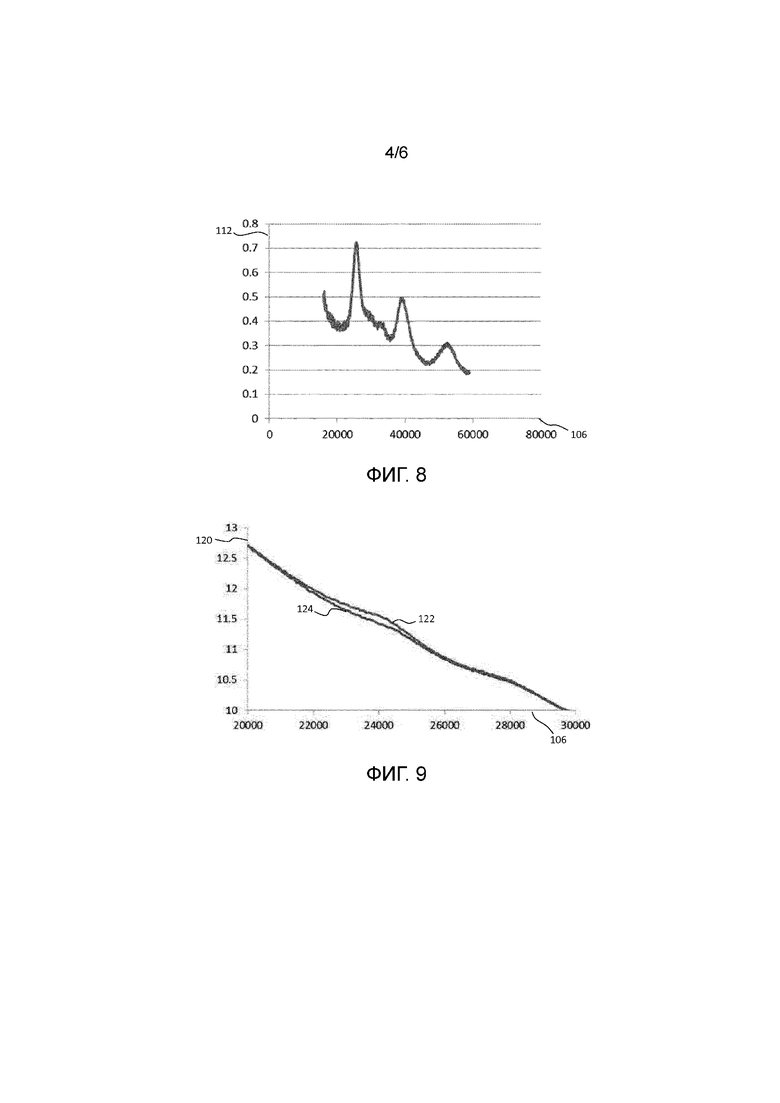

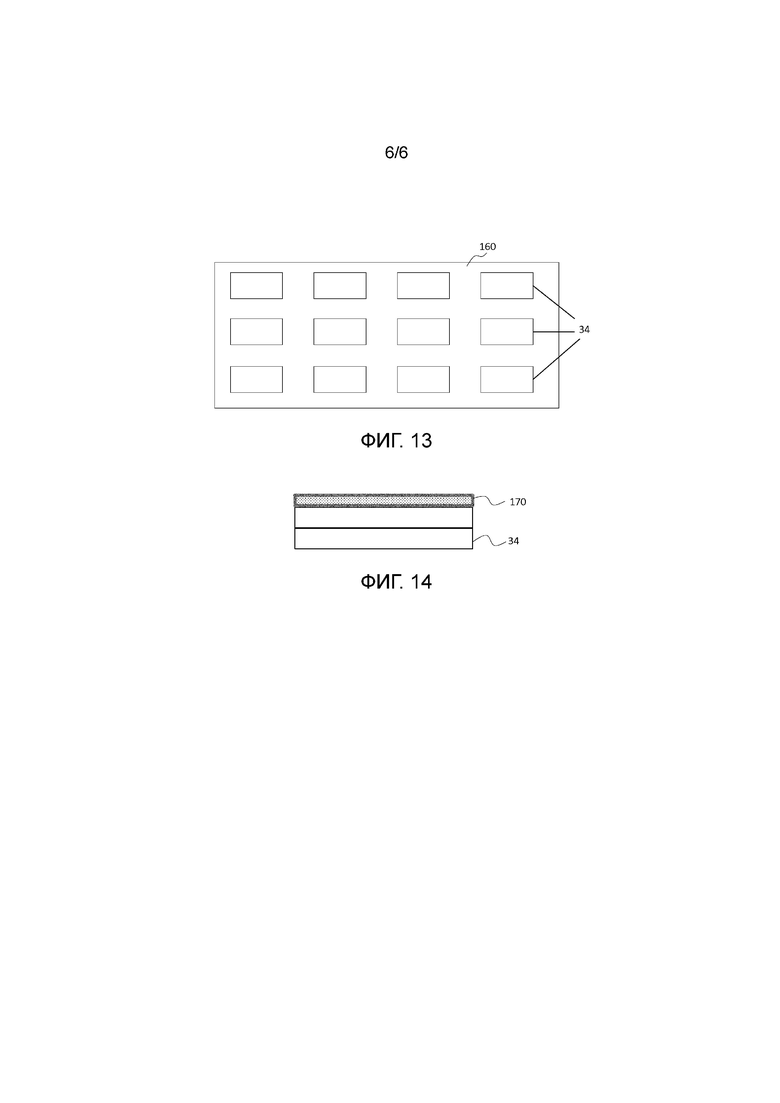
Группа изобретений относится к медицине, а именно к физиологическому сенсорному устройству для измерения физиологического параметра и управления расположением считывающей поверхности относительно воспринимающей поверхности ткани человека и способу настройки физиологического считывающего устройства для оптимизации расположения считывающей поверхности относительно воспринимающей поверхности ткани человека. Устройство содержит считывающую поверхность, электроактивную полимерную структуру, контроллер. Полимерная структура выполнена с возможностью деформации в ответ на подачу электрического сигнала для управления расположением считывающей поверхности. При осуществлении способа подают электрический сигнал на электроактивную полимерную структуру. Сигнал состоит из наложенного сигнала воздействия и считывающего сигнала переменного тока. Сигнал воздействия предназначен для стимулирования деформации электроактивной полимерной структуры для управления считывающей поверхностью для приложения силы воздействия к воспринимающей поверхности. Считывающий сигнал переменного тока предназначен для обеспечения измерения приложенного к воспринимающей поверхности давления и имеет частоту переменного тока, принадлежащую гармонике резонансной либо антирезонансной частоты электроактивной полимерной структуры. Измеряют импеданс электроактивной полимерной структуры по времени, для измерения и индикации возвратной силы, действующей на электроактивную полимерную структуру со стороны воспринимающей поверхности по времени. Регулируют величину приложенного сигнала воздействия в зависимости от измеренного импеданса и/или возвратной силы для регуляции расположения считывающей поверхности относительно воспринимающей поверхности. Достигается поддержание давления в месте контакта или расстояния между датчиком физиологических параметров и телом пользователя на постоянном уровне, что позволяет компенсировать артефакты движения и повысить точность полученных результатов измерений. 3 н. и 13 з.п. ф-лы, 14 ил.
1. Физиологическое сенсорное устройство для измерения по меньшей мере одного физиологического параметра и управления расположением считывающей поверхности относительно воспринимающей поверхности ткани человека, содержащее:
указанную считывающую поверхность;
электроактивную полимерную структуру (34), выполненную с возможностью деформации в ответ на подачу электрического сигнала, чтобы тем самым управлять расположением считывающей поверхности; и
контроллер (42), выполненный с возможностью:
предоставления электрического сигнала, состоящего из наложенного сигнала воздействия и считывающего сигнала переменного тока на электроактивную полимерную структуру (34),
причем сигнал воздействия предназначен для стимулирования деформации электроактивной полимерной структуры (34), чтобы тем самым управлять считывающей поверхностью для приложения силы воздействия к воспринимающей поверхности, а считывающий сигнал переменного тока предназначен для обеспечения измерения приложенного к воспринимающей поверхности давления и имеет частоту переменного тока, принадлежащую гармонике либо резонансной, либо антирезонансной частоты электроактивной полимерной структуры (34);
измерения импеданса, проявляемого электроактивной полимерной структурой (34), по времени, чтобы тем самым обеспечить измерение и индикацию возвратной силы, действующей на электроактивную полимерную структуру со стороны воспринимающей поверхности по времени, и
регулирования величины приложенного сигнала в зависимости от измеренного импеданса и/или возвратной силы, чтобы тем самым регулировать расположение считывающей поверхности относительно воспринимающей поверхности.
2. Сенсорное устройство по п.1, в котором контроллер (42) выполнен с возможностью регулирования величины сигнала воздействия, чтобы поддерживать постоянной силу воздействия, прикладываемую к воспринимающей поверхности, и/или таким образом, чтобы поддерживать постоянной возвратную силу, или их компонент, прикладываемый к считывающей поверхности.
3. Сенсорное устройство по п.1 или 2, в котором контроллер (42) выполнен с возможностью регулирования величины сигнала воздействия, чтобы поддерживать постоянным относительное расстояние между считывающей поверхностью и воспринимающей поверхностью и/или точкой или телом под воспринимающей поверхностью.
4. Сенсорное устройство по любому из предыдущих пунктов, в котором контроллер (42) выполнен с возможностью уменьшения величины сигнала воздействия в ответ на падение или рост значений импеданса и/или увеличения величины сигнала воздействия в ответ на рост или падение значений импеданса.
5. Сенсорное устройство по любому из предыдущих пунктов, в котором контроллер (42) выполнен с возможностью уменьшения величины сигнала воздействия в ответ на падение значений импеданса ниже или рост выше предопределенного порогового значения и/или увеличения величины сигнала воздействия в ответ на рост значений импеданса выше или падение ниже предопределенного порогового значения.
6. Сенсорное устройство по любому из предыдущих пунктов, дополнительно содержащее схему фильтра, выполненную с возможностью фильтрации измеренных значений импеданса, чтобы извлекать компонент силы реакции, представляющий силы, оказываемые внутренней упругостью воспринимающей поверхности, и/или физиологический компонент, представляющий силы, возникающие в результате по меньшей мере одного физиологического явления, и, при необходимости, при этом физиологический компонент представляет силы, связанные с кровяным давлением и/или сердечно-сосудистой пульсовой волной.
7. Сенсорное устройство по п.6, в котором контроллер (42) выполнен с возможностью регулирования величины сигнала воздействия в зависимости либо от компонента силы реакции, либо от физиологического компонента измеренных значений импеданса.
8. Сенсорное устройство по любому из предыдущих пунктов, в котором считывающая поверхность представляет собой электроактивную полимерную структуру (34) или считывающая поверхность представляет собой поверхность дополнительного считывающего компонента (140), скомпонованного в механическом взаимодействии с электроактивной полимерной структурой (34), выполненного с возможностью измерения по меньшей мере одного физиологического параметра.
9. Сенсорное устройство по любому из предыдущих пунктов, в котором контроллер (42) выполнен с возможностью подачи сигнала воздействия, который постоянно уменьшается по величине в течение предопределенного периода времени, и дополнительно выполнен с возможностью обработки измеренных значений импеданса в течение указанного периода времени для обнаружения и изменения колебательных изменений значения во времени, причем эти изменения указывают на колебания стенок кровеносных сосудов, вызванных кровяным давлением.
10. Сенсорное устройство по любому из предыдущих пунктов, содержащее массив электроактивных полимерных структур (34), каждая из которых независимо управляется контроллером (42) для управления расположением соответствующей считывающей поверхности, приложения силы воздействия в соответствующей точке к воспринимающей поверхности и измерения возвратной силы, действующей на воспринимающую поверхность в указанной точке.
11. Сенсорное устройство по любому из предыдущих пунктов, в котором электроактивная полимерная структура (34) и/или контроллер могут быть установлены на гибком носителе (160) для приложения к области воспринимающей поверхности.
12. Сенсорное устройство по любому из предыдущих пунктов, дополнительно содержащее слой пьезоэлектрического материала (170), механически сцепленного с электроактивной полимерной структурой и/или с воспринимающей поверхностью и электрически соединенного с контроллером, причем слой выполнен с возможностью измерения приложенной силы, действующей на него через воспринимающую поверхность.
13. Сенсорное устройство по любому из предыдущих пунктов, в котором электроактивная полимерная структура (34) содержит релаксорный сегнетоэлектрический полимер.
14. Сенсорное устройство по любому из предыдущих пунктов, в котором величина сигнала считывания составляет менее 10 процентов от величины сигнала воздействия.
15. Способ настройки физиологического считывающего устройства для оптимизации расположения считывающей поверхности относительно воспринимающей поверхности ткани человека, причем
устройство содержит:
указанную считывающую поверхность;
электроактивную полимерную структуру, выполненную с возможностью деформации в ответ на подачу электрического сигнала,
при этом способ включает в себя:
осуществление подачи электрического сигнала, состоящего из наложенного сигнала воздействия и считывающего сигнала переменного тока на электроактивную полимерную структуру, причем сигнал воздействия предназначен для стимулирования деформации электроактивной полимерной структуры, чтобы тем самым управлять считывающей поверхностью для приложения силы воздействия к воспринимающей поверхности, а считывающий сигнал переменного тока предназначен для обеспечения измерения приложенного к воспринимающей поверхности давления и имеет частоту переменного тока, принадлежащую гармонике либо резонансной, либо антирезонансной частоты электроактивной полимерной структуры;
измерение импеданса, проявляемого электроактивной полимерной структурой, по времени, чтобы тем самым обеспечить измерение и индикацию возвратной силы, действующей на электроактивную полимерную структуру со стороны воспринимающей поверхности по времени, и
регулирование величины приложенного сигнала воздействия в зависимости от измеренного импеданса, чтобы тем самым регулировать расположение считывающей поверхности относительно воспринимающей поверхности.
16. Машиночитаемый носитель, содержащий компьютерный программный продукт и реализованный на машиночитаемом носителе машиночитаемый код, причем машиночитаемый код сконфигурирован так, что, при исполнении подходящим компьютером или блоком обработки, компьютер или блок обработки должен выполнять способ по п.15.
| WO 2016096391 A1, 23.06.2016 | |||
| RU 2005123963 A, 10.02.2007 | |||
| US 2002130673 A1, 19.09.2002 | |||
| WO 2009072085 A2, 11.06.2009 | |||
| СПОСОБ ЭЛЕКТРОХИМИЧЕСКОЙ ОБРАБОТКИ НЕФТЕГАЗОВЫХ СКВАЖИН | 1993 |
|
RU2087692C1 |

