Изобретение относится к устройству для определения расстояния между, по меньшей мере, одной рабочей лопаткой и окружающей, по меньшей мере, одну рабочую лопатку стенкой машины для превращения кинетической энергии потока в механическую энергию, а также к применению устройства. Соответствующее устройство для контроля радиального или осевого зазора в турбинах и соответствующее применение устройства следуют из DE 19705769 А1.
Машины для превращения кинетической энергии потока в механическую энергию, как, например, паровые или газовые турбины, используются в технике в качестве тепловых двигателей для того, чтобы накопленную в газовом потоке энергию переводить в механическую энергию, в частности во вращательное движение. Чтобы обеспечить надежную работу подобных машин для превращения кинетической энергии потока в механическую энергию, стремятся, особенно во время работы и, следовательно, во время вращения рабочего колеса, установленного в машине для превращения кинетической энергии потока в механическую энергию, к тому, чтобы непрерывно контролировать рабочие лопатки рабочего колеса. При этом очень важно точное поддержание расстояния от вершин рабочих лопаток, то есть радиально самых крайних кромок рабочих лопаток до стенки, окружающей рабочие лопатки (радиальный зазор). По соображениям надежности радиальный зазор не должен снижаться ниже минимального радиального зазора; однако слишком большой радиальный зазор приводит к излишне низкому коэффициенту полезного действия. Наряду с радиальным зазором, особенно в случае рабочих колес, в которых ряды лопаток облицованы лопаточным бандажом, осевое расстояние до участков стенки является важным. Так как эти параметры изменяются из-за различных динамических факторов влияния, стремятся к непрерывному контролю радиального зазора и осевого зазора во время работы. Величина радиального зазора может, например, контролироваться с помощью емкостных зондов, которые позиционируются вплоть до касания вблизи вершин лопаток. Этим зондам, однако, свойственны ограничения по точности, разрешению по местоположению и сроку службы.
В DE 19705769 А1 предложено устройство для контроля радиального зазора и осевого зазора в машине для превращения кинетической энергии потока в механическую энергию. При этом применяется микроволновая радиолокационная система, которая содержит блок передачи и приема, от которого микроволны с постоянной частотой направляются по волноводу на рабочее колесо машины для превращения кинетической энергии потока в механическую энергию. При этом волновод проходит через корпус, который окружает рабочее колесо, и там закрепляется. Раскрыв волновода размещен очень близко над вершинами рабочих лопаток рабочего колеса, так что из отражения переданных микроволн можно определить, на каком расстоянии находится вершина рабочей лопатки от конца волновода и, тем самым, от стенки, окружающей рабочую лопатку. Определение осуществляется посредством оценки фазы отраженных микроволн. Определение расстояния осуществляется тем, что определяется разность фаз между излученными и отраженными микроволнами.
В зоне рабочего колеса внутри корпуса, особенно в газовых турбинах в процессе работы, могут иметь место экстремальные условия. При течениях со скоростями порядка 100 м/с и давлении газа в диапазоне 16 бар именно в газовых турбинах возникают температуры порядка 1200°С. Эти экстремальные условия могут, по меньшей мере, распространяться через волновод к подключенному к волноводу блоку передачи и приема и приводить к повреждению последнего.
В основе изобретения лежит задача предложить соответствующее устройство и применение устройства, при которых подключенные к волноводу приборы защищены от экстремальных условий, имеющих место в процессе работы машины для превращения кинетической энергии потока в механическую энергию.
Для решения этой задачи предложено устройство соответственно признакам независимого пункта 1 формулы изобретения.
В соответствии с этим устройство для определения расстояния между, по меньшей мере, одной рабочей лопаткой и окружающей, по меньшей мере, одну рабочую лопатку стенкой машины для превращения кинетической энергии потока в механическую энергию, которое имеет следующие элементы:
- волновод для направления электромагнитных волн с различными частотами и излучения электромагнитных волн с, по меньшей мере, одной частотой через, по меньшей мере, обращенное к рабочей лопатке отверстие волновода в направлении рабочей лопатки,
- по меньшей мере, одно средство для ввода электромагнитных волн с различными частотами в волновод,
- по меньшей мере, одно средство для приема отраженных составляющих электромагнитных волн, вводимых в волновод, и
- блок оценки для оценки принимаемых отраженных составляющих вводимых электромагнитных волн, включающий в себя средство для сравнения соответствующих фаз вводимых электромагнитных волн с фазами соответствующих отраженных составляющих вводимых электромагнитных волн, причем посредством блока оценки для каждой частоты определяется значение сравнения фаз и из сравнения значений сравнения фаз может определяться расстояние,
должно быть выполнено таким образом, что
- волновод снабжен герметизирующим элементом, который
- для электромагнитных волн с, по меньшей мере, одной частотой выполнен прозрачным,
- в направлении прохождения электромагнитных волн имеет две противолежащие поверхности.
Таким образом, волновод уплотнен посредством герметизации по отношению к зоне рабочих лопаток, в которой при работе машины для превращения кинетической энергии потока в механическую энергию имеют место экстремальные условия.
Таким образом, возможно осуществлять измерения расстояния с помощью электромагнитных волн, которые посредством волновода направляются в зону рабочих лопаток через стенку машины для превращения кинетической энергии потока в механическую энергию, не позволяя распространяться экстремальным условиям в зоне рабочих лопаток через волновод.
Предпочтительные варианты выполнения соответствующего изобретению устройства вытекают из зависимых пунктов, подчиненных пункту 1. При этом форма выполнения по пункту 1 может комбинироваться с признаками одного из подчиненных зависимых пунктов или, предпочтительно, с признаками из нескольких зависимых пунктов. В соответствии с этим, устройство, соответствующее изобретению, дополнительно может иметь следующие признаки:
- герметизирующий элемент может быть предусмотрен в зоне отверстия волновода. Тем самым обеспечивается максимально возможная защита для волновода и подключенных к волноводу приборов, например блока оценки;
- предпочтительным образом, по меньшей мере, одна из обеих поверхностей может быть выполнена выпуклой, причем электромагнитные волны с, по меньшей мере, одной частотой могут излучаться сфокусированным образом на рабочую лопатку. Тем самым возможно, в частности, вершину рабочей лопатки разрешать и в поперечном направлении, так что может определяться профиль вершин рабочих лопаток;
- предпочтительным образом, по меньшей мере, одна из обеих поверхностей может быть выполнена вогнутой, причем электромагнитные волны с, по меньшей мере, одной частотой могут излучаться рассеянным образом в направлении рабочей лопатки. И при этом варианте выполнения можно, в частности, разрешать в поперечном направлении вершину рабочей лопатки. При этом в блоке оценки при оценивании электромагнитных волн, рассеянных на вершине рабочей лопатки, применяется известный метод радиолокатора с синтезированной апертурой (SAR);
- также может быть выгодным, если обе противолежащие поверхности герметизирующего элемента выполнены плоскими и параллельными одна другой, причем герметизирующий элемент для электромагнитных волн, по меньшей мере, одной первой частоты выполнен отражающим, а для электромагнитных волн, по меньшей мере, одной второй частоты выполнен пропускающим. Герметизирующий элемент представляет собой со своими параллельными противолежащими, разнесенными на некоторое расстояние стенками резонатор с частотно-избирательными свойствами. В зависимости от расстояния между обеими поверхностями, только электромагнитные волны с определенными длинами волн - при этом расстояние между обеими поверхностями равно целому кратному половины длины волны - могут проходить через герметизирующий элемент. Электромагнитные волны с лежащими между ними длинами волн будут, напротив, отражаться от герметизирующего элемента. Если при оценке сравниваются друг с другом значения сравнения фаз отраженных от герметизирующего элемента составляющих и прошедших через герметизирующий элемент и отраженных на рабочих лопатках составляющих введенных электромагнитных волн, то можно определить температурно-скомпенсированное значение расстояния между рабочей лопаткой и окружающей рабочую лопатку стенкой турбины. Обусловленное температурой расширение волновода при этом компенсируется путем вычислений;
- может быть предпочтительным, если герметизирующий элемент имеет диэлектрическую постоянную ε в диапазоне от 6 до 20, в частности от 9 до 15. Так, можно, при низких технических затратах, на герметизирующем элементе оказывать влияние на ход лучей электромагнитных волн в волноводе посредством герметизирующего элемента. Если герметизирующий элемент выполнен как резонатор, то, помимо этого, гарантируется достаточно высокая отражательная способность поверхностей (то есть поверхностей резонатора) герметизирующего элемента;
- при этом может быть благоприятным, если герметизирующий элемент выполнен из керамики, в частности из Al2O3. Тем самым обеспечивается очень хорошая термостойкость герметизирующего элемента;
- благоприятным образом электромагнитные волны могут находиться в частотном диапазоне от 70 до 150 ГГц. Так как длины волн при этих частотах составляют около 4 мм и менее, за счет этого могут использоваться очень компактные волноводы, размеры поперечного сечения которых в типовом случае следует выбирать порядка величины направляемых длин волн.
Изобретение также относится к применению соответствующего изобретению устройства для определения расстояния между, по меньшей мере, одной рабочей лопаткой и окружающей, по меньшей мере, одну рабочую лопатку стенкой машины для превращения кинетической энергии потока в механическую, выполненной в виде газовой турбины.
При этом волновод может предпочтительным образом размещаться в канале охлаждения стенки. Тем самым для установки соответствующего изобретению устройства может использоваться один из множества каналов охлаждения, уже предусмотренных в стенке для охлаждения.
Предпочтительные, однако никоим образом не ограничивающие примеры выполнения изобретения поясняются ниже более подробно со ссылками на чертежи. Для наглядности чертежи приведены не в масштабе, и некоторые признаки показаны в схематичном изображении. В частности, на чертежах показано следующее:
фиг.1 - газовая турбина, соответствующая уровню техники, с частичным вырезом, в пространственном представлении;
фиг.2 - рабочая лопатка газовой турбины по фиг.1;
фиг.3 - схематичное представление соответствующего изобретению устройства с герметизирующим элементом, выполненным в виде резонатора;
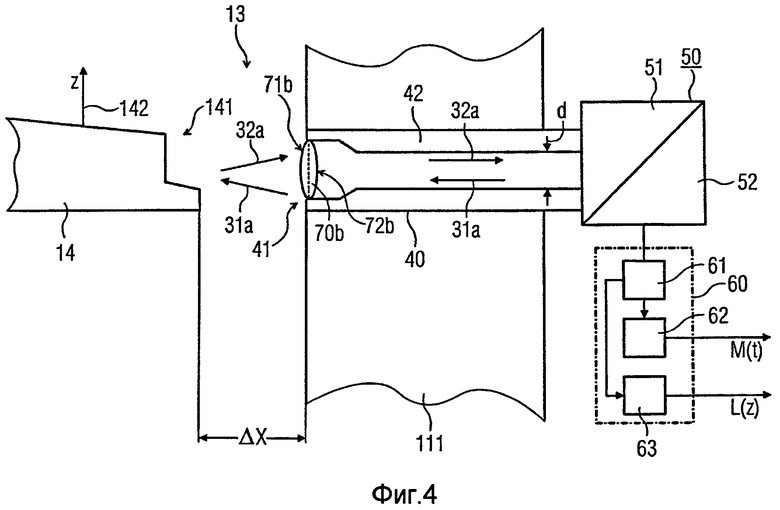
фиг.4 - схематичное представление соответствующего изобретению устройства с герметизирующим элементом, выполненным в виде линзы с выпуклыми поверхностями;
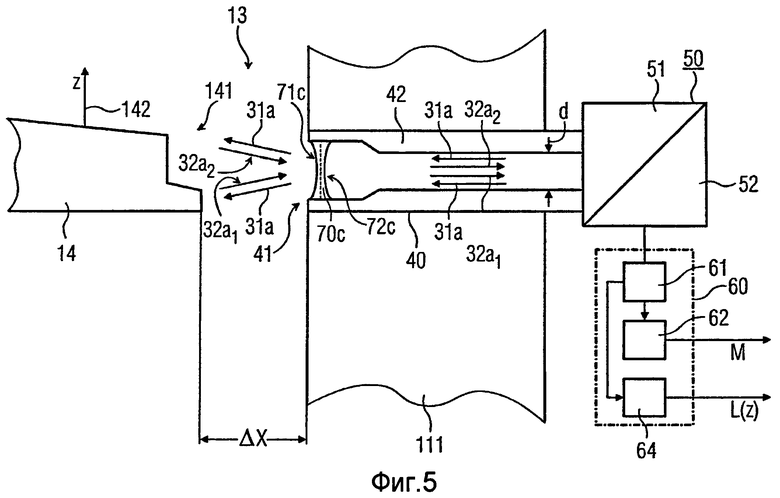
фиг.5 - схематичное представление соответствующего изобретению устройства с герметизирующим элементом, выполненным в виде линзы с вогнутыми поверхностями.
Соответствующие друг другу элементы на фиг.1-5 обозначены одинаковыми ссылочными позициями.
На фиг.1 показана газовая турбина 10, соответствующая уровню техники, которая спроектирована для температур входных газов около 1200°. В корпусе 11 с внутренней стенкой 111 газовая турбина 10 имеет вал 12 ротора, установленный с возможностью вращения, на котором установлены рабочие лопатки 14 в проточном канале 13.
На фиг.2 более детально показана такая рабочая лопатка 14 в демонтированном состоянии. Верхний конец рабочей лопатки 14, так называемая вершина 141 рабочей лопатки, в смонтированном состоянии обращен к внутренней стенке 111 корпуса 11 газовой турбины.
На фиг.3 показано схематичное представление соответствующего изобретению устройства в первом примере выполнения. Ради простоты схематично показана только часть рабочей лопатки 14. Стрелкой 142 обозначено, что рабочая лопатка 14 во время измерения расстояния при работе газовой турбины 10 движется в направлении стрелки 142. В первом приближении движение в направлении стрелки может рассматриваться как линейное движение в поперечном направлении z. Вершина 141 рабочей лопатки размещена на радиальном расстоянии Δх от внутренней стенки 111 корпуса 11 газовой турбины. Чтобы обеспечить по возможности хороший коэффициент полезного действия газовой турбины 10, расстояние Δх между концами рабочих лопаток 14, то есть вершинами 141 рабочих лопаток и внутренней стенкой 111 корпуса 11 газовой турбины, выбрано по возможности малым и в типовом случае лежит в диапазоне нескольких миллиметров, в частности от 1 до 20 мм. Стенка 111 имеет, по меньшей мере, одно отверстие, в которое установлен с геометрическим замыканием волновод 40. Предпочтительным образом волновод 40 размещен в одном из многочисленных, уже имеющихся в стенке 111 каналов охлаждения. Волновод 40 выполнен в форме трубы и имеет, например, круговое или прямоугольное поперечное сечение с внутренним диаметром d в диапазоне от 2 до 10 мм. Стенка 42 волновода 40 состоит в типовом случае из проводящего материала, например из стали. В частности, конец волновода 40, который снабжен отверстием 41, таким образом установлен в стенке 111, что он не выступает или выступает по возможности мало в проточный канал 13 газовой турбины 10, чтобы в минимальной степени оказывать влияние на поток газа в проточном канале 13. В области отверстия 41 волновода, согласно примеру выполнения по фиг.3, размещен герметизирующий элемент 70а с двумя параллельно друг другу расположенными плоскими поверхностями 71а, 72а с геометрическим замыканием с внутренним поперечным сечением волновода 40 внутри последнего. Герметизирующий элемент 70а уплотняет при этом волновод 40 по отношению к проточному каналу 13. Герметизирующий элемент 70а предпочтительным образом выполнен из керамики, по меньшей мере, частично прозрачной для электромагнитного излучения, в частности из Al2O3. Диэлектрическая постоянная ε керамики должна при этом лежать в диапазоне от 6 до 20, предпочтительно от 9 до 15. Другой конец волновода 40 подключен к блоку 50 передачи/приема, который имеет средства для ввода 51 и приема 52 электромагнитных волн 31а, 31b, 32a, 32b, в частности микроволн в частотном диапазоне от 70 до 150 ГГц. Блок 50 передачи/приема также соединен с блоком 60 оценки.
Более детально определение расстояния осуществляется следующим образом.
Блок 50 передачи/приема вводит электромагнитные волны 31а, 31b, например, с двумя различными частотами a и b в волновод 40. Предпочтительным образом обе частоты a и b отличаются максимально на 55% и минимально на 5%, так что электромагнитные волны 31а, 31b могут направляться одним и тем же волноводом 40. При этом в качестве средства 51 ввода может применяться двухчастотное средство 51 ввода или также два средства передачи с соответствующими частотами a и b, которые через разветвитель связаны с волноводом 40 (на чертежах не показано). Герметизирующий элемент 70а, ввиду своего выполнения с обеими параллельными плоскими поверхностями 71а, 72а, представляет собой резонатор для электромагнитного излучения 31а определенных частот а. Если расстояние между противолежащими поверхностями 71а, 72а, которые ориентированы в направлении распространения электромагнитных волн 31а, 31b в волноводе 40 (т.е. их нормали к поверхности совпадают с направлением распространения электромагнитных волн), равно кратному половины длины волны падающих на резонатор электромагнитных волн 31а, то они внутри резонатора многократно отражаются и, по меньшей мере, частично излучаются в направлении рабочей лопатки 14. Герметизирующий элемент 70а может, таким образом, рассматриваться как пропускающий (прозрачный) для электромагнитной волны с этой частотой а. Напротив, электромагнитные волны 31b с лежащей между ними частотой b уже от первой поверхности 72а герметизирующего элемента, на которую электромагнитные волны 31b падают после ввода в волновод 40, отражаются обратно к блоку 50 передачи/приема. Тем самым герметизирующий элемент 70а, согласно примеру выполнения по фиг.3, представляет собой частотно-селективный элемент, свойства передачи и отражения которого зависят от частоты.
Электромагнитные волны 31а с частотой а, согласно примеру выполнения по фиг.3, передаются через герметизирующий элемент 70а, в то время как электромагнитные волны 31b с частотами b отражаются назад к блоку 50 передачи/приема. Прошедшие волны 31а затем излучаются через отверстие 41 волновода в направлении рабочей лопатки 14. После прохождения расстояния Δх, по меньшей мере, часть 32а излученных электромагнитных волн 31а отражается от вершин 141 рабочих лопаток к волноводу 40, пересекает вновь герметизирующий элемент 70а в противоположном направлении и затем подается по волноводу 40 к блоку 50 передачи/приема. Посредством, например, приемного диода в качестве средства 52 для приема электромагнитных волн отраженная часть 32а, 32b излученных, например, двухчастотных электромагнитных волн 31а, 31b детектируется и преобразуется в соответствующие электрические сигналы, которые подаются на блок 60 оценки. Посредством блока 60 оценки из электрических сигналов сначала определяются значения фаз φra и φrb электромагнитных волн 32а, 32b, соответствующих обеим частотам a и b. Затем с помощью средства 61 сравнения фаз соответствующие фазы φ0a и φ0b излученных электромагнитных волн 31а, 31b сравниваются с фазами φra и φrb соответствующих отраженных составляющих 32а, 32b излученных электромагнитных волн 31а, 31b. Соответствующее значение сравнения фаз Δφa и Δφb, которое определяется, например, посредством значения разности фаз Δφa = φra - φ0а или Δφb = φrb - φ0b, при этом непосредственно зависит от расстояния, пройденного электромагнитными волнами 31а, 31b от средства 51 ввода. Наряду с подлежащим определению расстоянием Δх от вершины 141 рабочей лопатки до стенки 111 или до отверстия 41 волновода, также расстояние между герметизирующим элементом 70а и блоком 50 передачи/приема, ввиду температурно-зависимого расширения стенки 111 и, тем самым, также волновода 40, может варьироваться в зависимости от температуры, так что желаемое определение расстояния становится неточным. Посредством сравнения, например, путем вычитания значений сравнения фаз Δφa и Δφb отраженных от вершин 141 рабочих лопаток частей 32а излученных электромагнитных волн 31а, 31b с отраженными от герметизирующего элемента частями 32b можно скомпенсировать эту обусловленную температурой неточность. Это полученное таким образом значение сравнения фаз Δφab затем, с помощью другого средства 62 установления соответствия, соотносится с измеренным значением М для расстояния Δх между вершиной 141 рабочей лопатки и стенкой 111. Это установление соответствия может осуществляться, например, с помощью таблицы значений или подходящего алгоритма.
Определенное измеренное значение М для расстояния Δх для, по меньшей мере, одной рабочей лопатки 14 передается через не показанные на чертеже блоки индикации и оповещения на пункт контроля или на центральный пульт управления.
Блок 60 оценки может также быть снабжен функцией сравнения, с помощью которой можно установить спадание ниже предварительно заданного порогового значения расстояния. Так можно, например, при снижении ниже порогового значения автоматически выдать оповещение, чтобы ввести подходящие защитные меры, например отключение газовой турбины 10.
На фиг.4 и фиг.5 схематично представлены два других примера выполнения соответствующего изобретению устройства. Они во многом соответствуют примеру выполнения по фиг.3. В нижеследующем описании будут представлены только отличия.
В обоих примерах выполнения герметизирующий элемент 70b, 70c в зоне отверстия 41 волновода выполнен с изогнутыми с обеих сторон поверхностями 71b, 72b, 71c, 72c. В то время как на фиг. 4 обе поверхности 71b, 72b являются выпукло изогнутыми, герметизирующий элемент по фиг. 5 имеет две вогнутые поверхности 71c, 72c. В обоих случаях герметизирующий элемент 70b, 70c выполняет функцию линзы для электромагнитных волн 31а, вводимых от блока 50 передачи/приема в волновод 40.
Посредством герметизирующего элемента 70b с выпукло изогнутыми поверхностями 71b, 72b, согласно фиг.4, возможно электромагнитные волны 31а, вводимые в волновод 40, фокусировать на вершине 141 рабочей лопатки. При этом при оценке электромагнитных волн 32а, обратно рассеянных от узко ограниченной, определяемой фокусом зоны на вершине 141 рабочей лопатки, определяется расстояние Δх относительно этой зоны. Так как в следующем за этим временном окне рабочая лопатка 14 при работе газовой турбины 10 движется в направлении z стрелки, ввиду профилирования вершины 141 рабочей лопатки, в этом следующем временном окне расстояние Δх варьируется в зависимости от профилирования.
С помощью упомянутого выше для примера приемного диода в качестве средства 52 для приема электромагнитных волн отраженная часть 32а излученных электромагнитных волн 31а детектируется и преобразуется в соответствующие электрические сигналы, которые подаются на блок 60 оценки. Посредством блока 60 оценки из электрических сигналов сначала определяется обусловленное профилем, зависимое от времени значение фазы φra(t) электромагнитных волн 32а. Затем с помощью средства 61 сравнения фаз постоянная фаза φ0a излученных электромагнитных волн 31а сравнивается с зависимым от времени значением фазы φra(t) электромагнитных волн 32а. Зависимое от времени значение сравнения фаз Δφa(t), которое, например, определяется значением разности фаз Δφa(t)=φra(t)-φ0a, является при этом непосредственно зависимым от пути, пройденного электромагнитными волнами 31а от средства 51 ввода. Это значение разности фаз Δφa(t) затем сопоставляется средством 62 установления соответствия с зависимым от времени измеренным значением М(t) для расстояния Δх между вершиной 141 рабочей лопатки и стенкой 111. Это сопоставление может осуществляться, например, с помощью таблицы значений или подходящего алгоритма.
Для определения профиля вершины рабочей лопатки блок 60 оценки имеет дополнительно средство 63 установления соответствия, посредством которого полученное зависимое от времени значение разности фаз Δφa(t) соотносится с разрешенным по местоположению профилем L(z) вершины рабочей лопатки в поперечном направлении z.
Посредством герметизирующего элемента 70c с вогнуто изогнутыми поверхностями 71c, 72c, согласно фиг.5, можно введенные в волновод 40 электромагнитные волны 31а излучить рассеянным образом в направлении вершины 141 рабочей лопатки. Тем самым при оценке электромагнитных волн 32а, рассеянных от вершины 141 рабочей лопатки, определяется расстояние Δх. Ввиду профилирования вершины 141 рабочей лопатки, в совокупности всех обратно рассеянных составляющих волн 32ai (i = натуральное число; на фиг.5: i = 1, 2) возникают различные значения фаз φrai для обратно рассеянных составляющих электромагнитных волн 32ai. Из этой обусловленной профилированием разности фаз рассеянных составляющих электромагнитных волн 32ai можно сделать вывод о профиле вершины 141 рабочей лопатки.
С помощью упомянутого выше для примера приемного диода в качестве средства 52 для приема электромагнитных волн отраженная составляющая 32ai излученных электромагнитных волн 31а детектируется и преобразуется в соответствующие электрические сигналы, которые подаются на блок 60 оценки. Посредством блока 60 оценки из электрических сигналов сначала определяется обусловленный профилем, зависимый от времени ансамбль i значений фазы φrai электромагнитных волн 32ai. Затем с помощью средства 61 сравнения фаз постоянная фаза φ0a излученных электромагнитных волн 31а сравнивается с различными фазами φrai отраженной составляющей 32ai. Различные значения сравнения фаз Δφai, которые, например, определяются значениями разности фаз Δφai=φrai-φ0a, являются при этом непосредственно зависимыми от пути, пройденного электромагнитными волнами 31а от средства 51 ввода. Эти значения сравнения разности фаз Δφai затем сопоставляются средством 62 установления соответствия с измеренным значением М для расстояния Δх между вершиной 141 рабочей лопатки и стенкой 111. Это сопоставление может осуществляться, например, с помощью таблицы значений или подходящего алгоритма.
Для определения профиля вершины рабочей лопатки применяется известный способ радиолокатора с синтезированной апертурой (SAR). Для этого блок 60 оценки дополнительно содержит другое средство 64 установления соответствия, с помощью которого полученные зависимые от профиля значения сравнения разности фаз Δφai затем ставятся в соответствие разрешенному по местоположению профилю L(z) вершины рабочей лопатки в поперечном направлении z.
Заявленное изобретение не ограничивается представленными примерами выполнения. Также в объем защиты входит то, что также несколько волноводов 40 предусматриваются для излучения и/или приема, чтобы, например, реализовать избыточность измерения или достичь более высокой точности.

Устройство для определения расстояния (Δх) между, по меньшей мере, одной рабочей лопаткой (14) и окружающей, по меньшей мере, одну рабочую лопатку (14) стенкой (111) машины (10) для превращения кинетической энергии потока в механическую энергию содержит волновод (40) для направления электромагнитных волн (31a, 31b, 32a, 32b) с различными частотами и излучения электромагнитных волн (31а) с, по меньшей мере, одной частотой через, по меньшей мере, одно обращенное к рабочей лопатке (14) отверстие (41) волновода в направлении рабочей лопатки (14), по меньшей мере, одно средство (51) для ввода электромагнитных волн (31а, 31b) с различными частотами в волновод (40) и, по меньшей мере, одно средство (52) для приема отраженных составляющих (32a, 32b) электромагнитных волн (31а, 31b), вводимых в волновод (40). Кроме того, устройство содержит блок (60) оценки для оценки принимаемых отраженных составляющих (32a, 32b) вводимых электромагнитных волн (31а, 31b). Блок (60) оценки включает в себя средство (61) для сравнения соответствующих фаз вводимых электромагнитных волн (31а, 31b) с фазами соответствующих отраженных составляющих (32a, 32b) вводимых электромагнитных волн, причем посредством блока оценки для каждой частоты определяется значение сравнения фаз и из сравнения значений сравнений фаз может определяться расстояние (Δх). При этом волновод (40) снабжен герметизирующим элементом (70а), который для электромагнитных волн (31b, 32b) одной первой частоты выполнен отражающим, а для электромагнитных волн (31а, 32a) одной второй частоты выполнен пропускающим, и имеет две противолежащих поверхности (71а, 72а). Технический результат - защита подключенных к волноводу приборов от экстремальных условий, имеющих место в процессе работы машины, определение расстояния между одной рабочей лопаткой и окружающей одну рабочую лопатку стенкой машины для превращения кинетической энергии потока в механическую энергию. 2 н. и 5 з.п. ф-лы, 5 ил.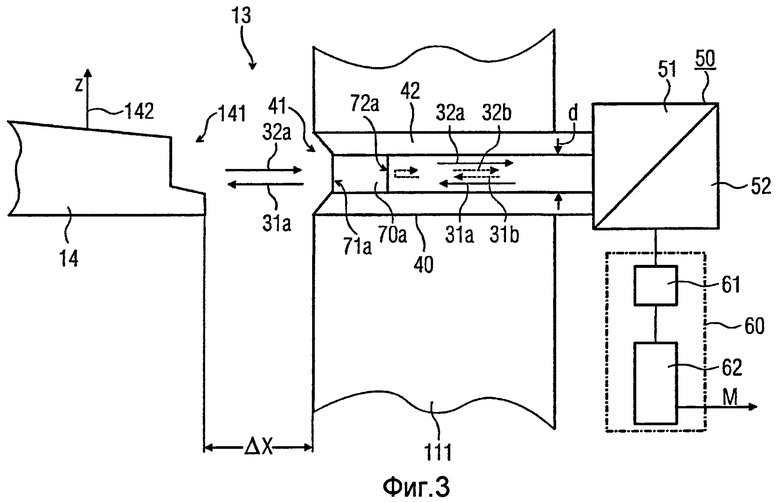
1. Устройство для определения расстояния (Δх) между, по меньшей мере, одной рабочей лопаткой (14) и окружающей, по меньшей мере, одну рабочую лопатку (14) стенкой (111) машины (10) для превращения кинетической энергии потока в механическую энергию, которое имеет следующие элементы:
волновод (40) для направления электромагнитных волн (31а, 31b, 32а, 32b) с различными частотами и излучения электромагнитных волн (31а) с, по меньшей мере, одной частотой через, по меньшей мере, обращенное к рабочей лопатке (14) отверстие (41) волновода в направлении рабочей лопатки (14),
по меньшей мере, одно средство (51) для ввода электромагнитных волн (31a, 31b,) с различными частотами в волновод (40),
по меньшей мере, одно средство (52) для приема отраженных составляющих (32а, 32b) электромагнитных волн (31а, 31b), вводимых в волновод (40), и
блок (60) оценки для оценки принимаемых отраженных составляющих (32а, 32b) вводимых электромагнитных волн (31а, 31b), включающий в себя средство (61) для сравнения соответствующих фаз вводимых электромагнитных волн (31а, 31b) с фазами соответствующих отраженных составляющих (32а, 32b) вводимых электромагнитных волн (31а, 31b), причем посредством блока оценки для каждой частоты может определяться значение сравнения фаз, и из сравнения значений сравнения фаз может определяться расстояние (Δх), причем волновод (40) снабжен герметизирующим элементом (70а, 70b, 70с), который
для электромагнитных волн (31а, 32а) с, по меньшей мере, одной частотой выполнен прозрачным, и
в направлении прохождения электромагнитных волн (31а, 31b, 32а, 32b) имеет две противолежащих поверхности (71а, 71b, 71с, 72а, 72b, 72с), отличающееся тем, что
обе противолежащие поверхности (71а, 72а) герметизирующего элемента (70а) выполнены плоскими и параллельными одна другой, причем герметизирующий элемент (70а) для электромагнитных волн (31b, 32b), по меньшей мере, одной первой частоты выполнен отражающим, а для электромагнитных волн (31а, 32а), по меньшей мере, одной второй частоты выполнен пропускающим, и
посредством блока (60) оценки из сравнения значений сравнения фаз отраженных от герметизирующего элемента составляющих и прошедших через герметизирующий элемент и отраженных на рабочих лопатках составляющих введенных электромагнитных волн может определяться температурно-скомпенсированное расстояние (Δх).
2. Устройство по п.1, отличающееся тем, что герметизирующий элемент (70а, 70b, 70с) предусмотрен в зоне отверстия (41) волновода.
3. Устройство по п.1 или 2, отличающееся тем, что герметизирующий элемент (70а, 70b, 70с) имеет диэлектрическую постоянную ε в диапазоне от 6 до 20.
4. Устройство по п.3, отличающееся тем, что герметизирующий элемент (70а, 70b, 70с) выполнен из керамики, в частности из Аl2О3.
5. Устройство по п.1, отличающееся тем, что электромагнитные волны (31а, 31b, 32а, 32b) являются миллиметровыми волнами, в особенности, в частотном диапазоне от 70 ГГц до 150 ГГц.
6. Применение устройства по любому из предыдущих пунктов для определения расстояния (Δх) между, по меньшей мере, одной рабочей лопаткой (14) и окружающей, по меньшей мере, одну рабочую лопатку (14) стенкой (111) машины (10) для превращения кинетической энергии потока в механическую энергию, выполненной в виде газовой турбины.
7. Применение по п.6, отличающееся тем, что волновод (40) размещен в канале охлаждения стенки (111).
| US 2004263383 A1, 30.12.2004 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗАЗОРА ДО ВЕРШИН ЛОПАТОК ТУРБИНЫ | 2002 |
|
RU2237866C2 |
| GB 2055269 В, 25.02.1981 | |||
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕХАНИЧЕСКИХ ВОЗДЕЙСТВИЙ | 1992 |
|
RU2063001C1 |
| DE 19705769 A1, 20.08.1998. | |||

