Изобретение относится к кориолисовому гироскопу, содержащему корректировочные модули для уменьшения квадратурного искажения, к системе, состоящей из соединенных друг с другом кориолисовых гироскопов, которая включает в себя корректировочные модули для уменьшения квадратурного искажения, и к способу уменьшения квадратурного искажения.
Кориолисовы гироскопы (вибрационные гироскопы, датчики угловой скорости) включают в себя однокомпонентную, однако, как правило, все же многокомпонентную систему масс, в которой возбуждают колебания. Для этого с целью работы кориолисового гироскопа возбуждают первый режим колебаний (колебания возбуждения) системы масс. Если кориолисов гироскоп вращают вокруг его чувствительной оси, то возникающие кориолисовы силы возбуждают второй режим колебаний системы масс, который непосредственно или косвенно регистрируется, при этом получают считываемый сигнал, отображающий второй режим колебаний. Считываемый сигнал подвергают анализу на предмет изменений амплитуды, которая представляет собой меру угловой скорости, приложенной к кориолисовому гироскопу. В кориолисовом гироскопе, выполненном в виде системы с обратной связью, амплитуду считываемого колебания непрерывно возвращают при помощи регулирующей системы до фиксированного значения, например до нуля, так что приложенная угловая скорость выводится из требующихся для этого восстанавливающих сил.
Система масс кориолисового гироскопа может быть выполнена в виде однокомпонентной или в виде многокомпонентной системы. Например, система масс включает в себя две частичные массы (вибраторы), которые соединены друг с другом посредством системы пружин и могут совершать относительные движения друг по отношению к другу. В многокомпонентной системе масс допуски изготовления могут привести к неправильной взаимной ориентации соединенных друг с другом частичных масс системы, например, обоих вибраторов двухкомпонентного вибратора. Неправильная ориентация создает в считываемом сигнале кориолисового гироскопа компонент сигнала, который наложен в квадратуре (смещенным по фазе на 90°) на собственно компонент сигнала, получающийся вследствие приложенной угловой скорости. Как правило, квадратурные компоненты сигнала (квадратурные искажения, квадратурные сигналы, квадратурные ошибки) намного больше, чем сигналы, получаемые вследствие желаемой разрешающей способности частоты вращения, так что разделение обоих компонентов сигнала является затруднительным. Вследствие большой разности компонентов сигнала уже небольшие смещения фазы приводят к отчетливо заметным ошибкам в сигнале угловой скорости (ошибка нулевой точки, искажение).
Из DE 10360962 B4 и DE 10237410 A1 известны способы, при которых при помощи напряжения, приложенного на специальных регулирующих электродах, кориолисову массу поворачивают и/или отклоняют, чтобы уменьшить квадратурное искажение.
В US 6,067,858 описана структура для уменьшения квадратурного искажения, которая состоит из отдельных корректировочных электродов, у которых должны иметь место симметричные расстояния между отдельными электродами. Кроме того, эта форма структуры технологически может быть реализована только при помощи скрытых оксидов.
Задачей, лежащей в основе изобретения, является уменьшить в кориолисовых гироскопах и в системах, состоящих из соединенных друг с другом кориолисовых гироскопов, вклад неправильной ориентации в квадратурное искажение, не нуждаясь в повороте и/или в отклонении кориолисовой массы, и с технологической возможностью отказаться от скрытых оксидов.
Согласно изобретению эта задача решена при помощи кориолисового гироскопа согласно п.1, при помощи системы согласно п.10 и при помощи способа согласно п.п.17 и 21 формулы изобретения. Выгодные усовершенствования соответственно вытекают из зависимых пунктов формулы изобретения.
В соответствии с этим кориолисов гироскоп включает в себя систему масс, в которой могут возбуждаться колебания параллельно первой оси. Система масс может быть выполнена однокомпонентной или включать в себя по меньшей мере две частичные массы. В многокомпонентных системах масс по меньшей мере одна из частичных масс (кориолисов элемент) закреплена таким образом, что может регистрироваться отклонение частичной массы вдоль второй оси, перпендикулярной первой оси и чувствительной оси, вследствие вращательного движения вокруг чувствительной оси, перпендикулярной первой оси. В системе с обратной связью отклонение частичной массы может регистрироваться, например, путем создания восстанавливающих сил для компенсации отклонения.
Кроме того, кориолисов гироскоп согласно изобретению включает в себя по меньшей мере один первый корректировочный модуль и по меньшей мере один второй корректировочный модуль, которые соответственно содержат множество неподвижных корректировочных электродов и множество подвижных корректировочных электродов. Неподвижные корректировочные электроды проходят в направлении первой оси и посредством соответствующих анкерных структур жестко соединены с подложкой, по отношению к которой система масс подвешена с возможностью перемещения. Подвижные корректировочные электроды являются неотъемлемой составной частью системы масс и являются подвижными по отношению к подложке.
Например, кориолисов гироскоп включает в себя первую частичную массу (приводную раму), в которой возбуждают линейные колебания вдоль первой оси, и вторую частичную массу (кориолисову раму, кориолисову массу, регистрирующую раму), подвижно соединенную с первой частичной массой таким образом, что она является подвижной перпендикулярно движению возбуждения, причем может регистрироваться это возможное движение отклонения вдоль направления кориолисовых сил, которые возникают вследствие приложения угловой скорости и движения возбуждения. При этом вторая частичная масса включает в себя подвижные корректировочные электроды, а также набор регистрирующих электродов, который служит для регистрации отклонения второй частичной массы, и опционально, набор электродов для возврата отклонения в исходное положение.
Согласно другому варианту выполнения кориолисов гироскоп включает в себя первую частичную массу (приводную раму), в которой возбуждают линейные колебания вдоль первой оси, вторую частичную массу (кориолисову раму, кориолисову массу), которая закреплена с возможностью отклонения вследствие кориолисовой силы, и третью частичную массу (регистрирующую раму), которая подвижно соединена со второй частичной массой таким образом, что она не может совершать движение возбуждения, однако должна принимать участие в движении отклонения кориолисовой рамы во втором направлении, посредством чего регистрируется отклонение кориолисовой рамы. Другими словами, разделены функциональные модули кориолисова рама и регистрирующая рама. При этом подвижные корректировочные электроды корректировочных модулей являются неотъемлемой составной частью кориолисовой рамы. Наборы электродов для регистрации и/или для возврата в исходное положение присоединены при этом, как правило, к третьей частичной массе, причем при применении раздельных наборов электродов для регистрации и возврата в исходное положение существует также возможность их раздельного расположения на третьей и второй частичных массах.
Корректировочные модули согласно изобретению соответственно включают в себя, например, одинаковое количество первых неподвижных корректировочных электродов и вторых неподвижных корректировочных электродов. Первые неподвижные корректировочные электроды проходят, начинаясь от соответствующей анкерной структуры, вдоль первой оси в первом направлении. Вторые неподвижные корректировочные электроды проходят от соответствующей анкерной структуры во втором направлении, противоположном первому направлению. Соответствующим образом корректировочный модуль может включать в себя одинаковое количество первых и вторых подвижных корректировочных электродов. Первые подвижные корректировочные электроды проходят, начинаясь от исходной точки в пределах периферии той частичной массы, неотъемлемой составной частью которой они являются, во втором направлении, а вторые подвижные корректировочные электроды - в первом направлении.
Расстояние от неподвижного корректировочного электрода до его соответствующих соседних подвижных корректировочных электродов является различным. Таким образом, отношение обоих расстояний следует выбирать не равным 1. При этом для эффективного силового воздействия отношение следует выбирать максимально большим или малым, однако в этом случае возрастает занимаемая площадь. С учетом занимаемой площади, пропорциональной отношению расстояний, и максимально эффективного силового воздействия получается оптимальное отношение расстояний, равное 21/2. Тот подвижный корректировочный электрод, который имеет меньшее расстояние от неподвижного корректировочного электрода, обозначен ниже как подвижный корректировочный электрод, соответствующий неподвижному корректировочному электроду. Первые неподвижные корректировочные электроды каждый раз расположены вдоль второй оси над соответствующими им первыми подвижными корректировочными электродами, в то время как вторые неподвижные корректировочные электроды каждый раз расположены под соответствующими им вторыми подвижными корректировочными электродами. При этом понятия «над» и «под» относятся к направлению вдоль второй оси. Частичная масса, которая включает в себя подвижные корректировочные электроды, сформирована таким образом, что она соответственно служит в качестве первого и второго подвижных корректировочных электродов по отношению к первому или же второму неподвижному корректировочному электроду. Расположение неподвижных корректировочных электродов по отношению к соответствующим им подвижным корректировочным электродам вдоль второй оси может быть также обратным.
В одном варианте выполнения кориолисов гироскоп включает в себя первый и второй корректировочные модули, которые выполнены инвертированными друг по отношению к другу. Опционально кориолисов гироскоп может включать в себя несколько однотипно выполненных первых и/или несколько однотипно выполненных вторых корректировочных модулей, или же несколько пар первых и вторых корректировочных модулей, выполненных инвертированными друг по отношению к другу.
Неподвижные корректировочные электроды и/или подвижные корректировочные электроды могут соответственно иметь перемычки с шириной максимум 10 мкм.
В одном варианте выполнения кориолисов гироскоп содержит по меньшей мере один управляющий модуль, который вырабатывает корректирующее напряжение. Неподвижные корректировочные электроды и подвижные корректировочные электроды соединены по меньшей мере с одним управляющим модулем, при этом различные корректировочные модули могут отдельно управляться или регулироваться при помощи различных корректирующих напряжений. Корректирующие напряжения являются по меньшей мере в течение промежутка времени постоянными, в простейшем случае, постоянными напряжениями, величины которых могут устанавливаться таким образом, что квадратурное искажение минимизируется. Однако возможно также регулирование корректирующих напряжений в зависимости от отклонения перпендикулярно движению возбуждения (направление Y). Электроды корректировочных модулей выполнены таким образом, что при движении подвижных элементов электродов в направлении возбуждения при приложении электрического напряжения в направлении регистрации образуются силы, которые зависят от отклонения в направлении возбуждения.
Кроме того, в изобретении предложена система, содержащая по меньшей мере два соединенных друг с другом кориолисовых гироскопа, при этом каждый кориолисов гироскоп включает в себя систему масс, в которой могут возбуждаться колебания параллельно первой оси, при этом может регистрироваться отклонение системы масс вследствие кориолисовой силы вдоль второй оси, которая проходит перпендикулярно первой оси. При этом система включает в себя по меньшей мере один первый и по меньшей мере один второй корректировочные модули, которые описаны в связи с отдельным кориолисовым гироскопом.
Например, система включает в себя два кориолисовых гироскопа, которые совместно выполнены в виде линейного двойного вибратора, при этом возбуждают противоположные друг другу колебания обоих отдельных вибраторов вдоль первой оси.
В одном варианте выполнения, в котором кориолисовы гироскопы соединены лишь в отношении возбуждения, в каждом отдельном кориолисовом гироскопе соответственно попарно расположены корректировочные модули, выполненные инвертированными друг по отношению к другу.
Если, в противоположность этому, отдельные кориолисовы гироскопы соединены также в отношении регистрации, как это известно, например, из DE 102007030120 A1, то по меньшей мере два отдельных корректировочных модуля, расположенных инвертированно друг по отношению к другу, могут быть произвольно размещены на отдельных кориолисовых гироскопах.
Предложенный в изобретении способ уменьшения квадратурного искажения кориолисова гироскопа согласно изобретению или системы согласно изобретению включает в себя приложение корректирующего напряжения между неподвижными и подвижными корректировочными электродами корректировочных модулей.
Корректирующим напряжением является постоянное напряжение, величину которого устанавливают в зависимости от ориентации и величины подлежащего уменьшению квадратурного искажения. На который по меньшей мере из двух имеющихся корректировочных модулей, инвертированных друг по отношению к другу, подается напряжение, зависит от знака подлежащего компенсации квадратурного искажения.
Альтернативно или дополнительно величина постоянного напряжения может быть установлена в зависимости от заданного изменения собственной частоты системы масс вдоль второй оси. В этом случае на оба попарно имеющихся корректировочных модуля, инвертированных друг по отношению к другу, подают напряжение одинаковой величины. При этом составляющая постоянного напряжения для компенсации квадратурного искажения накладывается в соответствии со знаком на напряжение для подстройки частоты.
Если кориолисов гироскоп включает в себя более двух корректировочных модулей, предпочтительно число, кратное двум, то на корректировочные модули могут подаваться различные напряжения, предпочтительно таким образом, что напряжения в сумме компенсируются. Например, на однотипные корректировочные модули, то есть, корректировочные модули, которые выполнены не инвертированными друг по отношению к другу, могут подаваться напряжения одинаковой величины, но различной полярности.
Изобретение подробнее поясняется ниже в примерном варианте выполнения со ссылкой на прилагаемые чертежи. На чертежах изображено:
фиг.1 - схематический вид сверху кориолисового гироскопа в виде двухкомпонентного отдельного вибратора согласно одному варианту выполнения изобретения,
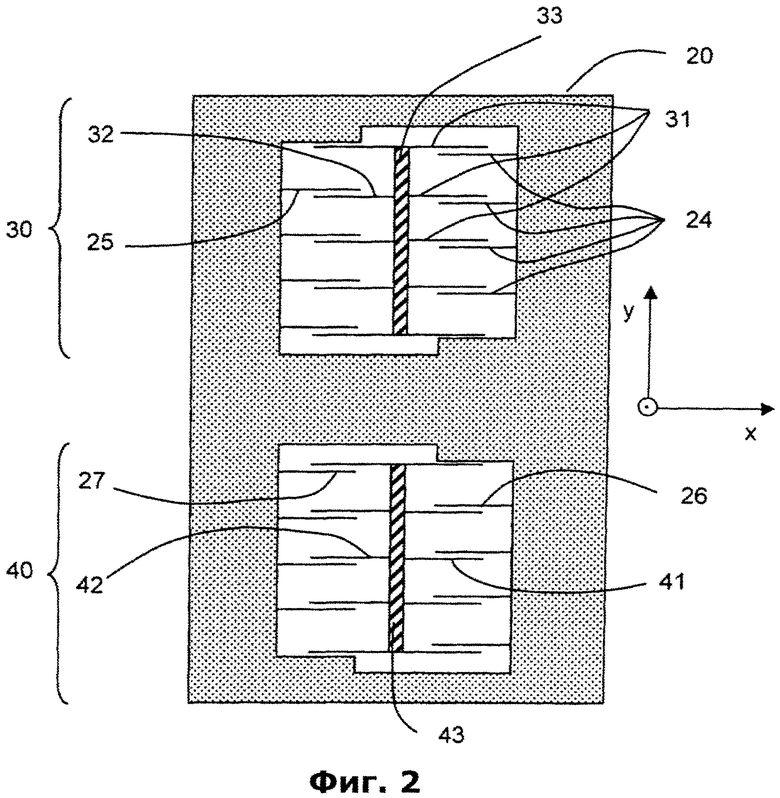
фиг.2 - схематический вид сверху фрагмента фиг.1, включающего в себя корректировочные модули,
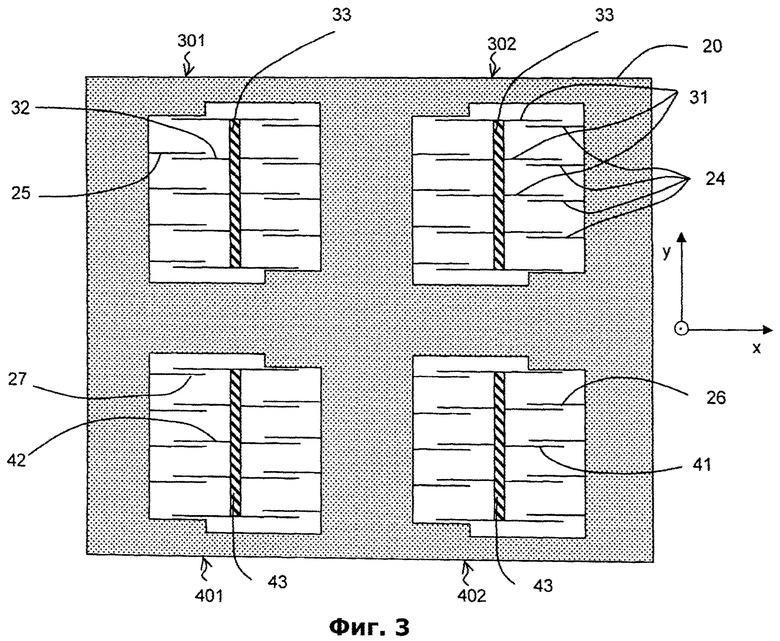
фиг.3 - схематический вид сверху фрагмента кориолисова гироскопа, в котором выполнено несколько однотипных корректировочных модулей,
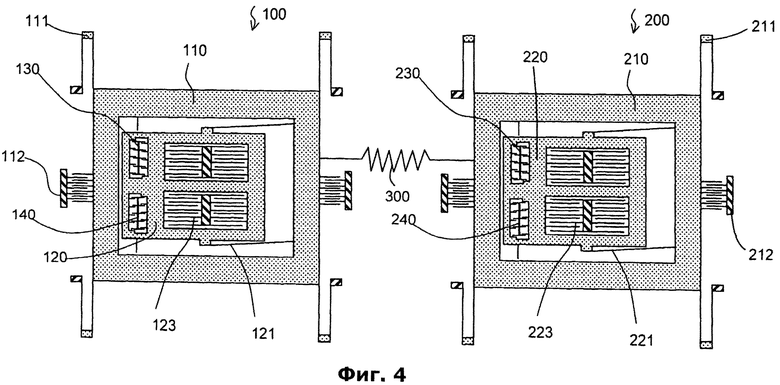
фиг.4 - схематический вид сверху системы, содержащей два соединенных кориолисовых гироскопа согласно следующему варианту выполнения изобретения.
На фиг.1 показано принципиальное строение кориолисова гироскопа 1 согласно одному варианту выполнения, в котором кориолисов гироскоп 1 выполнен в виде линейного однокомпонентного вибратора. Линейный однокомпонентный вибратор предпочтительно изготавливают при помощи процессов травления из кремниевого диска, и он включает в себя первую частичную массу 10 (приводную раму), вторую частичную массу 20 (кориолисову массу), первые пружинные элементы 11 и вторые пружинные элементы 21. Приводная рама 10 через первые пружинные элементы 11 соединена с подложкой, которая находится под частичными массами 10, 20. Первые пружинные элементы выполнены таким образом, что первая частичная масса 10 вместе со второй частичной массой 20 может колебаться вдоль первой оси (направление X). Кориолисова масса 20 через вторые пружинные элементы 21 соединена с первой частичной массой 10 и подвешена таким образом, что она может колебаться по отношению к первой частичной массе 10 вдоль второй оси (направление Y), перпендикулярной первой оси.
При этом конфигурация пружинных элементов 21 не ограничена специфическим вариантом выполнения.
Первая и вторая частичные массы 10, 20 образуют систему масс кориолисова гироскопа 1. Кроме того, кориолисов гироскоп включает в себя неподвижные возбуждающие электроды 12 и неподвижные регистрирующие электроды 23, которые механически соединены с подложкой, однако электрически изолированы от нее. Под наименованием «подложка» понимают механическую не колеблющуюся структуру, в которой «заделаны» частичные массы 10 и 20, например, не колеблющуюся часть кремниевого диска или его отдельного элемента. Кроме того, кориолисов гироскоп включает в себя подвижные возбуждающие электроды 13, которые являются неотъемлемой составной частью первой частичной массы 10, а также подвижные регистрирующие электроды 22, которые в этом варианте выполнения являются неотъемлемой составной частью второй частичной массы 20. В этом варианте выполнения возбуждающие электроды 12 и 13 выполняют две функции, во-первых, функцию возбуждения, а во-вторых, функцию регистрации движения первой частичной массы в первом направлении (ось X обозначенной системы координат), причем для этого возбуждающие электроды надлежащим образом подвергают электронному управлению. В другом варианте выполнения функции возбуждающих электродов могут быть разделены путем их двойного выполнения.
Как правило, к неподвижным возбуждающим электродам 12 прикладывают переменное напряжение, в то время как подвижные возбуждающие электроды 13, которые жестко соединены с приводной рамой и движутся вместе с ней, электрически представляют собой противоположный полюс. Вследствие возникающих электростатических сил возбуждаются колебания приводной рамы 10 вдоль направления X. Через вторые пружинные элементы 21 это движение передается на кориолисову массу 20. Благодаря вертикальной ориентации первых пружинных элементов 11 предотвращено движение приводной рамы 10 вдоль второй оси (направление Y), которая проходит перпендикулярно первой оси. Однако благодаря по существу горизонтальной ориентации вторых пружинных элементов 21 кориолисовой массой 20 могут совершаться вертикальные колебания в направлении Y. Если вследствие вращения вокруг чувствительной оси, расположенной перпендикулярно плоскости чертежа, возникают соответствующие кориолисовы силы, то возбуждаются колебания кориолисовой массы 20 в направлении Y.
Посредством подвижных регистрирующих электродов 22, которые жестко соединены с кориолисовой массой 20 и движутся вместе с ней, и неподвижных регистрирующих электродов 23 регистрируют и считывают вызванное кориолисовыми силами движение в направлении Y, причем это движение является мерой приложенной угловой скорости. Альтернативно описанному способу без обратной связи, движение второго вибратора 20 в направлении Y может быть предотвращено посредством регулирующего контура и соответствующих задерживающих электродов, причем при таком способе с обратной связью посредством электрического напряжения, требующегося для предотвращения движения в направлении Y, измеряют необходимые для этого силы, которые представляют собой меру приложенной угловой скорости. В описанном здесь варианте выполнения регистрирующие электроды 22 и 23 выполняют в способе с обратной связью две функции, а именно, собственно функцию регистрации и функцию задерживания, для чего их подвергают соответствующему электронному управлению. Однако регистрирующие электроды могут быть также разделены на два подмодуля одинаковой конструкции, и для каждого подмодуля назначена одна из обеих функций.
Наряду с вариантом выполнения, показанным на фиг.1, возможны также другие варианты выполнения кориолисова гироскопа. Например, регистрация движения кориолисовой массы в направлении Y может осуществляться на отдельном теле, которое само не совершает движения в направлении X, однако в направлении Y совершает движение совместно с кориолисовой массой при помощи соответствующих пружинных узлов, и таким образом, выполняет только функцию регистрации, и поэтому может быть также обозначено как регистрирующая рама. Как правило, при работе гироскопа по способу с обратной связью функции регистрации и возврата в исходное положение осуществляют на отдельном теле (регистрирующей раме), однако обе функции могут быть также распределены между кориолисовой массой и отдельным телом.
В следующем варианте выполнения кориолисов гироскоп может включать в себя лишь одну колеблющуюся массу, которую ниже также следует понимать как «кориолисову массу». При этом функции приводной рамы, кориолисовой массы и функция регистрации, а также, в способе с обратной связью, функция задерживания, должны выполняться одной единственной структурой.
Как показано на фиг.4, несколько кориолисовых гироскопов, показанных на фиг.1, могут быть объединены с образованием одного единственного чувствительного элемента. При этом, например, колебания двух кориолисовых гироскопов вдоль общей оси колебаний могут быть смещены в противофазе друг относительно друга. Тем самым может быть уменьшена чувствительность объединенной системы по отношению к внешним помехам, или же к помехам, которые передаются через саму объединенную систему в подложку, в которой выполнены однокомпонентные вибраторы. Разумеется, соединение двух кориолисовых гироскопов может выходить за пределы соединения, показанного на фиг.4, так что в зависимости от варианта выполнения, друг с другом соединены не только приводные массы, но и кориолисовы массы или регистрирующие рамы.
В том случае, когда движение возбуждения ориентировано не точно перпендикулярно движению регистрации, часть получающихся вследствие движения возбуждения ускоряющих сил, которая, например, может быть на 9 десятичных порядков больше по сравнению с кориолисовым ускорением, передается в направление регистрации, и это означает, что кориолисова сила, образованная вследствие вращательного движения, очень быстро становится лишь долей силы, которая вызывает движение регистрации, что приводит к ошибке при измерении угловой скорости. В частности, при очень малых угловых скоростях ошибки ориентации обеих частичных масс друг по отношению к другу или отклонение направления движения кориолисовой массы по отношению к координатной системе, заданной возбуждающими электродами и неподвижными регистрирующими электродами, приводит к ошибке измерения, которая отрицательным образом влияет на функционирование кориолисова гироскопа. В качестве примера для иллюстрации возможности этого механизма ошибок на фиг.1 и 4 вторые пружинные элементы 21 вследствие производственных допусков ориентированы несколько наклонно по отношению к движению возбуждения вдоль оси X. Так как кориолисовы силы непосредственно зависят от скорости движения возбуждения, то они находятся в фазовом положении 90° (в квадратуре) по отношению к ускоряющим силам, получающимся вследствие движения возбуждения, которые непосредственно связаны с амплитудой движения возбуждения или же с его второй производной по времени.
Для уменьшения или компенсации этой ошибки, которую также называют квадратурным искажением, показанный на фиг.1 кориолисов гироскоп содержит первый и второй корректировочные модули 30 и 40, которые всегда имеются попарно, по меньшей мере по одной паре на кориолисову массу, и которые соответственно включают в себя неподвижные корректировочные электроды, механически соединенные с подложкой, однако электрически от нее изолированные, и подвижные корректировочные электроды, электрически и механически жестко соединенные с кориолисовой массой. В варианте выполнения, показанном на фиг.1, неподвижные корректировочные электроды первого корректировочного модуля 30 электрически соединены с первым управляющим модулем 50, а неподвижные корректировочные электроды второго корректировочного модуля 40 электрически соединены со вторым управляющим модулем 60, при этом на неподвижных корректировочных электродах корректировочных модулей 30 и 40 соответственно поддерживается или же регулируется определенный электрический потенциал. Первый управляющий модуль 50 подает на первый корректировочный модуль 30 первое корректирующее напряжение, в то время как второй управляющий модуль 60 подает на второй корректировочный модуль 40 второе корректирующее напряжение. Корректировочные модули 30 и 40 соединены с соответствующими управляющими модулями 50 и 60 через электрические соединительные линии 51 и 61, причем соединительные линии 51 и 61 электрически изолированы от других составных частей кориолисова гироскопа. Электрические соединительные линии 51, 61 могут быть, например, выполнены в виде электропроводящих областей в подложке или в виде проводящих дорожек из электропроводящего материала на подложке.
В показанном на фиг.1 варианте выполнения кориолисова гироскопа корректировочные модули 30 и 40 расположены зеркально симметрично по отношению к средней линии 28 кориолисовой массы 20. Однако оба корректировочных модуля 30 и 40 могут быть также расположены над средней линией 28 или под ней, и/или на одинаковых или различных расстояниях от средней линии 28. Положение корректировочных модулей 30 и 40 по отношению к регистрирующим электродам 22, 23 также может произвольно согласовываться с конструкцией кориолисова гироскопа. Так например, один или оба корректировочных модуля могут быть расположены справа от регистрирующих электродов 22, 23 или над ними, или же под ними. Возможно также расположение между двумя частичными областями регистрирующих электродов 22, 23, как это показано на фиг.1.
На фиг.2 детально показаны корректировочные модули 30 и 40 линейного однокомпонентного вибратора 1. Каждый корректировочный модуль 30, 40 состоит из множества первых неподвижных корректировочных электродов 31 и 41 и вторых неподвижных корректировочных электродов 32 и 42, которые жестко соединены с подложкой. Кроме того, каждый корректировочный модуль 30 и 40 содержит множество первых подвижных корректировочных электродов 24 и 26 вторых подвижных корректировочных электродов 25 и 27, которые выполнены как одно целое с кориолисовой массой 20. Поэтому подвижные корректировочные электроды 24, 25, 26, 27 перемещаются по отношению к неподвижным корректировочным электродам 31, 32 или же 41, 42, когда кориолисова масса 20 приводится в движение.
Если к неподвижным корректировочным электродам 31, 32 или же 41, 42 приложено постоянное напряжение, то вследствие движения возбуждения возникают электростатические силы, которые прямо пропорциональны амплитуде движения возбуждения и являются ее второй производной по времени, и которые приводят к уменьшению квадратурной ошибки. Для этого величины постоянных напряжений выбирают в соответствии с величиной и ориентацией подлежащего уменьшению или компенсации квадратурного сигнала. Кроме того, при помощи прикладываемого постоянного напряжения можно также оказывать влияние на собственную частоту кориолисовой массы 20 в направлении Y, что дополнительно может использоваться для балансировки или же целенаправленного согласования собственных частот возбуждения и считывания.
При этом образующиеся силы имеют в первую очередь лишь силовые компоненты, зависящие от X или от Y. Силовой компонент, зависящий от X, приводит к отрицательной жесткости пружины, которая противодействует жесткости вторых пружинных элементов 21 и, таким образом, приводит к уменьшению собственной частоты кориолисовой массы 20 в направлении регистрации (направление Y). Это силовое воздействие может быть минимизировано посредством соответствующего выбора длины перекрытия в состоянии покоя неподвижных корректировочных электродов 31, 32 или же 41, 42 по отношению к подвижным корректировочным электродам 24, 25 или же 26, 27. Альтернативно силовой компонент, зависящий от Y, может также использоваться для желаемого согласования частоты возбуждения и собственной частоты кориолисовой массы в направлении регистрации.
Силовое воздействие прямо пропорционально движению отклонения кориолисовой массы в направлении X, вследствие чего оно имеет фиксированное фазовое положение 90° по отношению к скорости возбуждения. Таким образом, силовое воздействие от корректировочного электрода не претерпевает поворота фазы, вследствие чего предотвращается его вклад в искажение. Кроме того, это означает, что при периодическом изменении фазового положения в передаточной функции от движения возбуждения к движению считывания, которое идеальным образом должно составлять 90°, однако не обязательно должно быть таким, корректирующие силы совместно вращаются в одинаковой фазе вместе с квадратурными силами и, таким образом, компенсирующее действие сохраняется.
Следующим аспектом является то, что, например, при расположении, аналогичном показанному на фиг.4, однако при дополнительном присоединении кориолисовых масс или же регистрирующих рам, вследствие производственных допусков может возникнуть ситуация, при которой невозможна компенсация квадратурной ошибки путем отклонения кориолисовых масс в направлении Y. Однако квадратурная ошибка всегда может компенсироваться при помощи описанной здесь формы корректировочных электродов.
Силовые компоненты для уменьшения или компенсации квадратурной ошибки не зависят от перекрытия неподвижных корректировочных электродов 31, 32 или же 41, 42 с подвижными корректировочными электродами 24, 25 или же 26, 27. Поэтому корректировочные модули 30 и 40 могут быть выполнены очень малыми. Так например, требуемая минимальная длина перекрытия примерно вдвое больше амплитуды колебаний возбуждения плюс определенная длина для достижения силового воздействия, линейно зависящего от амплитуды. Так например, для амплитуды возбуждения примерно 10 мкм возможна длина перекрытия примерно 15 мкм при общей длине корректировочных электродов от 30 до 35 мкм. Как правило, это представляет собой примерно одну десятую часть размера, который требуется для согласования частот между частотой возбуждения и собственной частотой регистрации.
Как детально показано на фиг.2, попарно имеющиеся корректировочные модули 30, 40 включают в себя множество неподвижных корректировочных электродов 31, 32 или же 41, 42 и множество подвижных корректировочных электродов 24, 25 или же 26, 27. Неподвижные корректировочные электроды 31, 32 или же 41, 42 при помощи общей анкерной структуры 33 или же 43 соответственно механически жестко соединены с подложкой, однако электрически изолированы от нее.
Размеры анкерной структуры могу быть согласованы со способом изготовления кориолисова гироскопа. Поверхность основания анкерной структуры находится в диапазоне от 2500 мкм2 до 0,04 мм2. Принципиально желательны по возможности малые анкерные структуры, так как они образуют дополнительную занимаемую площадь и, как следствие, увеличивают общую конструкцию. Нижняя граница поверхности основания определяется технологическими возможностями, а также способом изготовления кориолисова гироскопа. В частности, например, если анкерные структуры соединены со своей подложкой при помощи кремниевого сплавного соединения (SFB), то анкерная структура может быть выполнена с размерами по меньшей мере 7×70 мкм, не теряя при этом преимущества малой занимаемой площади для корректировочных электродов благодаря их небольшой требуемой длине перекрытия. Благодаря небольшим требуемым общим длинам корректировочных электродов они, в зависимости от способа изготовления, могут также оставаться очень узкими, например, до 5 мкм или даже меньше. Минимальная ширина корректировочных электродов также ограничена технологическими возможностями, при этом также играют роль механические аспекты (например, изгиб электродов при работе). Таким образом, несмотря на относительно большую анкерную структуру, в общей сложности может быть достигнут малый размер корректировочных модулей 30 и 40. Приведенный выше размер анкерной структуры является, в частности, преимуществом для способа изготовления, при котором для соединения с подложкой изготовленных отдельно от нее неподвижных структур, например, анкерных структур и неподвижных корректировочных электродов, используют метод кремниевого сплавного соединения. Однако, неподвижные структуры могут быть также изготовлены непосредственно в подложке посредством процесса травления или в слое, нанесенном на подложку.
Первые неподвижные корректировочные электроды 31 и 41 проходят от анкерной структуры 33 или же 43 в первом направлении (положительное направление X), в то время как вторые неподвижные корректировочные электроды 32 и 42 проходят от анкерной структуры 33 или же 43 во втором направлении (отрицательное направление X). Второе направление противоположно первому направлению. Первые подвижные корректировочные электроды 24 и 26 проходят от кориолисовой массы 20 во втором направлении, в то время как вторые подвижные корректировочные электроды 25 и 27 проходят от кориолисовой массы 20 в первом направлении. Таким образом, первые подвижные корректировочные электроды 24 и 26 проходят в промежуточные пространства, образованные между отдельными первыми неподвижными корректировочными электродами 31 и 41, в то время как вторые подвижные корректировочные электроды 25 и 27 проходят в промежуточные пространства, образованные между отдельными вторыми неподвижными корректировочными электродами 32 и 42. Получается гребневидная структура корректировочных электродов, в которой неподвижный корректировочный электрод и подвижный корректировочный электрод соответственно расположены друг напротив друга и отделены друг от друга в направлении Y зазором.
В корректировочном модуле количество неподвижных корректировочных электродов и подвижных корректировочных электродов, которые проходят в первом направлении, предпочтительно равно количеству неподвижных корректировочных электродов и подвижных корректировочных электродов, которые проходят во втором направлении.
Каждый из неподвижных корректировочных электродов 31, 32 или же 41, 42 соответствует именно одному из подвижных корректировочных электродов 24, 25 или же 26, 27. Одна часть кориолисовой массы 20 действует в качестве подвижного корректировочного электрода, который соответствует одному неподвижному корректировочному электроду. Например, в первом корректировочном модуле 30 левая верхняя часть кориолисовой массы 20 действует в качестве подвижного корректировочного электрода по отношению к самому верхнему неподвижному корректировочному электроду 32, в то время как правая нижняя часть кориолисовой массы 20 действует в качестве подвижного корректировочного электрода по отношению к самому нижнему неподвижному корректировочному электроду 31. Расстояние между неподвижным корректировочным электродом и соответствующим ему подвижным корректировочным электродом, обозначенное ниже как «величина зазора», меньше, чем расстояние между двумя однотипными неподвижными корректировочными электродами или двумя однотипными подвижными корректировочными электродами, и меньше, чем расстояние от соответствующего неподвижного корректировочного электрода до другого соседнего подвижного корректировочного электрода. Благодаря асимметричному расположению подвижных корректировочных электродов 24 и 26, а также подвижных корректировочных электродов 25 и 27, по отношению к соответствующим неподвижным корректировочным электродам 31 и 41, а также 32 и 42, при приложении постоянного напряжения образуется сила, которая прямо пропорциональна отклонению корректировочных электродов вдоль первой оси (ось X). Расположенные зеркально симметрично по отношению к оси X корректировочные модули 30 и 40 обеспечивают возможность зависящей от знака компенсации квадратуры. Различные расстояния от подвижного корректировочного электрода 24, 25, 26 или 27 до соседних с ним неподвижных корректировочных электродов 31, 32, 41 или 42 обусловлены технологией изготовления и обеспечивают возможность минимальной поверхности анкерных структур. Кроме того, они задают ориентацию компенсации квадратуры.
В корректировочном модуле 30 проходящие в первом направлении неподвижные корректировочные электроды каждый раз расположены над соответствующими им подвижными корректировочными электродами, в то время как проходящие во втором направлении неподвижные корректировочные электроды расположены под соответствующими им подвижными корректировочными электродами. При этом понятие «над» означает от соответствующих подвижных корректировочных электродов в третьем направлении (положительное направление Y), в то время как понятие «под» означает от соответствующего подвижного корректировочного электрода в четвертом направлении (отрицательное направление Y), которое противоположно третьему направлению. Третье и четвертое направления проходят вдоль второй оси (ось Y) перпендикулярно первому и второму направлениям.
В примерном варианте выполнения на фиг.2 расположение друг относительно друга неподвижных и подвижных корректировочных электродов в корректировочном модуле 40 выполнено зеркально симметричным по отношению к оси X.
Неподвижные корректировочные электроды второго корректировочного модуля 40 расположены по отношению к соответствующим им подвижным корректировочным электродам точно противоположно их расположению в первом корректировочном модуле 30. При произвольном приложенном напряжении и движении кориолисовой массы 20 вдоль первой оси (ось X) сила, действующая от второго корректировочного модуля 40, ориентирована противоположно силе, действующей от первого корректировочного модуля 30.
Согласно изобретению кориолисова масса 20 содержит оба корректировочных модуля 30 и 40 при инвертированном их расположении друг относительно друга, показанном на фиг.2. При этом несущественно, расположен ли корректировочный модуль 30 над модулем 40 или под ним (в направлении Y), или инвертирован ли каждый корректировочный модуль в направлении Y (зеркально отображен вокруг оси X). Соответствующее расположение оказывает влияние лишь на подачу напряжения на корректировочный модуль.
Если кориолисов гироскоп включает в себя дополнительные корректировочные модули, то на них может подаваться одинаковое постоянное напряжение, напряжения одинаковой величины и различной полярности, напряжения одинаковой полярности и различной величины или напряжения с различными величинами и полярностью. Постоянное напряжение может также подаваться лишь на один из корректировочных модулей. Другие корректировочные модули могут быть заземлены или находиться в свободном состоянии.
На фиг.3 показан фрагмент следующего варианта выполнения, в котором первый корректировочный модуль и второй корректировочный модуль соответственно выполнены двойными. На фиг.3 показан фрагмент кориолисовой массы 20, аналогично как на фиг.2. В этом варианте выполнения кориолисов гироскоп содержит четыре корректировочных модуля 301, 302, 401 и 402. Корректировочные модули 301 и 302 выполнены однотипными и соответствуют первому корректировочному модулю 30, который показан на фиг.2. Корректировочные модули 401 и 402 также выполнены однотипными и соответствуют второму корректировочному модулю 40, который показан на фиг.2. Корректировочные модули 301 и 302 выполнены инвертированными по отношению к корректировочным модулям 401 и 402. Корректировочные модули 301 и 401 образуют первую пару корректировочных модулей, выполненных инвертированными друг по отношению к другу, в то время как корректировочные модули 302 и 402 образуют вторую пару корректировочных модулей, выполненных инвертированными друг по отношению к другу.
На корректировочные модули 301 и 302 могут подаваться постоянные напряжения противоположной полярности с одинаковой величиной. То же самое имеет силу для корректировочных модулей 401 и 402. Это уменьшает эффекты электрической связи, например уравнительные токи. Этот эффект действует как в способе без обратной связи, так и в способе с обратной связью, вследствие всегда имеющего место остаточного перемещения в результате регулирования.
Эффектом кориолисова гироскопа согласно изобретению является его независимость от выполнения пружинных элементов 21. Так как кориолисова масса 20 не должна отклоняться или поворачиваться, то могут применяться различные типы пружинных элементов 21. В частности, пружинные элементы 21 могут быть выполнены нечувствительными к ускорению, вследствие чего кориолисов гироскоп приобретает более высокую нечувствительность к вибрации. При этом квадратурный сигнал определяется лишь наклонным положением пружинных элементов 21 и не зависит от их отклонения или же их нагружения ускоряющими силами, действующими от колебаний возбуждения.
Следующее значительное преимущество состоит в том, что на один корректировочный модуль требуется лишь одна сопряженная анкерная структура, вследствие чего конструкция и процесс изготовления упрощаются.
Описанные корректировочные модули могут применяться для систем, состоящих из одного или нескольких вибраторов, и для систем, которые по отношению к движению возбуждения и/или к движению регистрации полностью замкнуты, частично замкнуты или открыты. В этом смысле замкнутое движение означает, что возникающие вследствие этого движения ускорения и моменты взаимно уничтожаются в наружном направлении.
Такие корректировочные модули могут также применяться в объединенных системах, состоящих из нескольких кориолисовых гироскопов, при этом расположение отдельных кориолисовых гироскопов является несущественным для принципа функционирования корректировочных модулей. Например, в объединенной системе, состоящей из двух кориолисовых гироскопов, движение возбуждения одного кориолисова гироскопа может быть сдвинуто по фазе на 180°° по отношению к движению возбуждения другого кориолисова гироскопа. При конструкции, состоящей из четырех кориолисовых гироскопов, в которой движения возбуждения соответственно двух кориолисовых гироскопов сдвинуты по фазе на 180° друг по отношению к другу, отдельные кориолисовы гироскопы могут быть, например, расположены последовательно или попарно друг с другом. В системах с фиксированной связью в отношении регистрации корректировочные модули или же их подмодули могут произвольно распределяться по различным кориолисовым массам. Таким образом, может быть уменьшено количество проводящих дорожек, которые должны подводиться к кориолисову гироскопу.
На фиг.4 показан вариант выполнения такой объединенной системы. Объединенная система включает в себя, например, ровно два кориолисовых гироскопа 100 и 200, каждый из которых выполнен в соответствии с вариантом, показанным на фиг.1, и которые соединены друг с другом в отношении движения возбуждения при помощи механического соединительного элемента 300, например, пружины. При этом однотипные конструкционные элементы соответствующих кориолисовых гироскопов обозначены соответствующими номерами позиций, которые были пояснены со ссылками на фиг.1. В варианте выполнения, показанном на фиг.4, каждый кориолисов гироскоп 100 или 200 попарно содержит корректировочные модули 130 и 140 или же 230 и 240.
В варианте выполнения, в котором связана возможность движения обеих кориолисовых масс 120 и 220 в направлении Y, возможно также, что первый кориолисов гироскоп 100 содержит лишь корректировочный модуль 130, в то время как второй кориолисов гироскоп 200 содержит лишь корректировочный модуль 240, или лишь один из кориолисовых гироскопов, например, гироскоп 100, содержит оба корректировочных модуля 130 и 140, а другой кориолисов гироскоп, например, гироскоп 200, не содержит корректировочных модулей.
Как описано со ссылками на фиг.1, на корректировочные модули 130, 140, 230 и 240 при помощи по меньшей мере одного управляющего модуля (не показан) в простейшем случае соответственно подают постоянное корректирующее напряжение. При этом неподвижные корректировочные электроды корректировочных модулей 130, 140, 230 и 240 при помощи электрических соединительных линий соединены по меньшей мере с одним управляющим модулем.
Кориолисов гироскоп (1) включает в себя систему масс, в которой могут возбуждаться колебания параллельно первой оси, при этом может регистрироваться отклонение системы масс вследствие кориолисовой силы вдоль второй оси, которая проходит перпендикулярно первой оси, и по меньшей мере один первый корректировочный модуль (30) и по меньшей мере один второй корректировочный модуль (40), которые соответственно содержат множество неподвижных корректировочных электродов (31, 32, 41, 42) и подвижных корректировочных электродов (24, 25, 26, 27), при этом неподвижные корректировочные электроды (31, 32, 41, 42) проходят в направлении первой оси и жестко соединены с подложкой посредством соответствующих анкерных структур (33, 43), а подвижные корректировочные электроды (24, 25, 26, 27) образуют часть системы масс. Способ уменьшения квадратурного искажения такого кориолисова гироскопа (1) включает в себя подачу на корректировочные модули (30, 40) по меньшей мере в течение промежутка времени постоянных корректирующих напряжений. Технический результат заключается в снижении искажений сигнала в кориолисовом гироскопе или системе кориолисовых гироскопов за счет уменьшения вклада неправильной ориентации элементов в квадратурные искажения. 4 н. и 12 з.п. ф-лы, 4 ил.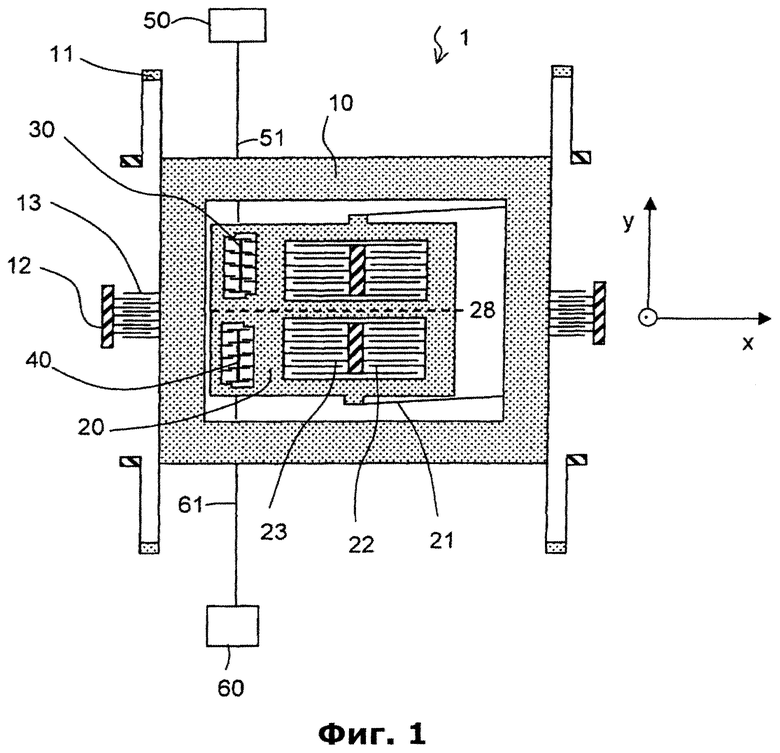
1. Кориолисов гироскоп (1), содержащий
- систему масс, выполненную с возможностью возбуждения колебаний параллельно первой оси, при этом обеспечена возможность регистрации отклонения системы масс вследствие кориолисовой силы вдоль второй оси, которая проходит перпендикулярно первой оси, и
- по меньшей мере один первый корректировочный модуль (30) и один второй корректировочный модуль (40), которые соответственно включают в себя множество неподвижных корректировочных электродов (31, 32, 41, 42) и подвижных корректировочных электродов (24, 25, 26, 27),
при этом неподвижные корректировочные электроды (31, 32, 41, 42) проходят в направлении первой оси и жестко соединены с подложкой посредством соответствующих анкерных структур (33, 43), а подвижные корректировочные электроды (24, 25, 26, 27) образуют часть системы масс,
каждому неподвижному корректировочному электроду (31, 32, 41, 42) соответствует подвижный корректировочный электрод (24, 25, 26, 27), при этом расстояние от каждого неподвижного корректировочного электрода (31, 32, 41, 42) до соответствующего ему подвижного корректировочного электрода (24, 25, 26, 27) меньше, чем расстояние от каждого неподвижного корректировочного электрода (31, 32, 41, 42) до другого соседнего подвижного корректировочного электрода (24, 25, 26, 27);
первые неподвижные корректировочные электроды (31, 41) первого корректировочного модуля (30) и второго корректировочного модуля (40) проходят от соответствующих анкерных структур (33, 43) вдоль первой оси в первом направлении, а вторые неподвижные корректировочные электроды (32, 42) первого корректировочного модуля (30) и второго корректировочного модуля (40) проходят от соответствующих анкерных структур (33, 43) вдоль первой оси во втором направлении, при этом второе направление противоположно первому направлению;
первые подвижные корректировочные электроды (24, 26) проходят от системы масс вдоль первой оси во втором направлении, а вторые подвижные корректировочные электроды (25, 27) проходят от системы масс вдоль первой оси в первом направлении;
в первом корректировочном модуле (30) каждый первый неподвижный корректировочный электрод (31), если смотреть от соответствующего ему первого подвижного корректировочного электрода (24), расположен вдоль второй оси в третьем направлении, в то время как каждый второй неподвижный корректировочный электрод (32), если смотреть от соответствующего ему второго подвижного корректировочного электрода (25), расположен вдоль второй оси в четвертом направлении, причем четвертое направление противоположно третьему направлению; и
во втором корректировочном модуле (40) каждый первый неподвижный корректировочный электрод (41), если смотреть от соответствующего ему первого подвижного корректировочного электрода (26), расположен вдоль второй оси в четвертом направлении, в то время как каждый второй неподвижный корректировочный электрод (42), если смотреть от соответствующего ему второго подвижного корректировочного электрода (27), расположен вдоль второй оси в третьем направлении,
отличающийся тем, что
первые и вторые неподвижные корректировочные электроды одного и того же корректировочного модуля (30, 40) проходят от общей анкерной структуры (33, 43).
2. Кориолисов гироскоп по п. 1, отличающийся тем, что система масс кориолисова гироскопа (1) состоит из первой частичной массы (10) и второй частичной массы (20), при этом обеспечена возможность регистрации отклонения второй частичной массы (20) вследствие кориолисовой силы,
причем подвижные корректировочные электроды (24, 25, 26, 27) являются неотъемлемой составной частью второй частичной массы (20).
3. Кориолисов гироскоп по одному из пп. 1-2, отличающийся тем, что возможность регистрации отклонения системы масс вследствие кориолисовой силы реализована посредством образования восстанавливающих сил для компенсации отклонения.
4. Кориолисов гироскоп по одному из пп. 1-2, отличающийся тем, что
- множество неподвижных корректировочных электродов (31, 32, 41, 42) соответственно содержит одинаковое количество первых неподвижных
корректировочных электродов (31, 41) и вторых неподвижных корректировочных электродов (32, 42), и
- множество подвижных корректировочных электродов (24, 25, 26, 27) соответственно содержит одинаковое количество первых подвижных корректировочных электродов (24, 26) и вторых подвижных корректировочных электродов (25, 27).
5. Кориолисов гироскоп по п. 1, отличающийся тем, что кориолисов гироскоп (1) включает в себя несколько однотипно выполненных первых корректировочных модулей (30) и/или несколько однотипно выполненных вторых корректировочных модулей (40).
6. Кориолисов гироскоп по п. 5, отличающийся тем, что кориолисов гироскоп (1) включает в себя одинаковое количество первых и вторых корректировочных модулей (30, 40).
7. Кориолисов гироскоп по одному из пп. 1-2, отличающийся тем, что неподвижные корректировочные электроды (31, 32, 41, 42) и/или подвижные корректировочные электроды (24, 25, 26, 27) соответственно имеют ширину, составляющую максимум 10 мкм.
8. Кориолисов гироскоп по одному из пп. 1-2, включающий в себя, кроме того, по меньшей мере один управляющий модуль (50, 60), который электрически соединен с корректировочными модулями (30, 40) и предназначен для того, чтобы подавать на них по меньшей мере в течение промежутка времени постоянные корректирующие напряжения.
9. Система, содержащая по меньшей мере два кориолисовых гироскопа (100, 200), которые соединены друг с другом и соответственно включают в себя систему масс, выполненную с возможностью возбуждения колебаний параллельно первой оси, при этом обеспечена возможность регистрации отклонения системы масс вследствие кориолисовой силы вдоль второй оси, которая проходит перпендикулярно первой оси,
по меньшей мере один первый корректировочный модуль (130, 230) и по меньшей мере один второй корректировочный модуль (140, 240), которые соответственно содержат множество неподвижных корректировочных электродов (31, 32, 41, 42) и подвижных корректировочных электродов (24, 25, 26, 27),
при этом неподвижные корректировочные электроды (31, 32, 41, 42) проходят в направлении первой оси и жестко соединены с подложкой посредством соответствующих анкерных структур (33, 43), а подвижные корректировочные электроды (24, 25, 26, 27) образуют часть системы масс по меньшей мере одного из по меньшей мере двух кориолисовых гироскопов (100, 200), причем
каждому неподвижному корректировочному электроду (31, 32, 41, 42) соответствует подвижный корректировочный электрод (24, 25, 26, 27), при этом расстояние от каждого неподвижного корректировочного электрода (31, 32, 41, 42) до соответствующего ему подвижного корректировочного электрода (24, 25, 26, 27) меньше, чем расстояние от каждого неподвижного корректировочного электрода (31, 32, 41, 42) до другого соседнего подвижного корректировочного электрода (24, 25, 26, 27);
первые неподвижные корректировочные электроды (31, 41) первого корректировочного модуля (30) и второго корректировочного модуля (40) проходят от соответствующих анкерных структур (33, 43) вдоль первой оси в первом направлении, а вторые неподвижные корректировочные электроды (32, 42) первого корректировочного модуля (30) и второго корректировочного модуля (40) проходят от соответствующих анкерных структур (33, 43) вдоль первой оси во втором направлении, при этом второе направление противоположно первому направлению;
первые подвижные корректировочные электроды (24, 26) проходят от системы масс вдоль первой оси во втором направлении, а вторые подвижные корректировочные электроды (25, 27) проходят от системы масс вдоль первой оси в первом направлении;
в первом корректировочном модуле (30) каждый первый неподвижный корректировочный электрод (31), если смотреть от соответствующего ему первого подвижного корректировочного электрода (24), расположен вдоль второй оси в третьем направлении, в то время как каждый второй неподвижный корректировочный электрод (32), если смотреть от соответствующего ему второго подвижного корректировочного электрода (25), расположен вдоль второй оси в четвертом направлении, при этом четвертое направление противоположно третьему направлению, и
во втором корректировочном модуле (40) каждый первый неподвижный корректировочный электрод (41), если смотреть от соответствующего ему первого подвижного корректировочного электрода (26), расположен вдоль второй оси в четвертом направлении, в то время как каждый второй неподвижный корректировочный электрод (42), если смотреть от соответствующего ему второго подвижного корректировочного электрода (27), расположен вдоль второй оси в третьем направлении,
отличающаяся тем, что
первые и вторые неподвижные корректировочные электроды одного и того же корректировочного модуля (30, 40) проходят от общей анкерной структуры (33, 43).
10. Система по п. 9, отличающаяся тем, что
- множество неподвижных корректировочных электродов (31, 32, 41, 42) соответственно имеет одинаковое количество первых неподвижных корректировочных электродов (31, 41) и вторых неподвижных корректировочных электродов (32, 42), и
- множество подвижных корректировочных электродов (24, 25, 26, 27) соответственно имеет одинаковое количество первых подвижных корректировочных электродов (24, 26) и вторых подвижных корректировочных электродов (25, 27).
11. Система по одному из пп. 9 или 10, отличающаяся тем, что
- по меньшей мере два кориолисовых гироскопа (100, 200) соединены друг с другом в отношении движения возбуждения, которое возбуждает колебания системы масс параллельно первой оси, и
- каждый кориолисов гироскоп (100, 200) включает в себя по меньшей мере один первый корректировочный модуль (130, 230) и по меньшей мере один второй корректировочный модуль (140, 240).
12. Система по п. 11, отличающаяся тем, что
- по меньшей мере один первый корректировочный модуль (130) первого кориолисова гироскопа (100) выполнен однотипно по отношению по меньшей мере к одному первому корректировочному модулю (230) второго кориолисова гироскопа (200), и
- по меньшей мере один второй корректировочный модуль (140) первого кориолисова гироскопа (100) выполнен однотипно по отношению по меньшей мере к одному второму корректировочному модулю (240) второго кориолисова гироскопа (200).
13. Система по одному из пп. 9 или 10, отличающаяся тем, что
- по меньшей мере два кориолисовых гироскопа (100, 200) соединены друг с другом в отношении регистрации отклонения системы масс вследствие кориолисовой силы, которая действует вдоль второй оси, и
- по меньшей мере один из кориолисовых гироскопов (100, 200) включает в себя по меньшей мере один первый корректировочный модуль (130, 230), и по меньшей мере один из кориолисовых гироскопов (100, 200) включает в себя по меньшей мере один второй корректировочный модуль (140, 240).
14. Система по одному из пп. 9-10, включающая в себя, кроме того, по меньшей мере один управляющий модуль, который электрически соединен с корректировочными модулями (130, 140, 230, 240) и предназначен для подачи на них по меньшей мере в течение промежутка времени постоянного корректирующего напряжения.
15. Способ уменьшения квадратурного искажения кориолисова гироскопа (1) по п. 1, согласно которому на корректировочные модули (30, 40) подают по меньшей мере в течение промежутка времени постоянные корректирующие напряжения,
причем корректирующие напряжения выбирают в зависимости от подлежащего уменьшению квадратурного искажения,
отличающийся тем, что
величину корректирующих напряжений устанавливают в зависимости от определенного изменения собственной частоты системы масс вдоль второй оси.
16. Способ уменьшения квадратурного искажения кориолисова гироскопа (1) по п. 5, согласно которому
на корректировочные модули (30, 40) подают по меньшей мере в течение промежутка времени постоянные корректирующие напряжения,
причем корректирующие напряжения выбирают в зависимости от подлежащего уменьшению квадратурного искажения,
отличающийся тем, что
- корректирующие напряжения, которые подают на однотипно выполненные корректировочные модули (30, 40), в сумме компенсируются.
| US 6250156 B1 26.06.2001 | |||
| US 20070144255 A1 28.06.2007 | |||
| US 20030056589 A1 27.03.2003 | |||
| US 20050166675 A1 04.08.2005 | |||
| US 7313958 B2 01.01.2008 | |||
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2007 |
|
RU2347191C1 |

