Область техники
В широком аспекте настоящее изобретение относится к области сельского хозяйства и к обработке убираемой сельскохозяйственной продукции.
Уровень техники
Для этого используются транспортные средства, в особенности самоходные уборочные сельхозмашины, которые служат для приема продукции урожая и обработки убранной массы. Под такими самоходными уборочными сельхозмашинами имеются в виду зерноуборочные комбайны, полевые измельчители и копатели всех видов, оснащенные устройствами для обработки и устройствами для транспортирования убранной массы. Таким устройством для транспортирования является, например, перегрузочное устройство, с помощью которого вся убранная масса передается на транспортное средство или в прицепной транспортный бункер. В процессе уборки уборочные машины непрерывно принимают убираемую массу, известным образом обрабатывают ее и разгружают на движущееся рядом или сзади транспортное средство, причем эта разгрузка производится либо непрерывно, как это имеет место, например, в полевом измельчителе, либо после промежуточного хранения, как это имеет место, например, в зерноуборочном комбайне. Разгрузка убранной массы производится перегрузочным устройством, которое в комбайне представляет собой передаточное устройство. Это передаточное устройство в комбайне может быть образовано разгрузочной трубой зернового бункера, а в полевом измельчителе - разгрузочной или выгрузной трубой, на конце которой имеется перегрузочный дефлектор. Передача убранной массы между самоходной уборочной сельхозмашиной и транспортным средством с помощью перегрузочного устройства осуществляется с минимальными возможными потерями. При этом перегрузочное устройство оснащено управляющим устройством для автоматической или ручной регулировки, а самоходная уборочная сельхозмашина оснащена навигационной системой для определения положений транспортных средств, участвующих в процессе.
Из уровня техники известно множество таких транспортных средств, в особенности самоходных уборочных сельхозмашин, оснащенных перегрузочным устройством для разгрузки убранной массы в транспортное средство или транспортный бункер, при этом они содержат также передаточное устройство, систему управления для регулировки передаточного устройства, перегрузочного дефлектора и выходной струи убранной массы, а также навигационную систему для определения относительных положений участвующих в процессе транспортных средств и обмена данными между транспортными средствами. При этом известны различные способы автоматической загрузки транспортных средств от полевого измельчителя путем автоматических перемещений разгрузочной трубы. Пример такого решения раскрыт в патентном документе ЕР 1454520. В нем описано управление для позиционирования передаточного устройства в соответствии с его степенями свободы, при котором высота выброса, то есть высота выпуска выпускного устройства, может выдерживаться независимо от поверхности земли и от поворота вокруг вертикальной оси. Недостаток в этом управлении заключается в том, что не учитывается, например, относительная скорость и положение транспортного средства, так что не может быть определена точка падения убранной массы на принимающее транспортное средств.
Для устранения этого недостатка в уровне техники описаны различные способы определения положения и параметров участвующих в процессе транспортных средств.
Такое устройство для определения положения и оценки параметров самоходных сельхозмашин раскрыто в патентном документе ФРГ №10064862 А1. Предмет изобретения относится к установленной на транспортных средствах навигационной системе, которая определяет относительное положение участвующих в процессе транспортных средств, между которыми должна перегружаться убранная масса, - например, между уборочной машиной и транспортным средством. Установленные данные используются для улучшенной координации транспортных средств относительно друг друга, а также для управления передаточным устройством. Другими словами, по данным текущего положения уборочного транспортного средства и транспортного средства рассчитывается установка передаточного устройства. Кроме того, по установленным данным размеров транспортного бункера и/или транспортного средства и текущей установки передаточного устройства вычисляется теоретическая точка падения убранной массы, подаваемой на транспортное средство. Если эта точка падения лежит за пределами транспортного бункера, создается предупредительное сообщение.
Для дальнейшего снижения до минимума потери убранной массы при перегрузке необходимо еще более точно определять точку падения убранной массы на транспортное средство и управлять ее положением.
Для этого в патентном документе ФРГ №102004052298 А1 предложена система управления передаточным устройством, которая устраняет необходимость постоянного контроля процесса перегрузки со стороны водителя и обеспечивает перегрузку убранной массы на транспортное средство с низкими потерями. Целью этой автоматизации является позиционирование непрерывного потока убранной массы в пределах предварительно заданной геометрии. Определенная геометрия представляет собой виртуальную сетку, которая охватывает частичную область или всю область уборочной машины и перекрывает также транспортное средство. Сетка состоит из множества ячеек или полей. С помощью управления выходной струей убранной массы водитель может направлять струю убранной массы на различные регулируемые поля виртуальной сетки. В целом перегрузка убранной массы ориентируется в соответствии с положением и величиной виртуальной сетки, а также с положением и величиной полей, так что область поворота передаточного устройства определяется виртуальной сеткой и виртуальными полями. При таком выполнении управления для перегрузочного устройства недостаток состоит в том, что водитель самоходной уборочной сельхозмашины должен далее производить управление перегрузочным устройством или выходной струей убранной массы и изменять положение точки падения убранной массы на транспортное средство таким образом, чтобы перегрузка выполнялась без потерь, а струя убранной массы не выходила за пределы транспортного средства и не падала на поле, образуя потери.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в устранении недостатков известных решений уровня техники и создании системы управления указанного выше типа, которая при перегрузке убранной массы оказывает помощью водителю и освобождает его от обязанности устранения потерь убранной массы из-за плохой координации перегрузки или при перегрузке в темное время суток.
В соответствии с изобретением решение поставленной задачи достигается за счет признаков, изложенных в пункте 1 формулы изобретения. Дальнейшие предпочтительные примеры осуществления и дополнительные решения по развитию изобретения изложены в зависимых пунктах.
Для обеспечения признаков по изобретению в транспортных средствах, в особенности в самоходных уборочных сельхозмашинах, оснащенных навигационной системой для определения относительных положений участвующих транспортных средств, системой передачи данных для обмена данными между транспортными средствами, перегрузочным устройством для разгрузки убранной массы на транспортное средство, причем перегрузочное устройство содержит передаточное устройство, систему управления для позиционирования передаточного устройства и перегрузочного дефлектора, предусмотрено, что разгрузка убранной массы на транспортное средство или в его транспортный бункер производится только в допустимой области.
Это означает, что желаемая точка падения струи убранной массы должна лежать в допустимой области. Допустимая область ограничена пограничной зоной, причем допустимая область и пограничная зона отображают, т.е представляют, площадь транспортного бункера. Эта площадь транспортного бункера образована контуром транспортного бункера, то есть размерами транспортного средства и/или транспортного бункера. При этом контур транспортного бункера образует внешнюю границу пограничной зоны. Внешняя граница пограничной зоны зависит от геометрии транспортного средства и/или транспортного бункера и поэтому выполнена с возможностью изменяемой настройки. Определение размеров и положения транспортного средства / транспортного бункера может осуществляться с помощью датчиков, например, посредством навигационной системы с антеннами GPS (Global Positioning System - глобальная система навигации и определения местоположения) на транспортном бункере и/или путем комбинации датчиков и математической модели.
В отличие от внешней границы внутренняя граница лежит внутри границы площади транспортного бункера и является частью грузовой площади, причем в специальном случае внутренняя граница пограничной зоны может частично или полностью совпадать с внешней границей пограничной зоны.
Это означает, что за счет изменяемой настройки внутренней границы пограничной зоны может регулироваться также величина допустимой области (для точки падения струи убранной массы. Настройка величины допустимой области осуществляется в зависимости от потребности или условий уборки. Потребность в настройке зависит также от различных параметров, таких как параметры машин и параметры убираемой массы, так что изменение настройки пограничной зоны или внутренней и/или внешней границы пограничной зоны может производиться в зависимости от этих параметров.
Таким образом, при изменении параметров убранной массы может осуществляться изменение настройки внутренней границы пограничной зоны. Параметром убранной массы может быть насыпной конус подаваемой убранной массы, размеры которого могут изменяться при различной влажности убранной массы. Сухая убранная масса образует небольшой насыпной конус, а влажная масса - большой. При изменении величины насыпного конуса должна быть изменена также настройка внутренней границы пограничной зоны, а следовательно, и величина допустимой области для точки падения струи убранной массы. На насыпной конус влияет также вид убранной массы и/или крупность ее измельчения.
Изменение параметров машин также может требовать изменения внутренней границы пограничной зоны. Параметрами машин могут быть, например, скорость движения уборочной машины и/или транспортного средства, а также скорости движения машин относительно друг друга. В ходе процесса перегрузки внутренняя граница пограничной зоны может изменяться в зависимости от этих параметров и адаптироваться к новым обстоятельствам. Другой параметр машин учитывает наклонное положение транспортного средства и/или уборочной машины, то есть либо уклон поля, либо наклон транспортного средства и/или уборочной машины относительно поверхности земли. Эти параметры также привлекаются для установления внутренней границы пограничной зоны при обработке данных для управления. При обработке данных для управления передаточным устройством могут привлекаться также параметры от датчиков, учитывающие условия внешней среды. Этими условиями могут быть, например, направление и скорость ветра.
Площадь, образованная между внутренней и внешней границами пограничной зоны, представляет запретную зону для точки падения струи убранной массы. Эта запретная зона образует для перегрузки убранной массы зону безопасности до фая транспортного бункера, причем в зависимости от потребности эта зона безопасности может быть увеличена или уменьшена. Теоретическая точка падения струи убранной массы на транспортное средство или в транспортный бункер определяется известным способом, описанным в патентных документах ФРГ №10064862 А1 и 102004052298 А1. Установленное положение точки падения определяет, может ли быть начат процесс перегрузки или нет.Если полученная теоретическим путем точка падения струи убранной массы лежит в области запретной зоны, процесс перегрузки не начинают. Если процесс перегрузки уже идет, его прерывают до тех пор, пока теоретическая точка падения не окажется вновь в пределах допустимой области загрузки. Если теоретическая точка падения струи убранной массы находится в пределах допустимой области загрузочной зоны, включают передаточное устройство и начинают процесс перегрузки. Другими словами, процесс перегрузки автоматически запускается и/или выполняется только при нахождении точки падения в допустимой области. В том случае, если точка падения струи убранной массы выходит за пределы допустимой области, процесс перегрузки автоматически выключается, а водитель уборочной машины или транспортного средства извещается об этом предупредительным сигналом. При этом водитель уборочной машины может продолжить процесс перегрузки путем ручного управления передаточным устройством.
Краткий перечень чертежей
Далее со ссылками на прилагаемый чертеж будет подробно описан пример процесса перегрузки в соответствии с изобретением.
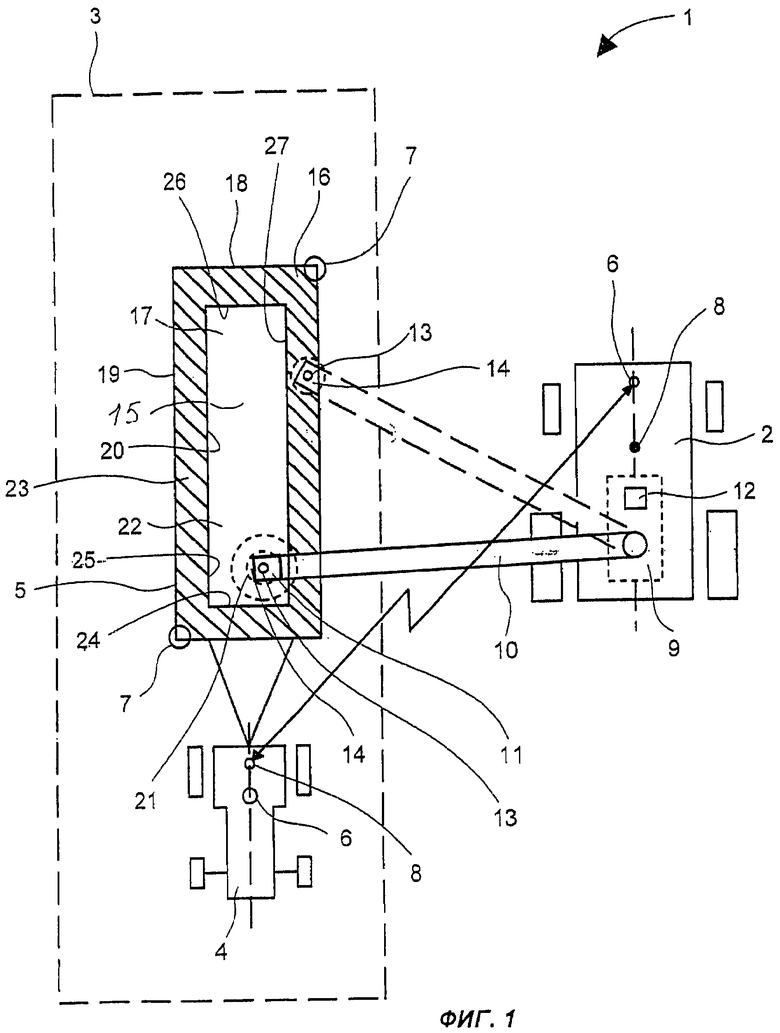
На фиг.1 схематично представлены транспортные средства, участвующие в процессе уборки и перегрузки, причем одно транспортное средство является уборочной машиной, а другое - транспортным средством для убранной массы с областью перегрузки в соответствии с изобретением.
Осуществление изобретения
На фиг.1 схематично представлены на виде сверху два транспортных средства 1, движущиеся параллельно рядом друг с другом. Одно транспортное средство представляет собой самоходную уборочную сельхозмашину 2 в виде зерноуборочного комбайна с известными элементами, например, устройством приема убранной массы, кабиной водителя, зерновым бункером, ходовым механизмом, опорными колесами и т.д., которые здесь подробно не описываются. Другое транспортное средство 3 состоит из тягача 4 и прицепного к нему транспортного бункера 5. Транспортное средство 4 может быть выполнено также в виде тягача 4 с встроенным транспортным бункером 5, то есть так называемого самоотвозного транспортного средства, например, в виде грузового автомобиля.
Самоходная уборочная сельхозмашина 2 может быть также, например, полевым измельчителем. Полевой измельчитель подбирает с обрабатываемого поля убранную массу с помощью подборщика, измельчает ее и разгружает с помощью перегрузочного устройства 9 на транспортное средство 3 или в транспортный бункер 5. Перегрузочное устройство содержит систему 12 управления, передаточное устройство 10 и перегрузочный дефлектор 11 для непрерывной разгрузки убранной массы.
Зерноуборочный комбайн 2 также принимает убранную массу с поля с помощью приемного аппарата, измельчает и сепарирует убранную массу, при этом фракция соломы выбрасывается, а зерновая фракция запасается в зерновом бункере. Комбайн также оснащен перегрузочным устройством 9, посредством которого производится опорожнение зернового бункера и перегрузка убранной массы на транспортное средство 3 или в транспортный бункер 5 с помощью передаточного устройства 10 и перегрузочного дефлектора 11. Перегрузка убранной массы или опорожнение зернового бункера может производиться непрерывно в ходе процесса уборки или периодически. Именно при непрерывной перегрузке необходимо освободить водителя от этих дополнительных посторонних нагрузок, чтобы он мог полностью сосредоточиться на процессе уборки.
В соответствии с изобретением такое освобождение базируется на том, что перегрузка убранной массы может производиться полностью автоматически. Для полной автоматизации перегрузки требуется определять текущие положения участвующих транспортных средств 1, то есть уборочной машины 2 и транспортного средства 3, с помощью навигационной системы 6. Для этого самоходная уборочная сельхозмашина 2 и транспортное средство 3, а также ее транспортный бункер 5 оснащены антеннами 7 системы GPS. Навигационная система 6 необходима для того, чтобы, с одной стороны, обеспечивать координацию между участвующими машинами 2, 3 и, с другой стороны, определять размеры транспортного средства 3 и/или транспортного бункера 5 и подавать эти данные в запоминающее устройство (не показано). Эти специальные данные необходимы для точного управления передаточным устройством с помощью системы 12 управления. Из комплекса установленных данных, которые включают в себя различные параметры машин и убранной массы, вычисляется теоретическая точка 13 падения струи 14 убранной массы в транспортный бункер 5, привлекаемая для управления передаточным устройством 10 и перегрузочным дефлектором 11. Для дальнейшего снижения потерь при перегрузке убранной массы в соответствии с изобретением предусмотрено для точки 13 падения струи 14 убранной массы определять допустимую область 15, которая лежит в пределах границ грузовой площади 17. Грузовая площадь 17 определяется контуром транспортного бункера 5. Для снижения потерь убранной массы необходимо, чтобы струя 14 убранной массы не подходила вплотную к контуру транспортного бункера 5, а удерживалась на определенном расстоянии от него. Однако это расстояние должно быть регулируемым на основе различных параметров машин и убранной массы. Для удержания точки 13 падения струи 14 убранной массы на определенном расстоянии от контура 18 транспортного бункера вокруг этого контура образована пограничная зона 16, которая представляет запретную зону 23 для точки 13 падения струи 14 убранной массы. Пограничная зона 16 образована с одной стороны внешней границей 19 и с другой стороны внутренней границей 20. Внешняя граница 19 определяется контуром 18 транспортного бункера, а внутренняя граница пограничной зоны 16 определяется допустимой областью 15 для теоретической загрузочной зоны 22. Загрузочная зона 22 и пограничная зона 16 образуют вместе грузовую площадь 17. Как уже было указано выше, внутренняя граница 20 пограничной зоны 16 может изменяться в процессе уборки или в процессе перегрузки с адаптацией к условиям уборки. В данном примере осуществления по фиг.1 внутренняя граница 20 пограничной зоны 16 образована четырьмя пограничными линиями 24, 25, 26, 27. При этом пары пограничных линий 24, 26 и 25, 27 проходят параллельно на расстоянии друг от друга и предварительно задаются контуром 18 транспортного бункера. При другой геометрии контура 18 транспортного бункера геометрические пограничные линии проходят по-другому. Изменение внутренней границы 20 пограничной зоны 16 может касаться всех пограничных линий 24, 25, 26, 27. Возможно также изменение каждой отдельной пограничной линии на основе параметров машины и убранной массы. Так, например, все четыре пограничные линии 24, 25, 26, 27 изменяются с изменением диаметра насыпного конуса 21 или две пограничные линии изменяются в соответствии с наклоном транспортного бункера 5, находящегося на поле в наклонном положении. В другом примере изменения внутренних пограничных линий 24, 26 могут производиться с учетом ветровых условий. Возможно также изменение одной из четырех пограничных линий. Изменения внутренних пограничных линий 24, 25, 26, 27 всегда влекут за собой изменение допустимой области 14 для точки 13 падения струи 14 убранной массы и тем самым теоретической загрузочной зоны 22.
Эта теоретическая загрузочная зона 22 управляется передаточным устройством 10, причем это передаточное устройство 10 в комбайне может представлять собой разгрузочную трубу зернового бункера, а в полевом измельчителе разгрузочную или выгрузную трубу. Перегрузка убранной массы от уборочной сельхозмашины 2 на транспортное средство 3 может осуществляться непрерывно или периодически. Между уборочной сельхозмашиной 2 и транспортным средством 3 имеется дополнительная связь, в виде системы 8 передачи. Система 8 передачи предоставляет линии передачи, по которым может производиться обмен данными для координации транспортных средств и управления передаточным устройством 10.
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в сельхозмашинах, обеспечивающих управляемую перегрузку убранной массы. Самоходная уборочная сельхозмашина оснащена навигационной системой для определения относительных положений участвующих в уборке транспортных средств, системой передачи данных для обмена данными между транспортными средствами и перегрузочным устройством для разгрузки убранной массы в транспортное средство. Перегрузочное устройство содержит передаточное устройство и систему управления для позиционирования передаточного устройства и перегрузочного дефлектора. Для передачи убранной массы на транспортное средство струю убранной массы направляют в транспортный бункер только в определенную допустимую область, ограниченную пограничной зоной, которая представляет собой запретную зону для перегрузки. Допустимая область и пограничная зона отображают площадь транспортного бункера. Уборочная сельхозмашина выполнена с возможностью регулирования величины допустимой области для точки падения струи убранной массы за счет изменяемой настройки внутренней границы пограничной зоны. Управляемое перегрузочное устройство обеспечивает снижение потерь при перегрузке убранной массы в транспортное средство. 19 з.п. ф-лы, 1 ил.
1. Самоходная уборочная сельхозмашина с управляемым перегрузочным устройством, оснащенная навигационной системой (6) для определения относительных положений участвующих транспортных средств (2, 3), системой (8) передачи данных для обмена данными между транспортными средствами (2, 3), перегрузочным устройством (9) для разгрузки убранной массы на транспортное средство (3), причем перегрузочное устройство (9) содержит передаточное устройство (10), систему (12) управления для позиционирования передаточного устройства (10) и перегрузочного дефлектора (11), отличающаяся тем, что точка (13) падения струи (14) убранной массы лежит в допустимой области (15), ограниченной пограничной зоной (16), причем допустимая область (15) и пограничная зона (16) отображают площадь (17) транспортного бункера (5), а сельхозмашина выполнена с возможностью регулирования величины допустимой области (15) для точки (13) падения струи (14) убранной массы за счет изменяемой настройки внутренней границы (20) пограничной зоны (16).
2. Самоходная уборочная сельхозмашина по п.1, отличающаяся тем, что площадь (17) транспортного бункера (5) образована контуром (18) транспортного бункера.
3. Самоходная уборочная сельхозмашина по п.2, отличающаяся тем, что контур (18) транспортного бункера образует внешнюю границу (19) пограничной зоны (16).
4. Самоходная уборочная сельхозмашина по п.3, отличающаяся тем, что внешняя граница (19) выполнена с возможностью изменения настройки.
5. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что внутренняя граница (20) пограничной зоны (16) лежит внутри контура (18) грузовой площади (17).
6. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что внутренняя граница (20) частично или полностью совпадает с внешней границей (19) пограничной зоны (16).
7. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что выполнена с возможностью изменения настройки пограничной зоны (16) при изменении параметров машин и убранной массы.
8. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что выполнена с возможностью изменения настройки внутренней границы (20) пограничной зоны (16) при изменении параметров убранной массы.
9. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что выполнена с возможностью изменения внутренней границы (20) пограничной зоны (16) при изменении насыпного конуса убранной массы.
10. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что выполнена с возможностью изменения внутренней границы (20) пограничной зоны (16) при изменении параметров машины.
11. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что выполнена с возможностью изменения внутренней границы (20) пограничной зоны (16) при изменении относительной скорости движения.
12. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что площадь, образованная между внутренней и внешней границами (19, 20) пограничной зоны (16), представляет запретную зону (23) для точки (13) падения струи (14) убранной массы.
13. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что установленное теоретически положение точки (13) падения является решающим фактором для начала процесса перегрузки.
14. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что процесс перегрузки не начинается, если точка (13) падения струи (14) убранной массы лежит в запретной зоне (23).
15. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что выполнена с возможностью начала процесса перегрузки, когда точка (13) падения струи (14) убранной массы лежит в допустимой области (15).
16. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что выполнена с возможностью прекращения процесса перегрузки, когда точка (13) падения струи (14) убранной массы выходит за пределы допустимой области (15).
17. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что внутренняя граница (20) пограничной зоны (16) образована пограничными линиями (24, 25, 26, 27).
18. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что передаточное устройство (10) в зерноуборочном комбайне образовано разгрузочной трубой зернового бункера.
19. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что передаточное устройство (10) в полевом измельчителе образовано выгрузной трубой.
20. Самоходная уборочная сельхозмашина по любому из пп.1-4, отличающаяся тем, что выполнена с возможностью осуществлять перегрузку убранной массы из уборочной машины (2) на транспортное средство (3) непрерывно или периодически.
| DE 102004052298 A1, 08.06.2006 | |||
| УСТРОЙСТВО ДЛЯ ОПТИМИЗАЦИИ ПЕРЕГРУЗКИ УБРАННОЙ МАССЫ НА СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2001 |
|
RU2282972C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНЫМ АППАРАТОМ | 1999 |
|
RU2245611C2 |
| Выгрузной трубопровод сельскохозяйственной уборочной машины | 1990 |
|
SU1752255A1 |
| Поточная линия для заделки концов штучных длинномерных изделий | 1984 |
|
SU1219159A1 |
| Лепестковый абразивный инструмент | 1986 |
|
SU1393613A1 |

