Настоящее изобретение относится к датчику скорости вращения, который содержит подложку и две отдельные структуры, выполненные с возможностью перемещения относительно подложки на рабочей плоскости, которые при соединении образуют связанную структуру, такую, что она имеет первую моду колебаний со смещениями в противофазе подвижных структур в первом направлении на рабочей плоскости в качестве моды возбуждения и вторую моду колебаний в качестве моды детектирования, которая возбуждается ускорениями Кориолиса при возбуждении первой моды колебаний и при вращении относительно оси чувствительности, расположенной под прямым углом к рабочей плоскости датчика скорости вращения, а также имеет резонансную частоту детектирования.
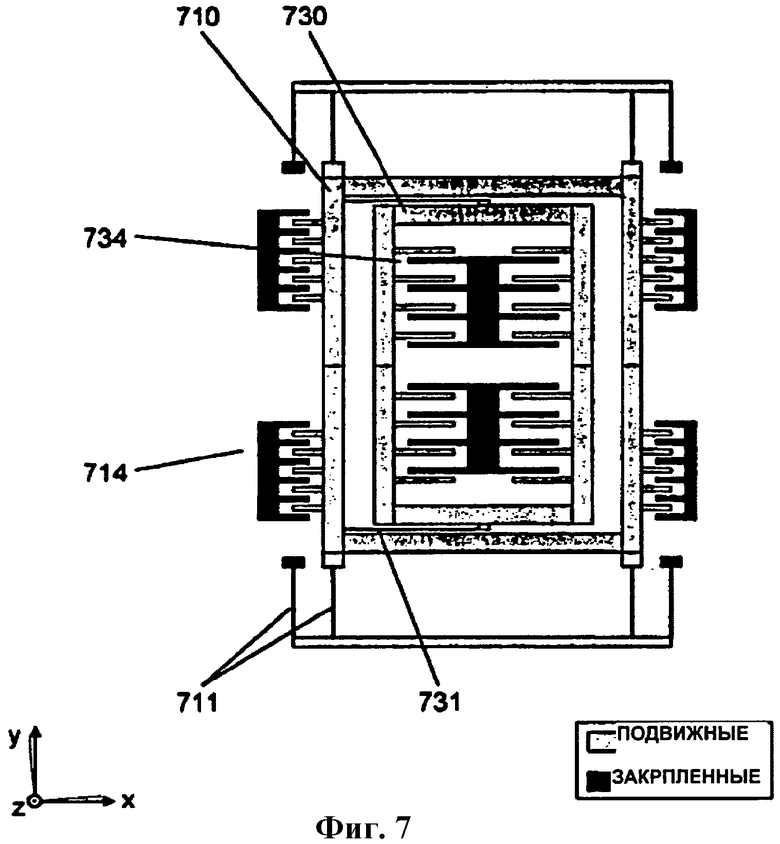
Из документов WO 2005/066585 А1, WO 2005/066584 А1 и US 6705164 известны датчики скорости вращения (показанные посредством примера на фиг.7), которые содержат модуль 710 возбуждения, эталонную массу 730 и подложку, связанные между собой упругими элементами 711, 731, такими, что, приблизительно, модуль 710 возбуждения может перемещаться относительно подложки только в направлении первой оси (оси х), а эталонная масса 730 может перемещаться относительно модуля 710 возбуждения только в направлении второй оси (оси y), расположенной под прямым углом к первой оси (х). Обе оси расположены на плоскости подложки, т.е. структуры не могут совершать перемещения под прямым углом к подложке в пределах производственных допусков. Датчики силы и ответвители, за счет которых может быть выполнено приложение сил и измерение перемещений в направлении оси z, не требуются. Это означает, что для изготовления структур могут быть также использованы способы, которые не обеспечивают возможность изготовления таких датчиков силы оси z и ответвителей оси z. При работе датчика скорости вращения, выполненного в виде Кориолисова гироскопа, модуль 710 возбуждения возбуждает первое колебание в направлении первой оси (х) (режим возбуждения). В этом случае эталонную массу 730 перемещают в этом направлении (приблизительно) с той же амплитудой и фазой, что и модуль 710 возбуждения. Модули 710 возбуждения снабжены датчиками силы и ответвителями 714, с помощью которых возбуждается мода возбуждения в наиболее предпочтительном рабочем режиме при резонансной частоте и амплитуде скорости, регулируемой при постоянном значении.
При повороте Кориолисова гироскопа относительно оси (z) под прямым углом к плоскости подложки Кориолисовы силы воздействуют на отдельные структуры в направлении второй оси (y). Благодаря вышеописанным степеням свободы перемещения Кориолисовы силы могут вызывать отклонение только эталонной массы 730. В этом случае эталонная масса 730 совершает колебания в направлении второй оси (y), что далее в описании именуется модой детектирования. Амплитуда или отклонение результирующих колебаний эталонной массы 730 могут быть использованы в качестве измеримой переменной. Для этого необходимы соответствующие ответвители 734, например электроды на эталонной массе 730, при этом противоположные электроды закреплены на подложке. В качестве варианта, Кориолисовы силы могут быть восстановлены. Для этой цели необходимы датчики силы, посредством которых силы могут быть приложены к эталонной массе 730 (см., например, описанную выше схему расположения электродов, в которой функционирование ответвителя и функционирование датчика силы могут быть обеспечены выборочно через общие или отдельные электроды). Следовательно, амплитуда восстанавливающей силы является мерой угловой скорости.
В приведенных выше документах также показано, как можно в каждом случае расположить два элемента гироскопа, как описано выше, рядом друг с другом на общей подложке и соединить два привода и/или две эталонные массы дополнительными упругими элементами.
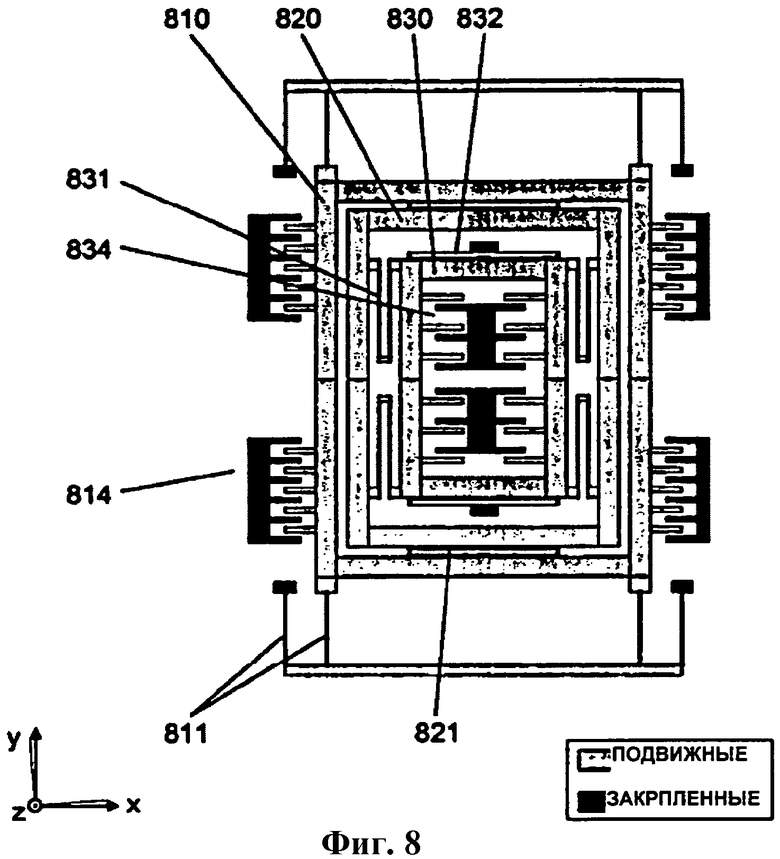
В документах WO 02/16871 А1 и US 6691571 В2 дано описание гироскопов в виде датчиков скорости вращения (показанных посредством примера на фиг.8), которые содержат модуль 810 возбуждения, элемент 820, основанный на эффекте Кориолиса, модуль 830 регистрации и подложку, которые соединены упругими элементами 811, 821, 831, 832, такими, что, приблизительно, модуль 810 возбуждения может перемещаться относительно подложки только в направлении первой оси (оси х), модуль 830 регистрации может перемещаться относительно подложки только в направлении второй оси (оси Y), расположенной под прямым углом к первой оси (х), и элемент 820, основанный на эффекте Кориолиса, может перемещаться относительно модуля 810 возбуждения только в направлении второй оси (y) и относительно модуля 830 регистрации только в направлении первой оси (х). Обе оси расположены на плоскости подложки, т.е. структуры не могут совершать перемещения под прямым углом к подложке в пределах производственных допусков. Датчики силы и ответвители, за счет которых может быть выполнено приложение сил и измерение перемещений в направлении оси z, не требуются. Это означает, что для изготовления структур могут быть также использованы способы, которые не обеспечивают возможность изготовления таких датчиков силы оси z и ответвителей оси z.
Для работы Кориолисова гироскопа модуль 810 возбуждения возбуждает первое колебание в направлении первой оси (х) (мода возбуждения). Перемещение элемента 820, основанного на эффекте Кориолиса, в этом случае осуществляется (приблизительно) с амплитудой и фазой, равными амплитуде и фазе модуля 810 возбуждения, при этом модуль 830 регистрации (приблизительно) в этом направлении не перемещается. Модули 810 возбуждения снабжены датчиками силы и ответвителями 814, с помощью которых вызывают моду возбуждения в наиболее предпочтительном рабочем режиме при резонансной частоте и амплитуде скорости, регулируемой при постоянном значении.
При повороте Кориолисова гироскопа относительно оси (оси z) под прямым углом к плоскости подложки Кориолисовы силы действуют на подвижные структуры в направлении второй оси (y). Благодаря вышеописанным степеням свободы перемещения Кориолисовы силы могут вызывать отклонение только элемента 820, основанного на эффекте Кориолиса (а не модуля 810 возбуждения), при этом модуль 830 регистрации также может быть перемещен. В этом случае элемент 820, основанный на эффекте Кориолиса, вместе с модулем 830 регистрации осуществляет колебания в направлении второй оси (y), что далее в описании именуется модой детектирования. Амплитуда результирующей моды детектирования может быть использована в качестве измеримой переменной. Для этого необходимы соответствующие ответвители 834, например электроды на модуле 830 регистрации, при этом противоположные электроды закреплены на подложке. В качестве варианта, Кориолисовы силы могут быть восстановлены. Для этой цели необходимы датчики силы, посредством которых силы могут быть приложены к моде детектирования (см., например, описанную выше схему расположения электродов, в которой функционирование ответвителя и функционирование датчика силы могут быть обеспечены выборочно через общие или отдельные электроды). Следовательно, амплитуда восстанавливающей силы является служить мерой угловой скорости.
В документах WO 02/16871 А1 и US 6691571 В2 также показано, как можно в каждом случае расположить два элемента гироскопа рядом друг с другом на общей подложке и соединить два привода, два элемента, основанных на эффекте Кориолиса, или два модуля регистрации дополнительными упругими элементами.
Однако во всех вариантах реализации изобретения в уровне техники эталонные массы и/или элементы, основанные на эффекте Кориолиса, а модули регистрации, относительно в большей степени, отклонены силами, создающими линейное ускорение, в направлении второй оси, если только эти силы не компенсированы восстанавливающими силами. Это "относительно большое" отклонение возможно за счет того, что описанные связанные структуры также обладают собственными модами (именуемыми далее в описании "линейной модой"), при которой эталонные массы и/или элементы, основанные на эффекте Кориолиса, и модули регистрации перемещаются синхронно в направлении второй оси, а резонансная частота этой линейной моды ниже резонансной частоты ω2 моды детектирования.
Выражение "относительно большой" означает, что, при установившемся линейном ускорении α в направлении второй оси, смещение х может быть любым - вплоть до нескольких процентов:
или больше (в этом случае ω2 - резонансная частота моды детектирования). Уравнение абсолютно справедливо для отдельных структур. В случае связанных структур без соединения эталонных масс и/или элементов, основанных на эффекте Кориолиса / модулей регистрации, могут иметься две независимые моды детектирования с несколько различными резонансными частотами вследствие производственных допусков, и/или слабые связи (например, посредством элементов с твердотельной структурой, жесткость которых не является бесконечно большой) могут вызывать небольшие расщепления синфазного режима/противофазного режима.
Если соединение выполнено преднамеренно посредством дополнительных упругих элементов эталонных масс и/или элементов, основанных на эффекте Кориолиса, и/или модулями регистрации, резонанс моды детектирования отдельных структур расщеплен на синфазный режим и противофазный режим. Противофазный режим соответствует моде детектирования и в соответствующих примерах в уровне техники всегда имеет более высокую резонансную частоту, чем синфазный режим. При этом смещение, зависящее от ускорения, будет больше значения, определяемого уравнением (1).
Без вышеупомянутого восстановления сил, создающих линейные ускорения, могут возникать ошибки выходного сигнала, зависящие от ускорения. В случае двух связанных модулей гироскопа эти ошибки могут быть компенсированы, хотя и частично. Восстановление уменьшает сигналы ошибки, но требует наличия соответствующим образом выполненных датчиков силы. Например, в случае электростатических датчиков силы требуемый размер электродов и/или требуемое значение электрических напряжений могут оказать неблагоприятное воздействие на механические характеристики элемента датчика и/или на электронную часть (число компонентов, потеря мощности, физический размер).
Структуры микромеханических гироскопов, которые имеют две соединенные эталонные массы и в которых мода возбуждения и мода детектирования соответствуют линейным колебаниям в противофазе этих двух эталонных масс на плоскости подложки, известны из M.F.Zaman, A.Sharma, and F.Ayazi, "High Performance Matched-Mode Tuning Fork Gyroscope", Proc. IEEE Micro Electromechanical Systems Workshop (MEMS 2006), Istanbul, Turkey, январь, 2006, стр.66-69). В первом приближении, резонансные частоты моды детектирования и линейной моды идентичны, другими словами линейные ускорения вызывают относительно большое смещение эталонной массы, которое приводит к сигналам ошибки.
Известны структуры микромеханических гироскопов (Р.Greiff, В. Вохеnhorn, Т.King, and L.Niles, "Silicon Monolithic Micromechanical Gyroscope", Tech Digest, 6th Int Conf. on Solid-State Sensors and Actuators (Transducers ′91), San Francisco, CA, USA, июнь 1991, стр.966-968, или J.Bernstein, S.Cho, A.T.King, A.Kourepins, P. Maciel, and M.Weinberg, A Micromachined Comb-Drive Tuning Fork Rate Gyroscope, Proc IEEE Micro Electromechanical Systems Workshop (MEMS 93), Fort Lauderdale, FL, USA, февраль 1993, стр.143-148 или DE 19641284), мода детектирования которых соответствует крутильным колебаниям. Таким образом, могут быть созданы структуры, имеющие резонансную частоту линейной моды значительно выше резонансной частоты ω2 моды детектирования. Ввиду этого вышеупомянутые ошибки, зависящие от ускорения, могут быть в значительной степени подавлены. Однако известные структуры требуют наличия датчиков силы и/или ответвителей, с помощью которых могут быть приложены силы в направлении z, и могут быть измерены перемещения в направлении оси z.
Документ WO 95/34798 описывает датчики ускорения, чья мода детектирования соответствует крутильным колебаниям относительно вертикальной оси z.
Во всех вариантах реализации в документах WO 2005/066585 А1, WO 2005/066584 А1, US 6705164 B2, WO 02/16871 А1 и US 6691571 B2 с двумя связанными структурами гироскопа, для которых связаны только два модуля возбуждения (а не эталонные массы или элемент, основанный на эффекте Кориолиса / модули регистрации), резонансные частоты двух эталонных масс и/или двух элементов, основанных на эффекте Кориолиса, вместе с соответствующими модулями регистрации, расщеплены вследствие производственных допусков. Для обеспечения высокой точности микромеханического гироскопа должна быть достигнута высокая добротность мод детектирования. При этом ширина резонанса (или ширина на уровне 3 дБ) мод детектирования может быть более узкой, чем расщепление двух резонансных частот. Для выполнения так называемой двухрезонансной операции, с помощью которой могут быть обеспечены высокие точности, при которых резонансная частота моды детектирования должна соответствовать резонансной частоте моды возбуждения, обе моды детектирования должны быть настроены отдельно. В случае электронной настройки обе моды детектирования должны быть выявлены и настроены, что примерно вдвое усложняет применяемую электронную часть.
Задачей изобретения является определение датчика скорости вращения, в котором, даже без восстановления, в значительной степени предотвращено смещение эталонной массы и/или элемента, основанного на эффекте Кориолиса, и модуля регистрации в случае линейного ускорения в направлении второй оси. Кроме того, должна отсутствовать необходимость в датчиках силы и/или ответвителях, с помощью которых могут быть приложены силы в направлении z, и могут быть измерены перемещения в направлении оси z. К тому же необходимо обеспечить механическую структуру, в которой нужно выявить (и управлять) только одну моду детектирования, даже при наличии строгих требований по точности и высокой добротности колебаний.
Эта задача может быть решена посредством датчика скорости вращения, имеющего отличительные признаки п.1 формулы изобретения.
Датчик скорости вращения содержит подложку и две отдельные структуры, выполненные с возможностью перемещения относительно подложки на рабочей плоскости. Между двумя подвижными отдельными структурами предусмотрена связь, которая обеспечивает следующие особенности:
- связанная структура имеет первую моду колебаний со смещениями в противофазе отдельных подвижных структур в первом направлении рабочей плоскости (мода возбуждения),
- связанная структура имеет вторую моду колебаний, которая может быть возбуждена ускорениями Кориолиса при возбуждении первой моды колебаний и вращении относительно оси чувствительности, расположенной под прямым углом к рабочей плоскости датчика скорости вращения (мода детектирования),
- при идеальных предварительных условиях (т.е., например, при бесконечно большой жесткости элементов массы, идеальных упругих структурах (например, упругие стержни, жесткость которых бесконечна в продольном направлении) и ничтожно малых производственных допусках), связанная структура не имеет моды колебаний, которая может быть возбуждена линейными ускорениями в направлении, параллельном второй оси.
В реальных условиях необходимо, чтобы резонансная частота этой линейной моды значительно превышала резонансную частоту моды детектирования, например, в 1,4 раза.
Такую моду детектирования получают преимущественно с помощью вращающегося упругого элемента, который соединяет две отдельные структуры друг с другом.
Вращающийся упругий элемент сформирован из изогнутых балок и крепления на подложке симметрично относительно оси симметрии, причем вращающийся упругий элемент выполнен так, что он является податливым при кручении относительно оси симметрии и жестким при всех других нагрузках.
В одном из вариантов реализации изобретения отдельные структуры содержат колеблющиеся тела, которые соединены посредством вращающегося упругого элемента. Это усовершенствование представляет интерес при использовании датчиков силы и/или ответвителей для моды возбуждения, силы и сигналы которых не зависят от перемещения при детектировании, и/или при использовании ответвителей и/или датчиков силы для моды детектирования, которая не зависит от перемещения при возбуждении.
Мода детектирования представляет собой линейные колебания в противофазе или комбинацию линейных колебаний в противофазе и крутильных колебаний.
В этом случае предложены упругие элементы, вращающиеся относительно оси х. Упругие элементы, вращающиеся относительно оси х, имеют характеристику соединения, которая в то же самое время допускает относительное вращение и изменение расстояния в направлении оси х между двумя их точками приложения. Этот упругий элемент, вращающийся относительно оси х, позволяет преобразовывать вращательные движения в линейные перемещения.
В качестве примера, отдельные структуры содержат модули возбуждения и эталонные массы, причем модули возбуждения могут перемещаться в первом направлении, эталонные массы соединены с модулями возбуждения посредством упругих элементов таким образом, что их перемещение относительно модулей возбуждения может быть обеспечено только параллельно подложке и под прямым углом к первому направлению, а эталонные массы соединены через вращающийся упругий элемент. Этот датчик скорости вращения представляет особый интерес при использовании ответвителей и/или датчиков силы для моды детектирования, которая не зависит от перемещения при возбуждении.
В предпочтительном варианте датчика скорости вращения отдельные структуры содержат модули возбуждения, элементы, основанные на эффекте Кориолиса, и модули регистрации, при этом модули возбуждения связаны через упругие элементы, а модули регистрации связаны через вращающийся упругий элемент. Использование упругих относительно оси y элементов для крепления модулей регистрации на подложке предотвращает совместное выполнение модулями регистрации крутильных колебаний, а следовательно, предотвращает изменение расстояния между пластинами пластинчато-конденсаторных конструкций, позиционно-зависимых в случае их использования в качестве ответвителей для моды детектирования. Кроме того, сигналы ошибки не могут быть определены, если производственные допуски вызывают образование углов рассогласования между перемещением при возбуждении и ответвителями для моды детектирования.
Согласно еще одному варианту реализации пластинчато-конденсаторные конструкции с изменением расстояния между пластинами в качестве ответвителя для моды детектирования отличаются тем, что приложение электрического напряжения вызывает изменение резонансной частоты моды детектирования. Это свойство может быть использовано специально для регулирования частоты (для удвоения резонанса).
Согласно еще одному варианту реализации электростатические двигатели в качестве ответвителя моды детектирования предотвращают модуляции резонансной частоты, которые возникают в случае пластинчато-конденсаторных конструкций под влиянием модулирующих сигналов для функционирования ответвителя или (зависящих от скорости вращения) восстанавливающих напряжений.
В настоящей заявке под терминами "электростатические двигатели" и "пластинчато-конденсаторные конструкции" понимают следующее:
- "электростатический двигатель" - структура с конденсаторами в виде пластин с "погруженными" электродами, т.е. перекрытие электродов изменяется. Как правило, с обеих сторон погруженного электрода выбирают одинаковые расстояния между электродами.
- "пластинчато-конденсаторная конструкция" представляет собой конструкцию из конденсаторов в форме пластин, в которой при перемещении происходит изменение расстояния между электродами. Возможно осуществление такой конструкции, с одной стороны, благодаря разности расстояний между электродами с обеих сторон подвижного электрода (если задача заключается только в расстройке частоты, можно выбрать одинаковое расстояние между электродами), а кроме этого, благодаря разности потенциалов неподвижных электродов с обеих сторон подвижного электрода.
При использовании электростатических двигателей в качестве ответвителей, настройка частоты может быть простым образом выполнена с помощью отдельных настроечных электродов.
Работа Кориолисова гироскопа может быть обеспечена за счет возбуждения моды возбуждения датчиком силы. Вращение Кориолисова гироскопа относительно оси чувствительности вызывает действие Кориолисовых сил, что, в свою очередь, приводит к возбуждению моды детектирования. В качестве измеримой переменной может быть использована амплитуда результирующего колебания. Для этого предусмотрены соответствующие ответвители. В качестве варианта, Кориолисовы силы могут быть восстановлены. Необходимые для этой цели датчики силы могут прикладывать к моде детектирования соответствующие моменты и/или силы. В этом случае амплитуда восстанавливающего момента или восстанавливающей силы служит мерой угловой скорости. Датчики силы и ответвители, за счет которых может быть выполнено приложение сил в направлении оси z и измерение перемещений в направлении оси z, не требуются.
Примеры реализации датчиков вращения согласно изобретению будут приведены ниже со ссылкой на чертежи.
На фиг.1 представлен схематичный вид сверху датчика скорости вращения.
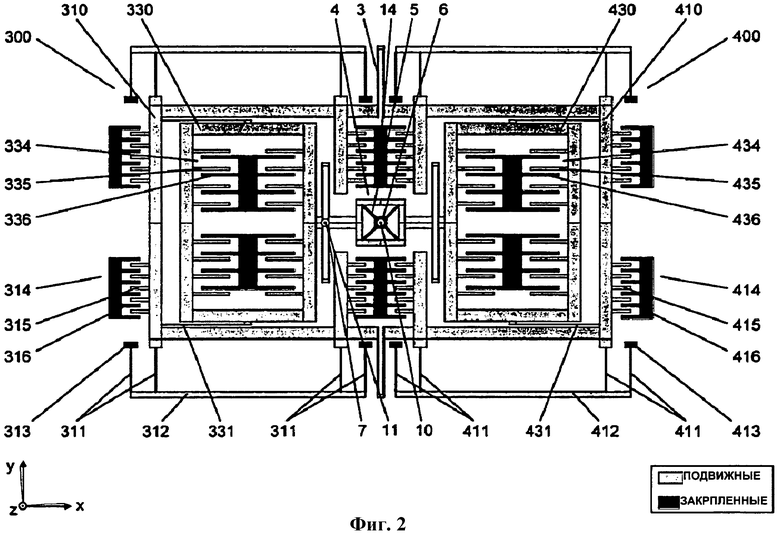
На фиг.2 представлен схематичный вид сверху первого варианта реализации датчика скорости вращения согласно изобретению.
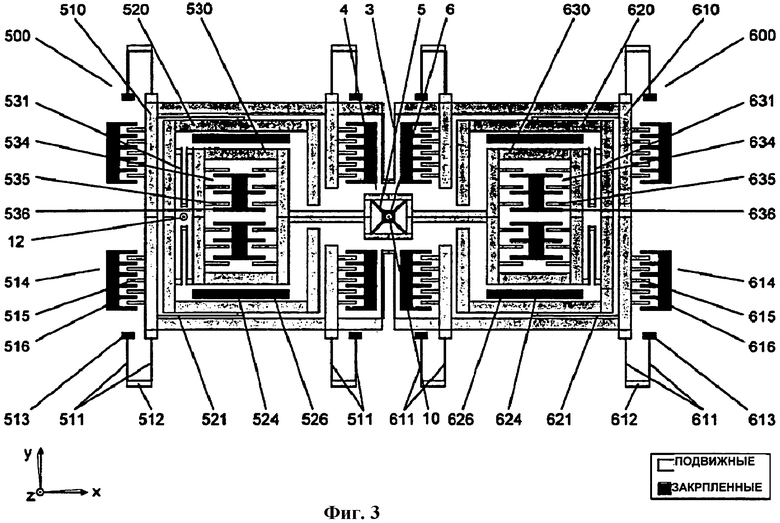
На фиг.3 представлен схематичный вид сверху второго варианта реализации датчика скорости вращения согласно изобретению.
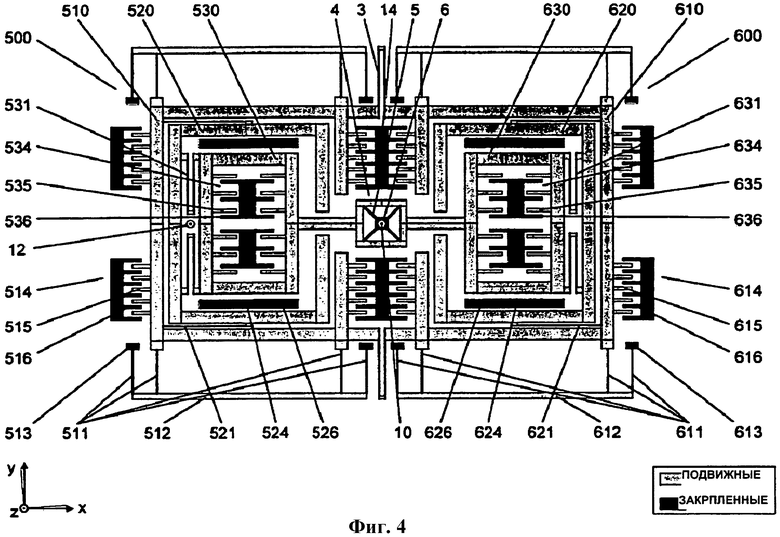
На фиг.4 представлен схематичный вид сверху третьего варианта реализации датчика скорости вращения согласно изобретению.
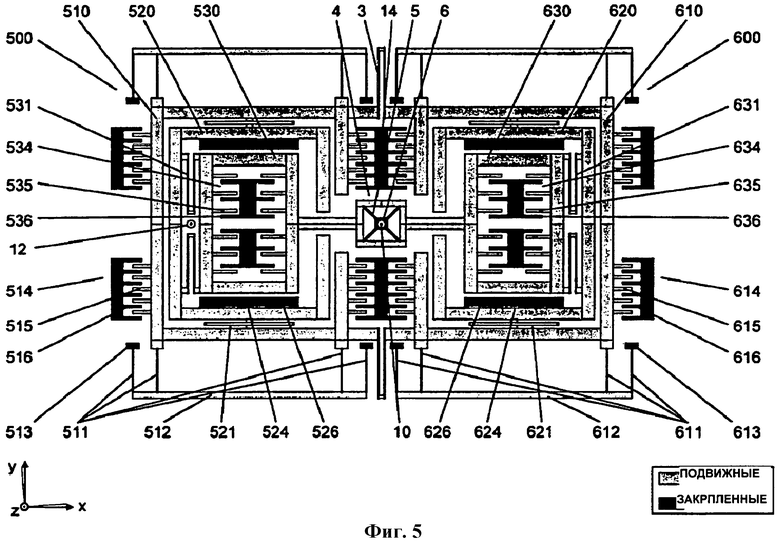
На фиг.5 представлен схематичный вид сверху четвертого варианта реализации датчика скорости вращения согласно изобретению.
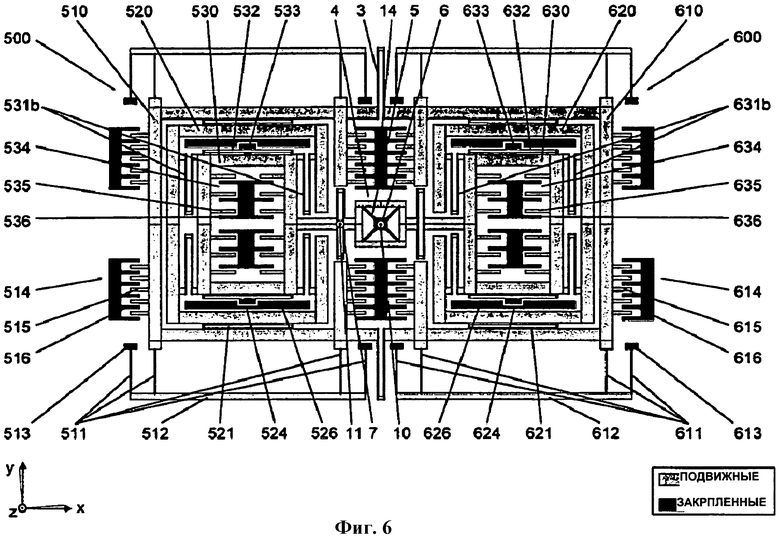
На фиг.6 представлен схематичный вид сверху пятого варианта реализации датчика скорости вращения согласно изобретению.
На фиг.7 представлен схематичный вид сверху датчика скорости вращения известного уровня техники.
На фиг.8 представлен схематичный вид сверху еще одного датчика скорости вращения известного уровня техники.
В некоторых случаях для ясности одним и тем же элементам на чертежах присвоены разные номера позиций. Однако, исходя из описываемых симметрий и идентичных чертежей, специалист в данной области может сделать вывод о том, какие элементы на чертежах обозначены какими номерами позиций.
Во всех вариантах реализации изобретения ось чувствительности расположена под прямым углом к плоскости чертежа. Считают, что плоскость чертежа параллельна оси х и оси y, а ось z расположена под прямым углом к ним и, следовательно, параллельна оси чувствительности. Поверхность подложки параллельна осям х и y и поэтому образует рабочую плоскость х-y.
Все элементы, которые выделены светло-серым цветом, представляют собой подвижные "элементы массы", которые в первом приближении можно рассматривать как бесконечно жесткие. Участки, выделенные темно-серым цветом, большей частью не могут перемещаться относительно подложки. Линии представляют упругие стержни, которые используют в качестве компонентов упругих элементов. С хорошим приближением эти упругие стержни бесконечно жесткие в продольном направлении. Если размер упругого стержня в направлении оси z значительно превышает размер в плоскости чертежа под прямым углом к продольному направлению, то упругие стержни обладают значительно большей жесткостью в направлении оси z, чем в направлении оси на плоскости чертежа, расположенной под прямым углом к продольному направлению. С хорошим приближением массой/моментом инерции упругих балок и элементов массы, которые являются частью упругой структуры, зачастую можно пренебречь.
Указанные приближения использованы в описании, например, указанием "по существу".
Изготовление модификаций может быть выполнено различными технологическими способами, в частности, с помощью микротехнических способов.
Датчик скорости вращения, который показан на фиг.1, содержит подложку (не показана) и две первые отдельные структуры 100, 200. Первые отдельные структуры 100, 200 содержат колеблющиеся тела 110, 210, которые присоединены к подложке с помощью первых упругих элементов 111, 211 в первых точках 113, 213 крепления. Первые упругие элементы 111, 211 выполнены податливыми в направлении осей х и y и обладают максимальной жесткостью в направлении оси z. Два колеблющихся тела 110, 210 связаны с помощью соединительных упругих структур 3, вращающегося упругого элемента 4 и упругих элементов 7, вращающихся относительно оси х.
Соединительная упругая структура 3 выполнена гибкой в направлении оси х и обладает максимальной жесткостью в направлении осей z и y. Вращающийся упругий элемент 4, который содержит упругий стержень 5 и крепление 6 на подложке, выполнен податливым в направлении оси z при кручении относительно своей оси 10 симметрии и обладает жесткостью при всех других нагрузках. Упругий элемент 7, вращающийся относительно оси х, выполнен податливым в направлении осей х и z при кручении относительно своей оси 11 симметрии и обладает жесткостью при всех других нагрузках. Однако в данном варианте для подавления кручения вращающегося упругого элемента 7 относительно оси х предусмотрено специальное устройство (в частности, соединительная упругая структура 3). Поэтому вместо упругого относительно оси элемента 7 может быть использован элемент, упругий относительно оси х, который выполнен податливым в направлении оси х и обладает жесткостью при всех других нагрузках. Это позволяет усовершенствовать управление модой возбуждения.
Мода возбуждения соответствует линейному колебанию в противофазе колеблющихся тел 110, 210 в направлении оси х. На резонансную частоту моды возбуждения, по существу, оказывают влияние масса колеблющихся тел 110, 210 и пружинной жесткости или крутильной пружинной жесткости упругих элементов 111, 211, соединительные упругие структуры 3 и упругие элементы 7, вращающиеся относительно оси х.
Мода детектирования соответствует (общим) крутильным колебаниям колеблющихся тел 110, 210 относительно своей оси 10 симметрии в направлении оси z. Резонансная частота моды детектирования обусловлена моментами инерции колеблющихся тел 110, 210 и пружинной жесткостью или крутильной пружинной жесткостью первых упругих элементов 111, 211 и вращающегося упругого элемента 4.
Первые отдельные структуры 100, 200 снабжены первыми датчиками 114, 214 силы, с помощью которых возбуждается мода возбуждения. Эти датчики силы могут быть также спроектированы в качестве ответвителей для моды возбуждения, или ответвители должны быть предусмотрены дополнительно. В приведенном примере в качестве датчиков силы использованы так называемые электростатические двигатели. Они содержат первые подвижные электроды 115, 215 возбуждения, которые интегрированы в колеблющиеся тела 110, 210, и первые электроды 116, 216 возбуждения, которые закреплены на подложке. Электростатические двигатели могут быть в то же самое время использованы в качестве датчиков силы и ответвителей.
Первые отдельные структуры 100, 200 снабжены первыми ответвителями 134, 234, с помощью которых регистрируется мода детектирования. Эти ответвители могут быть также использованы в качестве датчиков силы, компенсирующих Кориолисовы силы при выполнении ответвителями восстанавливающей операции, или датчики силы должны быть предусмотрены дополнительно. В приведенном примере в качестве ответвителей показаны пластинчато-конденсаторные конструкции, в которых расстояние между пластинами меняется во время перемещения при детектировании. Ответвители содержат первые подвижные электроды 135, 235 детектирования, которые интегрированы в колеблющиеся тела 110, 210, и первые электроды 136, 236 детектирования, которые закреплены на подложке. Пластинчато-конденсаторные конструкции могут быть в то же самое время использованы в качестве датчиков силы и ответвителей.
В примере, представленном на фиг.1, линейная мода возбуждения может быть совершена только в плоскости подложки. Среди прочего это означает, в случае приведенного примера, в котором имеются первые датчики 114, 214 силы с первыми неподвижными электродами 116, 216 возбуждения, возмущающие силы могут оказывать более неблагоприятное воздействие на моду детектирования, чем в случае моды возбуждения, осуществляемой в одном направлении. Например, неправильное относительное расположение между первыми датчиками 114, 214 силы и наличие моды возбуждения могут вызвать большое искажающее возбуждение моды детектирования.
Кроме того, при использовании в приведенном примере первых ответвителей 134, 234 с первыми неподвижными электродами 136, 236 детектирования могут быть выявлены сигналы ошибки, если допуски на изготовление приводят к образованию углов рассогласования между перемещением при возбуждении и ответвителями.
Поэтому пример, представленный на фиг.1, представляет интерес при использовании датчиков силы и/или ответвителей для моды возбуждения, силы и сигналы которых не зависят значительно от перемещения при детектировании, и/или при использовании ответвителей и/или датчиков силы для моды детектирования, силы и сигналы которой не зависят значительно от перемещения при возбуждении.
Первый вариант реализации, который показан на фиг.2, содержит подложку (не показана) и две вторые отдельные структуры 300, 400. Вторые отдельные структуры содержат первые модули 310, 410 возбуждения, которые присоединены к подложке посредством вторых упругих элементов 311, 411 во вторых точках 313, 413 крепления. Эталонные массы 330, 430 связаны с первыми модулями 310, 410 возбуждения посредством упругих относительно оси y элементов 331, 431. Первые модули 310, 410 возбуждения непосредственно связаны с соединительными упругими структурами 3. Эталонные массы 330, 430 непосредственно связаны с вращающимся упругим элементом 4 и с упругими элементами 7, вращающимися относительно оси х.
Вторые упругие элементы 311, 411 выполнены податливыми в направлении оси х и обладают максимальной жесткостью в направлении осей y и z. Для улучшения направляющих свойств они связаны с монолитными элементами 312, 412. Упругие относительно оси y элементы 331, 431 выполнены податливыми в направлении оси y и обладают максимальной жесткостью в направлении осей х и z. Соединительные упругие структуры 3 выполнены податливыми в направлении оси х, обладают жесткостью в направлении оси z и максимальной жесткостью в направлении оси y. Вращающийся упругий элемент 4, который содержит упругий стержень 5 и крепление 6 на подложке, выполнен податливым в направлении оси z при кручении относительно своей оси 10 симметрии, и обладает жесткостью при всех других нагрузках. Упругий элемент 7, вращающийся относительно оси х, выполнен податливым в направлении осей х и z при кручении относительно своей оси 11 симметрии и обладает жесткостью при всех других нагрузках.
Возбужденные колебания соответствуют линейному колебанию в противофазе первых модулей 310, 410 возбуждения вместе с эталонными массами 330, 430 в направлении оси х. Резонансная частота возбужденных колебаний обусловлена массой первых модулей 310, 410 возбуждения и эталонными массами 330, 430, а также пружинными жесткостями и крутильными пружинными жесткостями при кручении вторых упругих элементов 311, 411, соединительных упругих структур 3 и упругих элементов 7, вращающихся относительно оси х.
Мода детектирования соответствует (общему) "типу крутильных колебаний", т.е. комбинации крутильных колебаний и линейных колебаний в противофазе эталонных масс 330, 430 относительно своей оси 10 симметрии в направлении оси z, причем эталонные массы 330, 430 ориентированы в направлении оси y посредством упругих относительно оси y элементов 331, 431 и не наклонены. Резонансная частота моды детектирования обусловлена массами и моментами инерции эталонных масс 330, 430, а также пружинными жесткостями или крутильными пружинными жесткостями относительно оси y упругих элементов 331, 431, вращающегося упругого элемента 4 и упругих элементов 7, вращающихся относительно оси х.
Вторые отдельные структуры 300, 400 снабжены вторыми датчиками 314, 414 силы, посредством которых вызывается мода возбуждения. Эти вторые датчики 314, 414 силы имеются также в качестве ответвителей моды возбуждения, или ответвители должны быть предусмотрены дополнительно. В приведенном примере в качестве вторых датчиков 314, 414 силы показаны так называемые электростатические двигатели. Они содержат вторые подвижные электроды 315, 415 возбуждения, которые встроены в первые модули 310, 410 возбуждения, и вторые электроды 316, 416 возбуждения, которые закреплены на подложке. В приведенном примере расположенные по центру неподвижные электроды возбуждения для вторых датчиков силы двух вторых отдельных структур 300, 400 могут быть в каждом случае объединены с образованием одного датчика 14 силы, что не является существенным признаком, но способствует уменьшению числа требуемых соединений. Кроме того, внешние вторые неподвижные электроды возбуждения могут быть объединены, например, соответствующими токопроводящими дорожками. Электростатические двигатели могут быть в то же самое время использованы в качестве датчиков силы и в качестве ответвителей.
Вторые отдельные структуры 300, 400 снабжены вторыми ответвителями 334, 434, с помощью которых регистрируется мода возбуждения. Эти ответвители могут быть также использованы в качестве датчиков силы для компенсации Кориолисовой силы в режиме восстановления, или датчики силы должны быть предусмотрены дополнительно. В приведенном примере в качестве вторых ответвителей показаны пластинчато-конденсаторные конструкции, в которых расстояние между пластинами может быть изменено во время перемещения при детектировании. Вторые ответвители содержат вторые подвижные электроды 335, 435 детектирования, которые встроены в эталонные массы 330, 430, и вторые электроды 336, 436 детектирования, которые закреплены на подложке. Пластинчато-конденсаторные конструкции могут быть в то же самое время использованы в качестве датчиков силы и в качестве ответвителей.
В первом варианте реализации изобретения эталонные массы также могут осуществлять перемещение при возбуждении. Это означает, что при использовании в приведенном примере вторых ответвителей 334, 434 со вторыми неподвижными электродами 336, 436 детектирования могут быть определены сигналы ошибки, если допуски на изготовление приводят к образованию углов рассогласования между перемещением при возбуждении и вторыми ответвителями 334, 434. Поэтому первый вариант реализации изобретения представляет особый интерес при использовании ответвителей, сигналы которых не зависят от перемещения при возбуждении.
Второй вариант реализации изобретения, который показан на фиг.3, содержит подложку (не показана) и две третьи отдельные структуры 500, 600. Третьи отдельные структуры содержат вторые модули 510, 610 возбуждения, которые присоединены к подложке посредством третьих упругих элементов 511, 611 в третьих точках 513, 613 крепления. Элементы 520, 620, основанные на эффекте Кориолиса, соединены со вторым модулем 510, 610 возбуждения через упругие относительно оси y элементы 521, 621. Модули 530, 630 регистрации связаны с элементами 520, 620, основанными на эффекте Кориолиса, через дополнительные упругие элементы 531, 631, вращающиеся относительно оси х. Вторые модули 510, 610 возбуждения связаны непосредственно с соединительными упругими структурами 3. Модули 530, 630 регистрации связаны непосредственно с вращающимся упругим элементом 4.
Третьи упругие элементы 511, 611 выполнены податливыми в направлении оси х и обладают максимальной жесткостью в направлении осей y и z. Для улучшения направляющих свойств они связаны с монолитными элементами 512, 612. Упругие относительно оси y элементы 521, 621 выполнены податливыми в направлении оси y и обладают максимальной жесткостью в направлении осей х и z. Дополнительные упругие элементы 531, 631, вращающиеся относительно оси х, выполнены податливыми в направлении оси х и в направлении оси z при кручении относительно своей осей 12 симметрии (двух отдельных упругих элементов, которые расположены на чертеже один над другим), но обладают жесткостью при всех других нагрузках. В идеале, дополнительные упругие элементы 531, 631, вращающиеся относительно оси х, могут иметь соединение, которое в то же самое время обеспечивает относительное вращение и изменение расстояния в направлении оси х между элементом, основанным на эффекте Кориолиса, и модулем регистрации.
Соединительные упругие структуры 3 выполнены податливыми в направлении оси х и обладают жесткостью в направлении осей z и y. Вращающийся упругий элемент 4, который содержит упругий стержень 5 и крепление 6 на подложке, выполнен податливым в направлении оси z при кручении относительно своей оси 10 симметрии и обладает жесткостью при всех других нагрузках.
Мода возбуждения соответствует линейному колебанию в противофазе вторых модулей 510, 610 возбуждения вместе с элементами 520, 620, основанными на эффекте Кориолиса, в направлении оси х. Резонансная частота моды возбуждения обусловлена массой вторых модулей 510, 610 возбуждения и элементов 520, 620, основанных на эффекте Кориолиса, а также пружинными жесткостями и крутильными пружинными жесткостями третьих упругих элементов 511, 611, упругих элементов 531, 631, вращающихся относительно оси х, и соединительных упругих структур 3.
Мода детектирования соответствует (общим) крутильным колебаниям модулей 530, 630 регистрации относительно их оси 10 симметрии в направлении оси z. В этом случае элементы 520, 620, основанные на эффекте Кориолиса, совершают "тип крутильных колебаний". Они ориентированы в направлении оси y относительно третьих модулей 510, 610 возбуждения с помощью упругих элементов 521, 621 и могут вращаться с помощью дополнительных упругих элементов 531, 631, вращающихся относительно оси х, относительно соответствующих модулей 530, 630 регистрации. Резонансная частота моды детектирования обусловлена большей частью массами/моментами инерции элементов 520, 620, основанных на эффекте Кориолиса, и модулей 530, 630 регистрации, а также пружинными жесткостями и крутильными пружинными жесткостями, в частности вращающегося упругого элемента 4, дополнительных упругих элементов 531, 631, вращающихся относительно оси х, и упругих относительно оси y элементов 521, 621.
Третьи отдельные структуры 500, 600 снабжены третьими датчиками 514, 614 силы, посредством которых возбуждается мода возбуждения. Эти датчики силы могут быть также использованы в качестве ответвителей для моды возбуждения, или ответвители должны быть предусмотрены дополнительно. В приведенном примере в качестве третьих датчиков 514, 614 силы могут быть использованы так называемые электростатические двигатели. Они содержат третьи подвижные электроды 515, 615 возбуждения, которые интегрированы во вторые модули 510, 610 возбуждения, и третьи электроды 516, 616 детектирования, которые закреплены на подложке. Электростатические двигатели могут быть в то же самое время использованы в качестве датчиков силы и в качестве ответвителей.
Третьи отдельные структуры 500, 600 снабжены третьими ответвителями 534, 634, посредством которых регистрируется мода детектирования. Эти ответвители могут быть также спроектированы в качестве датчиков силы для компенсации Кориолисовой силы для режима восстановления, или датчики силы должны быть предусмотрены дополнительно. В приведенном примере в качестве третьих ответвителей 534, 634 использованы пластинчато-конденсаторные конструкции, в которых расстояние между пластинами меняется во время перемещения при детектировании. Третьи ответвители содержат третьи подвижные электроды 535, 635 детектирования, которые интегрированы в модулях 530, 630 регистрации, и третьи электроды 536, 636 детектирования, которые закреплены на подложке. Пластинчато-конденсаторные конструкции могут быть в то же самое время использованы в качестве датчиков силы и в качестве ответвителей.
Следует отметить, что электростатические двигатели могут быть также использованы в качестве ответвителей (и датчиков силы) для моды детектирования, поскольку модули регистрации не осуществляют перемещений при возбуждении. Пластинчато-конденсаторные конструкции с изменением расстояния между пластинами, используемые в качестве ответвителей для моды детектирования, имеют особенность, заключающуюся в том, что приложенное электрическое напряжение вызывает изменение резонансной частоты моды детектирования. С одной стороны, это свойство может быть использовано специально для регулирования частоты (удвоения резонанса). Напротив, резонансная частота, например, может быть модулирована посредством модулирующих сигналов для функционирования ответвителя или посредством восстанавливающих напряжений (зависящих от скорости вращения). В электростатических двигателях этот недостаток отсутствует. При использовании электростатических двигателей для выполнения вышеописанной регулировки частоты могут также быть встроены пластинчато-конденсаторные конструкции с переменным расстоянием между пластинами.
Необходимо также отметить, что для элементов 520, 620, основанных на эффекте Кориолиса, также могут быть предусмотрены датчики силы, ответвители и/или устройства 524, 624 для перестройки частоты. Приведенный пример относится к пластинчато-конденсаторным конструкциям с переменным расстоянием между пластинами. Эти структуры содержат подвижные электроды, которые встроены в элементы 520, 620, основанные на эффекте Кориолиса, и настроечные электроды 526, 626, которые закреплены на подложке (для каждого случая показан только один электрод).
В третьем варианте реализации изобретения модули 530, 630 регистрации совершают одновременно крутильные колебания. В приведенном примере наличие трех ответвителей 534, 634 с неподвижными третьими электродами 536, 636 приводит к изменению расстояния между пластинами позиционно-зависимых пластинчато-конденсаторных конструкций, что создает дополнительную сложность конструкции и линеаризации. Другое решение состоит в том, что вышеупомянутые электростатические двигатели используют, например, в качестве ответвителей/датчиков силы, и для выполнения регулировки частоты посредством устройств 524, 624.
Третий вариант реализации изобретения, показанный на фиг.4, в значительной степени представляет собой второй вариант реализации со следующими изменениями.
- Для улучшения своих характеристик монолитные элементы 512, 612 выполнены непрерывными.
- Соединительная упругая структура 3 выполнена отогнутой наружу.
- В каждом случае центрально расположенные закрепленные электроды центрально расположенных третьих датчиков 514, 614 силы двух третьих отдельных структур 500, 600 объединены с формированием датчиков 14 силы, обеспечивая, таким образом, уменьшение числа соединений.
Четвертый вариант реализации изобретения, показанный на фиг.5, в значительной степени представляет собой третий вариант реализации со следующими изменениями (см. фиг.5).
Упругие относительно оси y элементы 521, 621, которые соединяют модули 510, 610 возбуждения с элементами 520, 620, основанными на эффекте Кориолиса, изменены. Это приводит к тому, что элементы 520, 620, основанные на эффекте Кориолиса, зажаты с двух сторон, тогда как в третьем варианте реализации изобретения элементы 520, 620 зажаты только с одной стороны (фиг.4). Зажатие с одной стороны обеспечивает квадратурную компенсацию, другими словами компенсацию за счет преобразования ускорения возбуждения в моду детектирования. Однако под влиянием ускорения возбуждения частота моды детектирования модулируется. При зажатии с двух сторон квадратурная компенсация значительно уменьшена, но квадратурные составляющие меньше, а частота моды детектирования модулирована в меньшей степени за счет ускорения возбуждения. Кроме того, упругие элементы 531, 631, вращающиеся относительно оси х, в меньшей степени обеспечивают квадратурную компенсацию и, более того, модулируют частоту моды детектирования. В случае идеальных упругих элементов, вращающихся относительно оси х, с ничтожно малой жесткостью в направлении относительно оси х этот эффект исчезает.
Пятый вариант реализации изобретения имеет следующие изменения по сравнению с четвертым вариантом реализации (см. фиг.6). Модули 530, 630 регистрации дополнительно прикреплены к подложке посредством дополнительных упругих относительно оси y элементов 532, 632 в точках 533, 633 крепления. Упругие элементы 7, вращающиеся относительно оси х, расположены между вращающимся упругим элементом 4 и модулями 530, 630 регистрации. Упругие относительно оси х элементы 531b, 631b, которые соединяют модули 530, 630 регистрации с элементами 520, 620, основанными на эффекте Кориолиса, могут быть выполнены на двустороннем основании, поскольку они больше не должны иметь какой-либо "характеристики соединения". Упругие относительно оси х элементы 531b, 631b выполнены податливыми в направлении оси х, но обладают жесткостью при всех других нагрузках.
Дополнительные упругие относительно оси y элементы 532, 632 выполнены податливыми в направлении оси y, но обладают жесткостью при всех других нагрузках.
Упругий элемент 7, вращающийся относительно оси х, выполнен податливым в направлении осей х и y при кручении относительно своей оси 11 симметрии и обладает жесткостью при всех других нагрузках.
Резонансная частота моды возбуждения обусловлена массой вторых модулей 510, 610 возбуждения и элементами 520, 620, основанными на эффекте Кориолиса, а также пружинными жесткостями или крутильными пружинными жесткостями третьих упругих элементов 511, 611, упругих относительно оси х элементов 531b, 631b, соединительных упругих структур 3 и упругих элементов 7, вращающихся относительно оси х.
Мода детектирования соответствует (общим) крутильным колебаниям модулей 530, 630 регистрации и элементов, основанных на эффекте Кориолиса, относительно своей оси 10 симметрии в направлении оси z. Также как и во втором, третьем и четвертом вариантах реализации изобретения, в этом случае элементы 520, 620, основанные на эффекте Кориолиса, могут совершать линейные колебания в противофазе в направлении оси y. В пятом варианте реализации изобретения модули 530, 630 регистрации могут быть также ориентированы в направлении оси y, с помощью дополнительных упругих относительно оси y элементов 532, 632. Они могут вращаться вокруг оси 11 относительно вращающегося упругого элемента 4, посредством упругих элементов 7, вращающихся относительно оси х. Поэтому их движение также соответствует линейным колебаниям в противофазе в направлении оси y. Резонансная частота моды детектирования в основном обусловлена массами/моментами инерции элементов 520, 620, основанных на эффекте Кориолиса, и модулей 530, 630 регистрации, а также пружинной жесткостью при изгибе и крутильной пружинной жесткостью, в частности упругого элемента 4, вращающегося относительно оси х, упругих элементов 7, вращающихся относительно оси х, дополнительных упругих относительно оси y элементов 532, 632 и упругих относительно оси y элементов 521, 621, которые связывают элементы 520, 620, основанные на эффекте Кориолиса, с модулями 510, 610 возбуждения.
В отличие от второго, третьего и четвертого вариантов реализации изобретения, пятый вариант реализации предотвращает совместное выполнение модулями 530, 630 регистрации крутильных колебаний, и в данном примере с третьими ответвителями 534, 634, имеющими третьи неподвижные электроды 536, 636 детектирования, изменение расстояния между пластинами в пластинчато-конденсаторных конструкциях позиционно-зависимо. Кроме того, устранение взаимовлияния упругих элементов 7, вращающихся относительно оси х, на движение моды возбуждения посредством упругих относительно оси х элементов 531b и 631b может привести к уменьшению квадратурных составляющих и подавлению модуляции частоты моды детектирования за счет ускорения возбуждения. Это также подразумевает невозможность квадратурной компенсации, которая была предложена для предыдущих вариантов реализации изобретения. При зажатии элементов 520, 620, основанных на эффекте Кориолиса, с одной стороны посредством упругих элементов 521, 621 (см. фиг.4), эти эффекты могут быть включены в вариант реализации изобретения, представленный на фиг.6, а также использованы для квадратурной компенсации.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРИОЛИСОВ ГИРОСКОП | 2008 |
|
RU2439495C2 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП С ЭЛЕКТРОСТАТИЧЕСКИМ ВЗАИМОДЕЙСТВИЕМ | 2004 |
|
RU2391631C2 |
| РАЗДЕЛЕННЫЕ УРАВНОВЕШИВАЮЩИЕ ГРУЗЫ ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ПЛОТНОСТИ НА ИЗМЕРЕНИЕ РАСХОДА | 2004 |
|
RU2348906C2 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2630542C1 |
| КОРИОЛИСОВ ГИРОСКОП, СОДЕРЖАЩИЙ КОРРЕКТИРОВОЧНЫЕ МОДУЛИ, И СПОСОБ УМЕНЬШЕНИЯ КВАДРАТУРНОГО ИСКАЖЕНИЯ | 2011 |
|
RU2554312C2 |
| ВСТРОЕННЫЕ В ТРУБОПРОВОД ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА И СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ ВО ВСТРОЕННЫХ В ТРУБОПРОВОД ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВАХ | 2006 |
|
RU2369842C2 |
| ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2009 |
|
RU2517954C2 |
| Интегральный микромеханический гироскоп | 2021 |
|
RU2778622C1 |
| ИНЕРЦИАЛЬНЫЙ ЭЛЕМЕНТ | 2014 |
|
RU2573616C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2010 |
|
RU2426132C1 |
Датчик скорости вращения содержит подложку и две структуры (100, 200, 300, 400, 500, 600), выполненные с возможностью перемещения относительно подложки на рабочей плоскости (х-y). Две подвижные структуры (100, 200, 300, 400, 500, 600) соединены, чтобы формировать связанную структуру, такую, что она имеет первую моду колебаний с отклонениями в противофазе подвижных структур в первом направлении (х) на рабочей плоскости (х-y) в качестве моды возбуждения и вторую моду колебаний в качестве моды детектирования, которая может быть возбуждена ускорениями Кориолиса при возбуждении первой моды колебаний и при вращении относительно оси (z) чувствительности датчика скорости вращения которая расположена под прямым углом к рабочей плоскости (х-y) датчика скорости вращения. Связанная структура выполнена таким образом, что при идеальных предварительных условиях в ней отсутствует мода колебаний, которая может быть возбуждена линейными ускорениями датчика скорости вращения в направлении, параллельном второй оси. Изобретение позволяет избежать ошибок измерения, возникающих на основе подвижных отдельных структур (100, 200, 300, 400, 500, 600) в случае датчиков скорости вращения при возникновении линейных ускорений. 12 з.п. ф-лы, 8 ил.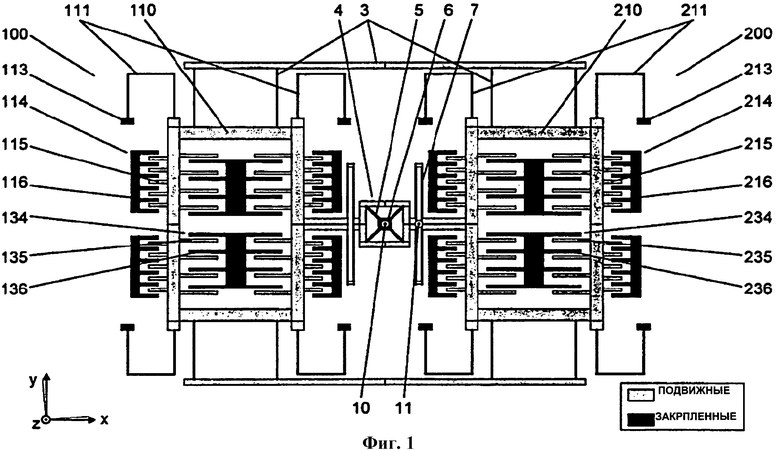
1. Датчик скорости вращения, включающий
подложку и две многоэлементные отдельные структуры (300, 400, 500, 600), выполненные с возможностью перемещения относительно подложки на рабочей плоскости (х-y) и соединенные между собой с формированием связанной структуры, имеющей
- первую моду колебаний с отклонениями в противофазе подвижных структур в первом направлении (х) на рабочей плоскости (х-y) в качестве моды возбуждения и
- вторую моду колебаний в качестве моды детектирования, которая может быть возбуждена ускорениями Кориолиса при возбуждении первой моды колебаний и при вращении вокруг оси (z) чувствительности, расположенной под прямым углом на рабочей плоскости датчика скорости вращения, отличающийся тем, что в нем предусмотрен вращающийся упругий элемент (4), который является податливым при кручении относительно оси (10) симметрии, параллельной оси (z) чувствительности, и жестким при всех других нагрузках и соединяет указанные две отдельные структуры (300, 400, 500, 600) между собой таким образом, что части отдельных структур совершают общие крутильные колебания вокруг оси (10) симметрии, причем мода детектирования содержит передаваемые от крутильных колебаний линейные колебания в противофазе частей указанных двух отдельных структур (300, 400, 500, 600) вдоль второго направления (y), расположенного под прямым углом к первому направлению (х).
2. Датчик скорости вращения по п.1, отличающийся тем, что вращающийся упругий элемент (4) содержит упругие стержни (5) и крепление (6) на подложке и сформирован симметрично относительно оси (10) симметрии.
3. Датчик скорости вращения по п.1, отличающийся тем, что
указанные отдельные структуры (300, 400) содержат модули (310, 410) возбуждения и эталонные массы (330, 430), причем модули (310, 410) возбуждения выполнены с возможностью перемещения только в первом направлении (х), соединены между собой посредством соединительных упругих структур (3) и соединены с эталонными массами (330, 430) посредством упругих относительно у элементов (331, 431),
причем упругие относительно у элементы (331, 431) являются жесткими в первом направлении (х) и параллельны оси (z) чувствительности, а также являются податливым во втором направлении (y), а
эталонные массы (330, 430) соединены посредством упругих вращающихся относительно х элементов (7) с вращающимся упругим элементом (4),
при этом упругие вращающиеся относительно х элементы (7) имеют ось (11) симметрии, которая параллельна оси (z) чувствительности, расположены в каждом случае между отдельными структурами (300, 400) и вращающимся упругим элементом (4), и являются податливыми в направлении х и при кручении относительно своей оси (11) симметрии, и жесткими при всех других нагрузках.
4. Датчик скорости вращения по п.2, отличающийся тем, что указанные отдельные структуры (500, 600) содержат модули (510, 610) возбуждения, элементы (520, 620), основанные на эффекте Кориолиса, и модули (530, 630) регистрации, причем модули (510, 610) возбуждения соединены посредством соединительной упругой структуры (3), модули (530, 630) регистрации соединены посредством вращающегося упругого элемента (4) и упругих вращающихся относительно х элементов (7), элементы (520, 620), основанные на эффекте Кориолиса, соединены посредством упругих относительно у элементов (521, 621) с модулями (510, 610) возбуждения, а модули (530, 630) регистрации соединены посредством упругих относительно х элементов (531b, 631b) с элементами (520, 620), основанными на эффекте Кориолиса, при этом отдельные структуры (500, 600) снабжены дополнительными упругими относительно у элементами (532, 632), посредством которых модули (530, 630) регистрации закреплены на подложке, и которые выполненными таким образом, что они являются податливыми в направлении второй оси (y) и жесткими при всех других нагрузках, а упругие вращающиеся относительно х элементы (7) имеют ось (11) симметрии, которая параллельна оси (z) чувствительности, расположены в каждом случае между отдельными структурами (500, 600) и вращающимся упругим элементом (4), и являются податливыми в направлении х и при кручении вокруг своей оси (11) симметрии и жесткими при всех других нагрузках.
5. Датчик скорости вращения по п.1 или 2, отличающийся тем, что мода детектирования представляет собой смешанный тип из линейных колебаний в противофазе частей двух отдельных структур (300, 400, 500, 600) вдоль второго направления (y) и крутильных колебаний других частей двух отдельных структур (300, 400, 500, 600) относительно оси (z) чувствительности.
6. Датчик скорости вращения по п.5, отличающийся тем, что указанные отдельные структуры (500, 600) содержат модули (510, 610) возбуждения, элементы (520, 620), основанные на эффекте Кориолиса, и модули (530, 630) регистрации, причем элементы (520, 620), основанные на эффекте Кориолиса, соединены посредством упругих относительно у элементов (521, 621) с модулями (510, 610) возбуждения, которые соединены между собой посредством соединительных упругих структур (3), а модули (530, 630) регистрации соединены посредством вращающегося упругого элемента (4), при этом упругие вращающиеся относительно х элементы (531, 631), которые имеют ось (11) симметрии, параллельную оси (z) чувствительности, расположены в каждом случае между элементами (520, 620), основанными на эффекте Кориолиса, и модулями (530, 630) регистрации и являются податливыми в направлении х и при кручении вокруг своей оси (11) симметрии и жесткими при всех других нагрузках.
7. Датчик скорости вращения по любому из пп.1-4, 6, отличающийся тем, что указанные отдельные структуры (300, 400, 500, 600) снабжены датчиками (314, 414, 514, 614) силы для возбуждения моды возбуждения.
8. Датчик скорости вращения по любому из пп.1-4, 6, отличающийся тем, что указанные отдельные структуры (300, 400, 500, 600) снабжены ответвителями для моды возбуждения.
9. Датчик скорости вращения по любому из пп.1-4, 6, отличающийся тем, что указанные отдельные структуры (300, 400, 500, 600) снабжены ответвителями (334, 434, 534, 634) для регистрации моды детектирования.
10. Датчик скорости вращения по п.9, отличающийся тем, что указанные ответвители (334, 434, 534, 634) для регистрации моды детектирования представляют собой пластинчато-конденсаторные конструкции.
11. Датчик скорости вращения по п.9, отличающийся тем, что указанные ответвители (534, 634) для регистрации моды детектирования представляют собой электростатические двигатели.
12. Датчик скорости вращения по любому из пп.1-4, 6, 10-11, отличающийся тем, что указанные отдельные структуры (300, 400, 500, 600) снабжены датчиками силы для восстановления моды детектирования.
13. Датчик скорости вращения по любому из пп.1-4, 6, 10-11, отличающийся тем, что в нем предусмотрены настроечные электроды (524, 624) для обеспечения настройки резонансной частоты отдельных структур (300, 400, 500, 600).
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6705164 В2, 16.03.2004 | |||
| ИНТЕГРИРУЮЩИЙ МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2296300C1 |

