Область техники, к которой относится изобретение
Настоящее изобретение относится к приводу и, в частности, противоблокировочному электромеханическому приводу для перемещения детали летательного аппарата.
Уровень техники
Приводы могут использоваться для перемещения детали летательного аппарата, а именно шасси летательного аппарата, например, управления передней стойкой шасси. Такие приводы должны, безусловно, обладать высокой точностью и иметь очень низкую вероятность отказа. Например, в приводе необходимо использовать по крайней мере два режима работы, когда имеется, например, вспомогательный или аварийный режим работы, в котором обеспечивается движение детали летательного аппарата в случае нарушения нормального режима работы или возникновения отказа. В таком вспомогательном или аварийном режиме работы может обеспечиваться активное перемещение детали летательного аппарата либо просто остается возможность перемещать деталь, несмотря на то, что она соединена с приводом (например, с приводом управления шасси). Вспомогательный или аварийный режим работы может допускать свободное ориентирование шасси.
Существует два основных вида электромеханических приводов, а именно приводы линейного перемещения и приводы вращения. В приводах линейного перемещения обычно используется электродвигатель, соединенный через редуктор с роликовым или шариковым ходовым винтом. Вращательное движение электродвигателя, характеризующееся высокой скоростью и малым крутящим моментом, преобразуется в линейное перемещение с малой скоростью и большим усилием. В приводах вращения также обычно используется электродвигатель, соединенный с редуктором, где вращательное движение электродвигателя с высокой скоростью и малым крутящим моментом преобразуется во вращательное движение с малой скоростью и высоким крутящим моментом. В зависимости от конкретного применения может потребоваться либо линейное перемещение, либо вращение. Например, в механизме уборки-выпуска шасси летательного аппарата может потребоваться привод линейного перемещения, в то время как для управления створками или управления поворотом колеса передней стойки шасси летательного аппарата может потребоваться привод вращения.
Приводы, используемые в существующих летательных аппаратах, обычно представляют собой гидромеханические приводы. Существует потребность снижения доли гидравлических систем в больших коммерческих летательных аппаратах и использования вместо гидромеханических приводов электрических приводов. В электромеханических приводах, как в приводах линейного перемещения, так и в приводах вращения, имеются движущиеся части, например, шестерни в редукторах, которые могут вызвать механическое блокирование редуктора, в результате чего будет невозможно его эффективное и/или безопасное функционирование. Поэтому необходим электромеханический редуктор, который, хотя бы отчасти, был противоблокировочным.
Предложено достаточно большое число конструкций, относящихся к противоблокировочным приводам. В качестве примера можно привести конструкции, раскрытые в заявке US 2005/0103928 и патентах US 3986412, US 4215592, US 4488744, US 4858490, US 5071397, US 5120285, US 5152381, US 5518466 и US 5779587. Предложенные конструкции, однако, обладают разными недостатками.
В некоторых конструкциях для случая блокировки привода используется сцепление/расцепление шестерен, находящихся во взаимном зацеплении, например, зубчатых муфт или иных расцепляемых соединительных механизмов, предназначенных для передачи высоких крутящих моментов, требующих сложных механизмов (см., например, US 2005/0103928, US 4488744, US 5071397 и US 5779587).
В некоторых предложенных конструкциях для обеспечения защиты от блокирования привода используется разрушение деталей привода, специально предназначенных для этого в случае блокировки привода (см., например, US 5518466, где описана система, включающая срезные шпильки, предназначенные для разрушения в случае блокирования). Эти системы являются системами одноразового использования, и всегда требуется замена по крайней мере части привода для продолжения его работы в своем основном режиме работы. Обычно работа таких систем защищается разрушением шпильки при превышении крутящего момента заданного порогового уровня. Однако задание порогового уровня не может исключать разрушение срезной шпильки при отсутствии блокирования и/или слишком медленного разрушения срезных шпилек в случаях частичного или полного блокирования.
Некоторые предложенные конструкции чрезмерно громоздки или тяжелы для использования в некоторых случаях применения (см., например, US 4215592).
В некоторых предложенных конструкциях перемещение на выходе привода ограничено некоторым угловым интервалом (обычно менее одного полного оборота на выходе), например, из-за наличия кабелей, препятствующих большому числу оборотов (см., например, US 5152381, US 4858490 и US 3986412). В некоторых предложенных конструкциях возможно вращение одного или более первичных двигателей в, по крайней мере, одном режиме работы привода.
Работа некоторых предложенных конструкций зависит от наличия электропитания в случае нарушения основного режима работы и/или требует использования более, чем одного первичного двигателя. Подобные требования в некоторых случаях могут быть недостатком, поскольку зависят от наличия источника питания и/или нескольких первичных двигателей, что ведет к увеличению веса.
В некоторых предложениях существуют ограничения по передаточному отношению используемых редукторов, а значит, и крутящему моменту, обеспечиваемому приводом. Например, привод по US 5120285, по-видимому, имеет такое ограничение. В приводе по US 5120285 также, вероятно, возможна ситуация, когда не могут быть использованы ни основной, ни вспомогательный режимы работы.
В настоящем изобретении ставится задача создания привода, в котором один или более из упомянутых выше недостатков выражены не столь сильно. В альтернативном варианте или дополнительно, в настоящем изобретении ставится задача создания усовершенствованного привода, например, привода, обладающего большей эксплуатационной гибкостью в отношении возможных применений, по сравнению с приводами, предложенными в, по крайней мере, некоторых из упомянутых известных документов. В альтернативном варианте или дополнительно, в настоящем изобретении ставится задача создания противоблокировочного привода для применения в летательном аппарате, для работы которого не требуется централизованная гидравлическая система летательного аппарата, причем привод, например, представляет собой электромеханический привод вращения.
Раскрытие изобретения
В настоящем изобретении предложен привод, содержащий:
корпус,
первичный двигатель для создания вращательного движения,
первый редуктор, установленный для преобразования, в процессе работы, вращательного движения от первичного двигателя во вращательное движение, имеющее более высокий крутящий момент и меньшую скорость, причем первый редуктор содержит кожух, закрепленный так, что он может вращаться относительно корпуса привода,
второй редуктор, установленный для преобразования вращательного движения кожуха первого редуктора во вращательное движение, имеющее более низкий крутящий момент и более высокую скорость, и
тормоз, установленный для воздействия на вращательное движение от второго редуктора, имеющее более низкий крутящий момент и более высокую скорость, благодаря чему в процессе работы,
когда первый редуктор не заблокирован, тормоз может быть приложен для создания сопротивления вращению кожуха первого редуктора относительно корпуса привода, а
когда первый редуктор заблокирован, тормоз может быть отпущен, благодаря чему кожух первого редуктора может вращаться относительно корпуса привода.
Таким образом, привод обладает протиблокировочными свойствами (характеристиками), так как в случае отказа первого редуктора, например, при его блокировании, на выходе привода блокирования не происходит, поскольку кожух первого редуктора может вращаться. Привод также может быть относительно легким по весу и компактным, поскольку для его работы не требуется тормоз и двигатель больших габаритов благодаря использованию как первого редуктора, так и второго редуктора. Конфигурация первого и второго редукторов может быть такой, что вероятность одновременного блокирования обоих редукторов будет очень малой. Конструкция первичного двигателя также может обеспечивать невысокую вероятность его отказа, при котором может возникнуть блокирование первичного двигателя. Поэтому конструкция привода может обладать противоблокировочными свойствами с ничтожно малым риском возникновения постоянного блокирования на выходе в процессе работы.
Первичный двигатель может быть закреплен неподвижно относительно корпуса. Первичный двигатель может представлять собой электродвигатель. Первичный двигатель и первый редуктор могут представлять собой основные устройства, обеспечивающие работу привода. Второй редуктор может образовывать по крайней мере часть резервных устройств для использования в случае отказа первичного двигателя или первого редуктора. Поэтому первый и второй редукторы могут обладать различными механическими свойствами. У второго редуктора передаточное отношение может быть, например, меньше, чем у первого редуктора. При этом второй редуктор может быть реверсивным, в то время как первый редуктор не может быть реверсивным. Масса второго редуктора может быть меньше, чем у первого редуктора.
В предпочтительном варианте передаточное отношение первого редуктора составляет 10:1 или более. Например, передаточное отношение может быть более 20:1 или даже более 30:1. В варианте выполнения изобретения конфигурация привода выбрана такой, что передаточное отношение первого редуктора составляет по крайней мере 50:1 и может создавать крутящий момент по крайней мере 8 500 Нм. Аналогично в предпочтительном варианте передаточное отношение второго редуктора составляет 10:1 или более. Например, передаточное отношение может превышать 20:1 или даже 30:1. Как упоминалось выше, передаточное отношение второго редуктора может быть меньше, чем у первого редуктора. Выбор передаточных отношений в первом и втором редукторах обусловлен различными требованиями. В первом редукторе передаточное отношение может выбираться с учетом размера и веса узла, объединяющего двигатель с редуктором. Для второго редуктора передаточное отношение может выбираться с учетом, во-первых, необходимости получения малого передаточного отношения при передаче движения в обратную сторону и, во-вторых, необходимости получения достаточно высокого передаточного отношения для снижения момента торможения.
Безусловно, первый и/или второй редукторы могут быть любого подходящего типа. Один или каждый редуктор могут, например, представлять собой или содержать червячную передачу, волновую передачу, планетарную передачу, эпициклическую передачу, гипоидную передачу, спиральную передачу или редуктор с передачей любого иного типа или конструкции. Конфигурация привода может быть такой, что выход первого редуктора в процессе работы должен обеспечить возможность вращения в пределах по крайней мере +/-180 градусов (т.е. по крайней мере один полный оборот). В предпочтительном варианте привод может обеспечивать несколько полных оборотов на выходе первого редуктора.
В предпочтительном варианте привод имеет переменную конфигурацию. При этом, если блокирование первого редуктора может быть устранено без использования запасных частей, и привод может быть отремонтирован без необходимости замены каких-либо его частей.
Например, в предпочтительном варианте привода отсутствуют части, которые должны быть разрушены для того, чтобы привод мог работать в заблокированном состоянии. В результате привод может продолжать свою работу после блокирования первого редуктора, а не только после устранения причины блокирования. Такие функциональные возможности коренным образом отличают привод от некоторых известных приводов, у которых требовалась замена частей, которые повреждались при блокировании.
В предпочтительном варианте привод является реверсивным, причем реверсивность особенно желательна в случае блокирования первого редуктора. Например, в предпочтительном варианте реверсивными являются как второй редуктор, так и первичный двигатель. Конфигурация второго редуктора и первичного двигателя может предусматривать их реверсивность в случае блокирования первого редуктора. Например, выход первого редуктора может приводиться во вращение другими устройствами, для чего требуется свободное движение второго редуктора и первичного двигателя с тем, чтобы не создавать потенциально разрушающих нагрузок на привод, пока его выход приводится во вращение упомянутыми другими устройствами. Конечно, первый редуктор не обязательно должен быть реверсивным в случае блокирования первого редуктора. Также первый редуктор может быть нереверсивным, в особенности, когда первый редуктор не блокируют.
Тормоз может представлять собой тормоз с электроприводом. В предпочтительном варианте тормоз срабатывает при подаче питания так, что при отсутствии питания тормоз автоматически отпускается.
Может быть предусмотрен амортизирующий механизм. В предпочтительном варианте движение привода, по крайней мере, когда происходит блокирование первого редуктора, демпфируется посредством такого амортизирующего механизма. Например, амортизирующий механизм может быть устроен таким образом, что когда блокируется первый редуктор и тормоз отпущен, кожух первого редуктора может вращаться относительно корпуса привода с воздействием демпфирования. В амортизирующем механизме могут использоваться гидравлические амортизирующие средства. В амортизирующем механизме могут использоваться инерционные амортизирующие средства. В амортизирующем механизме может использоваться пассивное амортизирующее устройство. Например, может использоваться электромагнитное демпфирование. Тормоз, например, может включать амортизирующий механизм. Например, тормоз может представлять собой часть более крупных тормозных устройств, в которых также имеется амортизирующий механизм. В амортизирующем механизме может использоваться активное амортизирующее устройство. Амортизирующий механизм может содержать электрический двигатель. Такой двигатель сможет обеспечивать активное демпфирование, используя контроллер, и/или пассивное демпфирование, используя контроллер, или пассивное демпфирование посредством закорачивания обмоток двигателя.
Привод может работать в пассивном режиме, если происходит блокирование первого редуктора. Благодаря свойству привода не передавать движение в случае блокирования первого редуктора, возможно сделать привод относительно легким. В отличие от этого потенциально компактного решения, при необходимости передачи движения в резервном или вспомогательном режиме работы, вес привода может быть увеличен. Например, может понадобиться использовать второй первичный двигатель. В другом варианте может понадобиться использовать дополнительные механизмы для расцепления первого редуктора и первичного двигателя и переключения первичного двигателя на выход привода (например, посредством вспомогательного редуктора). Использование привода, способного передавать движение в резервном/вспомогательном режиме работы, находится в пределах области притязаний настоящего изобретения, как будет понятно из дальнейшего изложения. Желательно, однако, чтобы в вариантах выполнения настоящего изобретения не использовались или не были нужны механизмы расцепления, которые требуются для расцепления элементов под нагрузкой.
В альтернативном варианте или дополнительно привод может продолжать активную работу в случае блокирования первого редуктора, например, продолжая приводить в движение выход привода. Привод может быть снабжен посредством первого первичного двигателя, упоминаемого ранее (здесь и далее "первый первичный двигатель"). В альтернативном варианте может быть использован второй первичный двигатель.
Преимуществом использования подобного второго первичного двигателя может быть обеспечение лучшего резервирования в приводе, и также можно снизить необходимость в использовании сложных механизмов для разъединения первого первичного двигателя и первого редуктора при блокировании. В приводе для получения вращательного движения может использоваться второй первичный двигатель. Второй первичный двигатель может быть связан со вторым редуктором. Например, второй редуктор может быть предназначен для преобразования, в процессе работы, вращательного движения второго первичного двигателя во вращательное движение, характеризующееся более высоким крутящим моментом и более низкой скоростью.
Второй первичный двигатель устанавливается таким образом, что в случае блокирования первого редуктора (тормоз при этом, конечно, отпускается, позволяя, тем самым, кожуху первого редуктора вращаться относительно корпуса привода), вращательное движение от второго первичного двигателя может быть преобразовано вторым редуктором во вращательное движение кожуха первого редуктора (так, что вращательное движение характеризуется более высоким крутящим моментом и более низкой скоростью, чем движение на входе второго первичного двигателя), причем получаемое при этом вращательное движение выдается на том же выходе, на котором выдается вращательное движение, когда первый редуктор не заблокирован. Конечно, второй первичный двигатель может быть установлен так, чтобы обеспечивать, в отсутствие блокирования первого редуктора, преобразование первым редуктором вращательного движения от первого первичного двигателя во вращательное движение, отличающееся более высоким крутящим моментом и более низкой скоростью, при этом тормоз сопротивляется относительному вращению между кожухом первого редуктора и корпусом привода.
В качестве второго первичного двигателя может использоваться электродвигатель. Первый первичный двигатель может быть больше, массивнее и/или более мощным, чем второй первичный двигатель. Второй редуктор и второй первичный двигатель могут рассматриваться как резервные устройства в случае отказа первого первичного двигателя или первого редуктора.
Привод может содержать механизм блокирования, который, в процессе работы, может заблокировать первый редуктор. В случае частичного блокирования первого редуктора, когда первый редуктор продолжает функционировать, хотя и со значительно пониженной эффективностью, механизм блокирования может быть использован для полного блокирования первого редуктора с тем, чтобы привод мог функционировать несмотря на то, что первый редуктор полностью заблокирован. Естественно, привод может быть наилучшим образом приспособлен для работы в одном из двух конкретных состояний, а именно когда первый редуктор работает свободно и когда первый редуктор полностью заблокирован. Поэтому было бы желательно уменьшить вероятность работы первого редуктора в каком-либо ином состоянии, например, в частично заблокированном состоянии.
Механизм блокирования может быть установлен таким образом, чтобы в процессе работы он способствовал вращению кожуха первого редуктора или заставлял его вращаться со скоростью, равной скорости движения на входе. Механизм блокирования может, например, в значительной мере препятствовать вращению кожуха редуктора относительно остальной части редуктора. Механизм блокирования может, например, содержать муфту, тормоз или иные устройства для зацепления и расцепления частей привода для того, чтобы (а) способствовать свободной передаче движения первым редуктором (в отсутствие блокирования) и (b) по существу заблокировать редуктор с тем, чтобы вращение входного вала вызывало соответствующее вращение кожуха и выхода первого редуктора.
Привод может содержать блок управления, например, в форме устройства обнаружения блокирования или включающий такие устройства, приспособленные для обнаружения блокирования первого редуктора.
Устройства обнаружения блокирования могут, например, быть приспособлены для мониторинга коэффициента полезного действия (КПД) привода. Например, устройства обнаружения блокирования могут контролировать выходной параметр привода. Измеренный выходной параметр привода может быть сопоставлен с ожидаемым выходным параметром, и, при наличии существенных расхождений, может быть сделано заключение о снижении КПД привода из-за блокирования.
В предпочтительном варианте конструкция привода должна подходить для перемещения деталей летательного аппарата. Деталью летательного аппарата может быть, например, шасси летательного аппарата. В этом случае привод может представлять собой рулевую машинку. В альтернативном варианте деталью летательного аппарата может быть поверхность управления полетом, например, предкрылок или закрылок. В другом варианте деталью летательного аппарата может быть створка, например створка ниши шасси. Выход привода может быть соединен с перемещаемой деталью посредством дополнительной зубчатой передачи. Дополнительная зубчатая передача может преобразовывать движение на выходе привода в движение с еще более высоким крутящим моментом и более низкой скоростью. Передаточное отношение дополнительной зубчатой передачи может превышать, например, 4:1. Таким образом, для того чтобы обеспечить движение детали в угловом интервале 100 градусов или более, требуется перемещение на выходе привода, значительно превышающее один полный оборот. Для определенных применений от привода требуется на выходе более двух полных оборотов или еще больше.
Привод, например, может быть частью летательного аппарата. В этом случае корпус привода может быть закреплен неподвижно с тем, чтобы сопротивляться вращению относительно прилегающей конструкции летательного аппарата.
В настоящем изобретении также предложен узел шасси летательного аппарата, включающий стойку шасси, например, переднюю опору шасси для закрепления по крайней мере одного колеса летательного аппарата, и привод, приспособленный управлять колесом, например, поворотом стойки вокруг ее оси, причем приводом может быть привод в соответствии с любой особенностью описанного здесь изобретения. В настоящем изобретении также предложен летательный аппарат, включающий такой узел шасси. В настоящем изобретении также предложен летательный аппарат, включающий деталь летательного аппарата, и привод, установленный для перемещения детали летательного аппарата, причем приводом является привод в соответствии с любой особенностью описанного здесь изобретения. Чистый вес летательного аппарата может превышать 50 тонн, хотя более предпочтителен чистый вес летательного аппарата более 200 тонн. По размерам летательный аппарат может соответствовать летательному аппарату, предназначенному для перевозки более 75 пассажиров, хотя более предпочтительным является размер, соответствующий летательному аппарату на 200 и более пассажиров. Поэтому следует иметь в виду, что признаки, соответствующие особенностям изобретения и относящиеся к приводу, предложенному в изобретении, могут содержаться в узле шасси летательного аппарата и летательном аппарате в том виде, как они предлагаются в изобретении.
Конечно, надо иметь в виду, что детали привода, предложенного в настоящем изобретении, могут изготавливаться отдельно друг от друга, в разных местах и даже странах, а затем собираться в совсем в другом месте и даже в другой стране. По этой причине в качестве объема настоящего изобретения предусматривается конструкция привода в соответствии с любым аспектом изобретения, предоставляемого настоящим описанием, без описания конструкции первичного двигателя (или первичных двигателей) привода. Такой первичный двигатель может быть, безусловно, установлен в привод или на него после изготовления привода. Например, привод должен быть полностью собран при его установке на объекте, готовым к использованию.
Изобретением предлагается также набор частей для изготовления привода в соответствии с любой особенностью описанного здесь изобретения. Набор частей может содержать по крайней мере кожух, первый редуктор, второй редуктор и тормоз. Набор также может включать один или более первичных двигателей. Следует, конечно, понимать, что признаки, соответствующие особенностям изобретения и относящиеся к приводу, предложенному в изобретении, могут относиться в равной степени к особенностям изобретения, относящимся к набору частей.
Изобретение предлагает также описание способа перемещения детали, в котором содержатся следующие операции:
передачи вращательного движения, имеющего первый крутящий момент, на вход первого редуктора;
приложения крутящего момента противоположного направления для по существу остановки вращательного движения первого редуктора в целом, причем крутящий момент противоположного направления прикладывается посредством второго редуктора;
выдачи на выходе первого редуктора вращательного движения, имеющего второй крутящий момент, более высокий, чем первый крутящий момент, и вызывающего движение детали; и
затем, после блокирования первого редуктора,
снятия крутящего момента противоположного направления, приложенного посредством второго редуктора.
Первый редуктор, в целом, при этом получает возможность вращаться, устраняя, тем самым, препятствие движению детали из-за блокирования первого редуктора.
Крутящий момент противоположного направления может быть приложен посредством тормоза, воздействующего на входе второго редуктора, при этом выход второго редуктора обеспечивает крутящий момент противоположного направления, имеющий более высокий крутящий момент в соответствии с передаточным отношением второго редуктора.
Блокирование первого редуктора может происходить в форме частичного блокирования. В этом случае способ может включать операцию полного блокирования первого редуктора (например, если это считается необходимым). Например, движение на выходе первого редуктора может быть сделано согласованным с движением на входе первого редуктора, и наоборот. Передаточное отношение первого редуктора может быть таким путем эффективно преобразовано в передаточное отношение 1:1. Это может быть достигнуто при соединении входа редуктора в заблокированном состоянии с его выходом, например, посредством тормоза, или муфты, или др.
Способ может включать операцию перемещения детали, выполняемый после блокирования первого редуктора, иными средствами, чем с использованием первого или второго редукторов. Перемещение детали может вызвать движение второго редуктора. В предпочтительном варианте перемещение детали демпфируется.
Способ может включать операцию перемещения детали, выполняемую после блокирования первого редуктора, посредством движения вращения на входе второго редуктора.
Способ может быть выполнен так, что деталь может перемещаться, после блокирования первого редуктора, без необходимости необратимого разрушения или замены любых других частей, используемых при выполнении способа.
Способ может включать операцию мониторинга блокирования привода или его части, например, первого редуктора. Способ может включать операцию обнаружения блокирования первого редуктора с последующим созданием крутящего момента противоположного направления посредством второго редуктора.
Следует, конечно, иметь в виду, что признаки различных особенностей изобретения не могут ограничиваться только особенностями изобретения, приведенными в описании в отношении того или другого объекта изобретения. Например, особенности изобретения, относящиеся к приводу, могут в равной степени относиться к особенностям изобретения, относящимся к способу перемещения детали, и наоборот. Так, например, способ может включать использование привода с любой особенностью настоящего изобретения. Привод, согласно изобретению, может обладать признаками, которые сделают его пригодным для выполнения способа, в соответствии с любой особенностью изобретения. Способ может быть выполнен в отношении детали, образующей часть летательного аппарата. Способ может быть выполнен, например, в отношении летательного аппарата.
Краткое описание чертежей
Далее приводится описание варианта выполнения изобретения, использованного для иллюстрации изобретения, со ссылками на приложенные чертежи, на которых:
Фиг.1 представляет разрез привода в соответствии с первым вариантом выполнения настоящего изобретения;
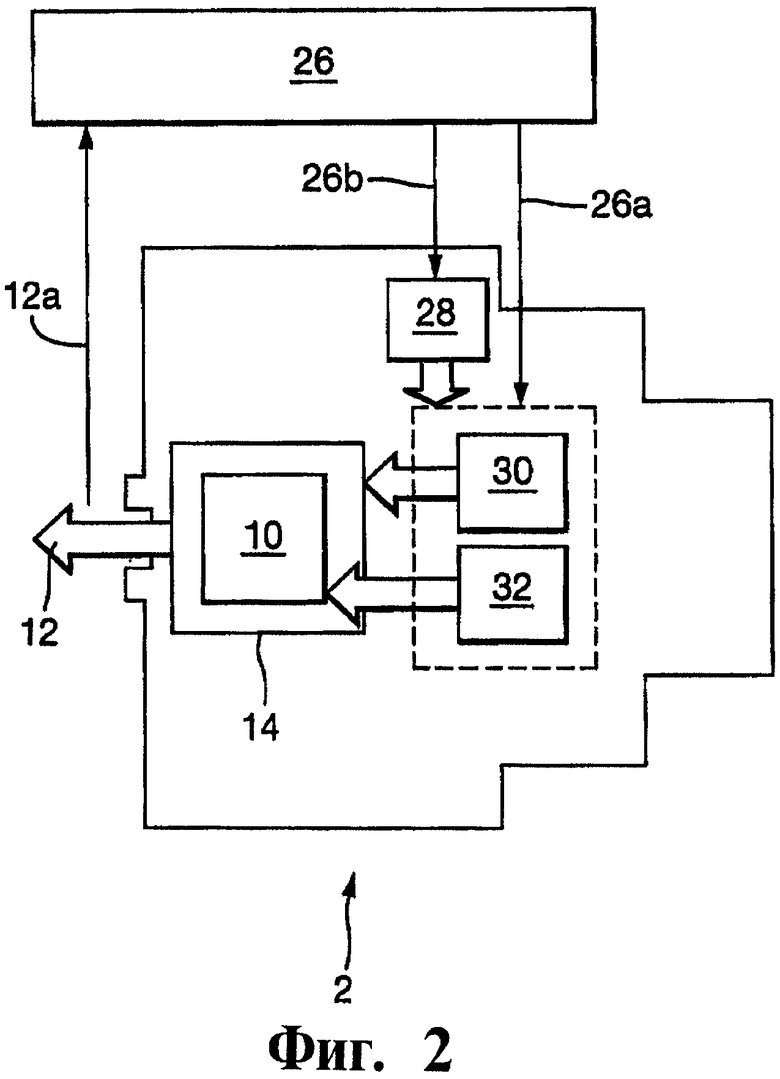
Фиг.2 представляет блок-схему привода в соответствии с вариантами выполнения изобретения, объединенного с системой диагностики; и
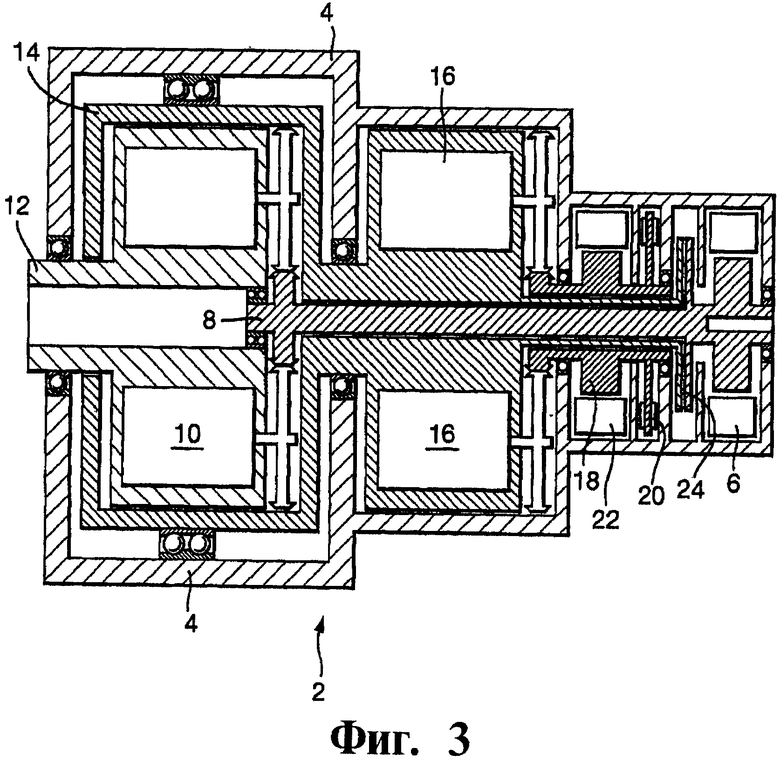
Фиг.3 - разрез привода в соответствии со вторым вариантом выполнения настоящего изобретения.
Осуществление изобретения
На Фиг.1 показан первый вариант выполнения изобретения, относящийся к противоблокировочному электромеханическому приводу вращения 2 с изменяемой конфигурацией, предназначенному для использования в качестве рулевой машинки передней опоры шасси большого пассажирского летательного аппарата. Привод 2 содержит наружный корпус 4, который прикреплен к примыкающей конструкции летательного аппарата (не показана). Привод имеет два различных режима работы. Первый режим работы является основным, нормальным режимом работы. Второй режим работы является вспомогательным и резервным, или аварийным режимом работы (например, со свободной ориентацией колеса).
В приводе 2 размещены электродвигатель вращения 6 с валом 8, который соединяет двигатель с первым редуктором 10. Электродвигатель представляет собой реверсивный бесщеточный двигатель постоянного тока с обмоткой, сохраняющей работоспособность при отказе отдельных элементов, с максимальным крутящим моментом примерно 27 Нм. Первый редуктор 10 преобразует вращательное движение от двигателя 6, с низким крутящим моментом и высокой скоростью, в движение с высоким крутящим моментом и низкой скоростью, выдаваемое на первичном выходном валу 12. Передаточное отношение редуктора составляет примерно 500:1, а КПД примерно 75%, в результате чего редуктор является нереверсивным. Максимальный выходной крутящий момент, развиваемый на выходном валу 12, составляет при этом примерно 10000 Нм. Выходной вал соединен через дополнительный редуктор (имеет передаточное отношение примерно 4:1, в результате чего общее передаточное отношение составляет 2000:1) со стойкой передней опоры шасси, при этом привод обеспечивает поворот передней опоры шасси в диапазоне углов (от минус 95 градусов до плюс 95 градусов). Выходной вал привода, при отсоединении его от передней опоры шасси, может свободно вращаться и совершать при этом множество оборотов без необходимости реверсного вращения.
Кожух 14 первого редуктора 10 установлен с возможностью вращения относительно корпуса 4 привода 2. В первом режиме работы вращение кожуха 14 редуктора не допускается. Это достигается путем соединения кожуха 14 редуктора со вторичным валом 18 через второй редуктор 16. В первом режиме работы второй редуктор 16 заторможен посредством тормоза 20. Выход второго редуктора 16 практически соединен с кожухом 14 первого редуктора 10. Второй редуктор 16 имеет более низкое передаточное отношение, составляющее примерно 50:1, является реверсивным и выполняет преобразование движения с низким крутящим моментом и высокой скоростью на его входе (т.е. на вторичном валу 18) в движение с высоким крутящим моментом и низкой скоростью на его выходе (т.е. на кожухе 14 первого редуктора 10). Таким образом, второй редуктор 16 может создать тормозное усилие с высоким моментом, которое предотвращает вращение кожуха 14 первого редуктора 10, посредством относительно легкого тормоза 20, создающего небольшой тормозной момент. Для противодействия крутящему моменту 10000 Нм, развиваемому первым редуктором 10, от тормоза 20 требуется удерживающая сила примерно 200 Нм (КПД редуктора в статических условиях значения не имеет) или более. Тормоз 20 представляет собой электрически управляемый тормоз, приводимый в действие подачей электрического питания и отключаемый при снятии питания. Тормоз 20 также связан с пассивным электромагнитным амортизирующим механизмом в форме демпфера 21, который в первом режиме работы не действует.
С приводом 2 связан блок управления 26, схематически показанный на Фиг.2, включающий систему диагностики. Блок управления 26 получает данные 12а о скорости вращения выходного вала 12, со счетчика оборотов (не показан). Блок управления 26 выдает сигналы 26а, 26b управления для управления работой двигателя 6 привода 2 и тормоза 20.
В первом режиме работы (т.е. при нормальной работе) зубчатая передача первого редуктора 10 вращается независимо от его кожуха 14 (который также является выходом второго редуктора 16). Двигатель 6 получает от блока управления 26 (посредством сигнала 26а) команду приводить в движение первый редуктор 10. Вращению кожуха 14 редуктора 10 относительно корпуса 4 по существу препятствует тормоз, приводимый в действие по команде от блока управления 26 (по сигналу 26b). Таким образом, вращение двигателя 6 с высокой скоростью и малым крутящим моментом преобразуется во вращение первичного выходного вала 12 с низкой скоростью и высоким крутящим моментом.
Скорость на выходе привода (на валу 12) измеряется блоком управления 26 (посредством принимаемого сигнала 12а) и постоянно сравнивается с ожидаемой выходной скоростью. В случае блокирования в первом редукторе 10 в блок управления 26 поступают данные о скорости на выходном валу 12 ниже ожидаемой (по сравнению с данными, ожидаемыми с учетом сигналов 26а, b управления, передаваемых блоком управления 26 в привод 2). В ответ на получение данных о более низкой, по сравнению с ожидаемой, скоростью вала блок управления 26 вырабатывает решение о возникшем блокировании первого редуктора 10 и изменяет сигнал 26b управления, в результате чего происходит переключение режима работы (показано блоком 28). В первом варианте выполнения переключение режима работы происходит в виде прекращения подачи сигнала 26b, вследствие чего происходит отпускание тормоза 20. Благодаря этому кожух 14 привода 2 получает возможность вращаться относительно корпуса 4 привода, причем вращаться со скоростью, равной скорости на выходе второго редуктора 16, в силу имеющейся взаимосвязи между ними. Также прекращается подача сигнала 26а управления, поэтому двигатель 6 перестает получать питание.
В случае блокирования работа привода переключается из первого режима работы, в котором основные устройства (представленные блоком 32 на Фиг.2), в виде двигателя 6 и первого редуктора 10, приводят во вращение выходной вал 12, во вспомогательный режим работы, в котором вспомогательные устройства (представленные блоком 30 на Фиг.2), связанные с кожухом 14 первого редуктора, по-другому воздействуют на кожух (отпуская тормоз 20) с тем, чтобы дать возможность вращаться выходному валу 12. Как было упомянуто выше, и второй редуктор, и двигатель являются реверсивными. Таким образом, несмотря на то, что первый редуктор 10 может заблокироваться и он все еще остается соединенным с выходным валом 12, выходной вал, тем не менее, получает возможность вращаться относительно корпуса 4 привода 2, способствуя тем самым свободному вращению выходного вала 12. Это свободное вращение выходного вала 12 обеспечивается блоком управления, по команде которого, при обнаружении блокирования в приводе, немедленно отпускается тормоз 20.
Вращение выходного вала 12 демпфируется электромагнитным амортизирующим устройством 21, связанным с тормозом 20. Способность демпфирования движения выходного вала важна в случае работы привода во втором (резервном/аварийном) режиме работы, поскольку в противном случае может возникнуть "шимми" (самопроизвольные угловые колебания передней опоры шасси). Во втором режиме работы привода передняя опора шасси попадает в состояние свободной ориентации. Управление летательным аппаратом в таком состоянии может быть осуществлено посредством дифференциального торможения колес основного шасси.
В случае блокирования в первом редукторе блок управления 26 автоматически переводит привод во второй режим работы. Если блокирование будет устранено, тогда блок управления 26 может быть использован для переключения привода обратно в первый режим работы.
Первый вариант выполнения изобретения представляет собой компактную конструкцию противоблокировочного привода, в котором, в случае блокирования первого редуктора, привод обеспечивает возможность свободного ориентирования передней опоры шасси. В некоторых применениях желательно, чтобы привод обеспечивал передачу движения как в основном, так и в резервном режимах работы. Такой привод с двойным резервированием предложен во втором варианте выполнения изобретения, показанном на Фиг.3.
На Фиг.3 показан противоблокировочный электромеханический привод 2 вращения с изменяемой конфигурацией, содержащий два электродвигателя 6, 22, каждый из которых может создавать движущую силу, вызывающую вращательное движение, выдаваемое на выходном валу 12 привода. Части привода согласно второму варианту выполнения, аналогичные эквивалентным частям привода по первому варианту выполнения, имеют те же цифровые позиции. Далее приводится описание основных различий между приводом по второму варианту выполнения и приводом из первого варианта выполнения.
Так же как и в первом варианте выполнения, привод 2 на Фиг.3 включает первый двигатель 6, связанный с первым редуктором 10. Муфта 24 обеспечивает соединение и разъединение первого двигателя 6 и кожуха 14 первого редуктора. В первом режиме работы муфта 24 освобождена, разъединяя выход первого двигателя 6 и кожуха 14 первого редуктора 10. Кроме того, кожух 14 удерживается неподвижно относительно корпуса 4 привода посредством тормоза 20, воздействующего на кожух 14 через второй редуктор 16. Тормоз 20 в этом варианте выполнения не содержит никаких дополнительных амортизирующих средств (в любом случае второй двигатель 22 может выполнять, при необходимости, активное демпфирование).
Привод 2 на Фиг.3 включает второй двигатель 22, связанный со вторым редуктором 16. В этом варианте выполнения второй редуктор обладает высоким передаточным отношением (таким же, как и у первого редуктора) и не является реверсивным. Во втором режиме работы используется муфта 24, соединяя выход первого двигателя 6 с кожухом 14 первого редуктора 10. Таким образом, вход 8 и выход 12 первого редуктора 10 оказываются непосредственно соединенными и взаимозависимыми, в результате чего редуктор 10 действует как полностью заблокированный. Кроме этого отпускается тормоз 20, позволяя кожуху 14 вращаться относительно корпуса 4 привода. Второй двигатель 22 приводит во вращение вторичный вал 18, который передает вращательное движение с низким крутящим моментом и высокой скоростью на вход второго редуктора 16, в результате чего на кожух 14 первого редуктора 10 передается движение с высоким крутящим моментом и низкой скоростью. В результате того, что используемая муфта 24 эффективно блокирует первый редуктор, выходной вал 12 вращается вместе с кожухом 14. Крутящий момент, подводимый к выходному валу от второго двигателя через второй редуктор, равен (или аналогичен) крутящему моменту, подводимому к выходному валу, при работе от первого двигателя через первый редуктор. При этом как в первом режиме работы, так и во втором привод выдает вращательное движение на выходном валу. Второй режим работы, будучи резервным режимом работы, может рассматриваться как альтернативный или аварийный режим работы, хотя и не уступает первому режиму работы, поскольку первый двигатель и первый редуктор, с одной стороны, и второй двигатель и второй редуктор, с другой стороны, эквивалентны по своим функциям, качеству и конструкции. Однако в связи с тем, что на рынке представлены редукторы нескольких видов, два редуктора могут быть различных видов с тем, чтобы избежать однотипных отказов, даже если они обладают одинаковыми/эквивалентными функциями.
Использование муфты 24, которая может практически заблокировать первый редуктор 10, может быть особенно полезно в случае частичного блокирования первого редуктора. Муфта 24 позволяет сделать взаимозависимыми вал 12 и кожух 14. Если, в случае частичного внутреннего блокирования, допустить свободное взаимное перемещение между валом 12 и кожухом 14, то это может вызвать потерю мощности и ее перераспределение в другом направлении в результате того, что внутренние шестерни первого редуктора продолжают двигаться и реверсируют первый двигатель 6 со скоростью большей, чем скорость вращения выходного вала 12. Мощность на выходе и КПД привода во втором режиме работы будут значительно снижены в случае частичного блокирования. Кроме того, если повреждение в первом редукторе ведет к периодическому блокированию редуктора и, вследствие этого, к движению толчками на выходе привода, желательно полностью заблокировать первый редуктор и переключить привод во второй режим работы. Муфта будет выполнять роль блокирующего механизма.
По аналогии с первым вариантом выполнения привод 2 во втором варианте выполнения связан с блоком управления, который в процессе работы может обнаружить блокирование и затем перейти на резервный режим работы. Блок-схема, приведенная на Фиг.2, может с успехом быть использована применительно и ко второму варианту выполнения. При этом в первом режиме работы блок управления 26 выдает сигнал 26а управления, по которому приводится в действие первый двигатель 6 привода 2. Кроме того, блок управления 26 выдает сигнал 26b управления, по которому (представлен блоком 28) должен включиться тормоз 20, а муфта 24 должна освободиться. Первый режим работы представлен на Фиг.2 блоком 32, воздействующим на редуктор 10, вырабатывающий выходной параметр 12, в то время как второй режим работы (представлен блоком 30, который может воздействовать на кожух 14 редуктора 10) блокируется (представлено блоком 28) по команде из блока управления 26. В случае блокирования в первом редукторе 10 в блок управления 26 поступают (стрелка 12а) данные, показывающие, что скорость на выходном валу 12 меньше ожидаемой. В ответ на это, блок управления 26 передает сигнал 26а управления, под действием которого первый двигатель 6 должен отключиться, а второй двигатель 22 должен включиться. Кроме того, блок управления 26 направляет сигнал 26b управления, под действием которого (представлен блоком 28) тормоз 20 должен быть отпущен, а муфта 24 должна использоваться. При этом привод 2 переходит во второй режим работы, как показано на Фиг.2 блоком 30, воздействующим на кожух 14 редуктора 10, пока первый режим работы блокируется.
Описанные выше варианты выполнения изобретения объединяет то, что в каждом из них предложен привод, содержащий корпус, первый первичный двигатель для создания вращательного движения, первый редуктор, установленный для преобразования вращательного движения от первого первичного двигателя во вращательное движение, имеющее более высокий крутящий момент вращения и более низкую скорость, причем первый редуктор содержит кожух, закрепленный с возможностью вращения относительно корпуса привода, и второй редуктор, установленный для преобразования вращательного движения кожуха первого редуктора во вращательное движение с более низким крутящим моментом и более высокой скоростью. Привод имеет по крайней мере два режима работы. В первом режиме работы, когда нет блокирования первого редуктора, взаимное вращение между кожухом первого редуктора и корпусом привода эффективно не допускается. Движение на выходе может обеспечиваться посредством первого первичного двигателя, приводящего в движение первый редуктор.
Использование второго редуктора обеспечивает возможность предотвращать вращение кожуха первого редуктора. Во втором режиме при условии, что нет блокирования второго редуктора, кожух первого редуктора вращается относительно корпуса привода. Движение на том же выходе привода, даже при заблокированном первом редукторе, допускается, поскольку кожух первого редуктора имеет возможность вращаться. В некоторых вариантах выполнения в этом режиме может приводиться во вращение второй редуктор для получения движения на выходе, в то время как в других вариантах выполнения функционирование привода сводится к тому, чтобы просто не препятствовать вращательному движению на выходе.
В то время как настоящее изобретение было описано и проиллюстрировано на примере конкретных вариантов выполнения, специалистам должно быть понятно, что в изобретении возможны различные изменения, не описанные конкретно в настоящем описании.
В модификации вышеописанного второго варианта выполнения первый и второй редукторы могут иметь различные передаточные отношения, так, что второй редуктор является реверсивным. При этом крутящий момент на выходе во втором режиме работы может быть уменьшен. Таким образом, в случае полного отказа источника питания тормоз отпускает корпус первого редуктора, а муфта соединяет выходной вал и корпус первого редуктора (конфигурация муфты выбрана такой, что муфта обеспечивает соединение при отключении электропитания). При этом выходной вал может приводиться во вращение и будет вращать в обратном направлении второй редуктор и второй двигатель. Если привод используется для управления передней опорой шасси, летательному аппарату будет обеспечено движение со свободным ориентированием. Демпфирование этого движения может обеспечиваться посредством дополнительного электромеханического демпфирующего механизма.
Привод может быть использован для перемещения и других деталей летательного аппарата, помимо передней опоры шасси.
Блок управления может включать специализированную систему диагностики для обнаружения и предотвращения ухудшения функционирования, которое может привести к блокированию. При условии контроля состояния привода и устранении незначительных дефектов до того, как они смогут вызвать серьезную опасность блокирования, второй, резервный режим работы может быть оставлен только для аварийного использования, и его надежность должна обеспечиваться в пределах малой наработки за срок службы. Подобная система диагностики может включать датчики положения, силы и тока для контроля сил, создаваемых приводом, и для обнаружения износа и снижения работоспособности.
Обнаружение блокирования датчиками скорости может быть заменено или дополнено датчиками крутящего момента или тока, а также датчиками положения.
В соответствии с другим вариантом выполнения, подробной иллюстрации которого не приводится, предлагается привод, имеющий первую приводную систему, содержащую первый первичный двигатель, соединенный через первый редуктор с выходом привода. Также имеется вторая приводная система, содержащая второй первичный двигатель, соединенный через второй редуктор с тем же выходом. При надлежащем функционировании всех деталей движения от первичных двигателей объединяются на выходе, обеспечивая возможность сложения скоростей. При отказе первой или второй приводной систем (например, блокирование редуктора) движение на выходе сохраняется на пониженном уровне за счет другой приводной системы, продолжающей функционировать без изменений. В соответствии с этим вариантом выполнения отсутствует необходимость в использовании тормоза для затормаживания второго редуктора, хотя для других целей тормозные устройства могут быть использованы. Таким образом, в настоящем изобретении также предлагается, согласно данной особенности, привод, содержащий корпус, первый первичный двигатель для создания вращательного движения, первый редуктор, установленный для преобразования, в процессе работы, вращательного движения от первого первичного двигателя во вращательное движение на выходе, имеющее более высокий крутящий момент и более низкую скорость, при этом первый редуктор содержит кожух, установленный с возможностью вращения относительно корпуса привода, второй первичный двигатель для создания вращательного движения и второй редуктор, установленный для преобразования, в процессе работы, вращательного движения от второго первичного двигателя во вращательное движение, имеющее более высокий крутящий момент и более низкую скорость, который воздействует на корпус первого редуктора, посредством чего в процессе работы, когда нет блокирования первого и второго редукторов, как первый, так и второй первичные двигатели могут одновременно подводить вращательное движение через первый и второй редукторы соответственно, и когда один, либо первый, либо второй редуктор, блокируется, выход первого редуктора может продолжать приводиться во вращение одним, либо первым, либо вторым первичным двигателем.
В тех случаях, в приведенном описании, когда упомянутые составные части или элементы имеют известные, очевидные и предсказуемые эквиваленты, эти эквиваленты подразумеваются настоящим описанием, даже если бы они отдельно от него предлагались. Для определения истинной области притязаний настоящего изобретения, которая должна трактоваться как охватывающая все вышеупомянутые эквиваленты, следует обратиться к формуле изобретения. Также следует иметь в виду, что составные части или признаки изобретения, которые описаны как предпочтительные, преимущественные, удобные и т.п., не являются обязательными и не ограничивают область притязаний независимых пунктов формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ ПРИВОДА ДЛЯ КОЛЕС ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2559191C1 |
| ПРИВОДНАЯ СИСТЕМА ДЛЯ ПОСАДОЧНОГО ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2675769C2 |
| БЛОК ПРИВОДА ДЛЯ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРОВАННЫМ ОХЛАЖДЕНИЕМ | 2012 |
|
RU2601794C2 |
| ПРИВОД | 2007 |
|
RU2466316C2 |
| КОНСОЛЬ КРЫЛА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2727642C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2466907C1 |
| БЛОК ПРИВОДА КОЛЕСА ДЛЯ ПРИСОЕДИНЕНИЯ К ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2598871C1 |
| СПОСОБ РАЗВОРОТА ПОСРЕДСТВОМ ТОРМОЗОВ НА МЕСТЕ И НА ЗЕМЛЕ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2416549C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2699452C1 |
| МОТОРИЗОВАННОЕ УСТРОЙСТВО ОТКРЫВАНИЯ И/ИЛИ ЗАКРЫВАНИЯ ДВЕРИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2667017C2 |
Изобретение относится к приводам агрегатов планера летательного аппарата. Привод (2) содержит корпус (4), первичный двигатель (6) для создания вращательного движения, первый редуктор (10), установленный для преобразования вращательного движения от первичного двигателя (6) во вращательное движение выходного вала с более высоким крутящим моментом и низкой скоростью вращения. Первый редуктор содержит кожух (14), закрепленный для вращения относительно корпуса (4) привода (2), и второй редуктор (16), установленный для преобразования вращательного движения кожуха (14) первого редуктора (10) во вращательное движение с более низким моментом и большей скоростью. Тормоз (20) установлен для воздействия на вращательное движение от второго редуктора (16). Когда первый редуктор (10), в процессе работы, не заблокирован, приложенный тормоз препятствует движению кожуха первого редуктора (10) относительно корпуса (4) привода (2). Когда первый редуктор (10) блокируется, тормоз (20) отпускается, благодаря чему кожух (14) первого редуктора получает возможность вращаться относительно корпуса (4) привода (2). Первый редуктор установлен с возможностью вращения на выходе в диапазоне от плюс 180° до минус 180°. Также может быть использован второй двигатель для вращения второго редуктора. Привод состоит из набора деталей привода и может быть использован для управления передней стойкой шасси летательного аппарата. Обеспечивается возможность перемещения детали при блокировании редуктора привода. 5 н. и 12 з.п. ф-лы, 3 ил.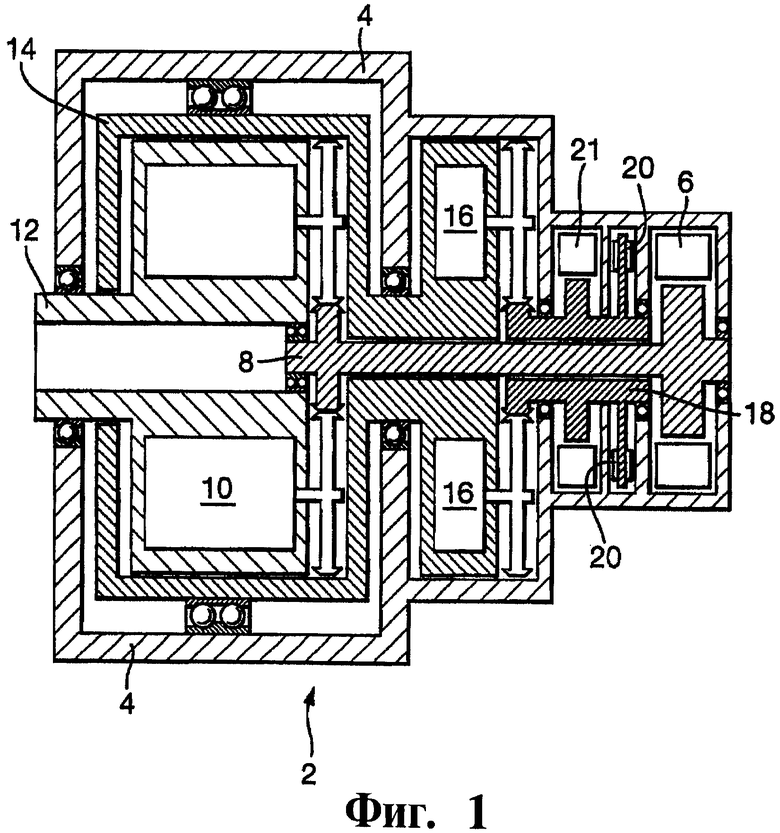
1. Привод, включающий корпус, первый первичный двигатель создания вращательного движения, первый редуктор, установленный с возможностью преобразования вращательного движения первичного двигателя во вращательное движение с более высоким крутящим моментом и меньшей скоростью и содержащий кожух, установленный с возможностью вращения относительно корпуса привода, второй редуктор, установленный для преобразования вращательного движения кожуха первого редуктора во вращательное движение с более низким крутящим моментом и более высокой скоростью, и тормоз, установленный с возможностью воздействия на вращательное движение на выходе второго редуктора с более низким крутящим моментом и более высокой скоростью, при этом если первый редуктор не заблокирован, тормоз приложен с возможностью сопротивления относительному вращению между кожухом первого редуктора и корпусом привода, а если первый редуктор заблокирован, тормоз отпущен, и кожух первого редуктора вращается относительно корпуса привода.
2. Привод по п.1, в котором первый первичный двигатель неподвижно закреплен относительно корпуса.
3. Привод по п.1, в котором передаточное отношение первого редуктора превышает 30:1.
4. Привод по п.1, в котором передаточное отношение второго редуктора меньше передаточного отношения первого редуктора.
5. Привод по п.1, в котором первый редуктор установлен с возможностью вращения на выходе в диапазоне от плюс 180° до минус 180°.
6. Привод по п.1, который является реверсивным при блокировании первого редуктора.
7. Привод по п.1, который включает амортизирующий механизм, обеспечивающий демпфирование движения привода при блокировании первого редуктора.
8. Привод по п.1, который включает второй первичный двигатель для создания вращательного движения, связанный со вторым редуктором.
9. Привод по п.8, который включает механизм блокирования, блокирующий первый редуктор в процессе работы.
10. Привод по п.1, который включает блок управления для обнаружения блокирования первого редуктора.
11. Узел шасси летательного аппарата, включающий стойку шасси, на которой закреплено по меньшей мере одно колесо, и привод управления передней стойкой шасси, выполненный в виде привода по п.1.
12. Летательный аппарат, включающий деталь летательного аппарата и привод перемещения детали летательного аппарата, выполненный в виде привода по п.1.
13. Набор частей привода по п.1, который включает корпус, первый редуктор, второй редуктор и тормоз.
14. Способ перемещения детали, включающий подачу вращательного движения с первым крутящим моментом на вход первого редуктора, приложение крутящего момента противоположного направления с возможностью остановки вращательного движения первого редуктора посредством второго редуктора, выдачу с выхода первого редуктора вращательного движения со вторым крутящим моментом, более высоким, чем первый крутящий момент, вызывающим движение детали, и после блокировки первого редуктора снятие крутящего момента противоположного направления, приложенного посредством второго редуктора с обеспечением возможности вращения первого редуктора и устранения препятствия движению детали из-за блокировки первого редуктора.
15. Способ по п.14, в котором крутящий момент противоположного направления прикладывают посредством тормоза, воздействующего на вход второго редуктора, на выходе которого создают крутящий момент противоположного направления, имеющий более высокий крутящий момент в соответствии с передаточным отношением второго редуктора.
16. Способ по п.14, в котором после блокировки первого редуктора выполняют перемещение детали другими устройствами, помимо первого и второго редукторов.
17. Способ по п.14, в котором дополнительно производят мониторинг возможности блокировки первого редуктора, обнаружение блокировки первого редуктора и снятие крутящего момента противоположного направления, приложенного через второй редуктор.
| Способ определения адгезии металлической пленки к диэлектрической подложке | 1985 |
|
SU1310699A1 |
| US 5779587 А, 14.07.1998 | |||
| US 3986412 А, 19.10.1976 | |||
| US 5071397 А, 10.12.1991 | |||
| КОМБИНИРОВАННЫЙ ПРИВОД | 2004 |
|
RU2312794C2 |
| US 5152381 А, 16.10.1992 | |||
| US 5518466 А, 21.05.1996 | |||
| US 4856379 А, 15.08.1989 | |||
| Планетарный редуктор | 1990 |
|
SU1754988A1 |
| Зубчатая передача | 1976 |
|
SU1030602A1 |

