Изобретение относится к гидрографии, в частности к способам и техническим средствам барометрической съемки рельефа дна путем определения глубин на заданной акватории с определением их геодезических координат.
Известен способ съемки рельефа дна акватории эхолотом [1], включающий прохождение судном с установленным на нем эхолотом заданными галсами на акватории, излучение гидроакустических сигналов в сторону дна, прием отраженных от дна сигналов, измерение расстояний от приемоизлучающей антенны эхолота до отражающей поверхности (точек дна), определение географических координат судна, определение геодезических координат приемоизлучающей антенны эхолота, измерение параметров бортовой, килевой и вертикальной качки, истинного курса и скорости судна, определение истинных значений глубин и их геодезических координат с последующей их регистрацией и индикацией.
Известно также устройство для осуществления данного способа, представляющее собой эхолот [2], содержащий приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок управления, блок регистрации, обработки картирования рельефа дна, в котором выход приемоизлучающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизлучающего блока подключены к входу блока регистрации, обработки и картирования рельефа дна, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна.
Существенными недостатками известного способа и устройства являются сравнительно невысокая точность съемки рельефа дна акватории, не удовлетворяющая предъявляемым требованиям к гидрографической съемке (см., например: Правила гидрографической службы, №4 (ПГС, №4. - Съемка рельефа дна, часть 2. - Требования и методы), ГУНиО МО СССР, Л., 1984), а также существенная трудоемкость выполнения способа, что обусловлено необходимостью выполнения вычислений, связанных с определением поправок за отклонение действительной средней скорости звука в воде от используемых в вычислениях расчетных значений средней скорости звука в воде для конкретного эхолота, определяемой косвенным путем по измеренным значениям температуры, солености и плотности морской воды на принятых в практике стандартных горизонтах по глубине или путем непосредственного измерения скорости звука в равномерно распределенных точках по всей площади акватории.
Ввиду того, что требуемая достоверность определения средней скорости звука, выполняемая расчетным путем, обеспечивается только в малой локальной пространственной области, в которой измеряется температура, соленость и плотность морской воды или непосредственно скорость распространения звука в воде для конкретного эхолота, то точность съемки рельефа дна в конечном итоге отягощается погрешностью, обусловленной влиянием мелкомасштабной и крупномасштабной изменчивости во времени ветрового перемещения и турбулентности внутренних волн, подводных течений. Эта погрешность может достигать 3% от измеряемой глубины (см., например: D.E. Dinn, B.D. Loncarevic et al. The effect of so und velocity errors on multibeam sonar depth accuracy // Proccedings of American Hydrograhic Symposium. 1995, p.1001-1009).
В соответствии с требованиями стандарта Международной гидрографической организации (см., например: Записки по гидрографии. СПб., ГУНиО МО РФ, №248, 1999, с.27-32), на акваториях с глубинами свыше 200 м, на которых выполняется съемка в интересах безопасности судоходства, средняя квадратическая погрешность (СКП) определения глубины не должна превышать 0,3%.
При использовании известного способа съемки рельефа и устройства для его осуществления СКП определения глубины составляет для глубин до 100 м от 0,7 до 3,5 м, а для глубин до 200 м от 2,3 до 11,0 м соответственно, что не удовлетворяет предъявляемым требованиям.
При картировании рельефа дна СКП построения рельефа дна не должна превышать 0,5 мм в масштабе планшета, что в сочетании с погрешностью определения глубины известным способом и устройством для его осуществления в большинстве случаев не позволяет обеспечить и это требование.
Кроме того, при производстве съемки рельефа дна с последующим картированием рельефа дна, особенно в прибрежной зоне моря и в узкостях, необходимо иметь картографическую информацию как по суше, так и по прилегающей к ней акватории. Использование для этих целей типографских топографических и навигационных карт достаточно затруднительно. Одной из причин этого являются разные картографические проекции. Топографические карты строятся в проекции Гаусса-Крюгера, а навигационные в проекции Меркатора. Эта же причина является основным препятствием для использования растровых образов типографских карт в электронных геоинформационных системах, каковыми являются средства отображения картированной информации при выполнении съемки рельефа дна.
Известен также способ съемки рельефа дна акватории и устройство для его осуществления [3], в котором технический результат, заключающийся в повышении точности, решается за счет того, что в способе съемки рельефа дна акватории эхолотом, установленным на судне, включающем излучение гидроакустических сигналов в направлении дна, прием отраженных от поверхности дна сигналов, измерение расстояний от приемоизлучающей антенны до дна, определение координат судна по внешним источникам информации, измерение бортовой, килевой и вертикальной качки, истинного курса и скорости судна, привязку результатов измерений по времени, определение истинных значений глубин с определением поправки за отклонение действительной скорости звука в воде от расчетной, картирование полученной информации с определением геодезических координат измеренных глубин, в котором при определении истинных глубин поправку за отклонение действительной скорости звука в воде от расчетной определяют в соответствии с зависимостью: ΔZv=Н(Сср/Co-1), где Н - глубина под килем (Н=Σ Citi/2), Ccp=Vc4fиcosαΔfд - средняя скорость распространения звука в воде; Со - скорость распространения звука в воде, на которую рассчитан эхолот, fи - частота излучения гидроакустического сигнала гидроакустическим доплеровским лагом, Δfд - доплеровский сдвиг частоты между излученным и отраженным гидроакустическими сигналами гидроакустического лага от морского дна, α - угол, образованный направлением излучения гидроакустического сигнала до поверхности дна и горизонтом, Vc - скорость судна, определенная по геодезическим координатам, Ci - скорость распространения звука в воде при измерении глубин эхолотом, ti - промежуток времени между излучением сигнала и приемом эхо-сигнала от дна, при картировании рельефа дна выполняют сопряжение топографических и навигационных растровых карт.
При этом в устройство для осуществления способа, содержащее приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок управления и блок сбора, обработки информации и картирование рельефа дна акватории, в котором выход приемопередающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизмерительного блока подключены к входу блока сбора обработки информации и картирования рельефа дна акватории, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна, дополнительно введен блок определения средней скорости распространения звука в воде в направлении излучения гидроакустического сигнала, вход которого через блок управления соединен с выходом судового гидроакустического доплеровского измерителя скорости и выходом приемника радионавигационной или/и спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна акватории.
Данный способ в отличие от аналогов, благодаря тому, что при определении истинных глубин поправку за отклонение действительной скорости звука в воде от расчетной определяют с учетом средней скорости распространения звука в воде через значения доплеровского сдвига частоты между излученным и отраженным гидроакустическими сигналами гидроакустического лага от морского дна, позволяет достичь технического результата, заключающегося в повышении точности съемки рельефа дна акватории.
Однако ввиду того, что съемку осуществляют посредством измерительной аппаратуры, установленной на надводном судне, подверженном влиянию внешних условий, во время съемки присутствуют так называемые сбойные данные, которые при окончательной обработке измеренной информации бракуются. Наличие сбойных данных увеличивает время съемки, а соответственно и трудоемкость обработки.
Предусмотренный в аналогах и прототипе ввод поправок в зависимости от текущих значений рыскания, крена и дифферента носителя измерительной аппаратуры также в неполной мере устраняет погрешности измерения глубин акватории как из-за большой инерционности датчиков, так и из-за неравномерной потери энергии не только на пути от вибратора до дна и на самом дне (благодаря неполному отражению), но и на обратном пути.
Еще более сложные условия возникают при излучении отраженных сигналов от какого-либо препятствия, находящегося в водной среде. Здесь приходится считаться с влиянием телесных углов, внутри которых распространяется поток энергии акустических волн: телесного угла, внутри которого вибратор посылает сигналы, и телесного угла, под которым площадь препятствия видна из центра датчика волн (см., например: Шулейкин В.В. Краткий курс физики моря. Л., Гидрометеоиздат, 1959, с.400-401).
И если выполнение съемки известным способом обеспечивает необходимые требования для обеспечения судоходства, то при выполнении съемки в интересах поиска под слоем донного ила объектов и трубопроводов или определения параметров границ континентального шельфа требования по точности съемки не обеспечиваются.
Гидроакустический поиск в таких условиях сопровождается большим количеством ложных тревог.
При выполнении съемки на акватории континентального шельфа для выполнения требований по точности необходимо исключить или уменьшить влияние погрешностей, которые носят систематический или медленно меняющийся характер, к которым относятся погрешности, вызванные пространственно-временной изменчивостью поля скорости звука в районе съемки; погрешности, вызванные отклонением мгновенного уровня от наблюдаемого на уровневом посту; погрешности, связанные с определением положения и ориентации приборной системы координат в судовую систему координат.
При поиске подводных объектов и трубопроводов при малой толщине ила заиленным трубопроводом необходимо использование только высоконаправленных систем для получения высокого разрешения. При этом система должна быть низкочастотной для хорошего проникновения сигнала в толщу донных осадков. Проблема контроля трубопроводов и определения параметров границ континентального шельфа возникает, как правило, на мелководье, что требует ограниченных габаритов антенн. С учетом сравнительно небольших размеров заиленных объектов необходимо использовать сканирование узкого параметрического луча.
Задачей настоящего технического решения является повышение точности съемки рельефа дна.
Поставленная задача решается за счет того, что в способе съемки рельефа дна акватории, включающем излучение гидроакустических сигналов в направлении дна, прием отраженных от поверхности дна сигналов, измерение расстояний от приемоизлучающей антенны до дна, определение координат судна по внешним источникам информации, измерение бортовой, килевой и вертикальной качки, истинного курса и скорости судна, привязку результатов измерений по времени, определение истинных значений глубин с определением поправки за отклонение действительной скорости звука в воде от расчетной, картирование полученной информации с определением геодезических координат измеренных глубин, в котором при определении истинных глубин поправку за отклонение действительной скорости звука в воде от расчетной определяют в соответствии с зависимостью: ΔZv=Н(Сср/Co-1), где Н - глубина под килем (Н=ΣCiti/2), Ccp=Vc4fиcosαΔfд - средняя скорость распространения звука в воде, Со - скорость распространения звука в воде, на которую рассчитан эхолот, fи - частота излучения гидроакустического сигнала гидроакустическим доплеровским лагом, Δfд - доплеровский сдвиг частоты между излученным и отраженным гидроакустическими сигналами гидроакустического лага от морского дна, α - угол, образованный направлением излучения гидроакустического сигнала до поверхности дна и горизонтом, Vc - скорость судна, определенная по геодезическим координатам, Ci - скорость распространения звука в воде при измерении глубин эхолотом, ti - промежуток времени между излучением сигнала и приемом эхо-сигнала от дна, при картировании рельефа дна выполняют сопряжение топографических и навигационных растровых карт, в отличие от прототипа [3], дополнительно выполняют гидролокационное зондирование дна параметрическим гидролокатором со сканирующей характеристикой направленности, установленным на отличных горизонтах глубины от судовых гидроакустических средств с возможностью их перемещения как в вертикальной, так и в горизонтальной плоскостях методом секторного обзора со сканированием характеристики направленности в режиме излучения параметрической антенны с приемом отраженных сигналов антенной таких же размеров, как антенна накачки параметрической антенны, при этом ширина характеристики направленности в режиме приема превышает величину сектора обзора, а плоскость сканирования антенны отклонена относительно положения вертикальной локации на угол 15 градусов в сторону движения судна, а в устройство для осуществления способа, содержащее приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок управления и блок сбора, обработки информации и картирования рельефа дна акватории, в котором выход приемопередающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизмерительного блока подключены к входу блока сбора и обработки информации и картирования рельефа дна акватории, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна, блок определения средней скорости распространения звука в воде в направлении излучения гидроакустического сигнала, вход которого через блок управления соединен с выходом судового гидроакустического доплеровского измерителя скорости и выходом приемника радионавигационной или/и спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна акватории, дополнительно введены параметрический гидролокатор со сканирующей характеристикой направленности, сочлененный с судном кабель-тросом и соединенный своими входами-выходами блока управления и входом блока сбора, обработки информации и картирования рельефа дна акватории, модуль визуализации области рельефа, соединенный своим входом с выходом блока сбора, обработки и картирования рельефа дна акватории.
Сущность изобретения поясняется чертежами (фиг.1-6).
Фиг.1 - структурная блок-схема устройства. Устройство состоит из приемоизлучающей антенны 1, передающего блока 2, приемоизмерительного блока 3, блока управления 4, блока определения средней скорости распространения звука в воде 5, блока сбора, обработки информации и картирования рельефа дна 6, параметрического гидролокатора 7 со сканирующей характеристикой направленности, кабель-тросса 8, модуля визуализации области рельефа 9.
Выход приемопередающей антенны 1 подключен к входу приемоизмерительного блока 3, выход передающего блока 2 соединен с приемоизлучающей антенной 1, выходы приемоизмерительного блока 3 подключены к входу блока сбора, обработки информации и картирования рельефа дна акватории 6, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления 4 соединен с передающим блоком 2, приемоизмерительным блоком 3 и блоком сбора информации, обработки и картирования рельефа дна 6, в который дополнительно введен блок определения средней скорости распространения звука в воде 5 в направлении излучения гидроакустического сигнала, вход которого через блок управления 4 соединен с выходом судового гидроакустического доплеровского измерителя скорости и выходом приемника радионавигационной или/и спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна 6 акватории, параметрический гидролокатор 7 со сканирующей характеристикой направленности, сочлененный с судном кабель-тросом 8 и соединенный своими входами-выходами блока управления 4 и входом блока сбора, обработки информации и картирования рельефа дна акватории 6, модуль визуализации области рельефа 9, соединенный своим входом с выходом блока сбора, обработки и картирования рельефа дна акватории 9.
Устройство и принцип действия блоков 1÷6 аналогичны устройствам и принципу действия блоков 1÷6 прототипа [3]. При этом, как и в прототипе, приемоизлучающая антенна 1 собрана из пьезокерамических акустических преобразователей, размещенных в одном корпусе, которые используются как для излучения, так и приема отраженных от дна сигналов. В цикле излучения эти преобразователи соединены параллельно, а во время приема эхо-сигналов они работают независимо друг от друга.
Передающий блок 2 состоит из кварцевого генератора стабилизированного по частоте, формирователя периода следования излучаемых импульсов, устройства формирования длительности излучаемого импульса, синхронизатора, устройства квантования, усилителя мощности, преобразователя, коммутатора.
Генератор вырабатывает непрерывные колебания частотой 4,8 МГц, которая посредством синхронизатора снижается до 600 кГц, и формируется импульс излучения. Усилитель мощности усиливает импульс до величины, необходимой для возбуждения электроакустических преобразователей приемоизлучающей антенны 1. Посредством коммутатора преобразователи приемоизлучающей антенны 1 во время излучения подключаются к передающему блоку 2, а во время приема к приемоизмерительному блоку 3.
Приемоизмерительный блок 3 состоит из блока полосовых усилителей, антенного усилителя, основного усилителя, блока формирователей кодов управления, блока фильтров, амплитудного детектора, фильтра нижних частот, коммутатора, выходного усилителя и предназначен для приема, усиления и частотной селекции принятых сигналов.
Блок управления 4 состоит из ПЗУ микрокоманд, ПЗУ управления выбором адреса, БИС микропрограммного управления, двух микропроцессоров, ПЗУ, ОЗУ, схемы формирования переносов, трех буферных регистров и пяти магистралей: магистрали адреса, магистрали микрокоманд, магистрали D, магистрали М, магистрали L, и предназначен для выработки и трансляции команд и информационных файлов с принимаемой от внешних источников информации, а также информации, находящейся в ПЗУ.
Блок определения средней скорости распространения звука в воде 5 состоит из дешифратора микрокоманд, буферных каскадов, регистра адреса, арифметико-логического устройства, мультиплексоров, дешифратора, магистрали А, магистрали D, аккумулятора.
Блок сбора, обработки информации и картирования рельефа дна 6 состоит из приемных регистров, блока системной магистрали, усилителя, диспетчера памяти, операционного блока, блока управления потоком команд, блока микропрограммного управления, блока прерываний, выходных регистров.
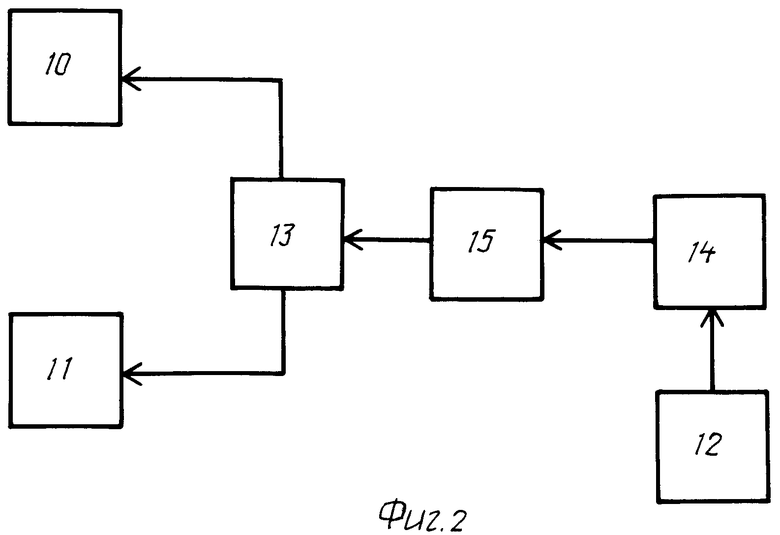
Фиг.2 - блок-схема параметрического гидролокатора 7 со сканирующей характеристикой направленности, включающего параметрические излучающие антенны 10 и 11, приемную антенну 12, сорокавосьмиканальную антенну накачки 13, формирователь 14 сигналов накачки с диаграммоформирующим устройством, усилитель мощности 15 на сорок восемь каналов.
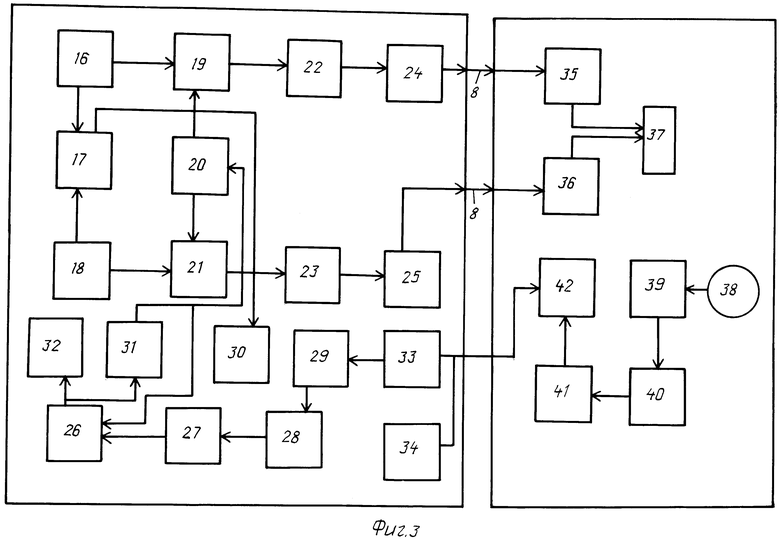
Фиг.3 - структурная схема параметрического гидролокатора. В состав параметрического гидролокатора 7 со сканирующей характеристикой направленности входит судовой комплекс СК, кабель-трос 8 и буксируемое устройство (БУ). Судовой комплекс включает в себя формирователь сигналов 16-23, двухканальный усилитель мощности 24 и 25, приемник эхо-сигналов 26-29, частотомер 30, регистратор сигналов 31, осциллограф 32, полосовой фильтр 33, блок питания 34. Формирователь сигналов состоит из двух задающих генераторов 16 и 18, схемы выделения разностной частоты 17, импульсных модуляторов 19 и 21, импульсного генератора 20, предварительных усилителей 22 и 23. В состав приемника эхо-сигналов входит схема запирания входа приемника на время посылки 29, усилитель с регулируемым коэффициентом усиления 28, набор фильтров нижних и верхних частот 27 и схема фазовой автоподстройки частоты 26.
Кабель-трос 8 имеет двойную грузонесущую оплетку, три изолированных токопроводящих жилы.
В состав буксируемого устройства (БУ) помимо буксируемого тела входят размещенные внутри буксируемого тела узлы согласования кабель-троса с преобразователями накачки 35 и 36, преобразователи накачки 37, приемные антенны 38, схема амплитудного ограничения принимаемого сигнала 39, предварительный усилитель 40, полосовой фильтр 41 и согласующий усилитель 42.
В параметрическом гидролокаторе 7 реализована двухканальная схема формирования сигнала накачки. Работа параметрического гидролокатора 7 состоит в том, что с задающих генераторов 16 и 18 сигнал поступает на импульсные модуляторы 19 и 21, где формируется сигнал с требуемой скважностью, после чего он усиливается по напряжению в предварительных усилителях 22 и 23. Запуск импульсного генератора при работе с регистратором эхо-сигналов осуществляется от регистратора сигналов 31. Для работы в измерительном режиме предусмотрен запуск от внутреннего импульсного автогенератора с регулируемой частотой посылок. После предварительных усилителей сигнал поступает на усилители мощности 24 и 25, которые снабжены узлами согласования с кабель-тросом 8. С выходов усилителей мощности 24 и 25, пройдя кабель-трос 8, сигнал поступает на узлы согласования 35 и 36, размещенные в буксируемом теле, а затем подводится к одному из преобразователей накачки 37.
На время излучения к схеме запирания входа приемника 29 подводится управляющий импульс от импульсного генератора 20, что исключает возможность перегрузки приемного тракта в момент посылки. Отраженный от подводного объекта сигнал принимается одной из широкополосных антенн 38, проходит через схему ограничения сильных эхо-сигналов 39, усиливается предварительным усилителем 40. Усиленный сигнал поступает на полосовой фильтр 41 с полосой пропускания 2,5-50 кГц, благодаря которому ослабляются поступающие на приемный тракт сигналы с частотами накачки, низкочастотные помехи обтекания от движения буксируемого тела, шумы судна-носителя. Далее сигнал проходит на согласующий усилитель 42, который выполняет задачу согласования выходного сопротивления схемы с волновым сопротивлением кабель-троса 8. Здесь же осуществляется разделение переменных сигналов с напряжением питания предварительного усилителя, которые передаются по одной проводящей жиле кабель-троса 8. После кабель-троса 8 сигнал проходит на вход дополнительного полосового фильтра 33, исключающего попадания высокочастотных наводок с выходов усилителей мощности 24 и 25 через кабель-трос 8 на ввод приемника 26-29. Здесь же осуществляется разделение напряжения питания, идущего от блока питания 34 на буксируемое устройство, и эхо-сигналов, усиленных предварительным усилителем 40. После дополнительной фильтрации принятые эхо-сигналы поступают на приемник, где усиливаются в регулируемом усилителе 28, фильтруются в фильтре нижних и верхних частот 27, поступают на схему фазовой подстройки частоты (ФАПЧ), где преобразуются в сигналы с частотой, необходимой для работы перьевого регистратора 31. Для нормальной работы схемы ФАПЧ к блоку 26 подводится сигнал схемы выделения разностной частоты 17. Помимо регистрации принимаемых сигналов осуществляется и визуальный контроль сигналов.
В комплекте гидроакустической буксируемой системы четыре антенны накачки, три из них имеют размеры 100×200 мм, а четвертая 700×28 мм. При этом площадь активной поверхности излучения всех четырех антенн равна 200 см2. Это позволяет подключать любую антенну к усилителю мощности без дополнительного согласования. Конструктивно каждая антенна выполнена в виде 14 мозаичных модулей, каждый из которых содержит 28 элементов с резонансными частотами 150 и 180 кГц.
В качестве приемных антенн использованы широкополосные высокочувствительные цилиндрические преобразователи с тангенциальной поляризацией и поршневые резонансные антенны.
Параметрические антенны гидролокатора 7 излучают в диапазоне частот от 5 до 50 кГц. Средняя частота накачки 165 кГц. Ширина характеристики направленности по уровню - 3 дБ составляет 3×6 градусов для антенн, излучающих в вертикальном и горизонтальном направлениях, и 1×20 градусов для антенн бокового обзора. Уровень звукового давления, приведенный к расстоянию 1 м, на частоте 20 кГц составляет 2000 Па.
Наличие параметрического режима работы позволяет при сравнительно малых размерах буксируемого тела иметь в одном устройстве практически четыре высоконаправленных гидролокатора.
Размещение четырех антенн позволяет производить лоцинирование в горизонтальной и вертикальной плоскостях, а также дает возможность с помощью наклоненной под углом 20 градусов антенны получить панорамное изображение рельефа дна.
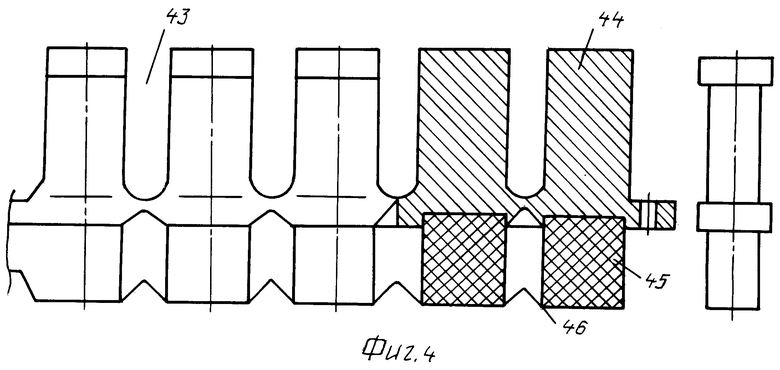
Фиг.4 - общий вид модуля преобразователей многоканальной антенны накачки. Модули выполнены в виде двусторонних гребенчатых структур 43 с пьезоэлементами 44 из пьезокерамики типа ЦТСНВ-1 диаметром 7 мм, высотой 9 мм и развитой накладкой 45 из сплава Д16 на общем фланце в узловой плоскости и соединены монтажным проводом 46.
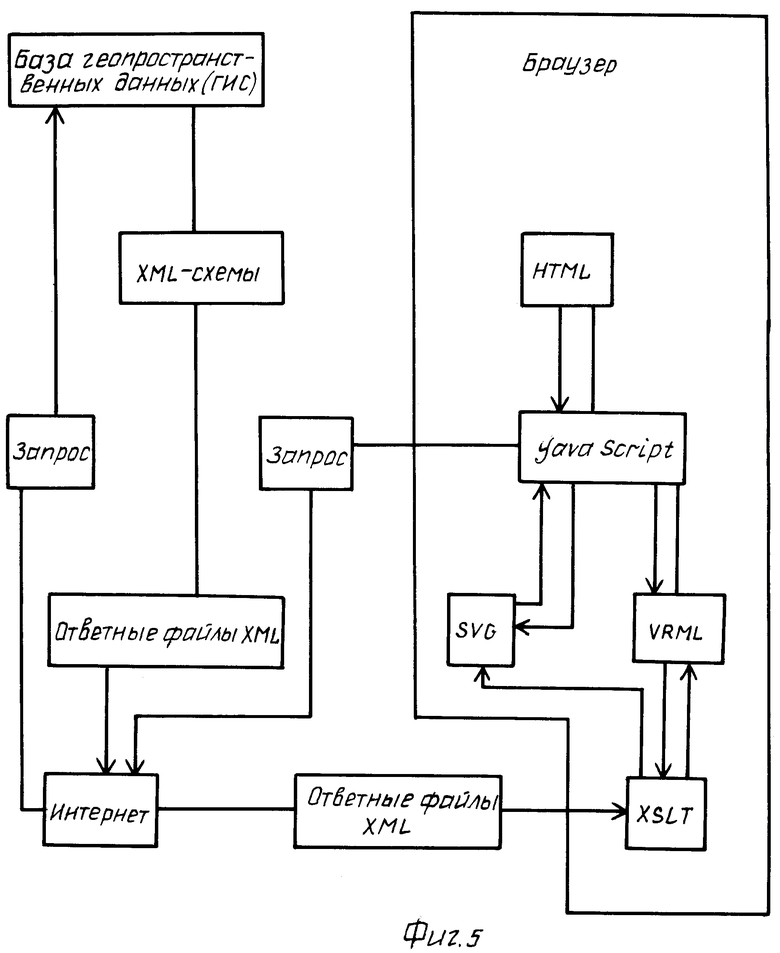
Фиг.5 - блок-схема модуля визуализации области рельефа.
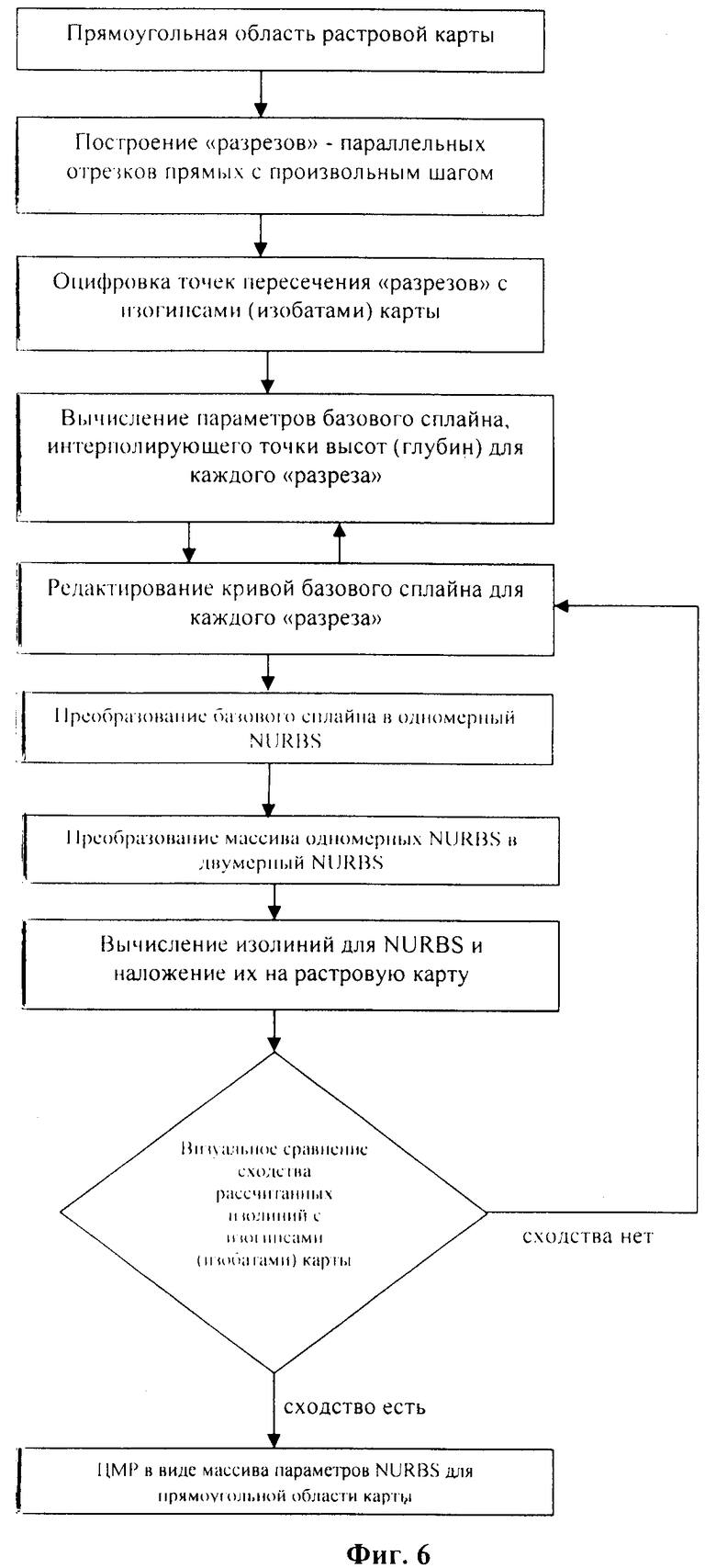
Фиг.6 - алгоритм обработки картографической информации.
Работа устройства заключается в следующем.
По командным импульсам, вырабатываемым блоком управления, в передающем блоке 2 осуществляется формирование акустического импульса и излучение его приемоизлучающей антенной 1 в сторону дна, а также прием и преобразование в электрический сигнал отраженных дном акустических сигналов, трансляция этих сигналов на вход приемоизмерительного блока 3, в котором вырабатываются электрические сигналы, пропорциональные временным задержкам прихода отраженных от поверхности дна сигналов, по которым определяются расстояния от приемоизлучающей антенны 1 до точек отражения сигналов от морского дна.
Одновременно по командным импульсам с блока управления 4 электрические сигналы, пропорциональные доплеровскому сдвигу частоты опорного гидроакустического сигнала от судового гидроакустического доплеровского измерителя скорости (лага) - аналогом которого является лаг, описанный в кн.: Абсолютные и относительные лаги / Виноградов К.А., Кошкарев В.И., Осюхин Б.А., Хребтов А.А. // Судостроение, Л., 1990, с.30, и электрические сигналы, пропорциональные геодезическим координатам x, y от судового приемоиндикатора спутниковой или радионавигационной системы, поступают на вход блока определения средней скорости распространения звука в воде 5, в котором средняя скорость распространения звука в воде Сср определяется в соответствии с зависимостью: Ccp=Vc4fиcosα/Δfд, где Vc - скорость судна, определенная по геодезическим координатам спутниковой или радионавигационной системы, fи - частота излучения гидроакустического сигнала гидроакустическим доплеровским лагом, Δtд - доплеровский сдвиг частоты между излученным и отраженным гидроакустическими сигналами гидроакустического доплеровского лага от морского дна, α - угол, образованный направлением излучения гидроакустического сигнала до поверхности дна и горизонтом. Данная зависимость следует из того, что для конкретного четырехлучевого гидроакустического доплеровского лага типа ЛА-52, являющегося штатным измерителем скорости на гидрографических судах, скорость судна определяется в соответствии с зависимостью: Vc=Vcp/4fиcosα·Δfд.
Одновременно с определением скорости по лагу определяют скорость судна по геодезическим координатам, полученным по спутниковой или радионавигационной навигационным системам в соответствии с зависимостью:  , где Xi, Yi - геодезические координаты судна, ti - время их определения.
, где Xi, Yi - геодезические координаты судна, ti - время их определения.
Далее по командным импульсам с блока управления 4 информация с блоков 3, 4 и 5 поступает на блок сбора, обработки информации и картирования рельефа дна 6, на который также поступает информации от судовых измерителей составляющих качки и курса.
В блоке 6 определяется поправка ΔZv к глубинам, измеренным эхолотом (H=ΣCiti/2, где Ci - скорость распространения звука в воде, ti - промежуток времени между излучением сигнала приемом эхо-сигнала от дна), за отклонение действительной скорости звука в воде от расчетной для конкретного эхолота: ΔZv=Ci(Ccp/Со-1), где Сi - глубина, измеренная эхолотом, Со - скорость распространения звука в воде, на которую рассчитан эхолот.
Информация с параметрического локатора 7 поступает на модуль визуализации области рельефа 9.
Картирование информации осуществляется нанесением геодезических координат точек отражения гидроакустических сигналов от морского дна на планшет, который строится путем сопряжения топографических и навигационных растровых карт в следующей последовательности:
- растр навигационной карты в проекции Меркатора подвергается векторизации береговой линии навигационной карты;
- выполняется выборка участка, соответствующего морской акватории, на которой производится съемка рельефа дна с учетом векторизации береговой линии навигационной карты;
- производится запись в итоговый растр навигационной карты;
- растр топографической карты в проекции Гаусса-Крюгера приводится к масштабу навигационной карты;
- выполняется преобразование координат проекции Гаусса-Крюгера в географические координаты;
- выполняется преобразование географических координат в координаты проекции Меркатора;
- производится выборка участка растра, соответствующего сухопутной (береговой) области;
- выполняется запись в итоговый растр топографической карты;
- по результатам записей в итоговые растры навигационной и топографической карты строится итоговая растровая карта совмещенной навигационной и топографической информации в Меркаторской проекции;
- на итоговой растровой карте, выводимой на устройство индикации, также отображается путь судна.
Принцип работы гидролокатора 7 состоит в следующем.
В качестве метода обзора применен секторный обзор со сканированием характеристики направленности в режиме излучения параметрической антенны. Прием осуществляется антенной таких же размеров, как антенна накачки параметрической антенны. При этом ширина характеристики направленности в режиме приема превышает величину сектора обзора. Для уменьшения интенсивности донной реверберации и снижения влияния кратных эхо-сигналов от поверхности при работе в мелком море плоскость сканирования антенны отклонена относительно положения вертикальной локации на угол около 15 градусов в сторону движения судна. Сектор сканирования луча параметрической антенны ограничен углом падения, зависящим от угла полного внутреннего отражения звукового луча в донных осадках, который изменяется от 30 до 50 градусов в зависимости от типа и состояния донных осадков. Шаг сканирования, зависящий от требуемой угловой разрешающей способности и максимальной скорости поиска, составляет 3 градуса по каждому борту.
Разрешающая способность по угловой координате определяется шириной характеристики направленности и параметрической антенны, которая составляет 3×4 градуса на уровне - 3 дБ. Разрешающая способность по дальности при максимальной скорости съемки (поиска) составляет 0,5-1,5 м для различных сочетаний параметров обзора.
Обзор осуществляется по правому и левому бортам двумя параметрическими антеннами 61 и 62, характеристики направленности которых при синфазном включении элементов антенны накачки 64 наклонены вперед на 15 градусов и наклонены левая антенна влево, а правая антенна вправо на одну четвертую величины сектора сканирования. Приемная антенна 63 ориентирована вниз и также наклонена вперед на 15 градусов.
В устройстве используется два режима сканирования. При внутриимпульсном сканировании в каждом направлении излучается ортогональный сигнал со своей частотой, т.е. линейно-частотно-модулированный (ЛЧМ) сигнал излучается одновременно со сканированием характеристики направленности в течение длительности зондирующего импульса. В приеме в этом случае используется многоканальная обработка. В случае межпериодного сканирования в каждом направлении излучается либо тональный радиоимпульс, либо ЛЧМ сигнал. В последнем случае в приемном тракте используется обработка на базе фильтра, согласованного с зондирующим сигналом.
В состав параметрического излучающего тракта гидролокатора 7 входят: формирователь 65 сигналов накачки с диаграммоформирующим устройством, усилитель мощности 66 на сорок восемь каналов, антенна накачки 63, представляющая собой сорокавосьмиканальную двухрезонансную антенну.
Сигнал накачки в виде сорока восьми частотно-модулированных компонент с эквидистантным поканальным фазовым сдвигом, регулируемым соответственно режиму сканирования, поступает на многоканальный усилитель мощности 66, затем усиленный сигнал подается на двухрезонансную антенную решетку, которая излучает сигнал накачки в заданных направлениях. В результате нелинейного взаимодействия акустических волн накачки в среде генерируется сигнал разностной частоты с заданными параметрами, причем пространственные характеристики параметрической антенны определяются управляемыми пространственными характеристиками поля волн накачки.
Одной параметрической антенной обеспечивается сектор сканирования ±15 градусов в диапазоне разностных частот от 4 до 20 кГц. Девиация частоты задается программой. Предусмотрены следующие режимы сканирования: ручной, непрерывный внутриимпульсный, дискретный внутриимпульсный, посылочный.
Формирователь 65 сигналов накачки с диаграммоформирующим устройством содержит синтезатор компонент сигналов накачки, генерирующий колебания с частотами f1=fм-ðφ(τ)/ðτ и f2=fв-ðφ(τ)/ðτ.
Закон изменения фазы φ(τ) формируется задающим генератором модулирующих функций. С выхода синтезатора бинарные сигналы с частотами f1 и f2 поступают на вход блока управляемых линий задержки, режим работы которых задается блоком управления сканированием. На выходах формирователя 65 формируются сигналы (24 канала с частотой f1 и 24 канала с частотой f2) с последовательно нарастающим от канала к каналу сдвигом фаз, определенным законом изменения огибающей и регулируемым длительностью импульса и периодом следования. Длительность импульса регулируется в пределах от 0,5 до 32 мс. В ручном режиме предусмотрено 32 дискретных угла сканирования.
Усилитель мощности 66 состоит из двух блоков. В каждом блоке содержится 24 канала. Амплитуда входных сигналов составляет 10 В, выходных сигналов 600 В.
Многоканальная антенна накачки 64 предназначена для преобразования энергии электрических сигналов в акустические и формирования узкой характеристики направленности на частотах накачки. Антенна состоит из двух подрешеток с резонансными частотами 65 и 75 кГц. В каждой подрешетке содержится 24 модуля (фиг.10). В модуле имеется тридцать один преобразователь, которые обеспечивают характеристику направленности шириной 4 градуса на уровне - 3 дБ. Отдельные преобразователи в модуле могут подгоняться по частоте для повышения общей эффективности антенны. Модули в антенне расположены в порядке чередования типов с разными резонансными частотами. Конструктивно антенна выполнена в прямоугольном сварном корпусе размером 520×330×80 мм. Излучающая поверхность после сборки залита звукопрозрачным полиуретановым компаундом, который предохраняет накладки от разрушения в морской воде.
Результаты измерений амплитудно-частотных характеристик и характеристик направленности параметрического излучающего тракта в двух плоскостях со сканированием луча в пределах заданных углов на разностной частоте 20 кГц показали возможность обнаружения и контроля трубопроводов, закрытых слоев ила, что подтверждено эхограммой, полученной в результате локации участка трубы под углом 15 градусов к вертикали со сканированием характеристики направленности в перпендикулярной плоскости. При этом труба находилась на дне под тонким слоем ила толщиной не более 20 см. Дно представляло собой слоистую структуру. Эхограмма получена на частоте 12 кГц при длительности зондирующего импульса 0,5 мс. За счет сканирования характеристики направленности эхо-сигналы от трубы появляются в определенном секторе углов.
При визуализации зарегистрированной области рельефа дна данные для VRML интерпретатора (фиг.5) формируются в оперативной памяти компьютера вычислительного устройства с последующей загрузкой в интерпретатор. Для чего в загрузочный VRML файл включен узел JavaScript, функции которого контролируют область видимого пространства. Программными инструментами для картографической визуализации служат структуры данных в формате SVG, который поддерживает векторные и растровые данные. Отображение в браузере данных в формате SVG осуществляется интерпретатором декларативного языка SVG. Данные в структуре SVG формируются аналогично формированию данных в формате VRML. На основе данных в структуре XML (геопространственная информация), получаемых от базы данных по запросу, проводится конвертация в памяти браузера в структуру SVG с помощью XSLT-T. Для одновременного представления геопространственных данных в двумерном и трехмерном представлении осуществляется поддержка синхронизации навигации по той и другой сцене. На картографической сцене отображается прямоугольник, соответствующий текущей области пространства, данные о которой загружены в память интерпретатора VRML. Синхронизация со стороны SVG осуществляется на основе функций JavaScript, встроенных в SVG и HTML. Так как синхронизацию со стороны VRML осуществить сложнее, то в загрузочный файл VRML включен узел JavaScript с навигационными функциями, не позволяющими трехмерному изображению выходить за рамки окна зрения и постоянно отслеживающими координаты окна зрения. Эти координаты служат необходимой информацией для синхронизации с картографической сценой, которая возможна с использованием таймера HTML.
Система навигации построена с использованием альтернативного по отношению к известной технологии GA принципа организации точки наблюдения трехмерной сцены, в которой используется стандартный принцип - точка наблюдения расположена вне сцены и при навигации сцена неподвижна, а изменяются координаты точки наблюдения и угол наблюдения. При этом центр вращения явно не определяется, что и является одной из причин потери изображения при навигации. В предлагаемой технологии точка наблюдения находится постоянно в центре окна наблюдения и визуализируется небольшим трехгранником осей, а начало трехгранника всегда является центром вращения изображения и при навигации сцена перемещается относительно этого центра.
Информация с блока 6 (фиг.1) поступает на модуль визуализации области рельефа 9 (фиг.5), посредством которого выполняют интерполяцию точек высот (глубин) методами двумерных сплайн-функций, а конкретно в виде двумерных нерегулярных рациональных фундаментальных сплайнов (NURBS) (Голованов Н.Н. Геометрическое моделирование. М., Физатлит, 2002. - 472 с.), математические выражения которых не приводятся по причине отсутствия достаточного места. Преимуществом предлагаемого способа является выполнение интерполяции точек высот в виде двумерных рациональных двумерных сплайн-функций NURBS, что позволяет построить гладкую поверхность для любой формы рельефа, даже для обрывов с отрицательным углом наклона. Во-вторых, поверхность рельефа задается аналитической зависимостью, т.е. конечным набором параметров фиксированного набора функций (полиномиальных сплайнов). Аналитическая форма задания рельефа, т.е. в виде суперпозиции аналитических функций от двух переменных, позволяет использовать весь аппарат дифференциальной геометрии для описания морфометрических свойств рельефа, например, вычисления значения функции (высоту, глубину) или ее дифференциала (уклон) в любой точке (точках) области задания функции. В-третьих, NURBS обеспечивают возможность локального редактирования формы поверхности. Кроме того, для одной и той же области земли объем массива данных ЦМР при использовании NUBRS будет как минимум на порядок меньше, чем при традиционном точечном представлении. Следовательно, применение NURBS повышает эффективность автоматизированных геопространственных систем за счет уменьшения времени обработки и требуемого объема памяти. Применение NURBS в вычислительной технике - уже давно свершившийся факт - в графических пакетах всех операционных систем встроены алгоритмы обработки и визуализации NURBS, например в графических пакетах низкого уровня: DirectX и OpenGL для Windows. Однако при построении ЦМР возникают препятствия, связанные с эффектом возникновения в некоторых ситуациях нарушения монотонности в изменении поверхности - локальное появление ложных осцилляций. В заявляемом способе это препятствие устраняется либо путем добавления новых точек в массив для интерполяции, либо путем использования методов изогеометрической аппроксимации сплайнами. В первом случае разрешение проблемы связано с повышением значимости работы эксперта в итерационной процедуре построения NURBS, во втором с существенным усложнением математических алгоритмов технологии.
В предлагаемом способе реализована технология построения ЦМР на основе NURBS в виде итерационной экспертной автоматизированной процедуры. В качестве языка программирования использован язык MatLab. В этой системе качество построения ЦМР определяется путем экспертного сравнения положения изолиний, вычисленных по NURBS, с положением соответствующих изогипс (изобат) на исходной карте.
В конкретной реализации предлагаемого способа источником информации о рельефе служат растровые карты.
В общем случае при аппроксимации профиля рельефа одномерными сплайнами следует задавать значения двух первых производных в конечных точках разреза. Однако такая информация неизвестна, и получить ее на практике нельзя. Поэтому в качестве базового сплайна для аппроксимации профиля рельефа по разрезу использован простейший кубический сплайн с нулевыми граничными производными. Ввиду того, что не существует никаких явно заданных двумерных сплайнов, так как нельзя построить бесконечную систему алгебраических уравнений для согласования двух первых производных по всем направлениям на смежных границах двух кусков сплайновой поверхности, построение двумерной сплайн-функции производится с использованием тензорного произведения одномерных сплайнов. Согласование первых двух дифференциалов ЦРМ для смежных прямоугольных участков карты обеспечивается перекрытием областей задания смежных NURBS.
Таким образом, технология построения ЦМР в аналитическом виде на основе NURBS позволяет исключить этап триангуляции и тем самым исключить недостатки существующих технологий. Предлагаемая реализация технологии может быть адаптирована к другим типам исходной информации, и в нее могут быть включены более сложные типы базовых сплайнов.
При использовании заявляемого способа и устройства для его осуществления, предназначенного для съемки рельефа дна акватории, выполняется требование к точности определения глубины при съемки рельефа дна акватории, установленное действующими нормативными документами, что обусловлено возможностью измерения доплеровского сдвига частоты опорного гидроакустического сигнала гидроакустического доплеровского лага, абсолютной скорости движения судна с эхолотом по внешним источникам информации (например, спутниковой навигационной системы типа GPS), по которым определяют среднюю вертикальную скорость распространения звука в водной среде.
При съемке рельефа дна эхолотом средняя квадратическая погрешность определения вертикальной скорости распространения звука не должна превышать ±7,5 м/с. Выполнение данного требования может быть обеспечено, если скорость движения судна будет определяться со средней квадратической погрешностью, не превышающей ±0,037 м/с, что возможно выполнить при условии определения геодезических координат со средней квадратической погрешностью, не превышающей ±7,8 м.
Установленные на гидрографических судах навигационные системы, в частности совмещенные приемоиндикаторы спутниковых и радионавигационных систем берегового базирования, позволяют определять геодезические координаты с точностью ±6,0 м, а при их работе в дифференциальном режиме с точностью ±3,0 м.
При сопряжении топографических и навигационных растровых карт при картировании рельефа дна ошибки получаемой растровой карты составляют не более двух пикселей, например для масштаба карт 1:250000 с разрешением 400 dpi это составляет 30 м на поверхности земли, что не превышает ошибок самой растровой карты.
В процессе съемки из множества измеренных глубин отбираются информативные глубины, которые исправляются поправками за скорость звука и привязываются к рассчитанным вероятнейшим координатам для нанесения на рабочий планшет и оперативной оценки качества съемки.
Выполнение гидролокационного зондирования дна параметрическим гидролокатором, установленными на отличных горизонтах глубины от судового эхолота с возможностью перемещения как в вертикальной, так и в горизонтальной плоскостях методом секторного обзора со сканированием характеристики направленности в режиме излучения параметрической антенны с приемом отраженных сигналов антенной таких же размеров, как антенна накачки параметрической антенны, при этом ширина характеристики направленности в режиме приема превышает величину сектора обзора, а плоскость сканирования антенны отклонена относительно положения вертикальной локации на угол 15 градусов в сторону движения судна, позволяет получить панорамное изображение рельефа дна с находящимся на дне трубопроводом.
Применение такого комплексирования, позволяющего сочетать возможности бокового обзора и поиска под слоем донных осадков, в сочетании с картированием морского дна по измеренным глубинам, точки которых привязаны к координатам, обеспечивает контроль находящихся на дне и заиленных трубопроводов в пределах шельфовой зоны, в бассейне рек и внутренних водоемов.
Практическая реализация заявляемого способа и устройства для его осуществления технической сложности не представляет ввиду того, что для его реализации используются штатные измерительные средства, установленные на гидрографических судах, предназначенных для съемки рельефа дна.
Источники информации
1. Коломийчук Н.Д. Гидрография. Л., ГУНиО МО СССР, 1988, с.240-277.
2. Hare R. Depth and position error budgets for multibeam echosounding // International Hydrographic Review. 1995, v.LXXII, №2, p.37-69.
3. Патент RU №2340916.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
Изобретение относится к гидрографии, в частности к способам и техническим средствам барометрической съемки рельефа дна путем определения глубин на заданной акватории с определением их геодезических координат. Техническим результатом изобретения является повышение точности съемки рельефа дна акватории. В отличие от известного способа, дополнительно выполняют гидролокационное зондирование дна гидролокатором и/или промерным эхолотом, установленными на отличных горизонтах глубины от судовых гидроакустических средств с возможностью их перемещения, как в вертикальной, так и в горизонтальной плоскостях, методом секторного обзора со сканированием характеристики направленности в режиме излучения параметрической антенны с приемом отраженных сигналов антенной таких же размеров, как антенна накачки параметрической антенны, при этом ширина характеристики направленности в режиме приема превышает величину сектора обзора, а плоскость сканирования антенны отклонена относительно положения вертикальной локации на угол 15 градусов в сторону движения судна. Дополнительно предложено устройство для реализации способа. 2 н.п. ф-лы, 6 ил.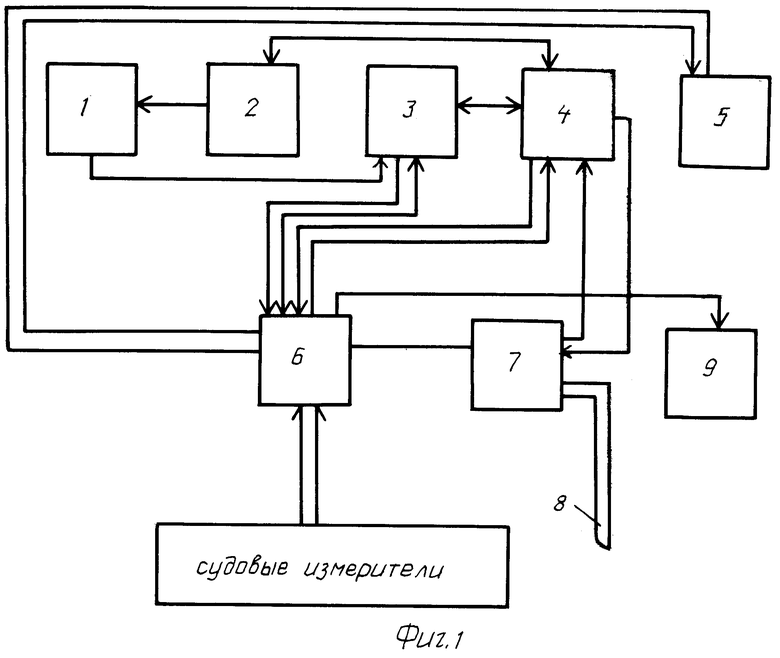
1. Способ съемки рельефа дна акватории, включающий излучение гидроакустических сигналов в направлении дна, прием отраженных от поверхности дна сигналов, измерение расстояний от приемоизлучающей антенны до дна, определение координат судна по внешним источникам информации, измерение бортовой, килевой и вертикальной качки, истинного курса и скорости судна, привязку результатов измерений по времени, определение истинных значений глубин с определением поправки за отклонение действительной скорости звука в воде от расчетной, картирование полученной информации с определением геодезических координат измеренных глубин, в котором при определении истинных глубин поправку за отклонение действительной скорости звука в воде от расчетной определяют в соответствии с зависимостью: ΔZv=H(Ccp/Co-1), где Н - глубина под килем (H=ΣCiti/2), Ccp=Vc4fиcosαΔfд - средняя скорость распространения звука в воде, Со - скорость распространения звука в воде, на которую рассчитан эхолот, fи - частота излучения гидроакустического сигнала гидроакустическим доплеровским лагом, Δfд - доплеровский сдвиг частоты между излученным и отраженным гидроакустическими сигналами гидроакустического лага от морского дна, α - угол, образованный направлением излучения гидроакустического сигнала до поверхности дна и горизонтом, Vc - скорость судна, определенная по геодезическим координатам; Ci - скорость распространения звука в воде при измерении глубин эхолотом, ti - промежуток времени между излучением сигнала и приемом эхосигнала от дна, при картировании рельефа дна выполняют сопряжение топографических и навигационных растровых карт, отличающийся тем, что дополнительно выполняют гидролокационное зондирование дна гидролокатором и/или промерным эхолотом, установленными на отличных горизонтах глубины от судовых гидроакустических средств с возможностью их перемещения как в вертикальной, так и в горизонтальной плоскостях методом секторного обзора со сканированием характеристики направленности в режиме излучения параметрической антенны с приемом отраженных сигналов антенной таких же размеров, как антенна накачки параметрической антенны, при этом ширина характеристики направленности в режиме приема превышает величину сектора обзора, а плоскость сканирования антенны отклонена относительно положения вертикальной локации на угол 15° в сторону движения судна.
2. Устройство для осуществления способа, содержащее приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок управления и блок сбора, обработки информации и картирование рельефа дна акватории, в котором выход приемопередающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизмерительного блока подключены к входу блока сбора обработки информации и картирования рельефа дна акватории, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна, блок определения средней скорости распространения звука в воде в направлении излучения гидроакустического сигнала, вход которого через блок управления соединен с выходом судового гидроакустического доплеровского измерителя скорости и выходом приемника радионавигационной или/и спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна акватории, отличающееся тем, что дополнительно введены гидролокатор со сканирующей характеристикой направленности, соединенный с судном кабель-тросом, и соединенный своими входами с выходами блока управления и входом блока сбора, обработки информации и картирования рельефа дна акватории, модуль визуализации области рельефа, соединенный своим входом с выходом блока сбора, обработки и картирования рельефа дна акватории.
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272303C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2292062C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| Захватное устройство | 1987 |
|
SU1426786A1 |

