Изобретение относится к позиционирующему устройству с опорной структурой, содержащему приспособление для крепления обрабатываемой детали и регулируемые по длине опорные стойки, соединенные с одной стороны с опорной структурой, а с другой с приспособлением для крепления обрабатываемой детали, причем опорные стойки в местах соединения с опорной структурой и с приспособлением для крепления обрабатываемой детали установлены подвижно, при этом по меньшей мере одна часть опорных стоек выполнена регулируемой по длине и по меньшей мере часть опорных стоек имеет привод для регулирования по длине.
Из уровня техники известны различные позиционирующие устройства такого рода, находящие применение в различных отраслях техники. Известные позиционирующие устройства служат для удержания объекта в определенном положении. Такие позиционирующие устройства применяются, например, для позиционирования обрабатываемой детали относительно инструмента с тем, чтобы деталь можно было обрабатывать с помощью этого инструмента. В автомобильной промышленности деталь кузова автомашины, например, на станции техобслуживания или в каком-либо ином аналогичном месте обычно позиционируется с помощью нескольких позиционирующих устройств. После этого закрепленный таким образом кузов может обрабатываться, например, с помощью сварочных роботов.
В US 5787758 описывается, например, трехосное позиционирующее устройство, служащее для позиционирования объектов, как например, деталей, инструмента, датчиков, оптических поверхностей и т.п. Известное позиционирующее устройство содержит опорную структуру, соединяющую исполнительные элементы с регулируемой частью станка. Часть станка зажимает объект и благодаря управлению исполнительными элементами может перемещаться и позиционироваться относительно опорной структуры. Однако часть станка может перемещаться только в направлении осей своей декартовой системы координат, причем начало координат этой системы жестко связано с частью станка. Откидывание, повороты или вращение части станка относительно этих осей должны быть исключены. Для этого известное позиционирующее устройство имеет три опорные стойки, которые, с одной стороны, шарнирно соединены с опорной структурой, а с другой стороны, с частью станка. При этом опорные стойки соединены указанными деталями и выполнены таким образом, чтобы они препятствовали повороту части станка относительно этих осей. Опорные стойки включают два участка, соединенные с возможностью складывания относительно друг друга, так что длина опорной стойки может регулироваться или изменяться путем складывания и раскладывания.
Такие позиционирующие устройства имеют, в частности, тот недостаток, что они занимают много места. Это, в частности, вызывает проблемы при установке позиционирующего устройства на поточной линии и т.п., поскольку здесь постоянно остается мало места между роботами, ленточными конвейерами, конструктивными элементами и т.д. Известные позиционирующие устройства не обладают также достаточной жесткостью для противостояния временами очень большим нагрузкам. Кроме того, дорогостоящей оказывается сборка известных позиционирующих устройств.
Задачей изобретения является создание небольшого компактного позиционирующего устройства с большой жесткостью.
Эта задача решается с помощью позиционирующего устройства с опорной структурой, содержащего приспособление для крепления обрабатываемой детали и регулируемые по длине (в продольном направлении) опорные стойки с признаками, указанными в п.1 формулы изобретения.
В соответствии с этим позиционирующее устройство вышеуказанного типа согласно изобретению отличается тем, что по меньшей мере шесть его опорных стоек установлены попарно, что в одной паре опорные стойки установлены параллельно, что каждая пара на одном первом конце продольной протяженности опорных стоек имеет поворотный подшипник, а на втором конце продольной протяженности каждой опорной стойки - второй подшипник.
Таким образом, согласно изобретению обеспечивается такое положение, что, хотя каждая опорная стойка и воспринимает усилия индивидуально, каждая пара опорных стоек все же, если ее рассматривать как пару сил, может также воспринимать момент. В результате средняя нагрузка на опорные стойки уменьшается. К тому же параллельное расположение опорных стоек в парах при специальном выполнении поворотного подшипника на одном конце в продольном направлении опорных стоек придает целесообразную жесткость всей конструкции. Другое преимущество такого расположения опорных стоек усматривается в том, что позиционирующее устройство выполнено сравнительно компактным относительно сил и моментов, действию которых он может подвергаться.
В предпочтительной форме выполнения предмета изобретения, изложенного в заявке, количество опорных стоек в точности равно шести.
Тем самым позиционирующее устройство имеет ровно три пары регулируемых по длине опорных стоек, которые при соответствующем пространственном расположении на опорной структуре передают действие сил и моментов со стороны обрабатываемой детали на опорную структуру особенно благоприятным образом.
Согласно изобретению предусмотрено также, чтобы каждая пара опорных стоек имела общий привод.
Таким образом, позиционирующее устройство, в целом, становится еще более компактным, а затраты на управление приводами становятся, соответственно, меньшими.
Кроме того, предпочтительно, чтобы привод соединялся с соответствующей парой опорных стоек равноугольно, в частности с помощью ремня, зубчатого ремня, механизма передачи или зубчатых колес.
Другие предпочтительные формы выполнения изобретения позиционирующего устройства согласно изобретению раскрываются в других зависимых пунктах формулы изобретения.
Более подробно предпочтительные формы выполнения и усовершенствованные варианты осуществления изобретения, а также их особые преимущества поясняются и описываются на примерах осуществления изобретения, представленных на чертежах, где
на фиг.1 показана базовая схема опорной пары изменяемой длины,
на фиг.2 показана первая схема для сочленения опорной пары,
на фиг.3 показан вид первого варианта выполнения позиционирующего устройства, в перспективе,
на фиг.4 показан вид сверху варианта выполнения позиционирующего устройства,
на фиг.5 показана подробно опорная ножка пары опорных стоек позиционирующего устройства,
на фиг.6 показан второй детальный вид опорной ножки опорных стоек с частичным разрезом,
на фиг.7 показана принципиальная схема привода с зубчатым ремнем для опорной пары,
на фиг.8 показан детальный вид головок опорных стоек опорной пары,
на фиг.9 показан первый пример положения позиционирующего устройства,
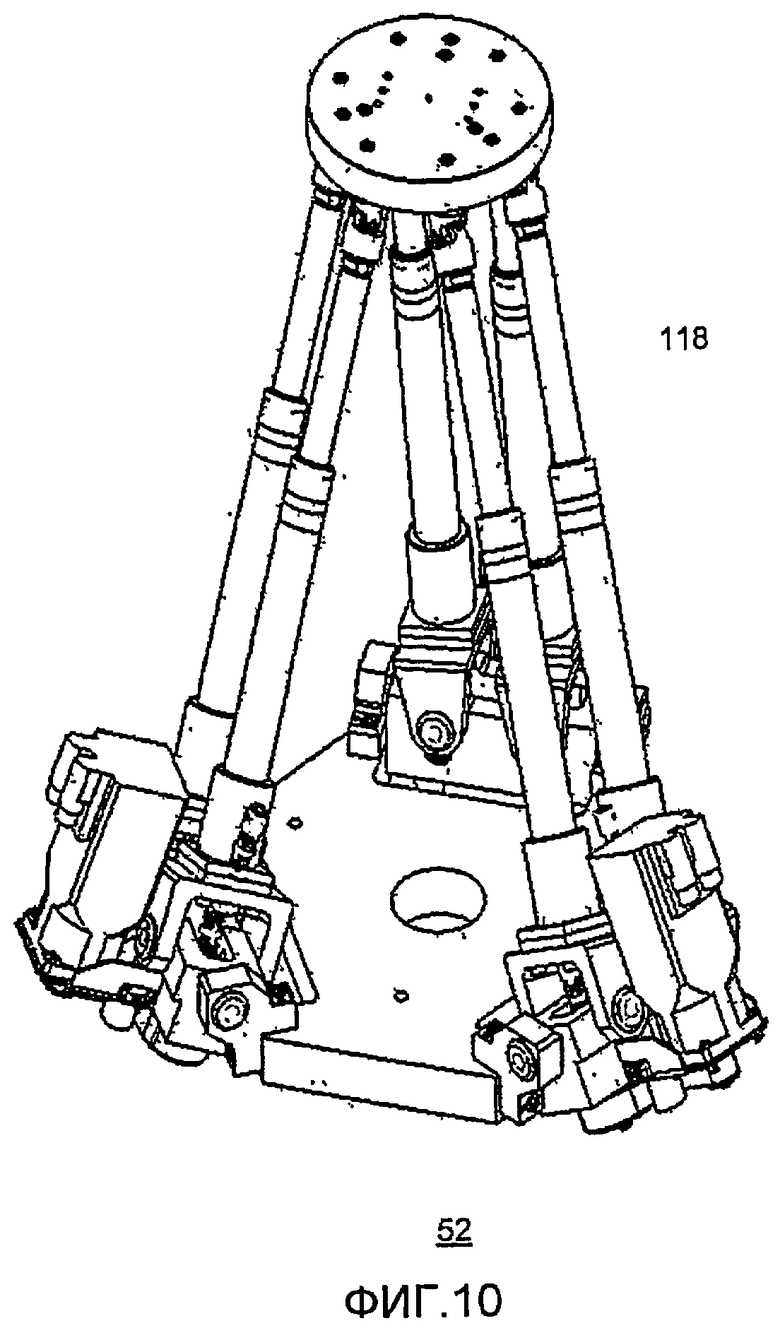
на фиг.10 показан второй пример положения позиционирующего устройства,
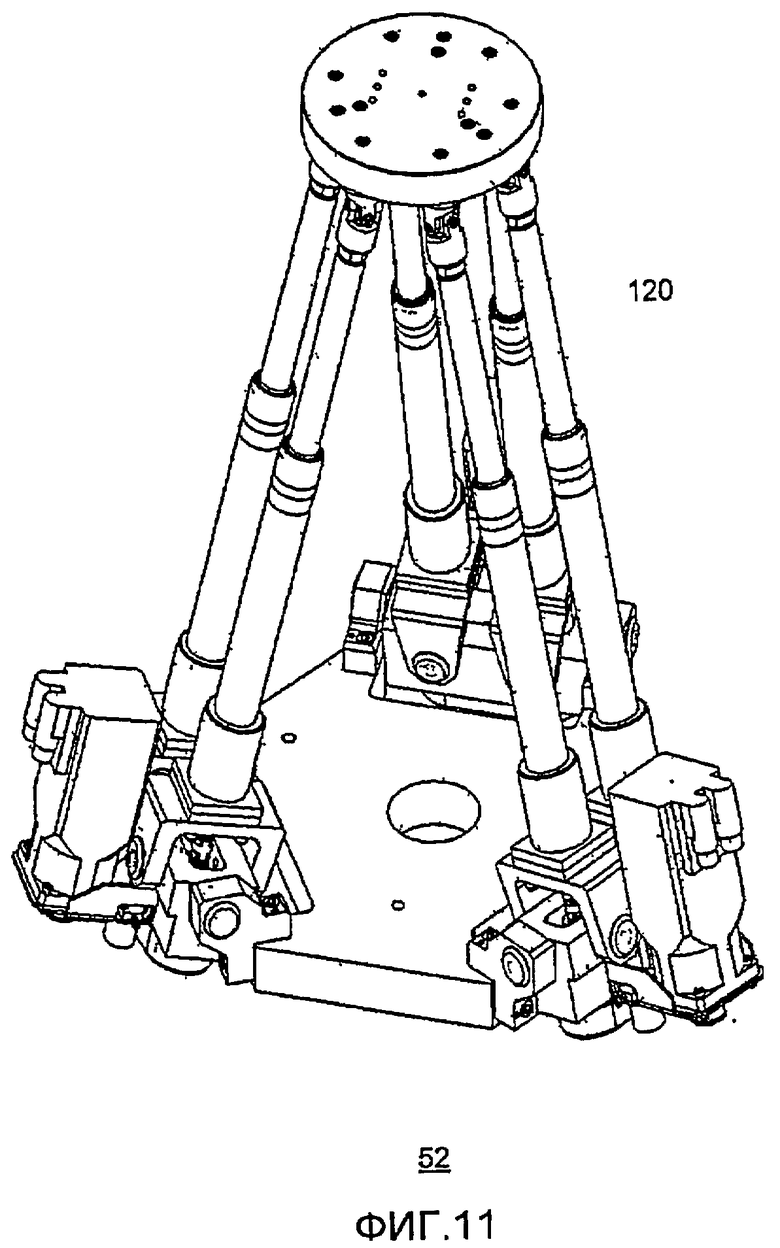
на фиг.11 показан третий пример положения позиционирующего устройства, а также
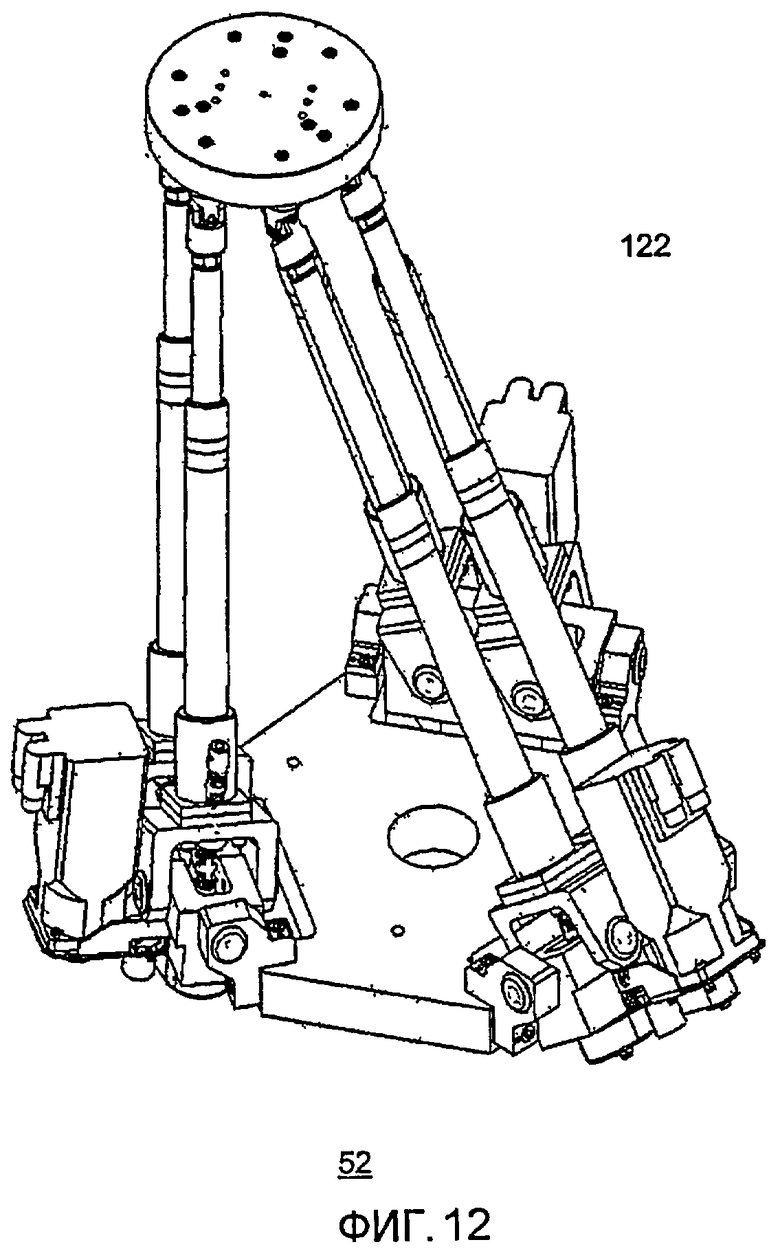
на фиг.12 показан четвертый пример положения позиционирующего устройства,
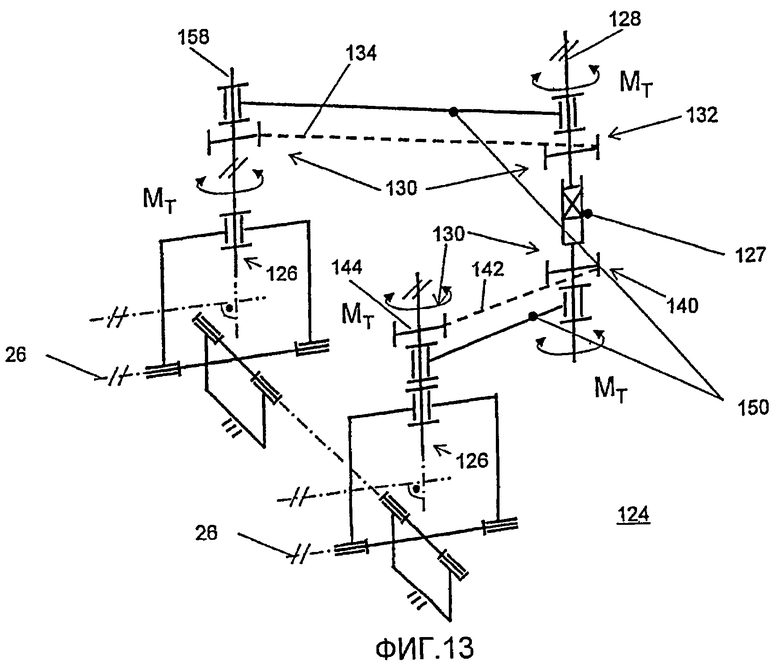
на фиг.13 показана вторая схема сочленения опорной пары,
на фиг.14 показана третья схема сочленения опорной пары,
на фиг.15 показан второй пример общего привода опорной пары,
на фиг.16 показан детальный вид второго примера с опорной парой,
на фиг.17 показан первый пример расположения пары опорных стоек с отдельными тормозами,
на фиг.18 показан второй пример расположения пары опорных стоек с отдельными тормозами, а также
на фиг.19 показан третий пример расположения пары опорных стоек с отдельными тормозами.
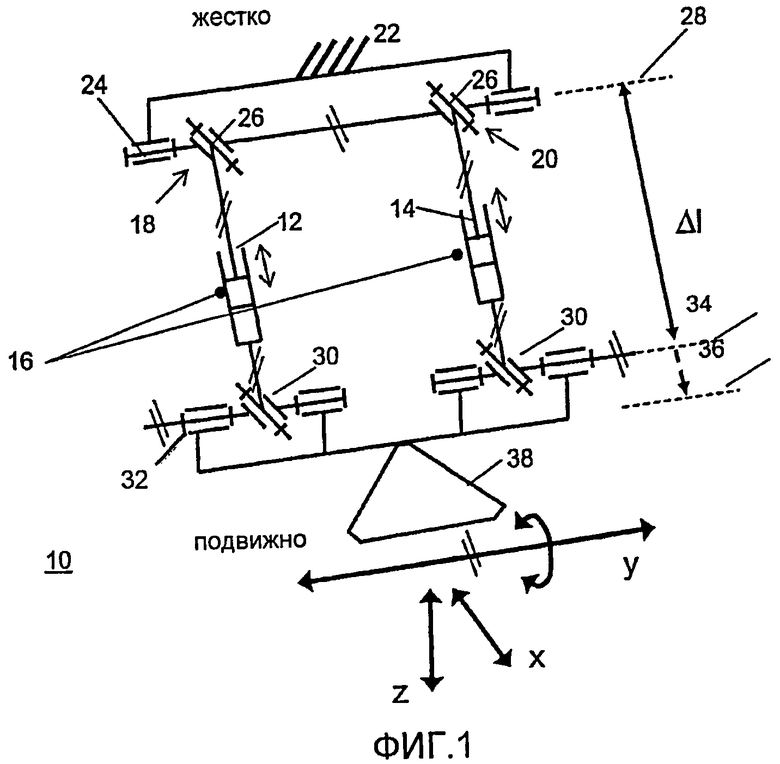
На фиг.1 показана базовая схема 10 опорной пары позиционирующего устройства согласно изобретению, в котором первая опорная стойка 12 и вторая опорная стойка 14 установлены параллельно и с конструкционно-заданным интервалом. Обе опорные стойки 12, 14 выполнены с возможностью регулирования по длине (в продольном направлении), что показано на первой схеме 10 посредством цилиндропоршневой системы 16. При этом здесь возможны различные виды привода, например гидравлический, пневматический или электрический, однако возможно также механическое регулирование длины, которое в этом случае опять же осуществляется посредством пневматического, гидравлического или электрического привода. В порядке дополнения в случае выхода из строя привода возможно также установка длины вручную, например с помощью рукоятки.
Опорные стойки 12, 14 жестко соединены с опорной структурой 22 первым концом своей длины, на фиг.1 показанным верхним, посредством первого 18, а также второго карданного шарнира 20. При этом каждый карданный шарнир 18, 20 имеет, соответственно, первый 24 и второй поворотный подшипник 26. При этом соответственно первые поворотные подшипники 24 жестко соединены с опорной структурой 22 и выдерживают между собой постоянный интервал, обусловленный конструкцией. Кроме того, первые поворотные подшипники 24 установлены таким образом, что они имеют одну общую поворотную ось 28. На втором конце своей длины опорные стойки 12, 14 имеют, соответственно, третий поворотный подшипник 30, причем эти третьи поворотные подшипники 30 вместе установлены на четвертом поворотном подшипнике 32. Тем самым согласно изобретению добиваются того, чтобы и третьи подшипники 30 выдерживали между собой интервал, заданный конструкцией, и к тому же вместе поворачивались на второй поворотной оси 34. Вторая поворотная ось 34 удалена от поворотной оси 28 на заданное расстояние, благодаря чему устанавливается необходимая длина пар опорных стоек. Общий поворотный подшипник 32 с поворотной осью 34 в свою очередь жестко соединен с подвижной платформой 38, используемой в качестве приспособления для крепления обрабатываемой детали. При таком соединении платформа 38 приобретает относительно неподвижной опорной структуры 22 подвижность, обозначенную на фиг.1 стрелками. При этом в зависимости от положения и ориентации платформы расстояние между поворотными осями 28 и 34 может изменяться, например ось 34 может удлиняться до положения оси 36.
С помощью схемы расположения нижних подшипникового узла опорных стоек 12, 14, подробно описанного выше, в целом, для подшипникового узла достигаются степени свободы, обозначенные направлениями стрелок на фигуре с буквами X, Y, а также Z.
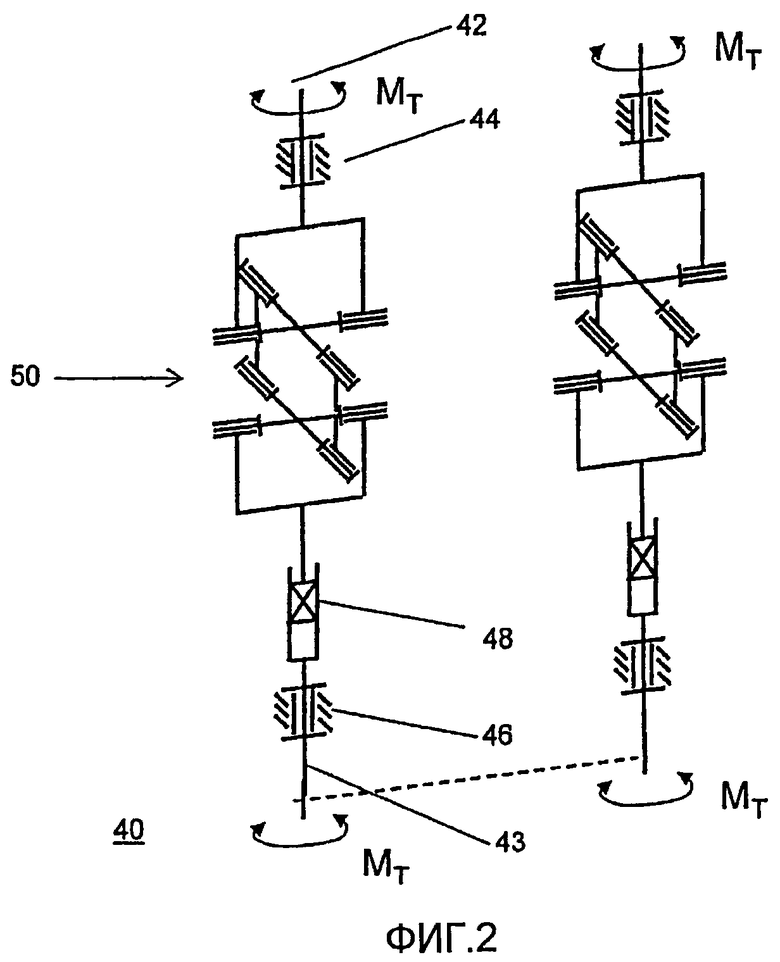
Для общего и синхронного в продольном направлении механического приведение в действие пар опорных стоек согласно изобретению возможны три варианта осуществления. На фиг.2 показана первая схема 40 кинематического соединения пары опорных стоек, которое с помощью шарнирной системы определенным образом передает паре опорных стоек приводную мощность двигателя. В позиционирующем устройстве согласно изобретению благодаря этой шарнирной системе приводная мощность двигателя может передаваться без перекоса или заклинивания независимо от положения и ориентации поворачиваемой пары опорных стоек. Любой из валов 42 и 43 может применяться как с приводной стороны, так и с ведомой стороны. Если, например, вал 42 применяется с ведомой стороны, то его следует устанавливать параллельно соответствующей оси 12 или 14 согласно фиг.1. Используемый с ведомой стороны вал 43 отключается посредством описанной шарнирной системы от позиционирования и ориентирования опорной стойки и посредством подшипника 46 вращения может переключиться на опорную структуру 22 или на тело оси поворотного подшипника 24. Согласно изобретению для приведения в действие пары опорных стоек нужны две шарнирные системы 40. Благодаря этому становится возможным распределение приводной мощности, необходимой для установки опорных стоек, от одного привода на обе опорной стойки. При этом неважно, на каком конце опорных стоек установлены соответствующие подшипники. На фиг.1 шарнирные комбинации 30, 32 и отдельные шарниры карданных шарниров 18, 20 могут меняться местами и взаимозаменяться. Так, например, оба шарнира 30, 32 могут быть также установлены на верхнем конце опорных стоек 12, 14. Для передачи приводной мощности на пару опорных стоек шарнирная система 40 может быть отнесена соответственно к шарнирам со стороны платформы или шарнирам опорной структуры. Между первым 44 и вторым подшипником 46 вращения на первой оси 42 вращения установлен без возможности проворачивания элемент 48 компенсации длины, а также третий карданный шарнир 50. Таким образом, с помощью особенно удобных технических средств реализуется функция общего и синхронного в продольном направлении, механического приведения в действие пар опорных стоек со стандартными техническими элементами. Возможно, чтобы усилие на двух подшипниках 44 или 46 вращения компенсировалась одним общим корпусом.
На фиг.3 показано в перспективе первое позиционирующее устройство 52. Базовая плита 54 соединена с помощью соединительных элементов 56 с первой 58, второй 60 и третьей парой 62 опорных стоек. Базовая плита 54 выполнена в форме соты, причем первый конец пары 58, 60, 62 опорных стоек, а именно нижний конец, установлен с каждой второй стороны базовой плиты 54. Таким образом, достигается линейно-симметричное исходное положение пар 58, 60, 62 опорных стоек, особенно благоприятно сказывающееся на усилиях, воспринимаемых позиционирующим устройством 52.
Каждая опорная стойка одной из пар 58, 60, 62 своим верхним концом с помощью соответствующего универсального шарнира 64 соединена с инструментальной плитой 66. Универсальные шарниры 64 являются карданными шарнирами, а инструментальная плита 66 в данном примере выполнена в виде диска. При установлении интервалов между универсальными шарнирами 64 всех опорных стоек в их парах 58, 60, 62 необходимо следить за тем, чтобы опорные стойки могли располагаться параллельно друг другу. К тому же, диаметр инструментальной плиты 66 выбирается меньшим, чем внешний диаметр базовой плиты 54, так чтобы пары опорных стоек имели, соответственно, определенный угол наклона относительно воображаемой вертикали к базовой плите 54, во всяком случае в исходном положении, при котором пары опорных стоек имеют одинаковую длину. Однако это исходное положение может, соответственно, изменяться в соответствии с возможными вариантами регулирования отдельных опорных стоек по длине.
Инструментальная плита 66 имеет множество выемок 68, например гладких, сквозных или резьбовых отверстий, обеспечивающих установку на этой инструментальной плите 66 различного инструмента (оснастки). В простейших случаях таким инструментом являются штифт, фиксатор или какой-либо другой соединительный элемент.
На примере первой пары 58 опорных стоек будут подробно показаны различные конструктивные элементы, которые имеются в каждой паре 58, 60, 62 опорных стоек. При этом первая пара 58 опорных стоек имеет первую 70, а также вторую опорную стойку 72, которые состоят по существу из первого 74 и второго цилиндрического конструктивного элемента 76. При этом второй цилиндрический элемент 76 входит в первый 76 таким образом, что создается телескопическая конструкция из конструктивных элементов 74, 76, причем цилиндрические конструктивные элементы 74, 76, предпочтительно, имеют относительно друг друга степень свободы поворота вдоль общей оси симметрии, вследствие чего согласно изобретению на опорные стойки могут действовать лишь растягивающие усилия и усилия сжатия, но только не моменты, благодаря чему перекос предотвращается. Обычно удлинение конструктивных элементов осуществляется с помощью встроенного шпиндельного или винтового привода.
С помощью соответствующего универсального шарнира 64 на каждом из опорных стоек 70, 72 добиваются того, чтобы заданный интервал между опорными стойками в точке соединения с инструментальной плитой 66 был неизменен. Универсальный шарнир 64 является карданом, что означает, что опорные стойки 70, 72 в принципе снабжены опорой, имеющей две степени свободы. На нижнем конце первой опорной стойки 70 установлен пятый поворотный подшипник 78, а на нижнем конце второй опорной стойки 72, соответственно, шестой поворотный подшипник 80. Расстояние от пятого 78 до шестого поворотного подшипника 80 относительно центров осей подшипников соответствует расстоянию между верхними универсальными шарнирами 64. Таким путем добиваются того, чтобы опорные стойки 70, 72 были параллельны друг другу, хотя бы пока они имеют одинаковую длину. Синхронное удлинение или укорочение опорных стоек 70, 72 является проблематичным, о чем более подробно речь пойдет ниже.
Пятый 78, а также шестой поворотный подшипник 80 установлены своими осями таким образом, что они могут поворачиваться только перпендикулярно другой оси 82 седьмого поворотного подшипника 84. При этом седьмой поворотный подшипник 84 располагается тангенциально воображаемой окружности вокруг виртуальной вертикали к базовой плите 54, а именно, в ее центре.
В качестве общего и синхронного в продольном направлении устройства приведения в действие первая пара 58 опорных стоек имеет общий электропривод 86, который в нижней части опорных стоек 70, 72 посредством соединительного элемента 88 соединен с несущим элементом 90. Несущий элемент 90 соединен с осью 82 подшипника таким образом, что при вращении оси он поворачивается вместе с ней и таким образом вместе с ней в случае вращения поворачиваются как соединительный элемент 88, так и электродвигатель 86. Тем самым добиваются того, что положение электродвигателя 86 относительно опорных ножек опорных стоек первой пары 58 остается неизменным. Подробности возможной передачи сил или моментов от электродвигателя 86 на первую пару 58 опорных стоек будут показаны ниже, поскольку здесь в принципе существуют несколько возможностей.
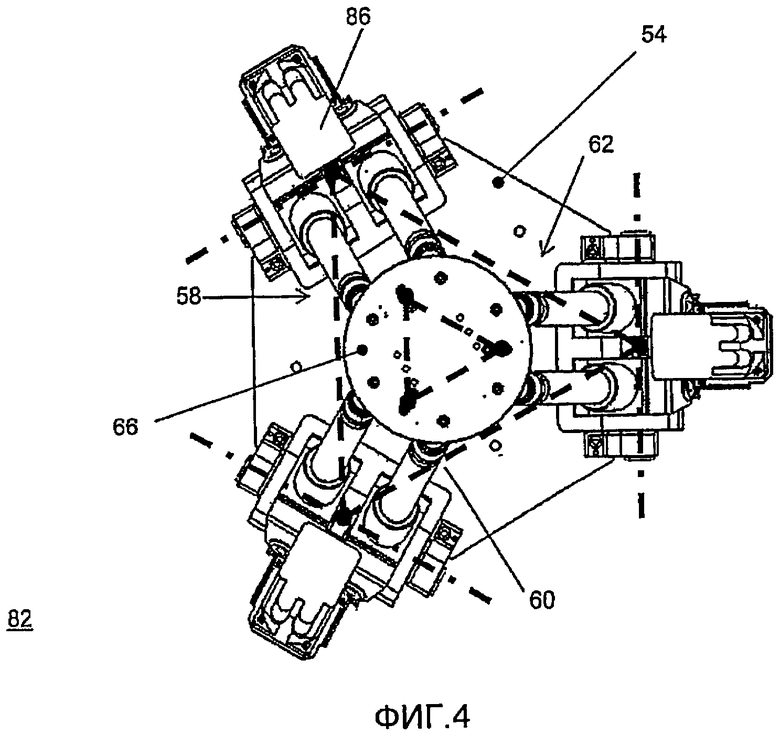
На фиг.4 позиционирующее устройство 52 показано сверху с видом на инструментальную плиту 66, причем пары 58, 60, 62 опорных стоек имеют одинаковую длину, так что инструментальная плита 66 в этом виде располагается точно над центром базовой плиты 54. На этой фигуре для одинаковых деталей, соответственно, используются те же обозначения, что и на фиг.3. Из этой фигуре путем обозначения поворотных осей, а именно оси 82 подшипника и соответствующих осей поворотных подшипников очередных пар 60, 62 опорных стоек, становится понятно, что симметричное расположение пар 58, 60, 62 опорных стоек выбрано в равностороннем треугольнике, которое по меньшей мере в таком исходном положении инструментальной плиты 66 способствует целесообразному, равномерному, а также симметричному распределению сил и моментов, которые могли бы действовать на инструментальную плиту 66, по отдельным парам 58, 60, 62. Таким образом, возможен удобный одинаковый расчет любого отдельного конструктивного элемента, и, кроме того, благодаря одинаковости пар 58, 60, 62 опорных стоек, а также их подшипниковых опор и приводов появляется возможность конструирования и изготовления одного типа привода и пар опорных стоек, из которых затем получается соответствующее позиционирующее устройство.
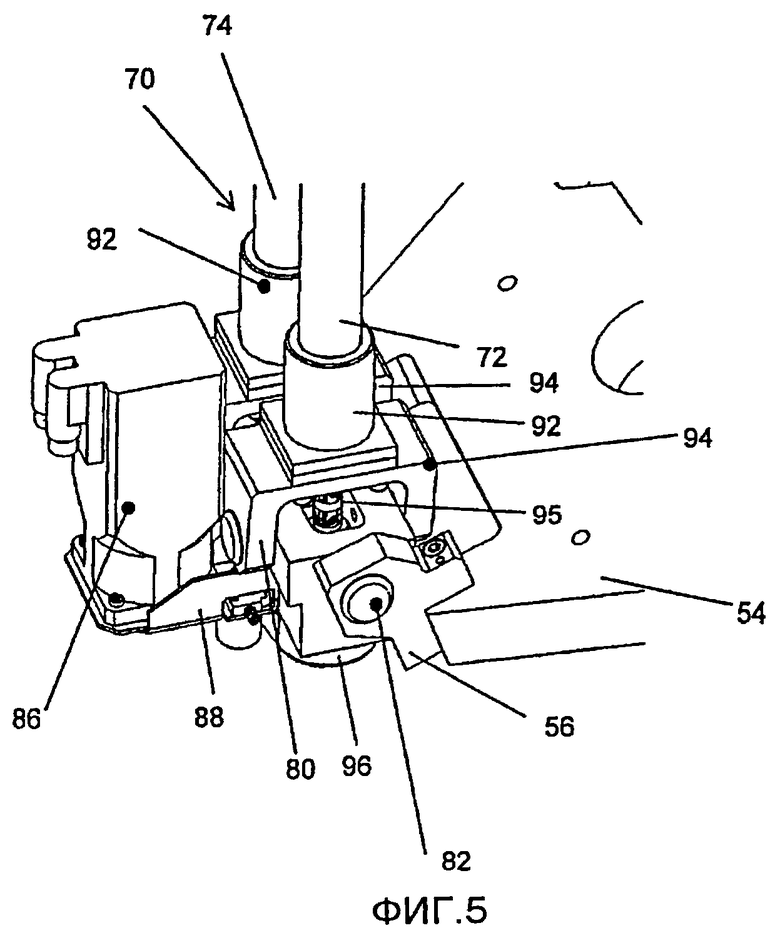
На фиг.5 в увеличенном виде детально показано основание первой пары 58 опорных стоек, причем электродвигатель 86, соединительный элемент 88, шестой поворотный подшипник 80, ось 82 подшипника, а также первый соединительный элемент 56 показаны увеличенными. На фигуре отчетливо видны нижние соединительные элементы 92, жестко соединяющие цилиндрический конструктивный элемент 74 первой опорной стойки 70 с первой поворотной вилкой 94 пятого поворотного подшипника 78. С соответствующей поворотной вилкой 94 соединен также шестой поворотный подшипник 80 второй опорной стойки 72.
Кроме того, на этой фигуре в увеличенном виде показано, что между нижним узлом 96 и вторым цилиндрическим конструктивным элементом 76 или соответствующим конструктивным элементом второй опорной стойки 72 имеется механическое соединение.
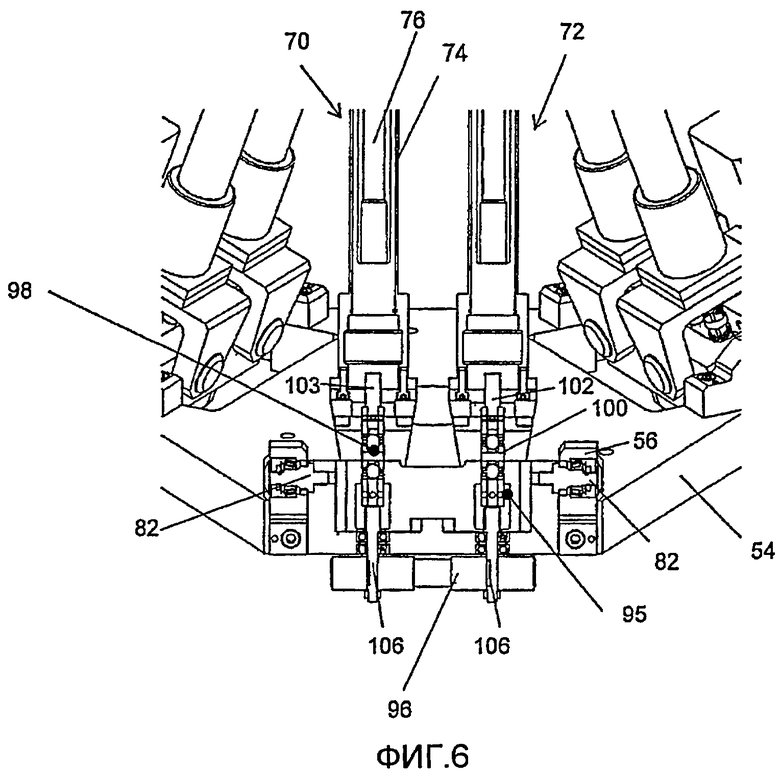
На фиг.6 в поперечном разрезе по оси 82 подшипника показана первая форма выполнения механического соединителя 95 в виде четвертого и пятого карданного шарнира 100 в соответствии с первой схемой согласно фиг.2. Карданные шарниры 98, 100 с одной стороны соединены со стержнями 102, обеспечивающими вращение второго цилиндрического конструктивного элемента 76 под соответствующим конструктивным элементом второй опорной стойки 62. С другой стороны карданные шарниры 98, 100 соединены с соединительными элементами 104, которые, в свою очередь, соединены с приводными валами 106. В нижнем, не показанном более подробно узле 96 обеспечено такое положение, что привод 86 приводит во вращение оба приводных вала 106 с одинаковой скоростью, так что обеспечивается равномерное удлинение или укорочение пар опорных стоек в их продольном направлении. В представленной форме выполнения первой пары 58 опорных стоек это должно производиться с помощью общего привода посредством общей шестерни, которая, однако, на этой фигуре не попадает в плоскость чертежа и потому не показана. При таком виде привода необходимо следить за тем, чтобы один из вторых конструктивных элементов 76 удлинялся в результате вращения влево, в то время как другой приводился в движение и тем самым удлинялся при вращении вправо (или наоборот). При укорочении привод работает, соответственно, с противоположным направлением вращения.
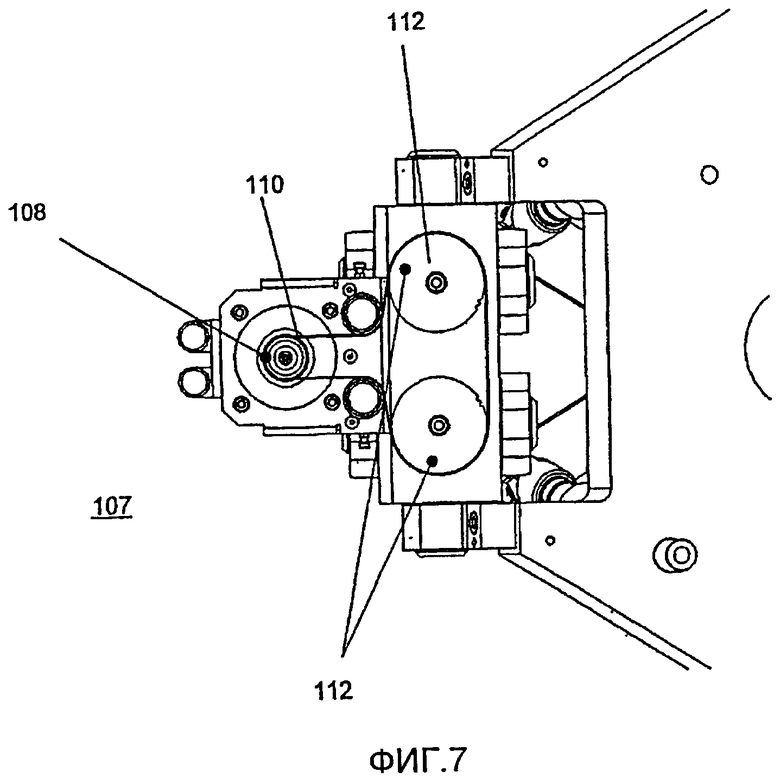
На фиг.7 показана вторая возможность выполнения привода продольного перемещения (регулирования) пар опорных стоек, причем существенное различие между примерами осуществления на предшествующей и на данной фигуре усматривается в том, что зубчатый ремень 110, проводимый, кроме того, через приводные колеса 112, осуществляющие в вышеприведенном варианте выполнения по существу функции приводных валов 106, приводится во вращение вторым электродвигателем 108. Натяжение зубчатого ремня 110 регулируется с помощью двух регулировочных натяжных роликов, воздействующих на беззубую обратную сторону зубчатого ремня 110 с заданным регулировкой усилием и обеспечивающих таким образом его заданное расчетное предварительное натяжение. Во второй форме 107 выполнения, помимо этого, достигается одинаково направленное приведение в движение вторых цилиндрических конструктивных элементов 76, так что при разработке опорных стоек можно не обращать внимания на направление вращения привода конструктивных элементов.
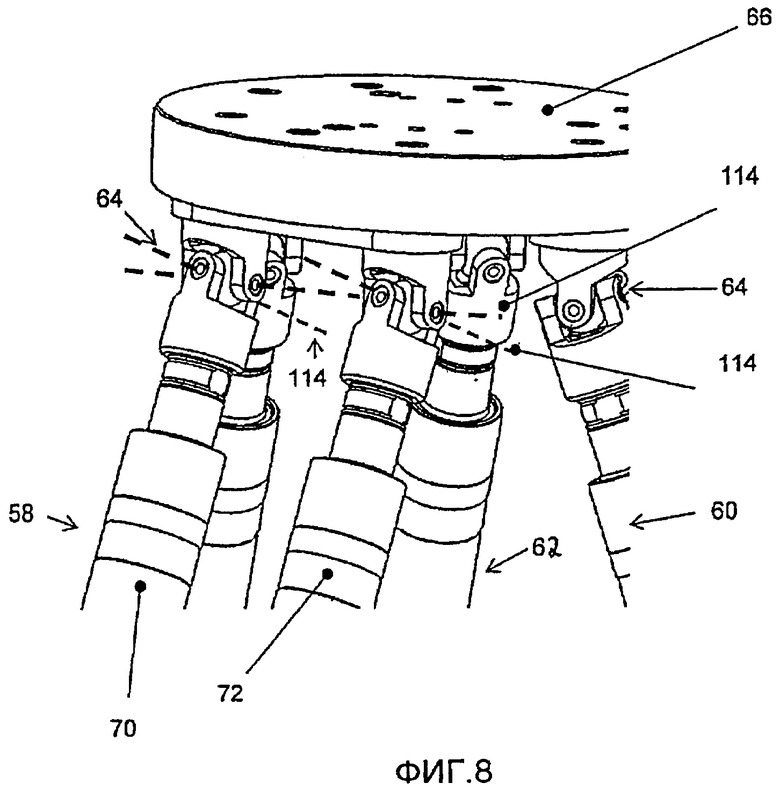
На фиг.8 изображен верхний конец пар 58, 60, 62 опорных стоек в месте их соединения с инструментальной плитой 66. На этой фигуре упомянутые конструктивные элементы также снабжены соответствующими обозначениями, введенными ранее. На фиг.8 для максимально возможной визуализации степеней свободы шарниров изображены шарнирные оси 114. А именно, на последующих фигурах показано, как выглядят возможные положения первого позиционирующего устройства 52, снабженного такими шарнирами 64.
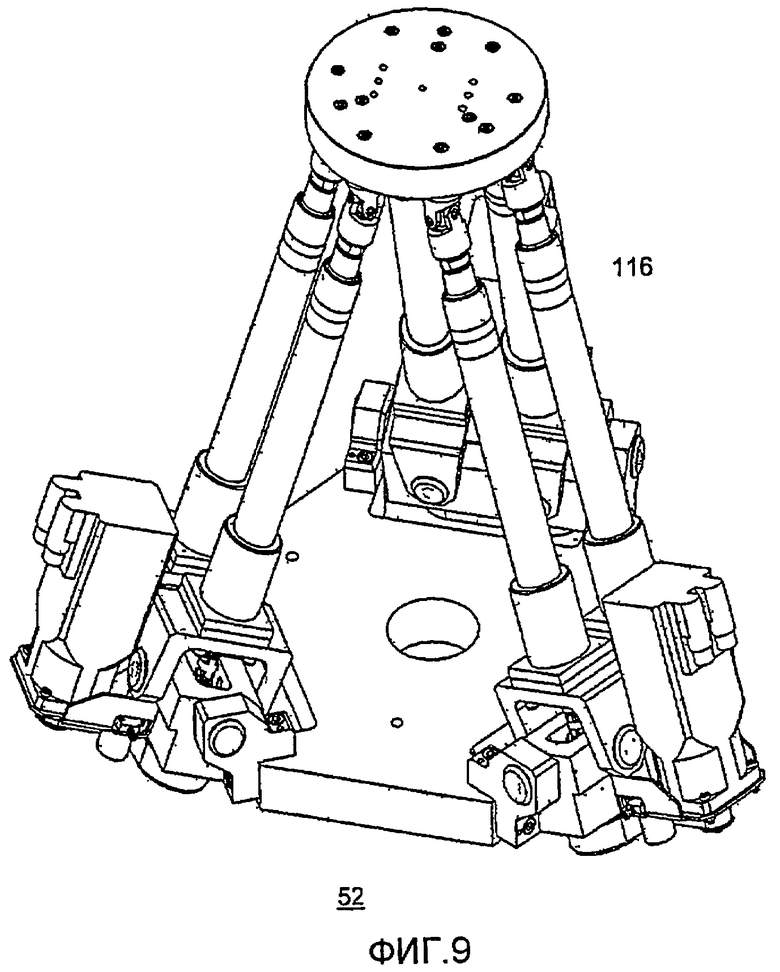
На фиг.9 показано первое положение 116 первого позиционирующего устройства 52, в котором инструментальная плита 66 установлена точно над центром базовой плиты 54, причем пары 58, 60, 62 опорных стоек установлены на свою минимальную длину.
На фиг.10 показано второе положение 118 первого позиционирующего устройства 52, в котором инструментальная плита 66 также расположена точно над центром базовой плиты 54, но пары 58, 60, 62 опорных стоек установлены на свою максимальную длину. Из сопоставления фиг.10 с фиг.9 видно, что инструментальная плита 66 устанавливается вдоль своей оси перемещения.
На фиг.11 показано третье положение 120 первого позиционирующего устройства 52, в котором пары 58, 60, 62 опорных стоек установлены на свою по сравнению с фиг.9 и 10 среднюю длину.
На фиг.12 показано четвертое положение 120 первого позиционирующего устройства 52, в котором пара опорных стоек, видимая на фигуре слева, выдвинута на меньшее расстояние, чем обе другие пары опорных стоек, так что в результате инструментальная плита 66 оказывается почти прямо над парой опорных стоек, видимой на фигуре слева. При этом диск инструментальной плиты, как и на предыдущих фигурах, продолжает оставаться параллельным базовой плите 54. С помощью фигуры становится понятно, что в зависимости от действия сил и моментов на инструментальную плиту 66 на пары 58, 60, 62 опорных стоек могут действовать не только усилия сжатия, но и растягивающие усилия, которые определяется действием силы или момента.
Фиг.13 относится ко второй форме выполнения 124 нижнего узла, передающего приводную мощность двигателя на пару опорных стоек определенным образом. При этом на этой фигуре показана только схема взаимодействия различных конструктивных элементов, причем обозначение позиций конструктивных элементов выбрано таким же, как и на фиг.1 или 2. Поэтому в дальнейшем также будут описаны лишь существенные различия по сравнению с предшествующими системами привода.
Приводная мощность для четвертой пары 126 опорных стоек обеспечивается за счет приводного вала 128. Как приводится во вращение сам приводной вал 128, конкретно не показано, однако это может осуществляться пневматическим, гидравлическим, электрическим или каким-либо иным известным специалисту способом. С помощью привода 130 приводная мощность приводного вала 128 передается опорным стойкам четвертой пары 126 опорных стоек. В выбранном примере привод 130 имеет первую шестерню 132, соединенную с первым соединительным валом 134 и вращающим его в процессе приведения в действие. Вращение приводит в действие привод второй шестерни 136, установленной на первом стержне 138 опорной стойки. Третья шестерня 140, установленная на приводном валу 128, приводит во вращение, соответственно, второй приводной вал 142, который, в свою очередь, приводит во вращение четвертую шестерню 144, которая, в свою очередь, установлена на втором стержне 146 опорной стойки. Стержни 138, 146 опорных стоек вращаются вокруг своих продольных осей и имеют соответствующие подшипниковые опоры, причем подшипниковая опора, расположенная в конце опорных стоек, установлена вышеописанным способом с карданом 148. Для компенсации реакции опоры второго подшипника в стержнях 138, 146 предусмотрены соединительные стержни 150, соединяющие привод с указанной опорой. На фигуре это обозначено соответствующими соединительными стержнями 150, соединяющими соответствующие условные обозначения подшипников на приводном валу 128 с условными обозначениями подшипников на стержнях 138, 146 опорных стоек. С таким же успехом можно также допустить, что вместо таких соединительных стержней 150 реакцию опоры может, соответственно, скомпенсировать корпус. Наконец, прочный на скручивание компенсатор 127 изменения длины обеспечивает совместный поворот пары опорных стоек вокруг осей 26 вращения без ущерба для передачи приводной мощности.
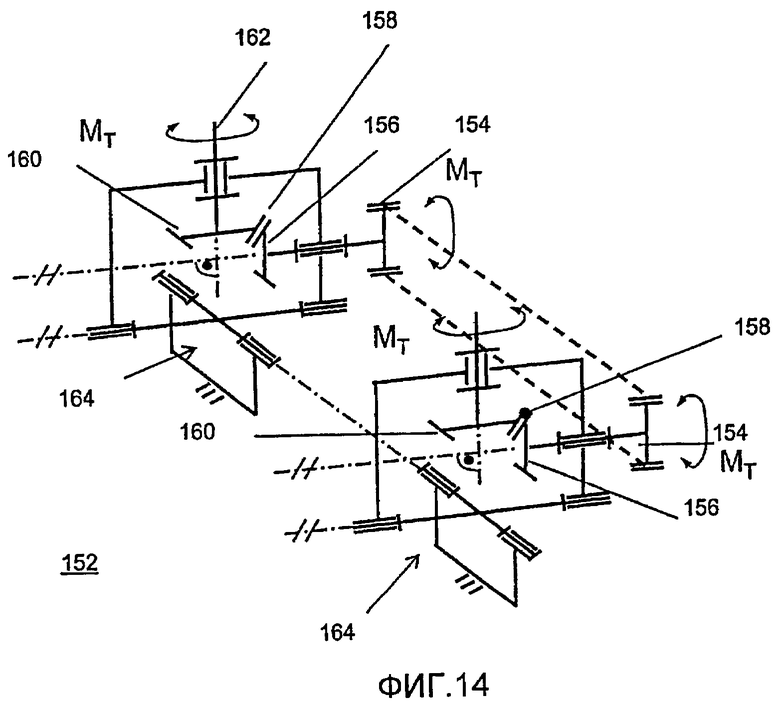
Как показано на фиг.14, в третьей форме 152 выполнения привода согласно изобретению используется ременной привод, который для приведения во вращение двух приводных колес 154 может быть выполнен, например, в виде зубчатого, или клинового, или тягового ремня. Приводные колеса 154 воздействуют, соответственно, на первое коническое колесо 156 конической передачи 158, которая приводит во вращение второе коническое колесо 160 конической передачи 158, которая воздействует на стержни 162 опорных стоек. Эти стержни 162 опорных стоек установлены в универсальной опоре 164 карданным образом.
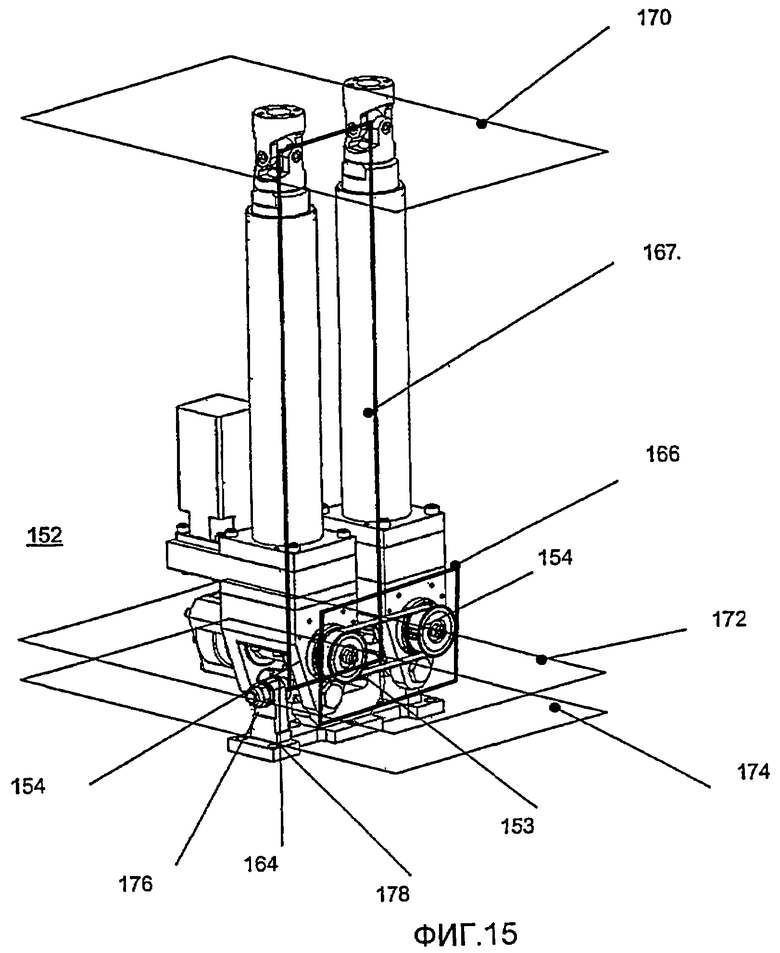
На фиг.15 показан вариант третьей формы 152 выполнения, схематически представленной на фиг.14 и показанной на данной фигуре в принципе в качестве конструктивного предложения. Поэтому соответствующие видимые конструктивные элементы также имеют обозначения в соответствии с фиг.14.
В частности, в этой форме выполнения особенно удобным оказалось то, что различные технические функции, выделенные на фигуре соответствующими четырехугольниками, реализуются в одной плоскости. Такой плоскостью является, например, плоскость 166, в которой привод осуществляется с помощью приводных колес 154, а также приводного ремня 153. Вторая плоскость 168 образована стержнями 138, 146 опорных стоек, а также соответствующими подшипниковыми опорами на обоих концах стержней 138, 146 опорных стоек. Третья плоскость 170 образована инструментальным диском, который, однако, на этой фигуре не показан, в то время как четвертая плоскость 172 определена осями вращения приводных колес 154. Наконец, видна еще и пятая плоскость 174, параллельная четвертой плоскости 172 и определяемая местом 176 подшипника, а именно поворотного подшипника, ближе всего расположенного к опорной ножке 178. При этом опорная ножка 178 соединительного элемента относится к базовой структуре, не показанной на этой фигуре, с которой эта форма выполнения могла бы быть соединена.
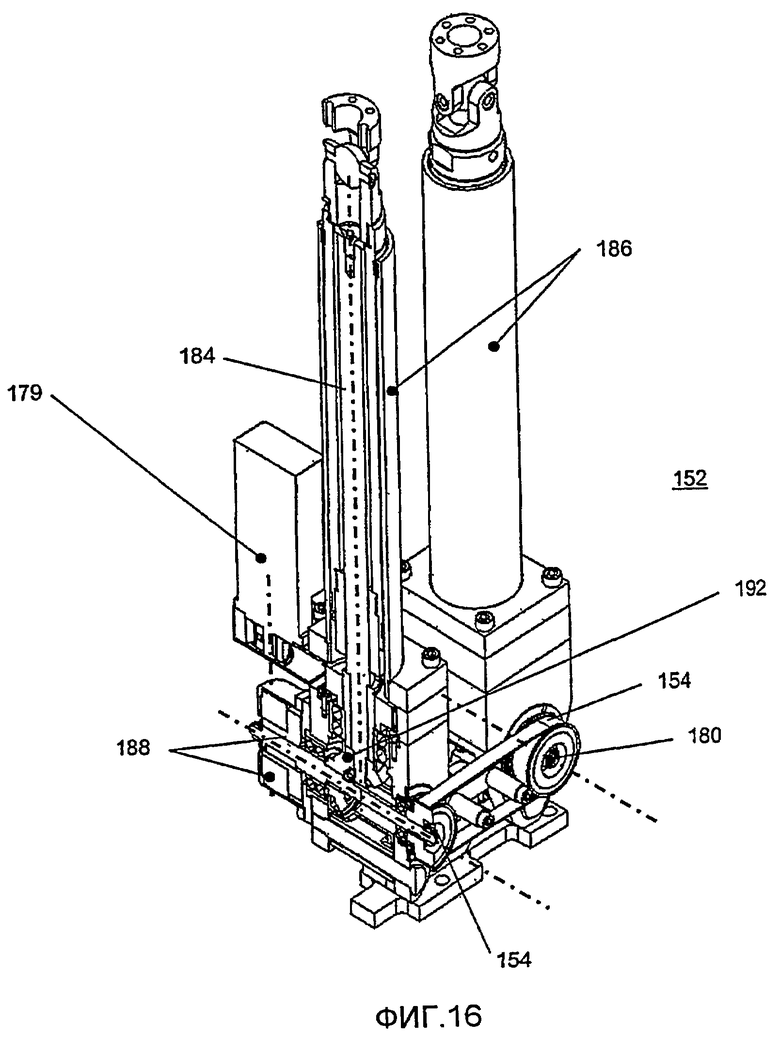
На фиг.16 изображена третья форма выполнения 152 с разрезом, вследствие чего снова используются те же обозначения, что и раньше. В частности, на этой фигуре должно быть показано, что поворотный серводвигатель 179 установлен таким образом, что он приводит во вращение одно из приводных колес 154 с помощью вала 180. Другое приводное колесо 154 снова приводится во вращение с помощью приводного ремня 153, приводящего во вращение другой вал 182. С помощью вала 180 и другого вала 182 приводятся во вращение соответствующие вторичные валы 184 опорных стоек 186 регулируемой длины. При этом расстояние между отдельными регулируемыми опорными стойками 186 фиксируется как за счет обусловленного конструкцией расстояния между валом 180 и другим валом 182, так и за счет места соединения с инструментальной плитой (не показана) на другом конце опорных стоек 186, регулируемых по длине, в области верхних универсальных шарниров. На другом валу 182 со стороны, противоположной приводному колесу 154, установлен тормоз 188, в случае необходимости блокирующий другой вал 182. Таким образом, простыми средствами можно добиться того, чтобы регулируемые по длине опорные стойки 186 фиксировались в заранее определенном положении без восприятия приводом возможно действующих сил. Это придает данному устройству особую механическую устойчивость.
К другим мероприятиям, способствующим устойчивости такой компоновки, относится применение шестерен для передачи сил, как например, конического зубчатого колеса 192, передающего движущую силу другого вала 182 на один из вторичных валов 184 с помощью конической зубчатой передачи под углом 90°.
Кроме того, при такой компоновке осуществляется разделение функций, для чего поворотный серводвигатель 179 оказывает воздействие на вал 180, а первый тормоз 180 - на другой вал 182. Таким путем достигается особенно компактное распределение отдельных технических функций.
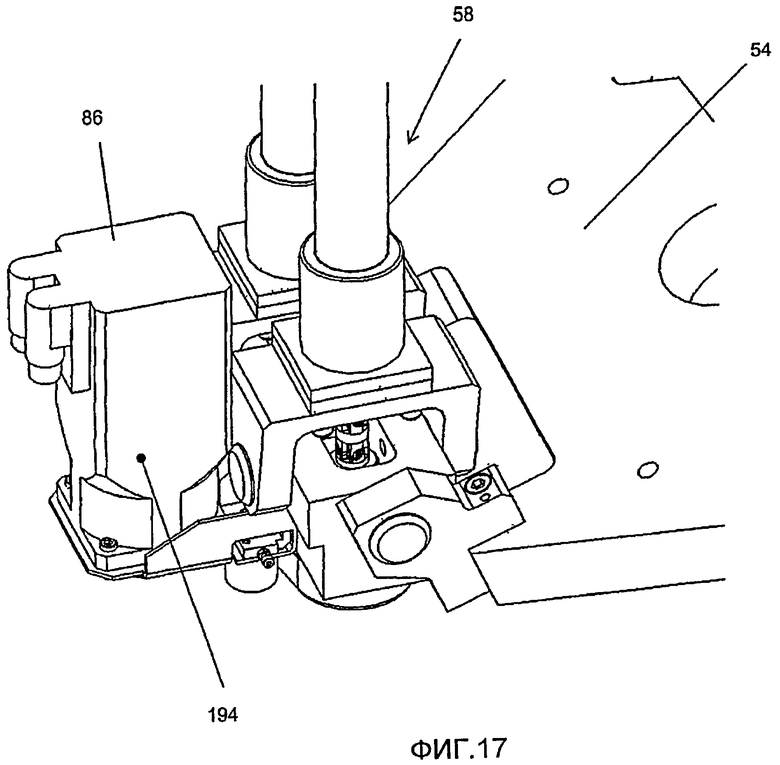
Еще одно тормозное устройство представлено на фиг.17, которое является повторением детального изображения первой пары 58 опорных стоек, причем на этой фигуре должно быть только показано, что второй тормоз 194 уже встроен в электродвигатель 86.
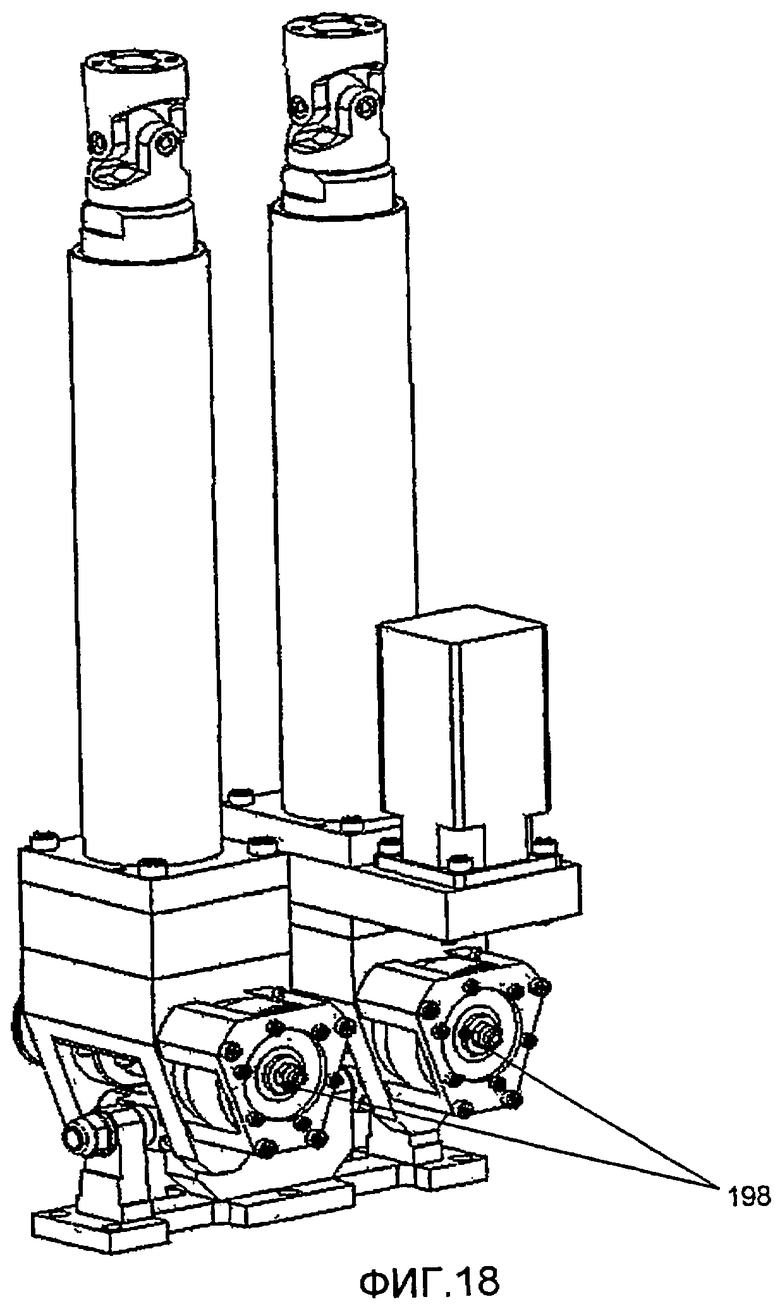
На фиг.18 показан вариант выполнения тормоза 196, содержащий два составляющих тормоза, установленных на одном и на другом вращающихся валах, каждый из которых вращает соответствующий вторичный вал одной из обеих опорных стоек. При такой расстановке создается резервирование тормозов. Даже если один из составляющих тормозов третьего тормоза 196 откажет, другой составляющий тормоз с помощью механической кинематической связи затормозит оба вторичных вала, в том числе вторичный вал, который в этом случае не был заторможен непосредственно. Кроме того, оба тормоза легко доступны, что упрощает их техническое обслуживание и контроль.
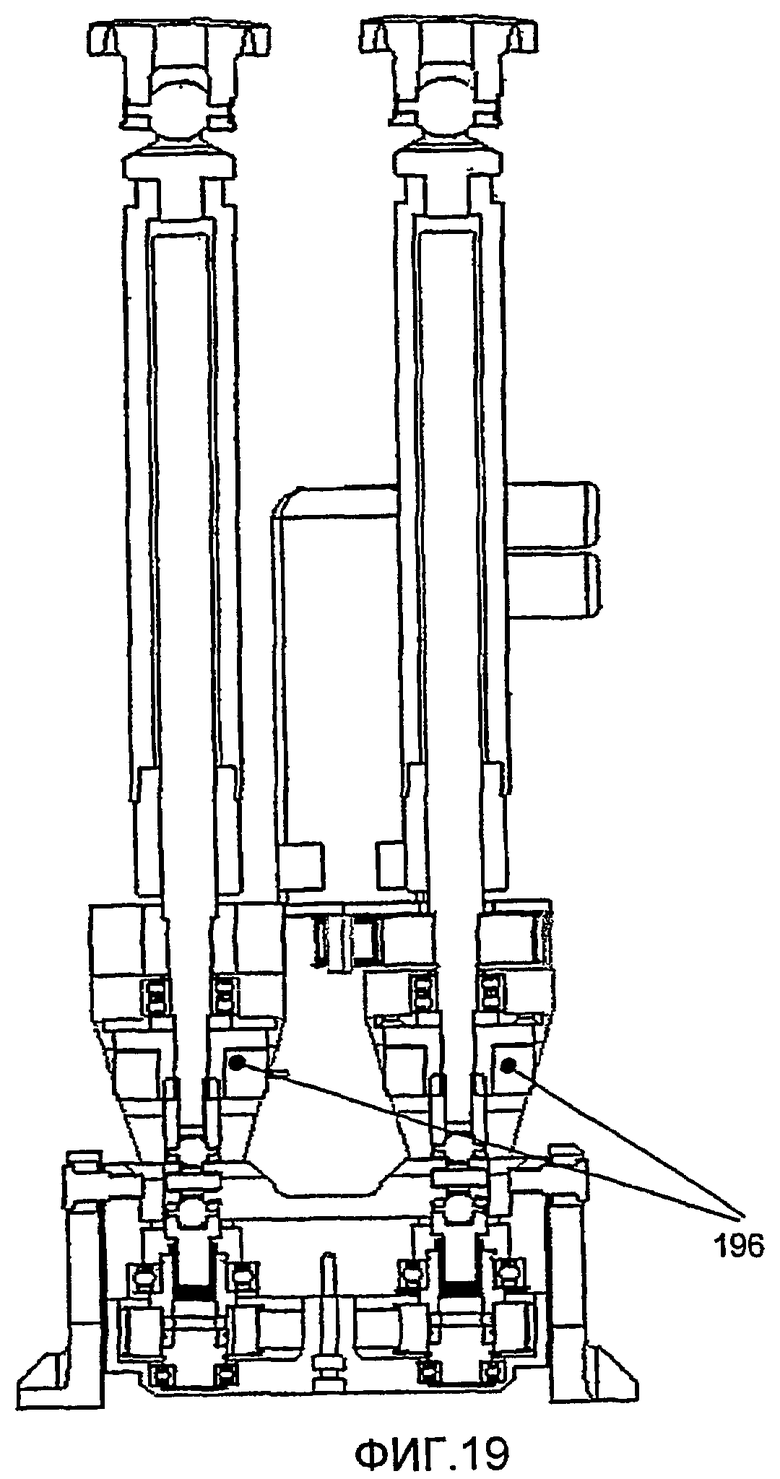
На фиг.19 показаны еще одна возможность и положение для установки пары 198 тормозов. В этом примере в каждый из опорных стоек встроены, в свою очередь, по два составляющих тормоза, так что составляющий тормоз может непосредственно воздействовать на вторичные валы и таким образом с помощью соответствующих тормозных сил фиксировать каждую отдельную опорную стойку.
В этом случае преимущество состоит в том, что конструкция при сохранении механической избыточности тормоза становится еще компактнее.
Перечень позиций
10 базовая схема
12 первая опорная стойка
14 вторая опорная стойка
16 цилиндропоршневая система
18 первый карданный шарнир
20 второй карданный шарнир
22 опорная структура
24 первый поворотный подшипник
26 второй поворотный подшипник
28 первая поворотная ось
30 третий поворотный подшипник
32 четвертый поворотный подшипник
34 вторая поворотная ось
36 ось
38 приспособление для крепления обрабатываемой детали
40 первая схема/шарнирная система
42 верхний вал
43 нижний вал
44 первый подшипник вращения
46 второй подшипник вращения
48 элемент компенсации длины
50 третий карданный шарнир
52 первое позиционирующее устройство
54 базовая плита
56 первый соединительный элемент
58 первая пара опорных стоек
60 вторая пара опорных стоек
62 третья пара опорных стоек
64 универсальный шарнир
66 инструментальная плита
68 выемка
70 первая опорная стойка
72 вторая опорная стойка
74 первый цилиндрический конструктивный элемент
76 второй цилиндрический конструктивный элемент
78 пятый поворотный подшипник
80 шестой поворотный подшипник
82 ось подшипника
84 седьмой поворотный подшипник
86 электродвигатель
88 второй соединительный элемент
90 несущий элемент
92 третий соединительный элемент
94 первая поворотная вилка
95 механический соединитель
96 нижний узел
98 четвертый карданный шарнир
100 пятый карданный шарнир
102 стержни
104 соединительный элемент
106 приводной вал
107 вторая форма выполнения
108 второй электродвигатель
110 зубчатый ремень
112 приводные колеса
114 шарнирные оси
116 первое положение
118 второе положение
120 третье положение
122 четвертое положение
124 третья форма выполнения
126 четвертая пара опорных стоек
128 приводной вал
130 передача
132 первая шестерня
134 первый приводной вал
136 вторая шестерня
138 первый стержень опорной стойки
140 третья шестерня
142 второй приводной вал
144 четвертая шестерня
146 второй стержень опорной стойки
148 карданная опора
150 соединительные стержни
152 четвертая форма выполнения
154 приводные колеса
156 первое коническое колесо
158 конический зубчатый привод
160 второе коническое колесо
162 стержни опорной стойки
164 универсальная опора
166 первая плоскость
168 вторая плоскость
170 третья плоскость
172 четвертая плоскость
174 пятая плоскость
176 место подшипника
178 опорная ножка
179 поворотный серводвигатель
180 вал
182 другой вал
184 вторичный вал
186 опорные стойки, регулируемые по длине
188 первый тормоз
190 верхние универсальные шарниры
192 коническое колесо
194 второй тормоз
196 третий тормоз
198 четвертый тормоз
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ | 2001 |
|
RU2262433C2 |
| Металлорежущий станок | 1975 |
|
SU858550A3 |
| ПРИСПОСОБЛЕНИЕ К КОЛЕСНЫМ АВТОМОБИЛЯМ ДЛЯ ДВИЖЕНИЯ ИХ ПОСРЕДСТВОМ СИСТЕМЫ ТОЛКАЮЩИХ И ПОДДЕРЖИВАЮЩИХ РЫЧАГОВ | 1917 |
|
SU3221A1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ МНОГООПОРНЫХ ДОЖДЕВАЛЬНЫХ МАШИН ФРОНТАЛЬНОГО И КРУГОВОГО ДЕЙСТВИЯ | 1998 |
|
RU2129262C1 |
| МАШИНА ДЛЯ ДОБЫЧИ ЛАКРИЧНОГО СЫРЬЯ | 1999 |
|
RU2163431C1 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ ШИХТОВОГО МАТЕРИАЛА В ШАХТНОЙ ПЕЧИ | 2010 |
|
RU2519711C2 |
| МЕТАЛЛОРЕЖУЩИЙ ГЕКСАПОДНЫЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР И ГЕКСАПОДНЫЙ МЕХАНИЗМ ДЛЯ НЕГО | 2005 |
|
RU2299797C2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2018 |
|
RU2758224C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| ВНУТРЕННИЙ МЕХАНИЗМ УПАКОВОЧНОЙ МАШИНЫ | 2013 |
|
RU2616829C2 |
Изобретение относится к позиционирующему устройству. Позиционирующее устройство содержит опорную структуру, приспособление для крепления обрабатываемого изделия и регулируемые по длине опорные стойки, соединенные с одной стороны с опорной структурой, а с другой стороны, с приспособлением для крепления обрабатываемого изделия. Причем опорные стойки в местах соединения с опорной структурой и с приспособлением для крепления изделия установлены подвижно. По меньшей мере, одна часть опорных стоек выполнена с возможностью регулирования по длине и, по меньшей мере, одна часть опорных стоек имеет привод для регулирования по длине. По меньшей мере, шесть опорных стоек установлены попарно в треугольник, причем, по меньшей мере, в двух парах опорных стоек опорные стойки расположены параллельно. Каждая пара опорных стоек имеет общий привод, посредством которого она имеет возможность исключительно синхронного регулирования по длине. При этом каждая пара опорных стоек на первом конце продольного протяжения опорных стоек имеет поворотный подшипник, а на втором конце продольного протяжения каждой опорной стойки - второй подшипник. Изобретение позволяет создать компактное позиционирующее устройство с большой жесткостью. 11 з.п. ф-лы, 19 ил.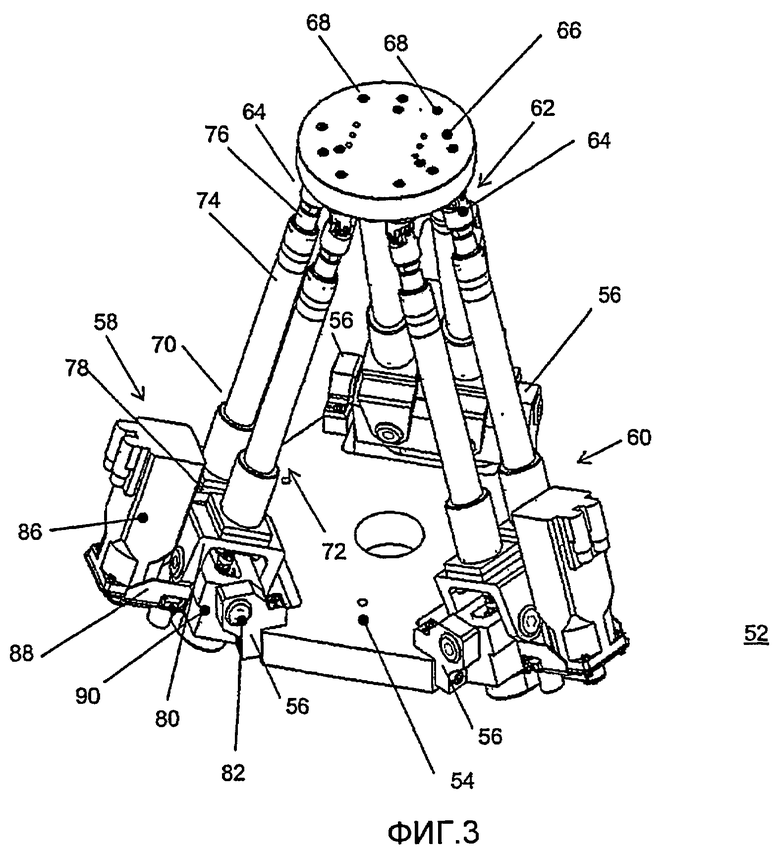
1. Позиционирующее устройство (52), содержащее опорную структуру (22), приспособление (38) для крепления обрабатываемого изделия и регулируемые по длине опорные стойки (70, 72; 186), соединенные, с одной стороны, с опорной структурой, а с другой стороны, с приспособлением (38) для крепления обрабатываемого изделия, причем опорные стойки (70, 72; 186) в местах соединения с опорной структурой и с приспособлением (38) для крепления обрабатываемого изделия установлены подвижно, при этом, по меньшей мере одна часть опорных стоек (70, 72; 186) выполнена с возможностью регулирования по длине, и по меньшей мере одна часть опорных стоек (70, 72; 186) имеет привод для регулирования по длине, отличающееся тем, что по меньшей мере шесть опорных стоек (70, 72; 186) установлены попарно в треугольник, причем по меньшей мере в двух парах (58, 60, 62; 126) опорных стоек опорные стойки (70, 72; 186) расположены параллельно, при этом каждая пара (58, 60, 62; 126) опорных стоек имеет общий привод, посредством которого она имеет возможность исключительно синхронного регулирования по длине, при этом каждая пара (58, 60, 62; 126) опорных стоек на первом конце продольного протяжения опорных стоек (70, 72; 186) имеет поворотный подшипник (24, 26, 30, 32; 78, 80; 84), а на втором конце продольного протяжения каждой опорной стойки (70, 72) - второй подшипник.
2. Позиционирующее устройство (52) по п.1, отличающееся тем, что каждая опорная стойка (70, 72) пары (58, 60, 62; 126) опорных стоек имеет поворотный подшипник (24, 26, 30, 32; 78, 80; 84), причем поворотные подшипники (24, 26, 30, 32; 78, 80; 84) имеют общую среднюю линию осей подшипников.
3. Позиционирующее устройство (52) по п.1 или 2, отличающееся тем, что количество опорных стоек равно шести.
4. Позиционирующее устройство (52) по п.1, отличающееся тем, что привод является гидравлическим, пневматическим или электрическим.
5. Позиционирующее устройство (52) по п.1, отличающееся тем, что привод соединен с соответствующей парой (58, 60, 62; 126) опорных стоек посредством ремня, зубчатого ремня (110), механизма передачи (130) или зубчатых колес, или другой равноугольной связи.
6. Позиционирующее устройство (52) по п.1, отличающееся тем, что каждая пара (58, 60, 62; 126) опорных стоек снабжена тормозным устройством, с помощью которого в случае необходимости соответствующий привод или по меньшей мере другой конструктивный элемент (74, 75, 76), приводимый в движение приводом, имеет возможность торможения или фиксирования.
7. Позиционирующее устройство (52) по п.1, отличающееся тем, что первый конец относится к опорной структуре.
8. Позиционирующее устройство (52) по п.1, отличающееся тем, что на первом конце установлен третий подшипник.
9. Позиционирующее устройство (52) по п.1 или 8, отличающееся тем, что сумма степеней свободы поворотного подшипника (24, 26, 30, 32; 78, 80; 84), второго, а также третьего подшипника соответствует степени свободы ожидаемой нагрузки.
10. Позиционирующее устройство (52) по п.1, отличающееся тем, что в качестве поворотных подшипников (24, 26, 30, 32; 78, 80; 84) используют карданные опоры.
11. Позиционирующее устройство (52) по п.1, отличающееся тем, что привод и/или опорные стойки содержат измерительные устройства положения.
12. Позиционирующее устройство (52) по п.11, отличающееся тем, что с помощью устройства управления и показаний измерительного устройства положения задают положение приспособления для крепления обрабатываемого изделия или его местонахождение в пространстве.
| US 6425177 B1, 30.07.2002 | |||
| КРАЙНЕВ А.Ф | |||
| Механика машин | |||
| Фундаментальный словарь | |||
| - М.: Машиностроения, 2000, с.494-495 | |||
| US 6041500 А, 28.03.2000 | |||
| Сигнатурный анализатор | 1985 |
|
SU1280635A1 |
| US 5656905 А, 12.08.1997. | |||

