Область техники
Изобретение относится к способу введения в зацепления приводной системы с вращающимся колесом посадочного шасси летательного аппарата. Изобретение также относится к приводной системе для вращения одного или более колес посадочного шасси летательного аппарата с целью наземного выруливания (вперед или обратно) и/или раскручивания колеса перед приземлением, и/или для приложения тормозного крутящего момента к вращающемуся колесу(ам).
Предшествующий уровень техники
Самолету требуется наземное выруливание между местоположениями летных полей. Примером является выруливание между взлетно-посадочной полосой и местоположением (например, выходом для пассажиров на посадку), в котором пассажиры самолета должны производить посадку на самолет или высаживаться из самолета. Как правило, такое выруливание достигается с использованием тяги от двигателей самолета, чтобы продвигать самолет вперед, вызывая вращение колес посадочного шасси самолета. Поскольку скорости наземного выруливания обязательно являются относительно низкими, двигатели должны работать с очень низкой мощностью. Это означает относительно высокое потребление топлива в результате плохой эффективности поступательного движения при этой низкой мощности. Это приводит к увеличенному уровню как атмосферного, так и шумового локального загрязнения вокруг аэропортов. Более того, даже в том случае, когда двигатели самолета работают с низкой мощностью, обычно необходимо использовать тормоза для колес, чтобы ограничивать скорости наземного выруливания, что приводит к высокой степени износа тормоза.
Обратное перемещение гражданского самолета, например, в направлении от выхода для пассажиров на посадку, с использованием главных двигателей самолета не разрешается. Когда необходимо перемещение назад, или в других ситуациях, где наземное выруливание с помощью главного двигателя не может применяться, используются буксировочные грузовики для маневрирования в разных направлениях. Этот процесс является трудоемким и затратным.
Поэтому существует необходимость в приводной системе, чтобы передавать мощность колесам посадочного шасси самолета во время операций наземного выруливания. Также желательно использовать такую приводную систему для предварительного раскручивания колес перед приземлением, для того чтобы колеса уже вращались с их первоначальной скоростью вращения при приземлении во время касания земли, или приблизительно с такой скоростью. Такое раскручивание перед приземлением предпринимается для уменьшения износа шин при приземлении и уменьшения нагрузок, передаваемых на посадочное шасси самолета во время приземления.
Известный способ сцепления приводной системы с колесом посадочного шасси самолета описан в документе WO 2014/023939. Привод размещен таким образом, чтобы вращать приводную систему между положением, в котором звездочка входит в зацепление с роликовой цепью, и положением, в котором звездочка не может войти в зацепление с роликовой цепью.
Раскрытие изобретения
Первым объектом изобретения является способ введения в зацепление приводной системы с вращающимся колесом посадочного шасси летательного аппарата, включающий в себя этапы, на которых управляют двигателем для прикладывания крутящего момента к ведущему колесу, в результате чего ведущее колесо вращается; выдают команду на введение в зацепление приводу в момент времени введения в зацепление; приводят в действие привод в ответ на команду введения в зацепление для перемещения ведущего колеса из нейтрального положения в контактное положение, в котором оно контактирует с вращающимся ведомым передаточным механизмом во время первоначального контакта, при этом вращающийся ведомый передаточный механизм устанавливают таким образом, чтобы вращать колесо посадочного шасси летательного аппарата; затем после момента времени первоначального контакта приводят в действие привод для дополнительного перемещения ведущего колеса в положение зацепления, в котором ведущее колесо входит в зацепление с ведомым передаточным механизмом, причем расстояние от центра до центра между ведущим колесом и ведомым передаточным механизмом уменьшается, когда ведущее колесо перемещается в контактное положение и в положение зацепления, при этом способ дополнительно содержит этап, на котором управляют двигателем для уменьшения крутящего момента до более низкого заданного уровня в момент времени зацепления или после него, а также для того, чтобы поддерживать крутящий момент ниже заданного уровня до тех пор, пока не наступит время первоначального контакта, затем после момента времени первоначального контакта увеличивать крутящий момент выше заданного уровня.
Вторым объектом изобретения является приводная система для вращения колеса посадочного шасси летательного аппарата, включающая в себя ведущее колесо; ведомый передаточный механизм, приспособленный для установки в колесо посадочного шасси летательного аппарата; двигатель, расположенный таким образом, чтобы прикладывать крутящий момент к ведущему колесу, в результате чего это ведущее колесо вращается; привод, который отвечает на команду на введение в зацепление в момент времени для введения в зацепление, чтобы перемещать ведущее колесо из нейтрального положения в контактное положение, в котором оно контактирует с ведомым передаточным механизмом в момент времени первоначального контакта; затем после времени первоначального контакта ведущее колесо перемещается дополнительно в положение зацепления, в котором ведущее колесо входит в зацепление с ведомым передаточным механизмом, при этом расстояние от центра до центра между ведущим колесом и ведомым передаточным механизмом уменьшается, когда ведущее колесо перемещается в контактное положение и в положение зацепления, причем приводная система дополнительно содержит контроллер, который выполнен таким образом, чтобы управлять двигателем для уменьшения крутящего момента ниже заданного уровня в момент времени зацепления или после него, поддержания крутящего момента ниже заданного уровня до момента времени первоначального контакта, затем увеличения крутящего момента выше заданного уровня после момента времени первоначального контакта.
Двигатель уменьшает крутящий момент во время фазы уменьшения скорости вращения, затем заново прикладывает крутящий момент после времени первоначального контакта (т.е. в конце фазы уменьшения скорости вращения).
Уменьшение скорости вращения может быть инициировано запускающим сигналом, который может быть командой на введение в зацепление или каким-либо другим запускающим сигналом.
Крутящий момент может быть увеличен выше заданного уровня перед или после момента времени, когда ведущее колесо переместилось в положение зацепления.
Предпочтительно, ведомый передаточный механизм имеет Ngear зубьев или роликов, ведущее колесо имеет Npinion зубьев или роликов, которые входят в зацепление с зубьями или роликами ведомого передаточного механизма, когда ведущее колесо находится в положении зацепления. Ведущее колесо и ведомый передаточный механизм вращаются, соответственно, с угловыми скоростями ωpinion и ωgear во время первоначального контакта, и предпочтительно, коэффициент синхронизации [(ωpinion*Npinion)/(ωgear*Ngear)] во время первоначального контакта не равен 1. Коэффициент синхронизации может быть больше 1 (например, больше чем 1,02), но более предпочтительно, составляет меньше, чем 1 (например, меньше, чем 0,98 или меньше, чем 0,96).
По необязательному выбору, датчик расположен таким образом, чтобы определять угловую скорость ωgear ведомого передаточного механизма; обеспечивается контур регулирования, который отвечает за входной запрос по скорости, чтобы управлять двигателем таким образом, чтобы он вращался на угловой скорости, определяемой входным запросом по скорости; контроллер расположен таким образом, чтобы определять входной запрос по скорости в соответствии с передаточным отношением (Npinion/Ngear), угловую скорость ωgear ведомого передаточного механизма, определяемую датчиком, и заданный коэффициент синхронизации, при этом заданный коэффициент синхронизации выбирают таким образом, что ведущее колесо вращается на угловой скорости ωpinion во время первоначального контакта, а коэффициент [(ωpinion*Npinion)/(ωgear*Ngear)] не равен единице.
Как правило, ведомый передаточный механизм контактирует с ведущим колесом через серию соударений, когда ведущее колесо перемещается из контактного положения в положение зацепления, и каждое соударение вызывает всплеск электродвижущей силы или угловой скорости в двигателе. По необязательному выбору способ дополнительно содержит определение одного из всплесков и управление двигателем таким образом, чтобы изменять крутящий момент, прикладываемый к ведущему колесу в ответ на обнаружение одного из всплесков. По необязательному выбору способ дополнительно содержит определение полярности одного из всплесков и управление двигателем таким образом, чтобы изменять крутящий момент, прикладываемый к ведущему колесу, в соответствии с обнаруженной полярностью. Приводная система может содержать датчик, расположенный таким образом, чтобы обнаруживать всплески; и контроллер, выполненный таким образом, чтобы управлять двигателем для изменения крутящего момента, прикладываемого к ведущему колесу в ответ на обнаружение датчиком одного из всплесков.
В некоторых вариантах осуществления изобретения ведущее колесо или ведомый передаточный механизм могут представлять собой роликовый передаточный механизм, содержащий ряд роликов, которые входят в зацепление с зубьями, соответственно, ведомого передаточного механизма или ведущего колеса. Преимущество роликового передаточного механизма состоит в том, что он является более стойким к деформации колеса и несоосности между ведущим колесом и ведомым передаточным механизмом, по сравнению с конструкциями, в которых входят в зацепление зубчатые колеса. Каждый из рядов роликов может вращаться вокруг стержня, причем стержни по необязательному выбору поддерживаются кольцевым поддерживающим элементом, или между двумя кольцевыми поддерживающими элементами. В других вариантах осуществления изобретения ряды роликов могут быть обеспечены с помощью роликовой цепью (также известной как соединительная цепь, или соединительная роликовая цепь), проходящей вокруг внешней окружности поддерживающего элемента и фиксируемой на нем. Эта конструкция может быть менее дорогой для использования, чем конструкция обсуждавшегося выше роликового передаточного механизма.
Краткое описание чертежей
Далее будет приведено описание вариантов осуществления изобретения со ссылками на чертежи.
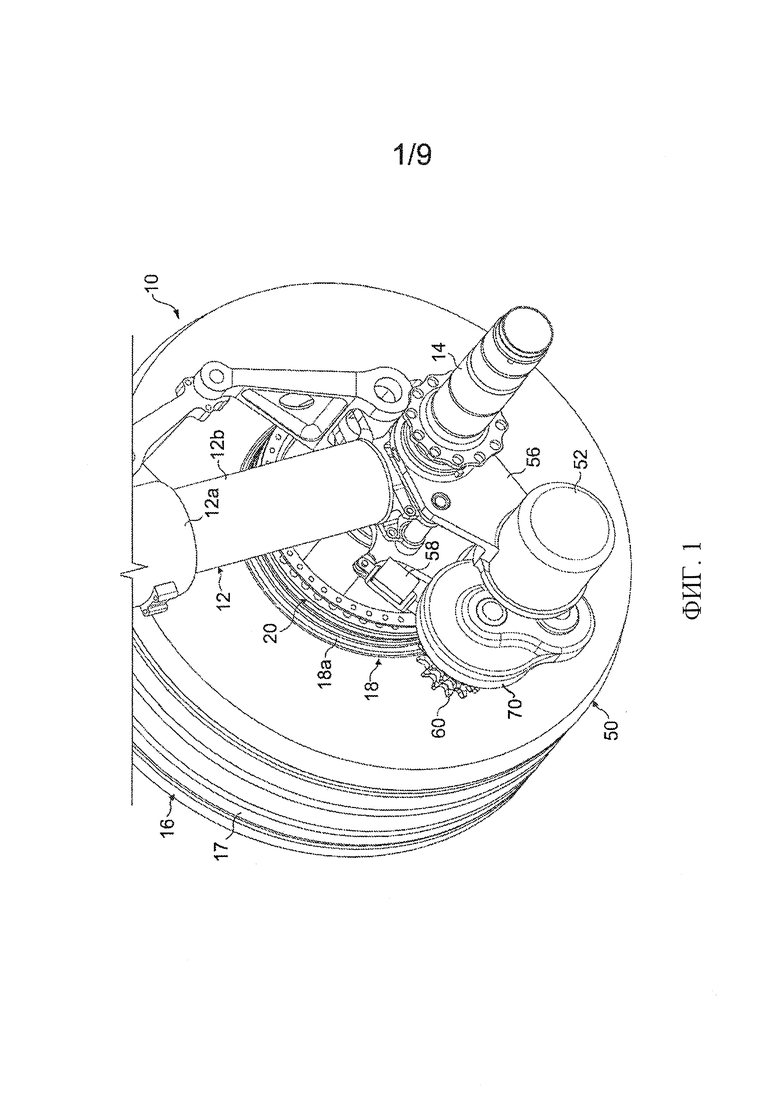
На фиг. 1 показана приводная система в соответствии с первым вариантом осуществления изобретения, вид в изометрии;
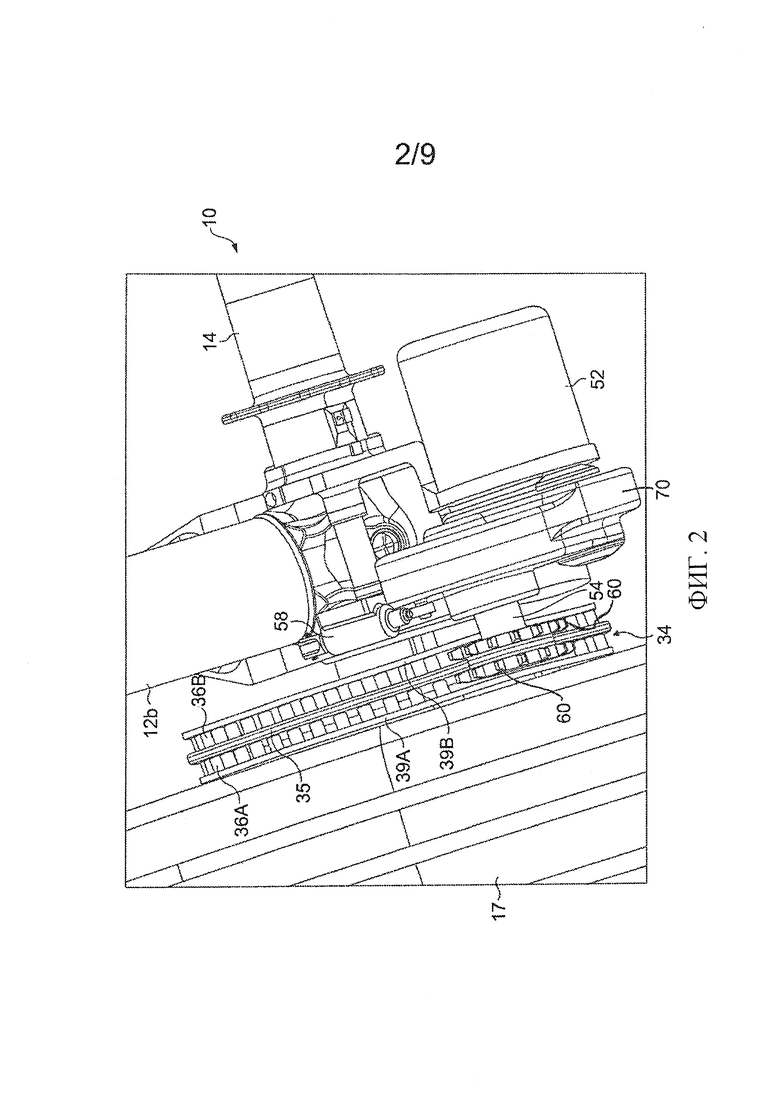
на фиг. 2 - приводная система на фиг. 1, дополнительный вид в изометрии;
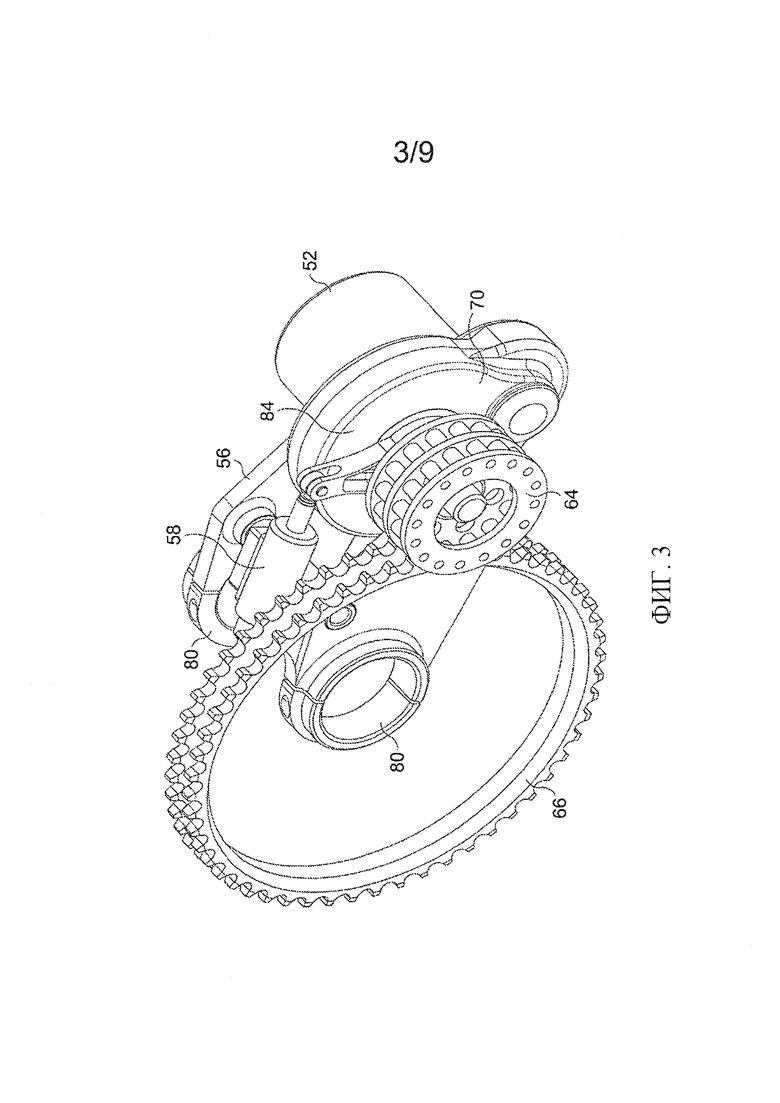
на фиг. 3 - выбранные компоненты приводной системы в соответствии со вторым вариантом осуществления изобретения, вид в изометрии;
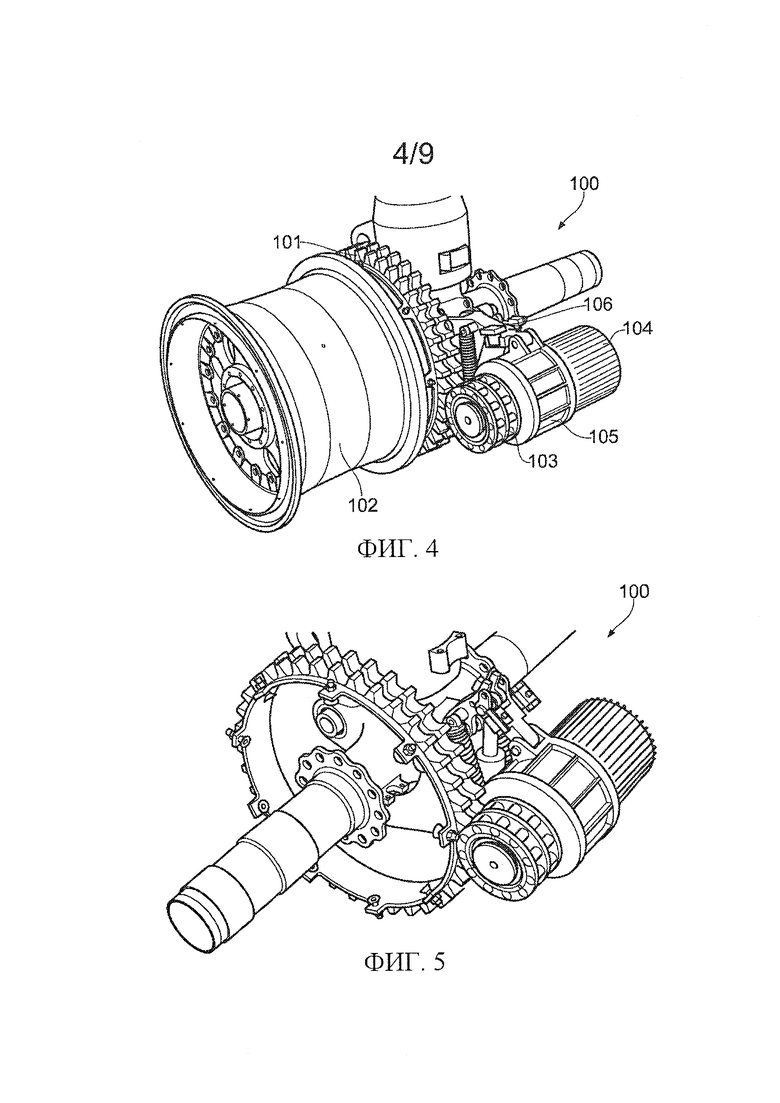
на фиг. 4 - приводная система в соответствии с третьим вариантом осуществления изобретения, вид в изометрии;
на фиг. 5 - приводная система на фиг. 4 с ведущим колесом в положении зацепления;
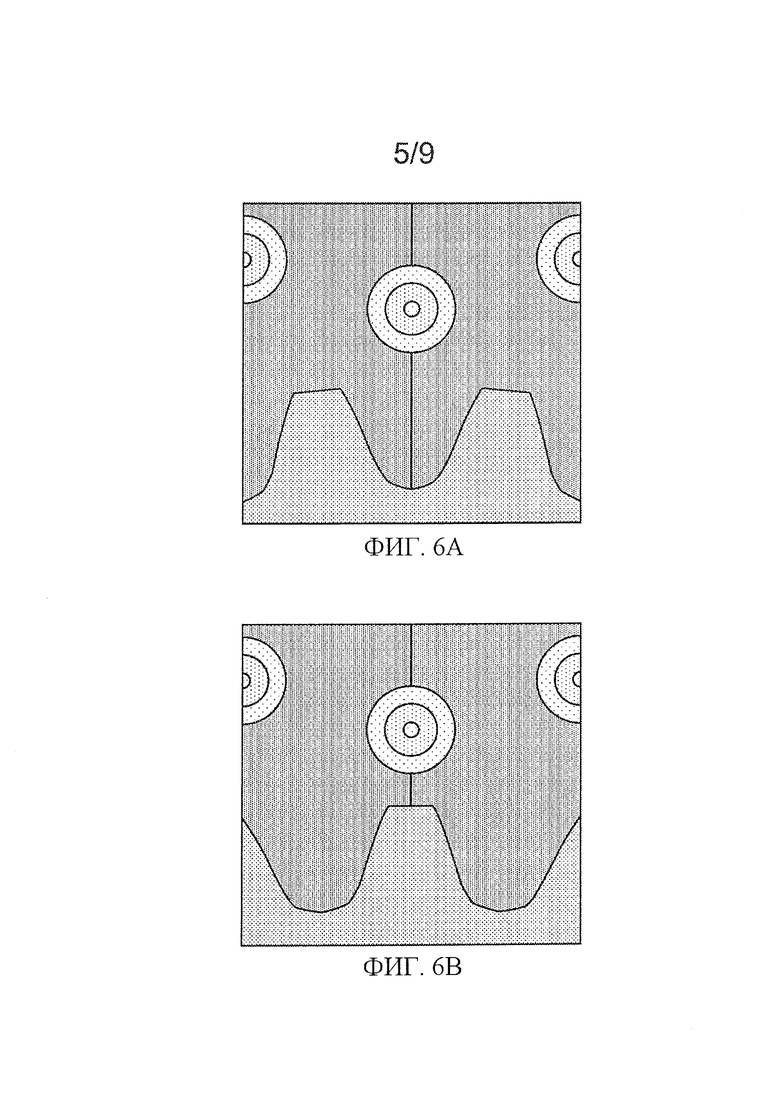
на фиг. 6а - часть ведущего колеса и ведомого передаточного механизма в нейтральном положении, когда нет зацепления, с угловым смещением 0с;
на фиг. 6b - часть ведущего колеса и ведомого передаточного механизма в нейтральном положении, когда нет зацепления, с угловым смещением 0,08 с;
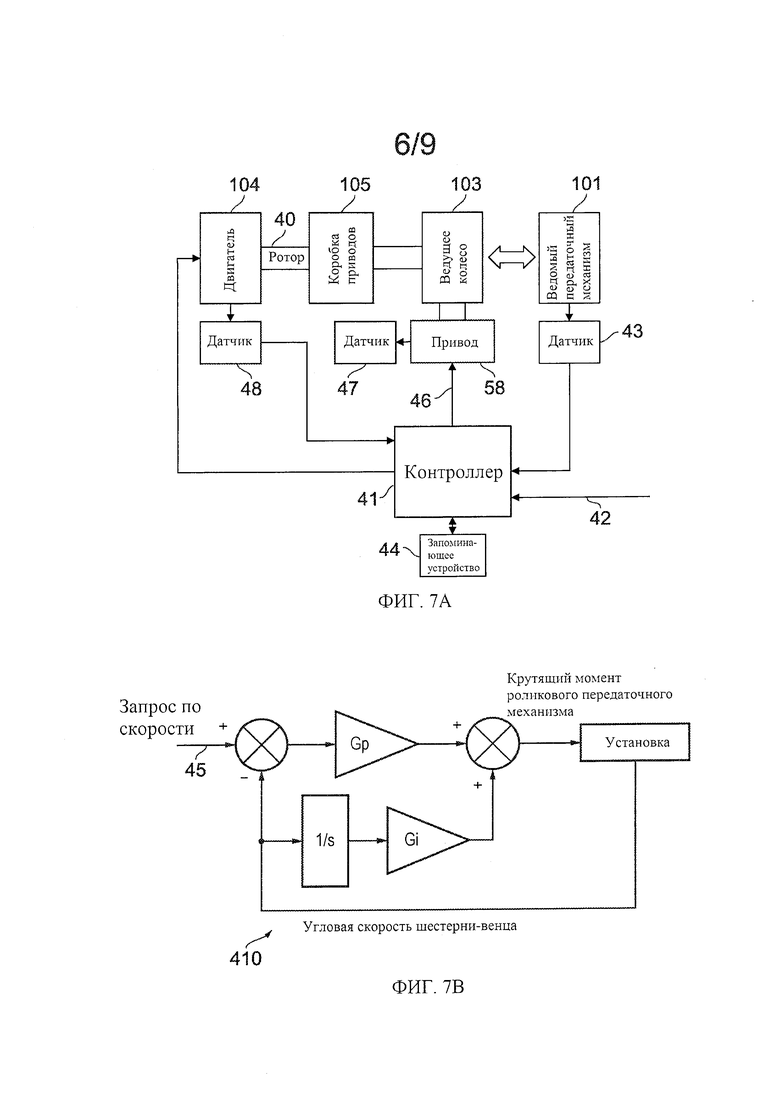
на фиг. 7а - блок-схема различных элементов приводной системы;
на фиг. 7b - регулятор пропорционально-интегрального типа (ПИ-регулятор);
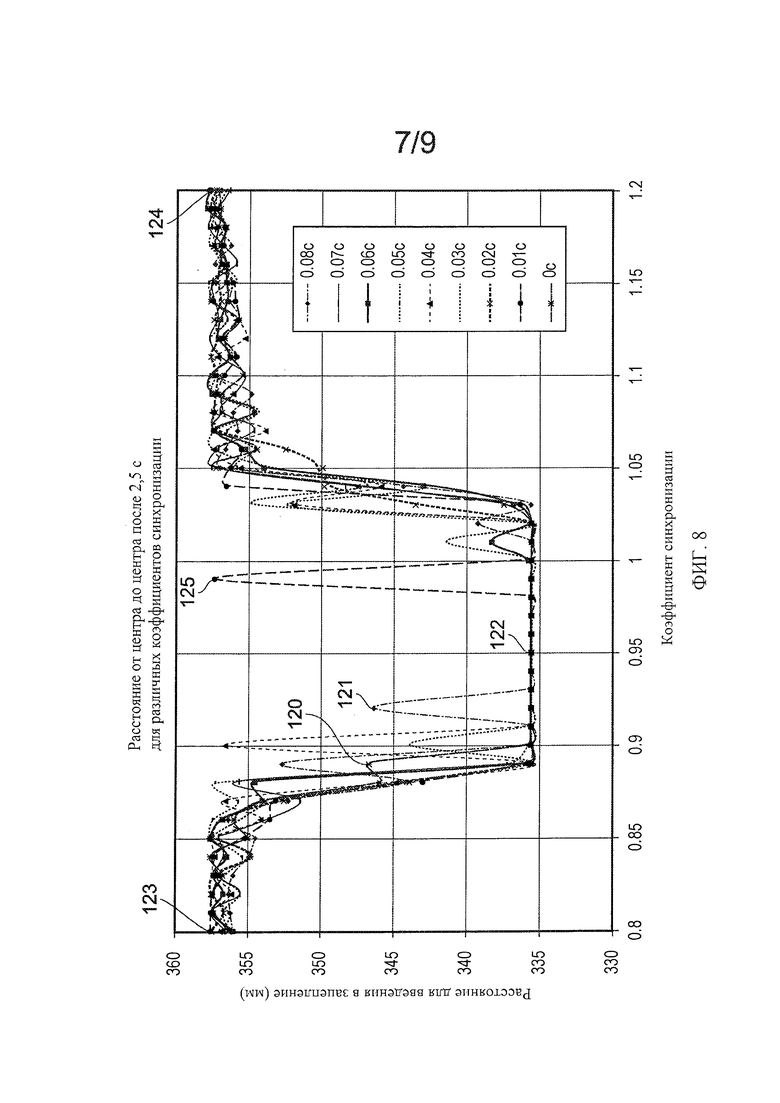
на фиг. 8 - график, показывающий расстояние от центра до центра после 2,5 с для различных коэффициентов синхронизации и угловых смещений;
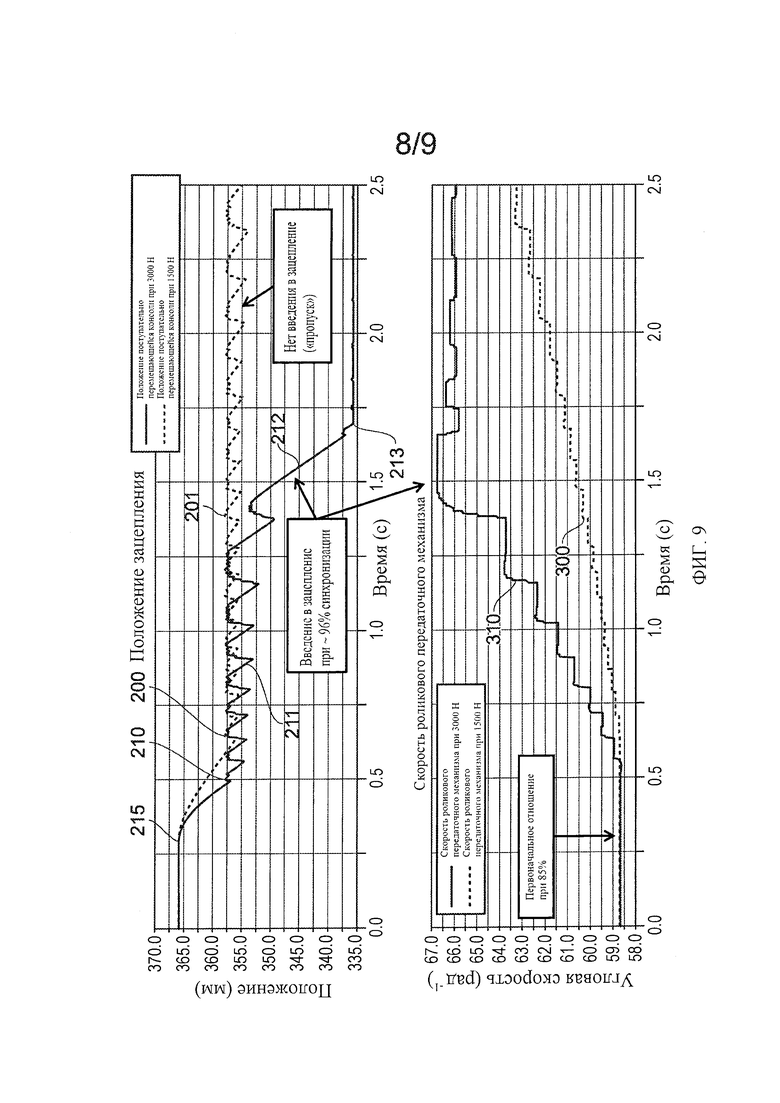
на фиг. 9 - пара графиков, сравнивающих расстояние от центра до центра и угловую скорость ведущего колеса для маленьких и больших сил для введения в зацепление;
на фиг. 10 поясняется способ управления.
Варианты осуществления изобретения
Показанные варианты согласно изобретению поясняют вариант для применения к посадочному шасси самолета, которое имеет два колеса, но принципы согласно вариантам осуществления могут быть применены к посадочному шасси с любым количеством колес, включая только единственное колесо. Варианты осуществления изобретения применяются к главному посадочному шасси (т.е. посадочному шасси, прикрепленному к конструкции крыла или конструкции фюзеляжа в области крыльев), поскольку предполагается, что вес, поддерживаемый главным посадочным шасси, должен обеспечивать наилучшую силу сцепления между колесами и грунтом, чтобы позволять надежное выруливание самолета на земле. Однако, приводная система согласно изобретению альтернативно может быть применена и к носовой стойке шасси (например, управляемое посадочное шасси в направлении носовой части самолета). Показанное главное посадочное шасси применимо для узкофюзеляжного пассажирского самолета (приблизительно 150-200 пассажиров), хотя следует принимать во внимание, что это изобретение имеет широкие пределы применимости к большому разнообразию типов и весов самолетов, включая гражданские самолеты, военные самолеты, вертолеты, пассажирские самолеты (<50 пассажиров, 100-250 пассажиров, 250-450 пассажиров, >450 пассажиров), грузовые самолеты, самолеты с поворотными винтами, и т.д.
Посадочное шасси 10 включает в себя телескопическую амортизирующую основную стойку 12, содержащую верхнюю телескопическую часть 12а (основную установочную часть) и нижнюю телескопическую часть 12b (скользящую часть). Верхняя телескопическая часть 12а прикреплена к фюзеляжу или крылу самолета (не показаны) верхним концом (не показан). Нижняя телескопическая часть 12b поддерживает ось 14, несущую на себе пару колес 16, по одному на каждой стороне основной стойки (для ясности на фиг. 1 и 2 показано только одно колесо 16). Колеса 16 расположены таким образом, чтобы вращаться вокруг оси 14 и позволять наземное перемещение самолета, такое как выруливание или приземление.
Каждое колесо 16 содержит шину 17, поддерживаемую ступицей 18, имеющей обод 18а на ее внешнем крае, который удерживает шину 17. Ведомый передаточный механизм 20 прикреплен к ступице 18 (предпочтительно, на ободе 18а), для того чтобы он мог вращаться вместе с колесом 16. Ведомый передаточный механизм 20 может быть прикреплен к колесу 16 с помощью множества отдельных соединений, которые могут обеспечивать жесткое или гибкое прикрепление. Альтернативно, крепление может быть осуществлено через фланец, образующий непрерывный расширенный обод колеса, выступающий в осевом направлении от каждого колеса 16 или ведомого передаточного механизма 20.
Приводная система 50 включает в себя двигатель 52, который передает крутящий момент к приводному валу 54 через коробку 70 приводов. Приводная система 50 поддерживается с помощью держателя 56, который жестко присоединен к оси 14 посадочного шасси. Держатель 56 включает в себя два выступа, выполненных в виде зажимов в форме полумесяца для обеспечения легкого присоединения держателя 56 к оси 14 и отсоединения от нее. Двигатель 52 присоединен неподвижно, например, с помощью болтового соединения к держателю 56. Коробка 70 приводов присоединена к держателю 56 с возможностью поворота.
Ведущее колесо 60 установлено на приводном валу 54 таким образом, чтобы оно могло вращаться с помощью приводного вала 54 вокруг приводной оси. Ведущее колесо 60, приводной вал 54 и коробка 70 приводов могут поворачиваться с помощью линейного привода (позиционера) 58, такого, например, как электромеханический линейный привод прямой передачи с роликовым ходовым винтом, который проходит между держателем 56 (на самом ближнем конце оси 15) и коробкой 70 приводов, или более точно - корпусом 84 коробки приводов. Таким образом, линейное перемещение привода 58 преобразуется во вращательное движение коробки 70 приводов и звездочек 60 вокруг оси вращения. Поэтому приводная система 50 может находиться между нейтральной конфигурацией (не показана), в которой ведущее колесо 60 не находится в зацеплении с ведомым передаточным механизмом 20, и приводной конфигурацией (показанной на фиг. 1 и 2), в которой ведущее колесо 60 находится в зацеплении с ведомым передаточным механизмом 20. В нейтральной конфигурации колесо 16 может свободно вращаться, например, во время взлета и приземления, в то время как в приводной конфигурации колесо 16 может приводиться в действие приводной системой 50, например, во время наземного выруливания.
В варианте, показанном на фиг. 1 и 2, ведомый передаточный механизм 20 выполнен в виде роликового передаточного механизма 24, а ведущее колесо 60 выполнено в виде звездочки.
Роликовый передаточный механизм образован жестким круглым кольцом 35 и рядом стержней, выступающих из обеих боковых сторон круглого кольца 35. Ролики 36а первого ряда поддерживаются с возможностью вращения стержнями, обеспеченными с одной боковой стороны круглого кольца 35, а ролики 36b второго ряда поддерживаются с возможностью вращения стержнями, обеспеченными с другой боковой стороны круглого кольца. Каждый из рядов роликов 36а и 36b проходит вокруг круглого кольца, чтобы формировать непрерывную траекторию. Первое и второе боковые круглые кольца 39а, 39b выполнены в виде сандвич-конструкции с первыми и вторыми рядами роликов 36а и 36b. Стержни, поддерживающие первый ряд роликов 36а, проходят между круглым кольцом 35 и первым боковым круглым кольцом 39а, а стержни, поддерживающие вторые ряды роликов 36b, проходят между круглым кольцом 35 и вторым боковым круглым кольцом 39b. Поэтому круглое кольцо 35 образует центральную часть для поддержки стержней, которые являются консольными по отношению к центральной части. Круглое кольцо 35 содержит множество проходящих в осевом направлении соединительных выступов (не показаны), обеспечивающих установочные средства для установки роликового передаточного механизма на ступице 18. Альтернативно, выступы могут быть заменой для круглого кольца 35.
Ведущее колесо 60 представляет собой звездочку, имеющую два соосных кольца проходящих радиально зубьев звездочки, которые могут сцепляться с роликами 36 роликового передаточного механизма. То есть, каждое кольцо зубьев звездочки расположено таким образом, чтобы зацепляться с одним из колец роликов ведомого передаточного механизма 20.
Фиг. 3 поясняет альтернативный и предпочтительный вариант осуществления изобретения, согласно которому ведомый передаточный механизм выполнен в виде звездочки вместо роликового передаточного механизма, а ведущее колесо выполнено в виде роликового передаточного механизма вместо звездочки. Таким образом, ведущее колесо представляет собой роликовый передаточный механизм 64, имеющий два соосных кольца роликов, а ведомый передаточный механизм 20 заменен звездочкой 66, имеющей два соосных кольца зубьев звездочки. Во всех других отношениях приводная система является идентичной той, которая описана выше со ссылками на фиг. 1 и 2, при этом особенности приводной системы, описываемые далее, равным образом применимы к обоим вариантам осуществления изобретения. Роликовый передаточный механизм 64 может быть сконструирован аналогично роликовому передаточному механизму 34, хотя, конечно, он имеет намного меньший диаметр и поэтому имеет меньшее количество роликов.
Преимущество конструкции звездочка-роликовый передаточный механизм состоит в том, что она в большей степени невосприимчива к деформации колеса и оси по сравнению с зацепляющимися конструкциями зубчатых передаточных механизмов. Колеса и оси посадочного шасси самолета подвергаются высоким нагрузкам и являющейся следствием этого деформации во время наземного выруливания, при этом ведомый передаточный механизм, прикрепленный к колесу, будет неизбежно деформироваться в ответ на такую деформацию. Зацепляющиеся зубчатые передаточные механизмы являются восприимчивыми к такой деформации и типичное зубчатое колесо в виде шестерни-венца может быть необходимо изолировать от колеса через подшипники, гибкое устройство сопряжения, или подобные элементы. И наоборот, конструкция звездочки и ролика согласно изобретения может быть способна допускать деформацию без такой модификации.
Такая конструкция также имеет преимущество, выражающееся в маленьком весе и в высокой структурной прочности. Главным видом неисправности роликов является разрушение в результате среза стержней; за счет установки каждого ролика непосредственно на соответствующем стержне, без промежуточной втулки, гильзы или другой детали, диаметр стержня может быть максимизирован, для того чтобы максимизировать прочность на срез.
В дополнительном варианте (не показан) ведущее колесо может альтернативно содержать единственное кольцо роликов для введения в зацепление с ведомым передаточным механизмом, выполненным в виде звездочки (не показано), имеющей единственный ряд зубьев. Роликовый передаточный механизм может иметь множество форм, включая типичный роликовый передаточный механизм, как на фиг. 3, или роликовый цепной передаточный механизм.
На фиг. 4 показано посадочное шасси 100, объединенное с приводной системой звездочка - роликовый передаточный механизм такого типа, как система, показанная на фиг. 3. Ведомая шестерня-венец 101 установлена на колесе 102. Ведущий роликовый передаточный механизм 103 приводится в действие двигателем 104 через планетарную коробку 105 передач. Привод (не показан) может перемещать передаточный механизм 103, коробку 105 передач и двигатель 104 из нейтрального положения, показанного на фиг. 4, в положение зацепления, показанное на фиг. 5. Звенья 106 замка блокируют ведущее колесо в положении зацепления, показанном на фиг. 5.
Способ введения в зацепление приводной системы, показанной на фиг. 4, с вращающимся колесом далее будет описан со ссылками на фиг. 6-10. Описываемый далее способ может быть аналогичным образом применен для систем привода, показанных на фиг. 1-3.
Фиг. 7а является блок-схемой, показывающей главные элементы приводной системы. Двигатель 104 имеет ротор 40, который приводит в действие ведущее колесо 103 через коробку 105 передач. Приводная система содержит контроллер 41, который выполнен таким образом, чтобы работать в соответствии с процессом, показанным на фиг. 10.
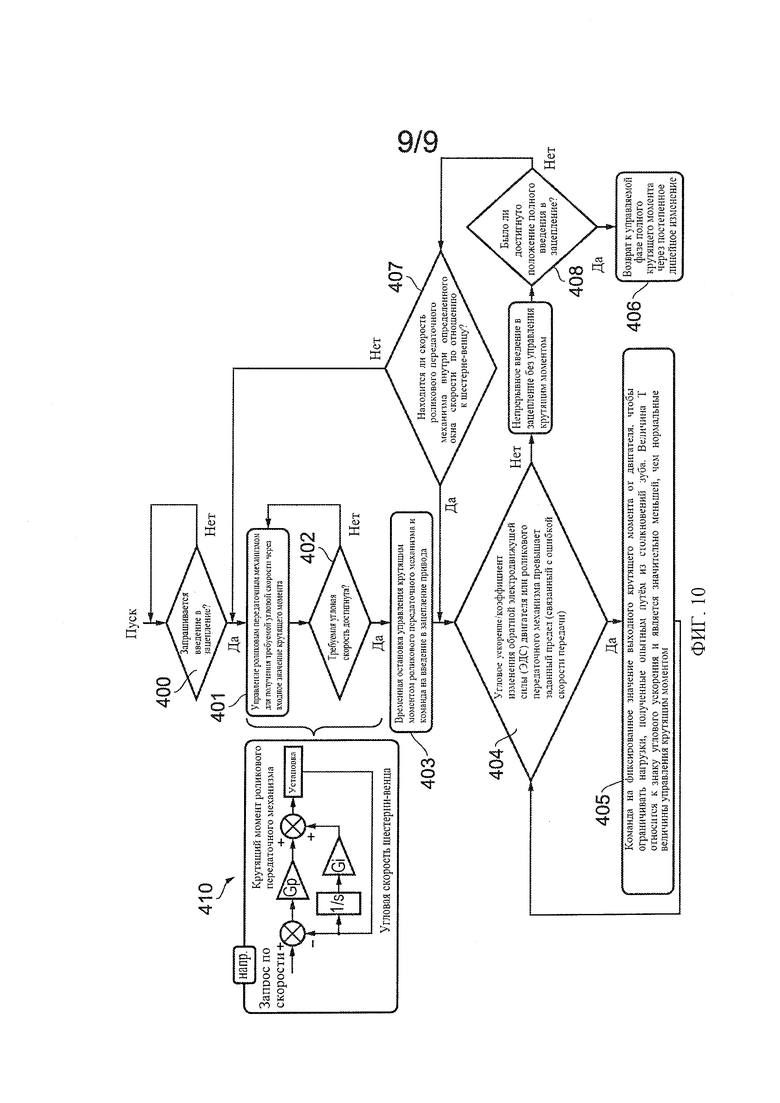
При получении запроса 42 на зацепление (например, от пилота летательного аппарата) во время этапа 400 измерения, выполняемого датчиком 43, определяют текущую угловую скорость ведомого передаточного механизма. Затем двигателю поступает команда приложить крутящий момент во время этапа 401 к ведущему колесу таким образом, чтобы ведущее колесо начало вращаться. Прикладываемый крутящий момент регулируется контуром 410 управления крутящим моментом пропорционально-интегрального (PI) регулирования, показанным на фиг. 7b, в результате чего ведущее колесо ускоряется в фазе раскручивания до требуемой угловой скорости. Требуемая угловая скорость контролируется с помощью входного запроса 45 по скорости к контуру управления от контроллера 41. Входной запрос 45 по скорости определяют контроллером 41 в соответствии с текущей угловой скоростью ведомого передаточного механизма, измеренной с помощью датчика 43, известного передаточного отношения между ведущим колесом и ведомым передаточным механизмом, и заданным коэффициентом синхронизации, сохраняемым в запоминающем устройстве 44.
Когда ведущее колесо достигает требуемой угловой скорости во время этапа 402 в конце фазы раскручивания, контроллер 41 временно приостанавливает действие контура 410 управления крутящим моментом роликового передаточного механизма и генерирует команду 46 на введение в зацепление во время этапа 403, которая вызывает инициирование фазы зацепления линейного привода 58, во время которой ведущее колесо перемещается в положение зацепления с ведомым передаточным механизмом. В первой части фазы зацепления ведущее колесо перемещается из нейтрального положения, показанного на фиг. 6а, в контактное положение, в котором оно контактирует с вращающимся ведомым передаточным механизмом во время первоначального контакта. Это время первоначального контакта является моментом времени, когда ведущее колесо создает свой первый контакт с ведомым передаточным механизмом во время фазы зацепления. После этого времени первоначального контакта, во время второй части фазы зацепления привод 58 пытается толкать ведущее колесо дальше, за пределы контактного положения в положение зацепления, где ведущее колесо полностью входит в зацепление с ведомым передаточным механизмом, при этом ролики позиционируются в направлении основания канавки между зубьями ведомого передаточного механизма. Расстояние от центра до центра между осью вращения ведущего колеса и осью вращения ведомого передаточного механизма уменьшается, когда ведущее колесо перемещается в контактное положение и в положение зацепления. Другими словами, перемещение ведущего колеса не является параллельным оси вращения, а скорее является радиальным (или по меньшей мере преимущественно радиальным) по отношению к его оси вращения.
Ведомый передаточный механизм имеет Ngear зубьев, а ведущее колесо имеет Npinion роликов, которые входят в зацепление с зубьями ведомого передаточного механизма, когда ведущее колесо находится в положении зацепления. Ngear больше, чем Npinion. Как правило, Ngear составляет 40, a Npinion=11, в результате создается передаточное отношение 40/11=3,64. Это передаточное отношение сохраняется в запоминающем устройстве 44 наряду с заданным коэффициентом синхронизации.
Ведущее колесо и ведомый передаточный механизм вращаются, соответственно, с угловыми скоростями ωpinion и ωgear, когда ведущее колесо контактирует с ведомым передаточным механизмом во время первоначального контакта. Параметр коэффициента синхронизации R=[(ωpinion*Npinion)/(ωgear*Ngear)] определяет относительную скорость роликов ведущего колеса и зубьев ведомого передаточного механизма в это время первоначального контакта. Если коэффициент R синхронизации составляет 1, тогда точка на начальной окружности ведущего колеса (т.е. центр одного из роликов) перемещается при той же самой скорости, что и точка на начальной окружности ведомого передаточного механизма (около половины пути в верхнюю часть одного из зубьев).
Коэффициент синхронизации во время первоначального контакта должен быть выбран таким образом, чтобы достигать зацепления передаточных механизмов без значительного усилия от привода 58. На фиг. 8 показан график, поясняющий эффект изменения коэффициента синхронизации. Ось X на фиг. 8 представляет заданный коэффициент синхронизации, сохраненный в запоминающем устройстве, а ось Y представляет расстояние от центра до центра между ведущим колесом и ведомым передаточным механизмом. Фиг. 8 является результатом компьютерной модели, которая моделирует поведение ведущего колеса, когда оно входит в зацепление. Компьютерная модель предполагает, что ведомый передаточный механизм вращается с угловой скоростью ωgear, ведущее колесо приводится в действие радиально в направлении ведомого передаточного механизма посредством привода с заданным усилием, при этом ведущее колесо закручивается на определенной угловой скорости, основываясь на заданном коэффициенте синхронизации. Каждая точка измерения на фиг. 8 представляет расстояние от центра до центра через 2,5 секунды после команды на введение в зацепление для данного коэффициента синхронизации и данного углового относительного положения передаточных механизмов, когда компьютерная модель начинает реализовываться. Таким образом, например, точка 120 измерения взаимодействует с прогоном компьютерной модели, который запускается при угловом относительном положении «0с», показанном на фиг. 6а (в котором ролик ведущего колеса выравнивается с канавкой между зубьями ведомого передаточного механизма) с коэффициентом синхронизации около 0. В этом случае ведущее колесо и ведомый передаточный механизм полностью не вошли в зацепление, в результате чего расстояние от центра до центра составляет около 347 мм через 2,5 с. С другой стороны, точка 121 измерения взаимодействует с прогоном компьютерной модели, который запускается при угловом относительном положении «0,08с», показанном на фиг. 6b (в котором ролик ведущего колеса выравнивается с зубом ведомого передаточного механизма) с коэффициентом синхронизации около 0,92. И снова ведущее колесо и ведомый передаточный механизм полностью не вошли в зацепление, в результате чего расстояние от центра до центра составляет около 347 мм через 2,5 с. С другой стороны, точка 122 измерения показывает последовательную операцию зацепления, основанную на коэффициенте синхронизации 0,95. В этом случае расстояние от центра до центра составляет около 336 мм, показывая, что ведущее колесо и ведомый передаточный механизм полностью вошли в зацепление.
С другой стороны, точка 123 измерения показывает безуспешную операцию зацепления, основанную на коэффициенте синхронизации 0,8. В этом случае расстояние от центра до центра составляет около 357 мм, и является более близким к расстоянию от центра до центра в нейтральном положении, показанном на фиг. 6а и 6b. Это показывает, что при таком низком значении коэффициента синхронизации ведущее колесо неоднократно отталкивалась назад вследствие серии воздействий зуба на ролик, и попытка зацепления была полностью неудачной. Аналогичным образом, точка 124 измерения показывает безуспешную операцию зацепления, основанную на высоком коэффициенте синхронизации 1,2. В этом случае соотношение от центра до центра также составляет около 357 мм, что также является более близким к расстоянию от центра до центра в нейтральном положении, показанном на фиг. 6а и 6b. Это показывает, что при таком высоком значении коэффициента синхронизации ведущее колесо неоднократно отталкивалась назад вследствие серии воздействий зуба на ролик, и попытка зацепления была полностью неудачной.
Следует отметить, что положение датчика является недоступным, поэтому угловое относительное положение между ведущим колесом и ведомым передаточным механизмом является неизвестным. Другими словами, когда ведущее колесо входит в контакт с ведомым передаточным механизмом, оно может быть совершенным образом выровнено (как показано на фиг. 6а) с положением роликов между зубьями, или может быть несостыковка (как показано на фиг. 6b) с роликами, выровненными с зубьями.
Фиг. 8 показывает, что существует «окно» оптимального коэффициента синхронизации между приблизительно 0,9 и 1, в котором ведущее колесо и ведомый передаточный механизм могут успешно войти в зацепление. Увеличение усилия, прикладываемого к приводу 58, имеет эффект расширения этого окна, но за это приходится платить увеличением нагрузки на зубья, шума и вибрации. Кроме того, увеличение инерции в кинематической цепи от ведущего колеса к двигателю будет иметь эффект сужения окна.
Как ни странно, было обнаружено, что коэффициент синхронизации, равный 1, является нежелательным, как показывает точка 125 измерения. Эта точка 125 измерения показывает прогон компьютерной модели, в котором коэффициент синхронизации приблизительно равен 1, и ведущее колесо многократно «перескакивает» зубья ведомого передаточного механизма.
Другой неожиданной особенностью, показанной на фиг. 8, является то, что коэффициент синхронизации, равный 1, находится на верхнем конце окна в большей степени, чем в его средней точке. Другими словами, фиг. 8 показывает, что идеальный коэффициент синхронизации немного меньше, чем 1, например, составляет порядка 0,95. Эта наблюдаемая асимметрия увеличивается, когда компьютерная модель изменяется для использования более высокого усилия включения, т.е. окно в дальнейшем увеличивается в левую сторону на фиг. 8 в большей степени, чем в правую сторону.
Эти два неожиданные особенности, показанные на фиг. 8, предполагают два относящихся к ним заключения. Первая особенность предполагает, что приведение в зацепление ведущего колеса и ведомого передаточного механизма при коэффициенте синхронизации, равном 1 (при котором ролики и зубья перемещаются по существу с равными скоростями) является нежелательным. Вторая особенность предполагает, что более медленное перемещение роликов по сравнению с зубьями (т.е. с коэффициентом синхронизации менее чем 1), является желательным. Следовательно, входной запрос 45 по скорости выбирается таким образам, чтобы коэффициент синхронизации [(ωpinion*Npinion)/(ωgear*Ngear)] во время первоначального контакта был меньше, чем 1.
Как отмечалось выше, когда ведущее колесо достигает требуемой угловой скорости (определяемой входным запросом 45 по скорости) в конце фазы раскручивания во время этапа 402, привод перемещает ведущее колесо в положение зацепления с ведомым передаточным механизмом в ответ на команду 46 по введению в зацепление во время этапа 403. Эта команда по введению в зацепление также используется в качестве запуска, чтобы приостанавливать управление крутящим моментом из контура 410 управления и уменьшать выходной крутящий момент двигателя 104, в идеальном случае до нуля, или по меньшей мере ниже некоторого заданного низкого уровня, сохраненного в запоминающем устройстве 44 (которое, как правило, представляет уменьшение на 90% или более, по сравнению с крутящим моментом, прикладываемым непосредственно перед приемом команды по введению в зацепление). Это инициирует фазу замедления, во время которой ротор 40 больше не прикладывает достаточного крутящего момента к ведущему колесу, в результате чего ведущее колесо будет постепенно начинать замедляться. Двигатель поддерживает крутящий момент на нуле (или ниже заданного низкого уровня) по меньшей мере до тех пор, пока ведущее колесо не достигнет контактного положения во время первоначального контакта, и возможно на более значительный срок. Ожидается, что период времени между приемом команды по введению в зацепление и временем первоначального контакта будет относительно коротким (порядка 0,5 с), в результате чего уменьшение угловой скорости ведущего колеса будет относительно маленьким. В результате, угловая скорость ведущего колеса во время первоначального контакта будет составлять (ωpinion - Δ), где Δ является незначительным уменьшением угловой скорости во время фазы замедления. Эквивалентно коэффициент синхронизации ведущего колеса во время первоначального контакта будет составлять (R - δ), где R является заданным коэффициентом синхронизации, сохраненным в запоминающем устройстве 44, а δ является незначительным уменьшением коэффициента синхронизации во время фазы замедления.
Уменьшение (или полное устранение) крутящего момента, прикладываемого двигателем во время первоначального контакта, вносит меньшее количество энергии в систему и увеличивает вероятность успешной операции по введению в зацепление.
В приведенном выше примере команда 46 по введению в зацепление для привода действует как пусковой механизм, чтобы инициировать фазу замедления. Однако в качестве пускового механизма могут использоваться другие пусковые сигналы, чтобы вызывать уменьшение выходного крутящего момента двигателя и инициировать фазу замедления. Например, датчик 47 может определять, когда расстояние от центра до центра уменьшается ниже заданного порогового значения (после команды по введению в зацепление, но перед моментом времени первоначального контакта) и контроллер использует этот сигнал датчика в качестве пускового механизма. Альтернативно, команда 46 по введению в зацепление может использоваться в качестве пускового механизма, но с фазой замедления, которая задерживается на некоторый заданный период времени, вместо того, чтобы немедленно инициироваться. Альтернативно, определение требуемой угловой скорости в конце фазы раскручивания может использоваться в качестве пускового механизма для уменьшения крутящего момента, вместо самой команды по введению в зацепление.
После времени первоначального контакта фаза замедления подходит к концу и двигатель может увеличивать крутящий момент выше низкого уровня через постепенное линейное изменение во время этапа 406 после того, как положение зацепления было достигнуто на этапе 408, или во время этапа 405 управления крутящим моментом, перед тем, как было достигнуто положение зацепления. Этот этап 405 управления крутящим моментом описывается далее.
Во время фазы измерения (т.е. после момента времени первоначального контакта, но перед тем, как ведущее колесо достигло положения зацепления) ведомый передаточный механизм контактирует с ведущим колесом через последовательные столкновения, когда каждое такое столкновение индуцирует в двигателе всплеск обратной электродвижущей силы (ЭДС), а также связанный с ним всплеск угловой скорости ротора 40. Полярность всплеска ЭДС/ угловой скорости будет зависеть от того, на какой стороне зуба происходит столкновение с роликом (т.е. столкновение может иметь эффект ускорения ролика или его замедления). Датчик 48 расположен таким образом, чтобы определять амплитуду и полярность этих всплесков, а контроллер 41 выполнен таким образом, чтобы изменять крутящий момент, прикладываемый к ведущему колесу в ответ на это определение. Датчик 48 может воспринимать электродвижущую силу (ЭДС) двигателя 104 или угловую скорость ротора 40 (например, используя резольвер). Если датчик 48 определяет положительный всплеск, показывающий, что скорость ведущего колеса увеличилась после столкновения с зубом, тогда двигателю подается команда уменьшать выходной крутящий момент на фиксированное значение. Альтернативно, если датчик 48 определяет отрицательный всплеск, показывающий, что ведущее колесо замедлилась после столкновения с зубом, тогда двигателю подается команда увеличивать выходной крутящий момент на фиксированное значение. Контур управления крутящим моментом, основанный на обнаружении этих всплесков, поясняется этапами 404 и 405 на фиг. 10.
Если на этапе 407 обнаруживается, что угловая скорость ведущего колеса вышла за пределы окна определенной скорости относительно ведомого передаточного механизма, в этом случае управление возвращается к контуру 410 управления крутящим моментом, таким образом ведущее колесо возвращается двигателем к требуемой скорости.
На фиг. 9 показана пара графиков. Верхний график имеет первую кривую, показывающую расстояние от центра до центра с течением времени для первой компьютерной модели с усилием срабатывания 1500 Н, и вторую кривую, показывающую расстояние от центра до центра с течением времени для второй компьютерной модели с усилием срабатывания 3000 Н. Первая кривая показывает первоначальный контакт в момент времени 200 первоначального контакта, за которым следуют последовательности всплесков 201, вызванных столкновениями, в которых ведущее колесо пропускает («skips») ведомый передаточный механизм (следует отметить, что эквивалентные последовательности всплесков ЭДС/ угловой скорости будут обнаруживаться на двигателе датчиком 48). В этом случае ведущее колесо никогда не достигает положения зацепления (когда расстояние от центра до центра составляет 336 мм). Вторая кривая показывает первый контакт в момент времени 210 первоначального контакта, за которым следуют последовательности всплесков 211, вызванных столкновениями во время фазы измерения, за которой следует непрерывное падение 212 расстояния от центра до центра, когда ведущее колесо перемещается к положению 213 измерения. Для обеих кривых контроллер выдает команду на введение в зацепление для привода в период времени 215 введения в зацепление.
Нижний график на фиг. 9 показывает кривые для тех же самых двух компьютерных моделей, только в этот раз отображается угловая скорость ведущего колеса. Первоначальная угловая скорость является низкой (заданный коэффициент синхронизации, сохраненный в запоминающем устройстве 44, составляет 0,85). Для первой компьютерной модели с низким усилием срабатывания кривая показывает последовательности коротких этапов 300, в которых угловая скорость увеличивается. Высокая инерция потока мощности между двигателем и ведущим колесом означает, что столкновения имеют ограниченный эффект на угловую скорость ведущего колеса. Для второй компьютерной модели с более высоким усилием срабатывания кривая показывает последовательности более длительных этапов 310, когда ведущее колесо перемещается в положение зацепления. Это показывает, что с более высокой нагрузкой введения в зацепление каждое столкновение передает большее усилие на ведущее колесо, в результате чего оно может заходить в зацепление при коэффициенте синхронизации около 0,96 (обе компьютерные модели начинаются при заданном коэффициенте синхронизации, равном 0,85). Очевидно, что каждое столкновение является субоптимальным, и увеличение усилия увеличивает удар, нагрузки и шум.
Описанные выше варианты осуществления изобретения подходят только для операций наземного выруливания, но могут быть изменены (например, с помощью регулирования передаточного отношения коробки приводов), для того чтобы они были применимы только для операций раскручивания перед приземлением. В конфигурации с операциями наземного выруливания линейный привод 58 (который может приводиться в действие в обратном направлении) может быть с управлением по крутящему моменту (или с управлением по току), чтобы прикладывать, по существу, постоянную нагрузку между ведущим колесом и ведомым передаточным механизмом, таким образом учитывая некоторую деформацию различных компонентных частей приводной системы, в то же самое время предотвращая нежелательное разделение. Электромеханический тормоз (не показан) или другое аналогичное блокирующее устройство может быть встроено в привод 58, чтобы блокировать привод в разъединенной (второй) конфигурации.
В каждой из описанных выше конструкций принцип достижения привода с помощью зацепления между звездочкой и роликовым передаточным механизмом/ роликовой цепью может применяться в том случае, когда ведомый передаточный механизм выполнен в виде звездочки, а ведущее колесо выполнено в виде роликового передаточного механизма/ роликовой цепи и наоборот.
Хотя фигурами поясняются только особенности приводной системы для приведения в действие одного из колес, рассматривается, что эти особенности могут быть отражены для другого колеса. То есть рассматривается, что одна приводная система может быть обеспечена для каждого колеса. Для посадочного шасси с четырьмя или более колесами приводная система может быть обеспечена для каждого из колес, или только для двух из них. В тех вариантах осуществления, в которых только два из всех колес обеспечены приводными системами, может быть необходимо обеспечивать дополнительные двигатели (не показаны), чтобы достигать нужной степени раскручивания перед приземлением колес, не обеспеченных приводом, при этом наземное выруливание выполняется двумя приводными системами. В других вариантах осуществления изобретения может быть возможным иметь один двигатель, который совместно используется двумя приводными системами. То есть, двигатель может располагаться таким образом, чтобы вращать входной вал коробки приводов каждой приводной системы.
Хотя на фигурах показана только приводная система 50, поддерживаемая держателем 56, который жестко присоединен к оси 14 посадочного шасси, приводная система 50 альтернативно может быть установлена на верхней телескопической части 12а (основной установочной части) или нижней телескопической части 12b (скользящей части).
Хотя изобретение описано со ссылками на один или более предпочтительных вариантов осуществления изобретения, предполагается, что могут быть произведены различные изменения или модификации без выхода за пределы объема изобретения, как определено в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНАЯ СИСТЕМА ШАССИ | 2013 |
|
RU2643857C2 |
| ПРИВОДНАЯ СИСТЕМА ШАССИ (ВАРИАНТЫ) | 2013 |
|
RU2643114C2 |
| ЦЕВОЧНАЯ ШЕСТЕРНЯ ДЛЯ СИСТЕМЫ ПРИВОДА | 2015 |
|
RU2680301C2 |
| Механизм передачи крутящего момента агрегатам турбореактивного двигателя (ТРД), центральная коническая передача (ЦКП) ТРД, главная коническая шестерённая пара ЦКП ТРД, корпус ЦКП ТРД, ведущее зубчатое коническое колесо ЦКП, ведомое зубчатое коническое колесо ЦКП, узел ЦКП ТРД | 2016 |
|
RU2636626C1 |
| КОЛЕСНЫЙ УЗЕЛ С ШЕСТЕРНЕЙ | 2015 |
|
RU2672152C2 |
| Коробка двигательных агрегатов (КДА) турбореактивного двигателя (ТРД), корпус КДА, главная коническая передача (ГКП) КДА, ведущее колесо ГКП КДА, ведомое колесо ГКП КДА, входной вал КДА | 2016 |
|
RU2635125C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2021 |
|
RU2836068C1 |
| СИСТЕМА ПРИВОДА ШАССИ | 2015 |
|
RU2694988C2 |
| МАТРИЧНО-ЗУБЧАТАЯ ВАРИАТИВНАЯ КОРОБКА ПЕРЕДАЧ | 2022 |
|
RU2803217C1 |
| ШЕСТЕРЕННЫЙ ВАРИАТОР | 2007 |
|
RU2342574C2 |
Изобретение относится к способу введения в зацепления приводной системы с вращающимся колесом посадочного шасси летательного аппарата. С помощью двигателя к ведущему колесу прикладывают крутящий момент. Команда на введение в зацепление выдается приводу в определенный момент времени. В ответ на команду привод перемещает ведущее колесо из нейтрального положения в контактное положение. При этом вращающийся ведомый передаточный механизм устанавливают на вращающееся колесо посадочного шасси летательного аппарата. Затем приводится в действие привод для дополнительного перемещения ведущего колеса в положение зацепления. Расстояние от центра до центра между ведущим колесом и ведомым передаточным механизмом уменьшается, когда ведущее колесо перемещается в контактное положение и в положение зацепления. С помощью двигателя уменьшают крутящий момент до более низкого заданного уровня в момент времени зацепления или после него и поддерживают крутящий момент ниже заданного уровня во время фазы замедления вращения до момента времени первоначального контакта. После первоначального контакта крутящий момент увеличивают выше заданного уровня. Уменьшается износ шин при приземлении. 2 н. и 12 з.п. ф-лы, 12 ил.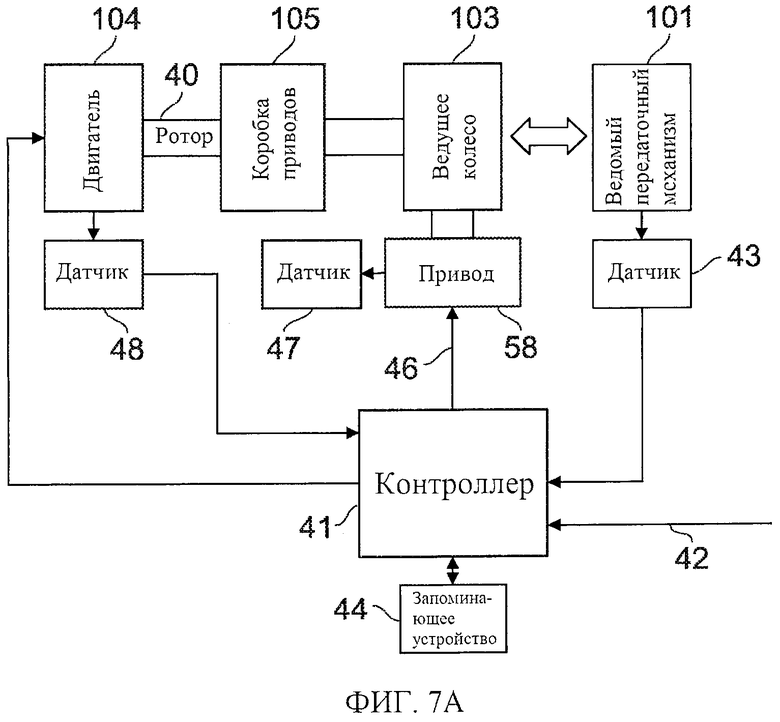
1. Способ введения в зацепление приводной системы с вращающимся колесом посадочного шасси летательного аппарата, включающий в себя этапы, на которых управляют двигателем для прикладывания крутящего момента к ведущему колесу, в результате чего ведущее колесо вращается; выдают команду на введение в зацепление приводу в момент времени введения в зацепление; приводят в действие привод в ответ на команду введения в зацепление для перемещения ведущего колеса из нейтрального положения в контактное положение, в котором оно контактирует с вращающимся ведомым передаточным механизмом во время первоначального контакта, при этом вращающийся ведомый передаточный механизм устанавливают таким образом, чтобы вращать колесо посадочного шасси летательного аппарата; затем после момента времени первоначального контакта приводят в действие привод для дополнительного перемещения ведущего колеса в положение зацепления, в котором ведущее колесо входит в зацепление с ведомым передаточным механизмом, причем расстояние от центра до центра между ведущим колесом и ведомым передаточным механизмом уменьшается, когда ведущее колесо перемещается в контактное положение и в положение зацепления, при этом способ дополнительно содержит этап, на котором управляют двигателем для уменьшения крутящего момента до более низкого заданного уровня в момент времени зацепления или после него, а также для того, чтобы поддерживать крутящий момент ниже заданного уровня до тех пор, пока не наступит время первоначального контакта, затем после момента времени первоначального контакта увеличивать крутящий момент выше заданного уровня.
2. Способ по п. 1, содержащий этап, на котором управляют двигателем для уменьшения крутящего момента, по существу, до нуля в момент времени зацепления или после него, поддерживают крутящий момент, по существу на нулевом значении до момента времени первоначального контакта, затем, после момента времени первоначального контакта, увеличивают крутящий момент выше, по существу, нулевого уровня.
3. Способ по п. 1 или 2, в котором ведущее колесо или ведомый передаточный механизм является роликовым передаточным механизмом (с роликами, которые входят в зацепление с зубьями, соответственно, ведомого передаточного механизма или ведущего колеса).
4. Способ по любому из пп. 1-3, содержащий этап, на котором увеличивают крутящий момент выше заданного уровня после того, как ведущее колесо перемещается в положение зацепления.
5. Способ по любому из пп. 1-4, содержащий этап, на котором увеличивают крутящий момент выше заданного уровня перед тем, как ведущее колесо перемещается в положение зацепления.
6. Способ по любому из пп. 1-5, в котором ведомый передаточный механизм имеет Ngear зубьев или роликов, ведущее колесо имеет Npinion зубьев или роликов, которые входят в зацепление с зубьями или роликами ведомого передаточного механизма, когда ведущее колесо находится в положении зацепления, ведущее колесо и ведомый передаточный механизм вращаются, соответственно, с угловыми скоростями ωpinion и ωgear в момент времени первоначального контакта, а коэффициент синхронизации [(ωpinion*Npinion)/(ωgear*Ngear)] в момент времени первоначального контакта не равен 1.
7. Способ по п. 6, в котором коэффициент синхронизации [(ωpinion*Npinion)/(ωgear*Ngear)] в момент времени первоначального контакта меньше чем 1.
8. Способ по п. 7, в котором коэффициент синхронизации [(ωpinion*Npinion)/(ωgear*Ngear)] в момент времени первоначального контакта меньше чем 0,98.
9. Способ по п. 8, в котором коэффициент синхронизации [(ωpinion*Npinion)/(ωgear*Ngear)] в момент времени первоначального контакта меньше чем 0,96.
10. Способ по п. 6, в котором коэффициент синхронизации [(ωpinion*Npinion)/(ωgear*Ngear)] в момент времени первоначального контакта меньше чем 0,98, или больше чем 1,02.
11. Способ по любому из пп. 1-10, в котором ведомый передаточный механизм контактирует с ведущим колесом в серии соударений, когда ведущее колесо перемещается из контактного положения в положение зацепления, при этом каждое такое соударение индуцирует в двигателе всплеск электродвижущей силы (ЭДС) или угловой скорости, причем способ дополнительно содержит этап, на котором управляют двигателем таким образом, чтобы увеличивать крутящий момент выше заданного уровня после момента времени первоначального контакта в ответ на обнаружение одного из всплесков.
12. Приводная система для вращения колеса посадочного шасси летательного аппарата, включающая в себя ведущее колесо; ведомый передаточный механизм, приспособленный для установки в колесо посадочного шасси летательного аппарата; двигатель, расположенный таким образом, чтобы прикладывать крутящий момент к ведущему колесу, в результате чего это ведущее колесо вращается; привод, который отвечает на команду на введение в зацепление в момент времени для введения в зацепление, чтобы перемещать ведущее колесо из нейтрального положения в контактное положение, в котором оно контактирует с ведомым передаточным механизмом в момент времени первоначального контакта; затем после времени первоначального контакта ведущее колесо перемещается дополнительно в положение зацепления, в котором ведущее колесо входит в зацепление с ведомым передаточным механизмом, при этом расстояние от центра до центра между ведущим колесом и ведомым передаточным механизмом уменьшается, когда ведущее колесо перемещается в контактное положение и в положение зацепления, причем приводная система дополнительно содержит контроллер, который выполнен таким образом, чтобы управлять двигателем для уменьшения крутящего момента ниже заданного уровня в момент времени зацепления или после него, поддержания крутящего момента ниже заданного уровня до момента времени первоначального контакта, затем увеличения крутящего момента выше заданного уровня после момента времени первоначального контакта.
13. Приводная система по п. 12, поддерживаемая с помощью держателя, который жестко присоединен к оси, основной установочной части или скользящей части посадочного шасси.
14. Приводная система по п. 13, в которой держатель включает в себя два выступа, выполненных в виде зажимов в форме полумесяца для обеспечения легкого присоединения и отсоединения держателя.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 2009 |
|
RU2395428C1 |
| УСТРОЙСТВО ДЛЯ РАСКРУТКИ КОЛЕСА ШАССИ САМОЛЕТА ПРИ ПОЛЕТЕ ПЕРЕД ПРИЗЕМЛЕНИЕМ | 2008 |
|
RU2384467C2 |

