Изобретение относится к области электропитания радиоэлектронного оборудования и может быть использовано для замены сенсорных элементов (СЭ) беспроводных сенсорных сетей (БСС), с целью их ремонта или подзарядки аккумуляторных батарей.
Техническое обслуживание и энергообеспечение элементов БСС представляют особые трудности для пространственно удаленных узлов сети.
Эти элементы обычно питаются от автономных источников электроэнергии, нуждающихся в периодической подзарядке [1, 2] Из уровня техники известен ряд способов решения данной проблемы. При отсутствии у персонала свободного доступа к элементам БСС, замена источников электропитания может осуществляться специализированными роботами [4, 5, 6]. В наиболее распространенных сенсорных узлах: таких как Mica, Telos, Iris и др. [4] основным источником электропитания является аккумуляторная батарея, нуждающаяся в периодической подзарядке. Перспективной технологией подзарядки аккумуляторных батарей, позволяющей значительно увеличить срок службы элементов БСС, в настоящее время является беспроводная передача электроэнергии [7] с использованием различного рода мобильных устройств [8]. Передача электроэнергии при этом осуществляется путем индукционного электромагнитного воздействия зарядного устройства на перезаряжаемые аккумуляторные батареи узлов БСС. Замена неисправных СЭ в труднодоступных местах обычно осуществляется с помощью вертолетов и стоит весьма дорого.
Наиболее близким по технической сущности является способ подзарядки аккумуляторных батарей в сенсорных сетях при помощи беспилотных летательных аппаратов (БПЛА) [3].
В рассматриваемой области применения у способа-прототипа имеются следующие недостатки:
- Подзарядка аккумуляторных батарей требует доставки значительного количества электроэнергии к месту расположения СЭ.
- Подзарядка с помощью облучения электромагнитными колебаниями требует установки на БПЛА преобразователя, генератора электромагнитных колебаний и излучающей антенны, а также источника дополнительной энергии, и имеет малый коэффициент полезного действия.
- Подключение источника доставляемой электроэнергии контактным способом имеет весьма малую надежность.
Основным недостатком является то, что указанный способ не учитывает последовательность и моменты времени начала обслуживания СЭ.
Предлагаемое решение проблемы состоит в том, чтобы, используя в качестве транспортного средства БПЛА, доставлять СЭ к месту расположения стационарного источника энергии, причем, порядок и время обслуживания определяются с помощью цифровой модели, непосредственно подключенной к сети, и получающей по сети информацию о состоянии аккумуляторных батарей СЭ.
Техническим результатом предлагаемого изобретения является недопущение полной разрядки аккумуляторных батарей, возможность их быстрой замены и оперативного ремонта СЭ.
Сущность предлагаемого способа состоит в том, что команда на обслуживание очередного СЭ поступает к БПЛА от цифровой модели, непосредственно подключенной к сети, и получающей по сети информацию о степени и скорости разрядки аккумуляторных батарей СЭ.
Известный способ-прототип осуществляется следующим образом.
Фиг.1 демонстрирует принцип реализации способа-прототипа подзарядки аккумуляторных батарей в БСС при помощи БПЛА. Управление осуществляется посредством пульта управления и размещенного на БПЛА приемопередатчика и видеокамеры (штатное оборудование БПЛА, на Фиг.1 не показаны).
На БПЛА-1 устанавливаются источник электромагнитной энергии ИЭ-2, снабженный излучателем. Посредством БПЛА-1, ИЭ-2 доставляется к месту расположения СЭ-3. СЭ-3 снабжен приемником электромагнитных колебаний и преобразователем их в ток подзарядки аккумулятора. В результате излучения электромагнитной энергии излучателем БПЛА-1 происходит подзарядка аккумулятора СЭ-3, после чего БПЛА-1 вместе с ИЭ-2 возвращается в исходную позицию, где производится его обслуживание и подготовка к новому полету.
Главным недостатком способа-прототипа является то, что он не определяет последовательность и периодичность обслуживания СЭ-3 с помощью БПЛА-1. Длительность процесса подзарядки аккумулятора может привести к полной разрядке аккумуляторов некоторых других СЭ-3.
С целью устранения указанного недостатка, в предполагаемом изобретении предлагается ввести цифровую модель, подключенную непосредственно к сети, и получающую по сети информацию о состоянии аккумуляторных батарей СЭ-3. Команда на начало обслуживания очередного СЭ-3 должна поступать к БПЛА по результатам цифрового моделирования. Применение цифровой модели позволит минимизировать время активной работы БПЛА-1, при получении уверенности, что ни один из аккумуляторов в сети не разрядится ниже заданного предела.
Предлагаемый способ осуществляется следующим образом.
На Фиг.2 представлен фрагмент БСС, где:
1 - БПЛА.
2 - Узловые элементы - УЭ.
3 - Сенсорные элементы - СЭ.
4 - Базовый узел - БУ.
5 - База обслуживания - БО.
6 - Цифровая модель сети - ЦМ.
Все СЭ-3 сети связаны радиоканалами через узловые элементы УЭ-2 с базовым узлом БУ-4. Базовый узел сети БУ-4, расположенный в Базе обслуживания БО-5 непосредственно связан с ЦМ-6 каналом связи. ЦМ-6 получает по сети информацию о состоянии СЭ-3, (например, о степени разряженности аккумуляторов). В модели ЦМ-6 имеется информация обо всех расстояниях до СЭ-3 и скорости полета БПЛА-1. В соответствии с выбранным алгоритмом обслуживания, используя получаемую из сети информацию о состоянии СЭ-3 модель определяет последовательность и моменты выдачи одному (или нескольким) БПЛА-1, команд на обслуживание очередного СЭ-3. БПЛА-1 совершает полет к очередному СЭ-3, и производит подзарядку его аккумуляторных батарей или доставку СЭ-3 на БО-5 для его замены (На Фиг.2 пунктиром показан маршрут полета БПЛА-1 и его возврата на базу).
Высокая скорость цифрового моделирования позволяет произвести оптимизацию последовательности обслуживания СЭ-3 с ее привязкой ко времени, обеспечивая минимизацию полетного времени и безусловное отсутствие полной разрядки аккумулятора любого из сенсорных элементов.
Предлагаемый способ основан на концепции использования «Цифровых двойников». «Цифровой двойник» - это цифровая копия физического объекта или процесса, помогающая оптимизировать эффективность бизнеса. Концепция «цифрового двойника» является частью четвертой промышленной революции, которая призвана помочь предприятиям быстрее обнаруживать физические проблемы, точнее предсказывать их результаты и производить более качественные продукты [9]. В качестве «Цифрового двойника здесь выступает показанная на Фиг.2 модель сети ЦМ-6.
Рассмотрим один из примеров алгоритма, реализующего предлагаемый способ. Имеется сеть сенсорных элементов СЭ с перезаряжаемыми аккумуляторными батареями. Аккумуляторы заменяются путем доставки и замены на стационарной станции сенсорных узлов c помощью БПЛА. Необходимо определить последовательность замены аккумуляторов, с тем, чтобы в процессе замены ни один из аккумуляторов не успевал полностью разрядиться, при этом, время, затраченное БПЛА в работе (коэффициент загрузки БПЛА) было бы минимальным.
На центральной базе всегда имеются готовые для замены СЭ, с заряженными аккумуляторами. На центральной базе имеется, поступающая по сети информация о степени зарядки аккумуляторов всех СЭ:
Z(I; T) - Уровень заряда аккумулятора СЭ (устройства I) в момент времени Т.
ZMAX(I) - Максимальный допустимый уровень заряда аккумулятора устройства I.
ZMIN(I) - Минимальный допустимый уровень заряда аккумулятора устройства I.
Т - время от начала полного цикла облета и зарядки всех СЭ БПЛА.
Известны координаты X(I), Y(I) – СЭ (устройств I), а также координаты центральной базы XB и YB. Следовательно, известны IL - расстояния от базы до сенсорного устройства I.
Z(I; 0)-Уровень заряда аккумулятора сенсорного устройства I в момент начала цикла Т=0.
Степень заряженности аккумулятора будем характеризовать временем, необходимым для его полной разрядки, начиная с момента Т:
 ,
,
где  - максимальная скорость разряда аккумулятора устройства I.
- максимальная скорость разряда аккумулятора устройства I.
Время, необходимое для прилета БПЛА от станции до сенсорного устройства I, определяется:
 ,
,
где L(D; I; T) – расстояние от БПЛА до сенсорного элемента I в момент времени Т, а  -скорость полета БПЛА.
-скорость полета БПЛА.
Время, необходимое для обслуживания БПЛА I-го сенсорного устройства TO(D; I).
Время полного полета (с возвратом) БПЛА и обслуживания сенсорного устройства I:
 .
.
Перед началом полетов производится моделирование всего полного цикла обслуживания.
1. Текущие значения Z(I; T) располагаются в порядке их возрастания и выбирается элемент с минимальным значением Z(I; T).
2. Моделируется полное время  полета и обслуживания указанного элемента, а его степень заряженности устанавливается максимальной ZMAX(I).
полета и обслуживания указанного элемента, а его степень заряженности устанавливается максимальной ZMAX(I).
3. Моделируется процесс разрядки аккумуляторов всех остальных СЭ в течение времени . Затем, происходит переход к пункту 1, и процесс повторяется до окончания моделирования подзарядки аккумуляторов всех СЭ.
После окончания цикла моделирования, выбирается СЭ с минимальным уровнем остаточного заряда и определяется остаточное время, в течение которого данный СЭ способен работать (все остальные элементы имеют большие остаточные времена). Если из времени прохождения полного цикла вычесть полученное остаточное время, то получим гарантированное допустимое время ожидания полета, с начала процесса моделирования. В течение указанного времени БПЛА может находиться на базе. Полученное время ожидания является гарантированным нижним пределом, поскольку при моделировании использовались максимально допустимые скорости разрядки аккумуляторов. Поэтому после окончания промежутка времени ожидания, в модель вновь поступают из сети все необходимые данные о состоянии СЭ и цикл моделирования повторяется. Так происходит итерационное повторение циклов моделирования, до тех пор, пока разность результатов, полученных между соседними циклами, достигнет установленного предела. После окончания моделирования становится известным номер СЭ, который требуется обслужить первоочередно, и такой элемент обслуживается БПЛА.
После окончания обслуживания указанного СЭ, процесс моделирования повторяется сначала и циклически обслуживаются все СЭ.
ЛИТЕРАТУРА
1. B. Scrosati, R.J. Neat. Lithium polymer batteries, in: Applications of Electroactive Polymers, Springer, 1993, pp. 182-222.
2. Nickel metal hydride battery- http://www.batteryspace.com/nimhpacks24-48v.aspx.
3. Лихтциндер Б.Я., Маслов О.Н. Способ подзарядки аккумуляторов в беспроводной сенсорной сети. Описание изобретения по Заявке №2019135170 от 01. 11. 2019.
4. Memsic wireless modules - http://www.memsic.com/products/wireless-sensor-networks/wireless-modules.html.
5. J. Sheu, P. Cheng, K. Hsieh, Design and implementation of a smart mobile robot, in: Wireless And Mobile Computing, Networking And Communications, 2005.(WiMob’2005), IEEE International Conference on, Vol. 3, IEEE, 2005, pp. 422-429.
6. A. LaMarca, W. Brunette, D. Koizumi, M. Lease, S. Sigurdsson, K. Sikorski, D. Fox, G. Borriello, Making sensor networks practical with robots, Pervasive Computing (2002) рр. 615-622.
7. R. Doost, K. Chowdhury, M. Di Felice, Routing and link layer protocol design for sensor networks with wireless energy transfer, in: GLOBECOM 2010, 2010 IEEE Global Telecommunications Conference, IEEE, 2010, pp. 1-5.
8. Powercast corporation, 2000 series 902 928 mhz powerharvester development kit. http://www.powercastco.com/products/development-kits.
9. https://ru.wikipedia.org/wiki/%D0%A6%D0%B8%D1%84%D1%80%D0%BE%D0%B2%D0%BE%D0%B9_%D0%B4%D0%B2%D0%BE%D0%B9%D0%BD%D0%B8%D0%BA.
Изобретение относится к области электропитания радиоэлектронного оборудования. Технический результат заключается в обеспечении возможности автоматического отслеживания последовательности и момента времени начала обслуживания сенсорного узла для недопущения полной разрядки аккумуляторных батарей. Такой результат достигается тем, что обслуживают сенсорные узлы беспроводных сенсорных сетей с помощью одного или нескольких беспилотных летательных аппаратов, содержащих устройства подъема и удержания сенсорного узла, пульт управления, приемопередатчик и видеокамеру, Способ предусматривает наличие цифровой модели, подключенной непосредственно радиоканалами через узловые элементы к базовому узлу сенсорной сети и получающей по сети информацию о состоянии сенсорных элементов и всех расстояниях до сенсорных элементов, а команда на обслуживание очередного сенсорного элемента, подзарядку аккумуляторных батарей или его доставку поступает беспилотному летательному аппарату по результатам цифрового моделирования указанной модели. 2 ил.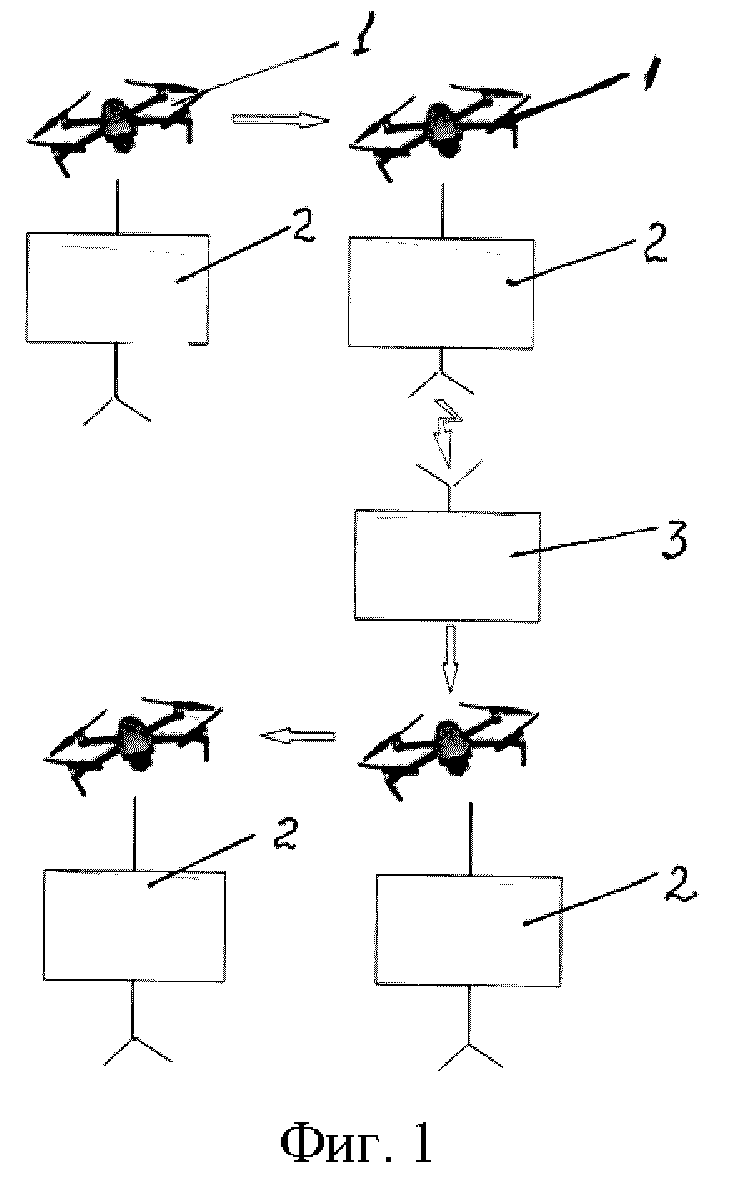
Способ обслуживания сенсорных узлов беспроводных сенсорных сетей с помощью одного или нескольких беспилотных летательных аппаратов, содержащих устройства подъема и удержания сенсорного узла, пульт управления, приемопередатчик и видеокамеру, отличающийся тем, что используется цифровая модель, в которой содержится информация обо всех расстояниях до сенсорных элементов и скорости полета БПЛА, цифровая модель содержится в базе обслуживания, которая в свою очередь содержит расположенный на ней базовый узел сети, что все сенсорные элементы СЭ сети связаны радиоканалами через узловые элементы УЭ с базовым узлом и информация о степени зарядки аккумуляторов всех сенсорных элементов поступает на базу обслуживания.
| Способ подзарядки аккумуляторов в беспроводной сенсорной сети | 2020 |
|
RU2730468C1 |
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| US 9387928 B1, 12.06.2016 | |||
| US 9534905 B1, 03.01.2017. | |||

