Область техники
Изобретение относится к устройству управления и способу управления двигателем внутреннего сгорания, установленным на транспортном средстве.
Уровень техники
В течение работы на холостом ходу двигателя внутреннего сгорания, установленного на транспортном средстве, таком как автомобиль, осуществляется управление холостым ходом двигателя для регулирования частоты вращения двигателя до целевой частоты вращения двигателя, заданной в соответствии с рабочим состоянием двигателя, таким как температура двигателя. Целевая частота вращения двигателя для управления холостым ходом двигателя задается следующим образом на основе, например, температуры двигателя. То есть целевая частота вращения двигателя для управления холостым ходом двигателя задается более высокой, когда температура двигателя низкая и, следовательно, вязкость смазочного масла высокая, чем когда температура двигателя высокая и, следовательно, вязкость смазочного масла низкая. Это происходит потому, что, когда вязкость смазочного масла для двигателя внутреннего сгорания увеличена, сопротивление вращению двигателя увеличивается, и вероятность того, что двигатель остановится при работе на холостом ходу в результате увеличенного сопротивления вращению, должна быть устранена. Кроме того, когда двигатель внутреннего сгорания работает на холостом ходу, также осуществляется управление предотвращением уменьшения частоты вращения двигателя для быстрого увеличения частоты вращения двигателя для предотвращения остановки двигателя, когда частота вращения двигателя равна или ниже пороговой частоты вращения двигателя, которая ниже, чем целевая частота вращения двигателя (см. публикацию заявки на патент Японии №2006-46263 (JP-A-2006-46263) (абзацы [0030] и [0036])).
Если температура двигателя является низкой и целевая частота вращения двигателя для управления холостым ходом двигателя задана высокой, когда скорость транспортного средства равна или ниже заданной скорости транспортного средства, для переключения работы двигателя на работу на холостом ходу в процессе остановки транспортного средства действием тормозов частота вращения двигателя в течение работы на холостом ходу также задается высокой соответственно. В этом случае движущая сила, прилагаемая к ведущим колесам транспортного средства в этот момент, становится большой в результате того, что частота вращения двигателя в течение работы на холостом ходу задана высокой, как описано выше. Даже когда тормозная сила прилагается к ведущим колесам при торможении, частота вращения ведущих колес маловероятно будет уменьшаться. Таким образом, потребуется некоторое время для остановки транспортного средства после движения.
Для преодоления такой ситуации в процессе остановки транспортного средства после движения трансмиссия может поддерживаться в нейтральном состоянии для предотвращения приложения движущей силы к ведущим колесам транспортного средства, как описано в публикации заявки на патент Японии №8-74992 (абзацы [0032]-[0034]). В этом случае, даже если частота вращения двигателя скорректирована до целевой частоты вращения двигателя, которая была задана высокой, при переключении работы двигателя на работу на холостом ходу, что происходит в результате того, что скорость транспортного средства стала равной или ниже, чем заданная величина, движущая сила, основанная на частоте вращения двигателя, в этот момент не передается ведущим колесам. Таким образом, предполагается, что транспортное средство может быть быстро остановлено после движения после переключения на работу на холостом ходу. Однако в процессе остановки транспортного средства после движения до переключения на работу на холостом ходу трансмиссия поддерживается в нейтральном состоянии, и, следовательно, линия передачи движущей силы между всеми ведущими колесами и двигателем внутреннего сгорания отключена. Таким образом, сопротивление вращению двигателя внутреннего сгорания не действует как тормозная сила для ведущих колес, и тормозная сила для остановки транспортного средства после движения полностью обеспечивается одними тормозами. Однако возможно, что одни тормоза не будут способны обеспечивать заданную тормозную силу. Если тормозная сила не может быть легко обеспечена, требуется более продолжительное время для остановки транспортного средства после движения.
Далее, вместо поддержания трансмиссии в нейтральном состоянии в процессе остановки транспортного средства после движения, также возможно принудительное снижение целевой частоты вращения двигателя управления холостым ходом двигателя при переключении работы двигателя на работу на холостом ходу и, таким образом, снижение частоты вращения двигателя в течение работы двигателя на холостом ходу таким образом, чтобы движущая сила, прилагаемая к ведущим колесам на основе частоты вращения двигателя, поддерживалась небольшой. В этом случае в процессе остановки транспортного средства после движения перед переключением на работу на холостом ходу сопротивление вращению двигателя внутреннего сгорания действует как тормозная сила для ведущих колес. Таким образом, тормозная сила для быстрой остановки транспортного средства после движения может прилагаться к ведущим колесам благодаря сопротивлению вращению двигателя внутреннего сгорания и тормозам. Кроме того, после переключения работы двигателя на работу на холостом ходу в процессе остановки транспортного средства после движения движущая сила, прилагаемая к ведущим колесам, может поддерживаться небольшой посредством принудительного снижения целевой частоты вращения двигателя, используемой в управлении скоростью холостого хода двигателя. Таким образом, транспортное средство быстро останавливается после движения.
Как описано выше, транспортное средство быстро останавливается после движения посредством принудительного снижения целевой частоты вращения двигателя для управления частотой вращения холостого хода двигателя при переключении работы двигателя на работу на холостом ходу в процессе остановки транспортного средства после движения.
Однако когда целевую частоту вращения двигателя принудительно снижают, она становится близкой к пороговой частоте вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя. Таким образом, при коррекции частоты вращения двигателя до уменьшенной целевой частоты вращения двигателя при помощи управления скоростью холостого хода двигателя могут возникать помехи, воздействующие на ведущие колеса в таком направлении, что они могут остановить их вращение. Например, внешняя сила (сила трения и т.п.), прилагаемая со стороны поверхности дороги к ведущим колесам, может действовать в направлении, противоположном направлению вращения ведущих колес. Когда помеха воздействует на ведущие колеса, частота вращения двигателя может снижаться ниже пороговой частоты вращения двигателя. В таком случае, когда частота вращения двигателя становится ниже, чем пороговая частота вращения двигателя, вызывается быстрое повышение частоты вращения двигателя действием управления предотвращением уменьшения частоты вращения двигателя для исключения остановки двигателя внутреннего сгорания. Таким образом, движущая сила, прилагаемая к ведущим колесам, основанная на частоте вращения двигателя, становится большей, чем тормозная сила. В результате становится трудно быстро остановить транспортное средство после движения.
Сущность изобретения
Изобретение обеспечивает получение устройства управления и способа управления для двигателя внутреннего сгорания, установленного на транспортном средстве, которое сдерживает управление предотвращением снижения частоты вращения двигателя, реагируя на снижение целевой частоты вращения двигателя при остановке транспортного средства после движения, и которое предотвращает затруднение быстрой остановки транспортного средства в результате быстрого увеличения частоты вращения двигателя из-за выполнения управления предотвращением уменьшения частоты вращения двигателя.
В устройстве управления для двигателя внутреннего сгорания, согласно первому объекту изобретения, управление скоростью холостого хода двигателя для регулирования частоты вращения двигателя до целевой частоты вращения двигателя, заданной в соответствии с рабочим состоянием двигателя, и управление предотвращением уменьшения частоты вращения двигателя для быстрого увеличения частоты вращения двигателя для исключения остановки двигателя внутреннего сгорания, когда частота вращения двигателя равна или ниже, чем пороговая частота вращения двигателя, которая ниже, чем целевая частота вращения двигателя, осуществляются в течение работы на холостом ходу двигателя внутреннего сгорания, и целевая частота вращения двигателя для управления холостым ходом двигателя снижается, когда скорость транспортного средства равна или ниже, чем заданная скорость транспортного средства, для переключения двигателя внутреннего сгорания на работу на холостом ходу при остановке транспортного средства после движения. Устройство управления включает средство определения для определения того, движется ли транспортное средство по поверхности дороги с низким коэффициентом трения, и средство снижения частоты вращения двигателя для снижения целевой частоты вращения двигателя в момент переключения двигателя внутреннего сгорания на работу на холостом ходу в процессе остановки транспортного средства после движения и снижения пороговой частоты вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя, только если транспортное средство движется по поверхности дороги с низким коэффициентом трения.
Если скорость транспортного средства равна или ниже, чем заданная скорость транспортного средства для переключения двигателя внутреннего сгорания, установленного на транспортном средстве, на работу на холостом ходу в процессе остановки транспортного средства после движения, когда целевая частота вращения двигателя для управления холостым ходом двигателя снижается, частота вращения двигателя, таким образом, снижается. В этом состоянии, если существуют помехи, воздействующие на ведущие колеса транспортного средства в таком направлении, что они могут остановить их вращение, например, когда внешняя сила прилагается со стороны поверхности дороги к ведущим колесам в направлении, противоположном направлению их вращения, частота вращения двигателя, таким образом, снижается и приближается к пороговой частоте вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя.
Согласно указанной выше конфигурации, если переключение работы двигателя на работу на холостом ходу выполнено в процессе остановки транспортного средства после движения, целевая частота вращения двигателя для управления холостым ходом двигателя снижается, и пороговая частота вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя также снижается соответственно, только если транспортное средство движется по поверхности дороги с низким коэффициентом трения. Таким образом, ограничивается уменьшение частоты вращения двигателя из-за помех, воздействующих на ведущие колеса, и она становится равной или меньшей, чем пороговая частота вращения двигателя. Это происходит по следующим причинам [1] и [2].
[1] На поверхности дороги с низким коэффициентом трения существует меньше помех, воздействующих на ведущие колеса в направлении остановки их вращения. Например, на поверхности дороги с низким коэффициентом трения относительно малая внешняя сила (относительно малая сила трения и т.п.) прилагается со стороны поверхности дороги к ведущим колесам в направлении, противоположном направлению их вращения. Таким образом, частота вращения двигателя снижается на относительно малую величину из-за помех.
[2] Даже если частота вращения двигателя снижается из-за воздействия помех на ведущие колеса в направлении остановки их вращения, пороговая частота вращения снижается. Таким образом, маловероятно снижение частоты вращения двигателя ниже пороговой частоты вращения двигателя. Даже если пороговая частота вращения двигателя снижена, как описано выше, это снижение осуществляется только на поверхности дороги с низким коэффициентом трения, где частота вращения двигателя снижается на относительно малую величину из-за воздействия помех на ведущие колеса, как описано в разделе [1]. Таким образом, снижение частоты вращения двигателя не вызывает остановку двигателя внутреннего сгорания.
Как описано выше, целевая частота вращения двигателя снижается в процессе остановки транспортного средства после движения, и пороговая частота вращения двигателя снижается соответственно, если транспортное средство движется по дороге с низким коэффициентом трения. Таким образом, осуществление управления предотвращением уменьшения частоты вращения двигателя сдерживается, поскольку целевая частота вращения двигателя снижена. Соответственно, быстрое увеличение частоты вращения двигателя из-за выполнения управления предотвращением уменьшения частоты вращения двигателя, которое затрудняло бы остановку автомобиля, может быть предотвращено. Кроме того, предотвращается остановка двигателя внутреннего сгорания в результате сдерживания осуществления управления предотвращением уменьшения частоты вращения.
Согласно первому объекту изобретения целевая частота вращения может постепенно снижаться, когда скорость транспортного средства становится равной или ниже, чем заданная величина, для выполнения переключения двигателя внутреннего сгорания, установленного на транспортном средстве, на работу на холостом ходу в процессе остановки транспортного средства после движения, и снижающее средство может постепенно снижать пороговую частоту вращения в соответствии со снижением целевой частоты вращения.
Когда переключение работы двигателя на работу на холостом ходу осуществляется в процессе остановки транспортного средства после движения, целевая частота вращения для управления скоростью холостого хода постепенно снижается с целью, например, сдерживания ухудшения долговечности компонентов в результате быстрого снижения частоты вращения двигателя и сдерживания провала частоты вращения двигателя относительно целевой частоты вращения. Если снижение пороговой частоты вращения для управления предотвращением снижения частоты вращения быстро осуществляется при начале этого постепенного снижения целевой частоты вращения, пороговая частота вращения, в таком случае, задается намного ниже, чем целевая частота вращения. Когда частота вращения двигателя быстро снижается в такой ситуации, может быть вызвано неудобство быстрого повышения частоты вращения двигателя из-за управления предотвращением снижения частоты вращения. То есть, когда частота вращения двигателя становится равной или ниже, чем пороговая частота вращения, которая была задана намного меньшей, чем целевая частота вращения, вследствие быстрого снижения частоты вращения двигателя, быстрое повышение частоты вращения двигателя не может быть осуществлено, несмотря на попытку быстрого повышения частоты вращения двигателя благодаря выполнению управления предотвращением снижения частоты вращения. В результате может быть вызвана остановка двигателя внутреннего сгорания.
Согласно предшествующей конфигурации, когда целевая частота вращения постепенно снижается в соответствии с переключением на холостой ход в процессе остановки транспортного средства после движения, пороговая частота вращения также постепенно снижается соответственно. Таким образом, возникновение неудобства может исключаться. То есть, когда частота вращения двигателя быстро снижается в ситуации, когда целевая частота вращения постепенно снижается, снижение частоты вращения двигателя до величины, равной или ниже, чем пороговая частота вращения, которая постепенно снижается, когда целевая частота вращения снижается, происходит в более ранний момент времени. Таким образом, управление предотвращением снижения частоты вращения быстро выполняется для быстрого повышения частоты вращения двигателя. Частота вращения двигателя, таким образом, быстро повышается благодаря управлению предотвращением снижения частоты вращения в более ранний момент времени, когда частота вращения двигателя быстро снижается. Таким образом, возникновение неудобства, а именно возможной остановки двигателя внутреннего сгорания в результате неспособности осуществлять быстрое повышение частоты вращения двигателя, исключается.
Согласно первому объекту изобретения целевая частота вращения может быть восстановлена до ее величины до снижения после снижения в течение работы на холостом ходу в процессе остановки транспортного средства после движения в условиях, когда транспортное средство останавливается после движения, и средство снижения может восстанавливать сниженную пороговую частоту вращения до ее величины до снижения на основе восстановления целевой частоты вращения до ее величины до снижения.
Если целевая частота вращения для управления скоростью холостого хода и пороговая частота вращения для управления предотвращением снижения частоты вращения не восстанавливаются до их величин до снижения, соответственно, после того, как транспортное средство останавливается после движения, могут возникнуть ситуация, когда частота вращения двигателя снижается сопротивлением вращению двигателя внутреннего сгорания и т.п., и ситуация, когда частота вращения двигателя, таким образом, становится равной или ниже, чем пороговая частота вращения, и не может быть быстро повышена, несмотря на осуществление управления предотвращением снижения вращения.
Согласно предшествующей конфигурации целевая частота вращения восстанавливается до ее величины до снижения в условиях, когда транспортное средство останавливается после движения, и пороговая частота вращения также восстанавливается до ее величины до снижения на основе восстановления целевой частоты вращения. Таким образом, возникновение неудобства может быть исключено. То есть частота вращения двигателя может не снижаться вследствие сопротивления вращению двигателя внутреннего сгорания и т.п. благодаря восстановлению целевой частоты вращения до ее величины до снижения. Кроме того, когда частота вращения двигателя становится равной или ниже, чем пороговая частота вращения, вследствие восстановления пороговой частоты вращения до ее величины до снижения, и осуществляется управление предотвращением снижения частоты вращения, осуществление этого управления происходит в состоянии, когда частота вращения двигателя высокая. Соответственно, возникновение ситуации, когда частота вращения двигателя не может быть быстро повышена несмотря на осуществление управления, может быть исключено.
Кроме того, целевая частота вращения может быть постепенно восстановлена до ее величины до снижения, и средство снижения может постепенно восстанавливать пороговую частоту вращения до ее величины до снижения в соответствии с восстановлением целевой частоты вращения до ее величины до снижения.
После того как транспортное средство останавливается после движения, целевая частота вращения для управления скоростью холостого хода постепенно восстанавливается до ее величины до снижения с целью, например, сдерживания провала частоты вращения двигателя относительно целевой частоты вращения. Если восстановление пороговой частоты вращения для управления предотвращением снижения частоты вращения до ее величины до снижения быстро выполняется после завершения восстановления целевой частоты вращения, которая постепенно восстанавливается, как описано выше, пороговая частота вращения делается намного ниже, чем целевая частота вращения, пока восстановление пороговой частоты вращения не будет начато после начала восстановления целевой частоты вращения. В этой ситуации, когда нагрузка привода вспомогательных устройств в двигателе внутреннего сгорания увеличивается в результате увеличения требуемого привода для вспомогательных устройств, которые приводятся двигателем внутреннего сгорания, и частота вращения двигателя, таким образом, быстро снижается, может быть вызвано неудобство относительно быстрого повышения частоты вращения двигателя из-за управления предотвращением снижения частоты вращения. То есть, когда частота вращения двигателя становится равной или ниже, чем пороговая частота вращения, которая была сделана намного ниже, чем целевая частота вращения, вследствие быстрого снижения частоты вращения двигателя, быстрое повышение частоты вращения двигателя не может быть осуществлено вследствие чрезмерно быстрого снижения частоты вращения двигателя, несмотря на попытку быстрого повышения частоты вращения двигателя при помощи осуществления управления предотвращением снижения частоты вращения. В результате может быть вызвана остановка двигателя внутреннего сгорания.
Согласно предшествующей конфигурации, когда целевая частота вращения постепенно восстанавливается до ее величины до снижения в результате завершения остановки транспортного средства после движения, пороговая частота вращения также постепенно восстанавливается до ее величины до снижения в соответствии с началом восстановления целевой частоты вращения. Таким образом, возникновение неудобства может быть исключено. То есть, когда величина требуемого привода для вспомогательного устройства, приводимого двигателем внутреннего сгорания, увеличивается, нагрузка привода вспомогательного устройства в двигателе увеличивается, и частота вращения двигателя, таким образом, быстро снижается в ситуации, когда целевая частота вращения постепенно восстанавливается до ее величины до снижения, и частота вращения двигателя снижается в более ранний момент времени до величины, равной или ниже, чем пороговая частота вращения двигателя, которая постепенно восстанавливается до ее величины до снижения, когда целевая частота вращения двигателя восстанавливается. Таким образом, управление предотвращением уменьшения частоты вращения двигателя быстро выполняется для быстрого увеличения частоты вращения двигателя. Частота вращения двигателя, таким образом, быстро увеличивается благодаря выполнению управления предотвращением уменьшения частоты вращения двигателя в более ранний момент времени, когда частота вращения двигателя быстро снижается. Таким образом, неспособность быстро увеличивать частоту вращения двигателя менее вероятно вызовет остановку двигателя.
Кроме того, средство снижения частоты вращения двигателя может задавать величину, полученную посредством вычитания некоторой заданной величины из целевой частоты вращения как пороговой частоты вращения двигателя.
Согласно вышеупомянутой описанной конфигурации, величина, полученная посредством вычитания некоторой заданной величины из целевой частоты вращения двигателя, задается как пороговая частота вращения двигателя. Таким образом, если целевая частота вращения двигателя постепенно снижается при переключении работы двигателя на работу на холостом ходу в процессе остановки транспортного средства после движения, пороговая частота вращения двигателя также соответственно и постепенно снижается в соответствии с постепенным снижением целевой скорости. Кроме того, когда целевая частота вращения двигателя постепенно восстанавливается до ее величины до снижения после того, как транспортное средство останавливается после движения, пороговая частота вращения двигателя также соответственно и постепенно восстанавливается до ее величины до снижения в соответствии с постепенным восстановлением целевой частоты вращения двигателя.
Согласно первому объекту изобретения средство снижения частоты вращения двигателя может сравнивать сниженную пороговую частоту вращения двигателя с частотой вращения двигателя нижнего предела, которая является величиной, соответствующей минимальной частоте вращения двигателя, при которой двигатель внутреннего сгорания может автономно работать, и использовать частоту вращения нижнего предела как пороговую частоту вращения, когда пороговая частота вращения ниже, чем частота вращения нижнего предела. Кроме того, средство снижения частоты вращения двигателя может переменно задавать частоту вращения двигателя нижнего предела на основе температуры двигателя.
Согласно предшествующей конфигурации, даже если пороговая частота вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя снижена, когда целевая частота вращения двигателя для управления холостым ходом двигателя снижена, когда двигатель переключается на работу на холостом ходу в процессе остановки транспортного средства после движения, снижение пороговой частоты вращения двигателя происходят только до частоты вращения двигателя нижнего предела как минимальной частоты вращения, при которой двигатель внутреннего сгорания может автономно работать. Таким образом, когда частота вращения двигателя снижается до величины, равной или ниже, чем пороговая частота вращения двигателя в соответствии со снижением целевой частоты вращения двигателя, и управление предотвращением уменьшения частоты вращения двигателя выполняется, возникновение неудобства, а именно остановки двигателя внутреннего сгорания в результате неспособности осуществлять быстрое увеличение частоты вращения двигателя при помощи управления, может надлежащим образом исключаться.
Согласно способу управления для двигателя внутреннего сгорания, установленного на транспортном средстве, согласно второму объекту изобретения осуществляются управление холостым ходом двигателя для коррекции частоты вращения двигателя до целевой частоты вращения двигателя, заданной в соответствии с рабочим состоянием двигателя, и управление предотвращением уменьшения частоты вращения двигателя для быстрого увеличения частоты вращения двигателя для исключения остановки двигателя внутреннего сгорания, когда частота вращения двигателя равна или ниже, чем пороговая частота вращения двигателя, которая ниже, чем целевая частота вращения двигателя, в течение работы на холостом ходу двигателя внутреннего сгорания, и целевая частота вращения двигателя для управления холостым ходом двигателя снижается, когда скорость транспортного средства равна или ниже, чем заданная величина, для переключения двигателя внутреннего сгорания на работу на холостом ходу при остановке транспортного средства после движения. Способ управления включает определение, движется ли транспортное средство по дороге с низким коэффициентом трения, и снижение целевой частоты вращения двигателя при переключении двигателя внутреннего сгорания на работу на холостом ходу в процессе остановки транспортного средства после движения, и снижение пороговой частоты вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя, когда транспортное средство движется по поверхности дороги с низким коэффициентом трения.
Краткое описание чертежей
Предшествующие и дальнейшие признаки и преимущества изобретения станут очевидными из нижеследующего описания типичных вариантов осуществления изобретения со ссылками на прилагаемые чертежи, на которых используются одинаковые ссылочные позиции для обозначения идентичных элементов и на которых:
фиг.1 - принципиальная схема, показывающая двигатель, оборудованный устройством управления согласно первому варианту осуществления изобретения;
фиг.2A-2E - временные диаграммы, соответственно показывающие изменения скорости транспортного средства, частоты вращения двигателя и режим осуществления управления предотвращением уменьшения частоты вращения двигателя при остановке автомобиля после движения;
фиг.3 - блок-схема, показывающая процедуру выполнения обработки для улучшения остановочной способности автомобиля для быстрой остановки автомобиля после движения;
фиг.4A-4E - временные диаграммы, соответственно показывающие изменения скорости транспортного средства, изменения частоты вращения двигателя и режим осуществления управления предотвращением снижения частоты вращения в процессе остановки автомобиля после движения во втором варианте осуществления изобретения;
фиг.5А-5E - временные диаграммы, соответственно показывающие изменения скорости транспортного средства, изменения частоты вращения двигателя и режим осуществления управления предотвращением снижения частоты вращения в процессе остановки автомобиля после движения во втором варианте осуществления изобретения; и
фиг.6A-6E - временные диаграммы, соответственно показывающие изменения скорости транспортного средства, изменения частоты вращения двигателя и режим осуществления управления предотвращением снижения частоты вращения в процессе остановки автомобиля после движения в третьем варианте осуществления изобретения.
Подробное описание вариантов осуществления изобретения
Первый вариант конструкции, в котором изобретение применено для двигателя, установленного на автомобиле с задним приводом, будет описан далее со ссылками на фиг.1-3.
В двигателе 1, показанном на фиг.1, воздух всасывается через впускной коллектор 4 в камеру 3 сгорания, и топливо в количестве, соответствующем количеству всасываемого воздуха, впрыскивается инжекционным клапаном 2 и подается в камеру 3 сгорания. Таким образом, когда количество всасываемого воздуха увеличивается посредством регулирования степени открывания дроссельной заслонки 12, расположенной во впускном коллекторе 4, увеличивается количество смеси, сгорающей в камере 3 сгорания, и увеличивается выходная мощность двигателя. Коленчатый вал 9 двигателя 1 соединен с ведущими колесами (задними колесами) 6 автомобиля через цепь привода, включающую трансмиссию 5, такую как автоматическая трансмиссия и т.п. Тормоз 23 прилагает тормозную силу к ведущим колесам 6 для остановки вращения ведущих колес 6. Кроме того, различное вспомогательное оборудование, такое как генератор 7 переменного тока, компрессор для кондиционера и т.п., также соединено с коленчатым валом 9.
Генератор 7 переменного тока представляет собой одно из различных вспомогательных устройств, которые приводятся двигателем 1, и имеет электрическое соединение с батареей 21 через блок 8 управления мощностью, и работа генератора 7 переменного тока управляется блоком 8 управления мощностью. Генератор 7 переменного тока производит энергию, когда коленчатый вал 9 вращается. Произведенная энергия переменного тока преобразуется в энергию постоянного тока при помощи блока 8 управления мощностью и накапливается батареей 21. В этот момент количество генерируемой энергии (коэффициент привода генератора 7 переменного тока) регулируется посредством регулирования напряжения, прилагаемого к возбуждающей катушке ротора генератора 7 переменного тока через блок 8 управления мощностью.
Различные электрические компоненты, установленные на автомобиле, снабжаются энергией посредством генерирования энергии генератором 7 переменного тока. То есть различные электрические компоненты автомобиля снабжаются энергией от генератора 7 переменного тока и батареи 21 через блок 8 управления мощностью и приводятся в действие на основе, таким образом, подаваемой энергии. Различные электрические компоненты автомобиля могут включать множество (два в этом первом варианте осуществления изобретения) водонагревателей 22, которые питаются энергией/нагреваются, для нагревания хладагента для двигателя 1, когда хладагент находится в очень охлажденном состоянии, электродвигатель для устройства рулевого привода с усилителем, нагревательный элемент для окон и т.п.
Автомобиль оборудован электронным управляющим блоком 20, который выполняет различные функции управления относительно двигателя 1, трансмиссии 5 и т.п. Электронный управляющий блок 20 конфигурирован с центральным процессором для выполнения различных процессов относительно различных операций управления, ПЗУ, в котором хранятся программы и данные, заданные для различных средств управления, ОЗУ, в котором временно хранятся результаты вычислений центрального процессора и т.п., портами ввода/вывода для ввода/вывода сигналов извне/наружу и т.п.
Различные датчики, которые будут описаны ниже, соединены с портом ввода электронного управляющего блока 20. Датчики могут включать датчик 15 положения педали акселератора для определения величины нажима на педаль 14 управления подачей топлива (величины нажима на педаль акселератора), которой оперирует водитель автомобиля, датчик 16 положения дроссельной заслонки для определения степени открывания дроссельной заслонки 12 (степени открывания дроссельной заслонки), расходомер 13 воздуха для определения расхода воздуха, который всасывается в камеру 3 сгорания через впускной коллектор 4 (расхода всасываемого воздуха), датчик 10 положения кривошипа, который выдает сигнал, обозначающий вращение коленчатого вала 9 как выходного вала двигателя 1, датчик 11 температуры охлаждающей жидкости для определения температуры хладагента для двигателя 1 и датчик 17 скорости транспортного средства, который определяет скорость транспортного средства. Кроме того, схемы управления для инжекторного клапана 2, дроссельной заслонки 12 и т.п. соединены с портом вывода электронного управляющего блока 20.
Электронный управляющий блок 20 выдает сигнал управления в каждую из схем управления для соответствующих компонентов, которые соединены с портом вывода, в соответствии с рабочим состоянием двигателя, оцененным на основе сигналов определения, входящих от соответствующих датчиков. Электронный управляющий блок 20, таким образом, выполняет различные функции управления, такие как управление количеством топлива, впрыскиваемого инжекторным клапаном 2, управление степенью открывания дроссельной заслонки 12, управление включением водонагревателей 22, управление работой генератора 7 переменного тока (блоком 8 управления мощностью) и т.п.
Далее будет подробно описано управление степенью открывания дроссельной заслонки 12 электронным блоком 20 управления. Степень открывания дроссельной заслонки 12 регулируется на основе значения TAt команды степени открывания дроссельной заслонки при помощи электронного управляющего блока 20. Значение TAt команды степени открывания дроссельной заслонки вычисляется с использованием выражения (1), показанного ниже.
TAt=TAbase+Qcal·kt(1);
TAbase: базовая степень открывания дроссельной заслонки;
Qcal: величина коррекции управления холостым ходом;
kt: коэффициент преобразования.
В выражении (1) базовая степень TAbase открывания дроссельной заслонки вычислена на основе величины нажима на педаль акселератора, вычисленной на основе сигнала определения от датчика 15 положения акселератора, частоты вращения двигателя, вычисленной на основе сигнала определения от датчика 10 положения кривошипа и т.п. Базовая степень TAbase открывания дроссельной заслонки установлена на "0", когда двигатель 1 работает на холостом ходу. Член "Qcal·kt" в выражении (1) применен для выполнения управления холостым ходом двигателя, а именно управления частотой вращения двигателя в течение работы на холостом ходу.
Значение TAt команды степени открывания дроссельной заслонки в течение работы на холостом ходу определено членом "Qcal·kt", когда базовая степень TAbase открывания дроссельной заслонки равна "0". В этом члене "Qcal·kt" величина Qcal коррекции управления холостым ходом представляет собой безразмерный параметр, который увеличивается/уменьшается для регулирования частоты вращения двигателя в течение управления холостым ходом двигателя, и коэффициент kt преобразования служит для преобразования значения Qcal коррекции управления холостым ходом в степень открывания дроссельной заслонки. В управлении холостым ходом двигателя значение Qcal коррекции управления холостым ходом увеличивается/уменьшается на основе девиации частоты вращения двигателя от заданной целевой частоты вращения двигателя для обеспечения того, что частота вращения двигателя приближается к целевой частоте вращения двигателя.
То есть, если частота вращения двигателя ниже целевой частоты вращения двигателя, значение Qcal коррекции управления холостым ходом увеличивается для увеличения степени открывания дроссельной заслонки 12. Если степень открывания дроссельной заслонки 12, таким образом, увеличена для увеличения количества всасываемого воздуха в двигатель 1, количество впрыскиваемого топлива увеличивается соответственно и частота вращения двигателя приближается к увеличенной целевой частоте вращения двигателя. Кроме того, если частота вращения двигателя более высокая, чем целевая частота вращения двигателя, значение Qcal коррекции управления холостым ходом снижается для уменьшения степени открывания дроссельной заслонки 12. Когда степень открывания дроссельной заслонки 12, таким образом, снижена для снижения количества всасываемого воздуха в двигатель 1, количество впрыскиваемого топлива снижается соответственно и частота вращения двигателя приближается к уменьшенной целевой частоте вращения двигателя.
Частота вращения двигателя на холостом ходу корректируется до целевой частоты вращения двигателя посредством выполнения управления частотой вращения холостого хода двигателя, как описано выше. Кроме того, целевая частота вращения двигателя для управления холостым ходом двигателя является величиной, переменно задаваемой в соответствии с температурой хладагента для двигателя 1, величиной потребностей привода для различных вспомогательных устройств, которые приводятся в действие двигателем 1, и т.п. Например, целевая частота вращения двигателя увеличивается с увеличением величины потребности привода для каждого из вспомогательных устройств и наоборот снижается с уменьшением величины потребности привода. Это связано с исключением остановки двигателя при работе на холостом ходу в результате сопротивления вращению, воздействующего на двигатель 1 при обеспечении привода для каждого вспомогательного устройства, которое увеличивается, когда величина потребности привода для каждого из вспомогательных устройств увеличивается. Кроме того, целевая частота вращения двигателя увеличивается, когда температура хладагента для двигателя 1 (соответствующая температуре двигателя) уменьшается. Напротив, целевая частота вращения двигателя снижается, когда температура хладагента увеличивается. Это происходит с целью исключения остановки двигателя 1 в течение работы на холостом ходу в результате увеличения сопротивления вращению, производимому смазочным маслом для двигателя 1, вязкость которого увеличивается, когда температура хладагента уменьшается и когда температура смазочного масла для двигателя 1 уменьшается.
Кроме того, в течение работы двигателя 1 на холостом ходу осуществляется управление предотвращением уменьшения частоты вращения двигателя с целью исключения ситуации, когда частота вращения двигателя не может поддерживаться на уровне целевой частоты вращения двигателя, несмотря на выполнение управления частотой вращения холостого хода двигателя, и снижается, вызывая остановку двигателя 1. В ходе управления предотвращением уменьшения частоты вращения двигателя определяется, равна ли частота вращения двигателя или ниже, чем пороговая частота вращения двигателя, как величина ниже, чем целевая частота вращения двигателя для управления холостым ходом двигателя, и частота вращения двигателя быстро увеличивается, когда частота вращения двигателя равна или ниже пороговой частоты вращения двигателя. Более конкретно, если частота вращения двигателя равна или ниже пороговой частоты вращения двигателя, величина, полученная посредством прибавления заданной величины b увеличения к значению TAt команды степени открывания дроссельной заслонки, задается как новое значение TAt команды степени открывания дроссельной заслонки, как показано выражением (2), показанным ниже. Значение TAt команды степени открывания дроссельной заслонки, таким образом, быстро увеличивается.
TAt←TAt+b (2)
Когда значение TAt команды степени открывания дроссельной заслонки, таким образом, быстро увеличивается, степень открывания дроссельной заслонки 12 также быстро увеличивается. Когда степень открывания дроссельной заслонки 12, таким образом, увеличена для увеличения количества всасываемого воздуха, который всасывается в двигатель 1, количество впрыскиваемого топлива увеличивается соответственно. В результате частота вращения двигателя быстро увеличивается для исключения остановки двигателя 1. После того как частота вращения двигателя быстро увеличивается при помощи управления предотвращением уменьшения частоты вращения двигателя, например, после того как частота вращения двигателя равна или выше пороговой частоты вращения двигателя, значение TAt команды степени открывания дроссельной заслонки вычисляется на основе выражения (1) и степень открывания дроссельной заслонки 12 устанавливается на уровне нормального значения. Управление предотвращением уменьшения частоты вращения двигателя, таким образом, прекращается.
Далее, управление частотой вращения холостого хода двигателя и управление предотвращением уменьшения частоты вращения двигателя, выполняемые в процессе остановки автомобиля после движения, будут описаны со ссылками на временные диаграммы, показанные на фиг.2A-2E. В процессе остановки автомобиля после движения вследствие действия тормозов 23 или подобных средств, если скорость транспортного средства равна или ниже заданной величины a, которая близка к "0", для переключения двигателя 1 на работу на холостом ходу (в момент Т1 времени), как показано на фиг.2A, осуществляется управление частотой вращения холостого хода двигателя. Если осуществляется управление частотой вращения холостого хода двигателя, целевая частота вращения двигателя для управления холостым ходом двигателя задается выше, например, когда температура хладагента для двигателя 1 (соответствующая температуре двигателя) низкая, и вязкость смазочного масла для двигателя 1 высокая, чем в таком случае, когда температура хладагента высокая и, следовательно, вязкость смазочного масла низкая.
Если частота вращения двигателя в течение работы на холостом ходу установлена высокой в результате низкой температуры хладагента для двигателя 1, как описано выше, в течение переключения на работу на холостом ходу, движущая сила, прилагаемая к ведущим колесам 6 автомобиля, в этот момент увеличивается. В результате, даже если тормозная сила прилагается к ведущим колесам 6 тормозом 23, частота вращения ведущих колес 6 маловероятно будет уменьшена, и остановка автомобиля после движения занимает более продолжительное время. В частности, если частота вращения двигателя настолько высока в течение переключения на работу на холостом ходу, что движущая сила, прилагаемая к ведущим колесам 6, превышает максимальную величину тормозной силы, прилагаемой к ведущим колесам 6 тормозом 23, неудобство более заметно. То есть требуется больше времени для остановки автомобиля после движения.
Для решения этой проблемы, когда целевая частота вращения двигателя для управления холостым ходом двигателя высока в течение переключения на работу на холостом ходу, целевая частота вращения двигателя принудительно снижается. Определяется, высока ли целевая частота вращения двигателя, на основе того, равна ли целевая частота вращения двигателя заданной пороговой частоте вращения двигателя или выше ее. Можно установить пороговую частоту вращения двигателя на такое значение, чтобы движущая сила, прилагаемая к ведущим колесам 6 на основе частоты вращения двигателя, являлась равной или превышала максимальную величину тормозной силы, прилагаемой к ведущим колесам 6 тормозом 23, когда частота вращения двигателя скорректирована до пороговой частоты вращения двигателя. В таком случае, если целевая частота вращения двигателя равна или выше пороговой частоты вращения двигателя, определяется, что целевая частота вращения двигателя является высокой и, таким образом, необходимо принудительно снижать целевую частоту вращения двигателя.
Кроме того, можно принудительно снижать целевую частоту вращения двигателя, например, следующим образом. То есть величина снижения целевой частоты вращения двигателя, необходимого для того, чтобы сделать целевую частоту вращения двигателя равной или меньшей, чем пороговая частота вращения двигателя, вычисляется на основе целевой частоты вращения двигателя и пороговой частоты вращения двигателя, и целевая частота вращения двигателя снижается на величину снижения. Снижение целевой частоты вращения двигателя на величину снижения выполняется постепенно с целью, например, минимизации порчи компонентов двигателя 1 в результате быстрого снижения частоты вращения двигателя и сдерживания провала частоты вращения двигателя относительно целевой частоты вращения двигателя. Вследствие предшествующей процедуры, когда целевая частота вращения двигателя принудительно снижается на величину снижения в течение переключения двигателя 1 на работу на холостом ходу (T1), снижение целевой частоты вращения двигателя осуществляется как обозначено, например, прерывистыми линиями на фиг.2B.
Как описано выше, когда двигатель 1 переключается на работу на холостом ходу при остановке автомобиля после движения (T1), автомобиль быстро останавливается после движения посредством принудительного снижения целевой частоты вращения двигателя для управления скоростью холостого хода. Однако если принудительное снижение целевой частоты вращения двигателя выполнено, целевая частота вращения двигателя (обозначена прерывистыми линиями на фиг.2B) приближается к пороговой частоте вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя (обозначена чередующимися длинной и двумя короткими прерывистыми линиями на фиг.2B). Таким образом, если существуют помехи, воздействующие на ведущие колеса 6 в направлении остановки их вращения, например, когда внешняя сила (сила трения и т.п.) со стороны поверхности дороги прилагается к ведущим колесам 6 в направлении, противоположном направлению их вращения при коррекции частоты вращения двигателя до уменьшенной целевой частоты вращения двигателя, при помощи управления частотой вращения холостого хода двигателя частота вращения двигателя может, таким образом, снижаться ниже пороговой частоты вращения двигателя. В таком случае, если частота вращения двигателя снижена ниже пороговой частоты вращения двигателя (в момент Т2 времени), управление предотвращением уменьшения частоты вращения двигателя осуществляется, как показано на фиг.2C. Частота вращения двигателя быстро увеличивается при помощи управления предотвращением уменьшения частоты вращения двигателя, как обозначено сплошной линией на фиг.2B. Таким образом, движущая сила, прилагаемая к ведущим колесам 6 на основе частоты вращения двигателя, превышает тормозную силу, прилагаемую к ведущим колесам 6 тормозом 23. В результате снижение скорости транспортного средства до "0" задерживается, как обозначено чередующимися длинной и двумя короткими прерывистыми линиями на фиг.2A, и становится трудно быстро остановить автомобиль после движения.
Таким образом, в первом варианте осуществления изобретения, когда двигатель 1 переключается на работу на холостом ходу в процессе остановки автомобиля после движения (T1), целевая частота вращения двигателя для управления холостым ходом двигателя снижается, и пороговая частота вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя снижается только в условиях, когда автомобиль движется по поверхности дороги с низким коэффициентом трения. Более конкретно, если автомобиль движется по поверхности дороги с низким коэффициентом трения и целевая частота вращения двигателя равна или выше, чем пороговая частота вращения двигателя в момент времени T1 на фиг.2, снижение целевой частоты вращения двигателя на величину снижения осуществляется, как обозначено прерывистыми линиями на фиг.2D, и пороговая частота вращения двигателя также снижается соответственно, как обозначено чередующимися длинной и двумя короткими прерывистыми линиями на фиг.2D.
Таким образом, когда снижение частоты вращения двигателя происходит, когда целевая частота вращения двигателя снижается (как обозначено прерывистыми линиями), уменьшение частоты вращения двигателя вследствие воздействия помех на ведущие колеса 6 сдерживается, и она становится равной или ниже пороговой частоты вращения двигателя (как обозначено чередующимися длинной и двумя короткими прерывистыми линиями). Это основано на двух причинах, описанных ниже в разделах [1] и [2].
[1] На поверхности дороги с низким коэффициентом трения существует меньшее сопротивление, воздействующее на ведущие колеса 6 в направлении остановки их вращения. Например, относительно малое сопротивление со стороны поверхности дороги прилагается к ведущим колесам 6 в направлении, противоположном направлению их вращения. Таким образом, частота вращения двигателя снижается на относительно малую величину из-за помех.
[2] Даже если частота вращения двигателя снижена вследствие помех, воздействующих на ведущие колеса 6 в направлении остановки их вращения, пороговая частота вращения двигателя снижается, как обозначено чередующимися длинной и двумя короткими прерывистыми линиями на фиг.2D. Таким образом, маловероятно, что частота вращения двигателя (сплошная линия) будет уменьшена ниже пороговой частоты вращения двигателя. Даже когда пороговая частота вращения двигателя (как обозначено чередующимися длинной и двумя короткими прерывистыми линиями) снижена, как описано выше, это снижение осуществляется только на поверхности дороги с низким коэффициентом трения, где частота вращения двигателя снижается на относительно малую величину из-за воздействия помех на ведущие колеса 6, как описано выше в разделе [1]. Таким образом, снижение частоты вращения двигателя не вызывает остановки двигателя 1.
Как описано выше, целевая частота вращения двигателя снижается в процессе остановки автомобиля после движения, и пороговая частота вращения двигателя снижается соответственно при условии, что автомобиль движется по поверхности дороги с низким коэффициентом трения. Выполнение управления предотвращением уменьшения частоты вращения двигателя приостанавливается, когда целевая частота вращения двигателя снижается, как показано на фиг.2E. Соответственно, автомобиль может быть быстро остановлен без помех от быстрого увеличения частоты вращения двигателя (как обозначено сплошной линией на фиг.2B) вследствие выполнения управления предотвращением уменьшения частоты вращения двигателя. В этом случае частота вращения двигателя не падает до степени, когда двигатель 1 может остановиться, но изменяется, как обозначено, например, сплошной линией на фиг.2D, и может быть скорректирована до целевой частоты вращения двигателя (как обозначено прерывистыми линиями).
Далее выполнение процесса быстрой остановки автомобиля после движения будет описано подробно со ссылками на блок-схему, показанную на фиг.3, которая показывает программу усовершенствования остановочной способности. В этой программе переход к этапу S103 осуществляется, если скорость транспортного средства больше 0 и равна или ниже заданной величины, и когда двигатель 1 работает на холостом ходу при нажиме на педаль акселератора, равном "0" (ДА и в ходе этапа S101 и в ходе этапа S102), другими словами, в условиях, когда двигатель 1 был переключен на работу на холостом ходу в процессе остановки автомобиля после движения.
В ходе этапа S103 на основе информации о поверхности дороги, хранящейся в ОЗУ электронного управляющего блока 20, определяется, движется ли автомобиль по поверхности дороги с низким коэффициентом трения. Информация о поверхности дороги накапливается в ОЗУ согласно, например, способу описанному ниже. То есть относительное ускорение как теоретическое ускорение на стандартной поверхности дороги вычисляется относительно степени открывания дроссельной заслонки, скорости транспортного средства, передаточного числа и т.п. в ходе ускорения автомобиля. Если фактическое ускорение ниже контрольного ускорения на величину, равную или большую, чем заданное пороговое значение, осуществляется определение того, что автомобиль в настоящее время движется по поверхности дороги с низким коэффициентом трения, и эта информация сохраняется в ОЗУ. В альтернативном варианте можно принять способ, включающий этапы вычисления разности между угловой скоростью ведущих колес 6 и угловой скоростью ведомых колес в ходе ускорения автомобиля, предусматривая, что автомобиль в настоящее время движется по поверхности дороги с низким коэффициентом трения, если разность равна или больше, чем заданное пороговое значение, и сохранять информацию в ОЗУ.
Если в ходе этапа S103 определено, что автомобиль движется по поверхности дороги с низким коэффициентом трения, осуществляется процесс (S104) уменьшения целевой частоты вращения двигателя для принудительного снижения целевой частоты вращения двигателя для управления скоростью холостого хода двигателя. В таком случае в качестве этого процесса уменьшения целевой частоты вращения двигателя, если целевая частота вращения двигателя равна или выше, чем пороговое значение, осуществляется постепенное снижение целевой частоты вращения двигателя на величину снижения, определенную на основе порогового значения и целевой частоты вращения двигателя.
В таком случае осуществляется процесс (S105) снижения пороговой частоты вращения двигателя для снижения пороговой частоты вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя на основе снижения целевой частоты вращения двигателя. Благодаря снижению пороговой частоты вращения двигателя при помощи процесса снижения пороговой частоты вращения двигателя частота вращения двигателя не может стать равной или ниже, чем пороговая частота вращения двигателя, даже когда дальнейшее снижение частоты вращения двигателя вызвано вследствие воздействия помех на ведущие колеса 6 в ходе снижения частоты вращения двигателя в результате снижения целевой частоты вращения двигателя. Соответственно, частота вращения двигателя не может быть быстро увеличена посредством выполнения управления предотвращением уменьшения частоты вращения двигателя в результате снижения частоты вращения двигателя, и скорость транспортного средства не может уменьшаться посредством быстрого увеличения частоты вращения двигателя. Таким образом, автомобиль может быстро останавливаться после движения.
С другой стороны, если на этапе S101 сделано отрицательное определение, осуществляется определение того, был ли автомобиль остановлен после движения со скоростью транспортного средства, равной "0" (S106). Если на этом этапе сделано положительное определение, выполняется процесс (S108) восстановления целевой частоты вращения двигателя для восстановления целевой частоты вращения двигателя управлением холостым ходом двигателя до величины до ее снижения, если целевая частота вращения двигателя снижена (S107: ДА). В таком случае целевая частота вращения двигателя постепенно восстанавливается до значения до ее снижения в качестве процесса восстановления целевой частоты вращения двигателя. В примере, показанном на фиг.2D, когда достигнут момент времени T3, целевая частота вращения двигателя постепенно восстанавливается до величины до ее снижения, обозначенной прерывистыми линиями. Целевая частота вращения двигателя постепенно восстанавливается до величины до ее снижения, например, для сдерживания частоты вращения двигателя, которая увеличивается, когда целевая частота вращения двигателя восстанавливается от отклонения от целевой частоты вращения двигателя.
После этого выполняется процесс (S109) восстановления пороговый частоты вращения двигателя для восстановления пороговой частоты вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя до ее величины до снижения на основе восстановления целевой частоты вращения двигателя до ее величины до снижения. В примере, показанном на фиг.2D, пороговая частота вращения двигателя восстанавливается до ее величины до снижения после момента T3 времени, более конкретно, в момент времени T4, когда целевая частота вращения двигателя равна ее величине до снижения.
Согласно описанному выше первому варианту осуществления изобретения получен следующий эффект. (1) Когда двигатель 1 переключается на работу на холостом ходу в процессе остановки автомобиля после движения, целевая частота вращения двигателя для управления холостым ходом двигателя снижается, и пороговая частота вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя также снижается соответственно, при условии, что автомобиль движется по поверхности дороги с низким коэффициентом трения. Таким образом, частота вращения двигателя не может снижаться из-за воздействия помех на ведущие колеса 6 и становится равной или ниже, чем пороговая частота вращения двигателя, когда происходит снижение частоты вращения двигателя, когда целевая частота вращения двигателя снижается. Соответственно, если целевая частота вращения двигателя снижается, как описано выше в процессе остановки автомобиля после движения, ограничивается выполнение управления предотвращением уменьшения частоты вращения двигателя в результате снижения целевой частоты вращения двигателя, и автомобиль может быть быстро остановлен, даже если существует быстрое повышение частоты вращения двигателя в результате выполнения управления предотвращением уменьшения частоты вращения двигателя. Кроме того, двигатель 1 не останавливается также в результате ограничения при выполнении управления предотвращением уменьшения частоты вращения двигателя.
(2) Может возникнуть ситуация, когда частота вращения двигателя снижается в результате увеличения сопротивления вращению двигателя 1, вызванного приведением в действие вспомогательного оборудования, такого как компрессор для кондиционера и т.п., если целевая частота вращения двигателя для управления холостым ходом двигателя и пороговой частоты вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя не восстановлены до величины до снижения, соответственно, после того, как автомобиль был остановлен после движения. Кроме того, даже если управление предотвращением уменьшения частоты вращения двигателя осуществляется, когда частота вращения двигателя равна или ниже пороговой частоты вращения двигателя из-за снижения частоты вращения двигателя, может также возникать ситуация, когда частота вращения двигателя не может быть быстро повышена. Однако целевая частота вращения двигателя восстанавливается до величины до снижения посредством процесса восстановления целевой частоты вращения двигателя, и, кроме того, пороговая частота вращения двигателя также восстанавливается до ее величины до снижения посредством процесса восстановления частоты вращения двигателя при условии, что автомобиль остановлен после движения. Таким образом, возникновение неудобства может быть предотвращено.
Далее со ссылками на фиг.4A-4E и фиг.5A-5E будет описан второй вариант осуществления изобретения. Во втором варианте осуществления изобретения добавлены модификации способов осуществления процесса (S105 на фиг.3) снижения пороговой частоты вращения двигателя и процесса (S109 на фиг.3) восстановления частоты вращения двигателя для исключения остановки двигателя 1 при снижении/восстановлении пороговой частоты вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя.
В первом варианте осуществления изобретения, когда целевая частота вращения двигателя для управления холостым ходом двигателя постепенно снижается при переключении двигателя 1 на работу на холостом ходу в процессе остановки автомобиля после движения (Т1 на фиг.4A), пороговая частота вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя быстро снижается в момент времени (Т1), который соответствует началу снижения целевой частоты вращения двигателя, как показано на фиг.4B. В этом случае пороговая частота вращения двигателя делается намного меньшей, чем целевая частота вращения двигателя (прерывистые линии), которая постепенно снижается. В этой ситуации, если частота вращения двигателя быстро снижается, как обозначено сплошной линией на фиг.4B, может возникать неудобство относительно быстрого увеличения частоты вращения двигателя из-за выполнения управления предотвращением уменьшения частоты вращения двигателя. То есть, если частота вращения двигателя равна или ниже пороговой частоты вращения двигателя (чередующиеся длинная и две короткие прерывистые линии), которая сделана намного меньшей, чем целевая частота вращения (как обозначено прерывистыми линиями), вследствие быстрого снижения частоты вращения двигателя (в момент времени T5), частота вращения двигателя не может быть быстро увеличена, несмотря на выполнение управления предотвращением уменьшения частоты вращения двигателя, как показано на фиг.4C, и двигатель 1 может остановиться.
Во втором варианте осуществления изобретения для снижения возможности остановки двигателя 1 пороговая частота вращения двигателя постепенно снижается в соответствии со снижением целевой частоты вращения двигателя (как обозначено прерывистыми линиями на фиг.4D), как процесс снижения пороговой частоты вращения двигателя, как обозначено чередующимися длинной и двумя короткими прерывистыми линиями на фиг.4D. Более конкретно, пороговая частота вращения двигателя задается как величина, полученная вычитанием некоторой заданной величины из целевой частоты вращения двигателя, которая постепенно снижается, как описано выше. Пороговая частота вращения двигателя, таким образом, постепенно снижается в соответствии со снижением целевой частоты вращения двигателя. Можно предусматривать использование в качестве заданной величины, например, разности между целевой частотой вращения двигателя и пороговой частотой вращения двигателя при переключении (T1) двигателя 1 на работу на холостом ходу.
Благодаря предшествующей процедуре, когда частота вращения двигателя быстро снижается, как обозначено сплошной линией на фиг.4D, в ситуации, когда целевая частота вращения двигателя постепенно снижается (как обозначено прерывистыми линиями), снижение частоты вращения двигателя до величины, равной или ниже, чем пороговая частота вращения двигателя (как обозначено чередующимися длинной и двумя короткими прерывистыми линиями), которая постепенно снижается, когда целевая частота вращения двигателя снижается, происходит в более ранний момент (в момент Т6 времени). В результате, как показано на фиг.4E, управление предотвращением уменьшения частоты вращения двигателя быстро осуществляется для быстрого увеличения частоты вращения двигателя. Частота вращения двигателя, таким образом, быстро увеличивается благодаря управлению предотвращением уменьшения частоты вращения двигателя в более ранний момент времени, когда частота вращения двигателя быстро снижается. Таким образом, сдерживается возникновение неудобства, а именно возможная остановка двигателя 1 вследствие неспособности быстро увеличивать частоту вращения двигателя.
С другой стороны, если целевая частота вращения двигателя для управления холостым ходом двигателя постепенно восстанавливается до ее величины до снижения после того, как автомобиль остановлен после движения, пороговая частота вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя быстро восстанавливается при завершении (T4) восстановления целевой частоты вращения двигателя, как показано на фиг.5B в первом варианте осуществления изобретения. Здесь следует отметить, что пороговая частота вращения двигателя задана намного ниже, чем целевая частота вращения двигателя между моментом (T3) времени, соответствующим началу восстановления целевой частоты вращения и моментом (T4) времени, соответствующим восстановлению пороговой частоты вращения двигателя. В этой ситуации, если частота вращения двигателя быстро снижается вследствие увеличения нагрузки привода для любого из вспомогательных устройств, таких как компрессор для кондиционера, приводимый двигателем 1, и т.п., в результате увеличения требуемой величины привода для вспомогательного оборудования может произойти неудобство относительно быстрого увеличения частоты вращения двигателя из-за управления предотвращением уменьшения частоты вращения двигателя. То есть, если частота вращения двигателя равна или ниже пороговой частоты вращения двигателя, которая задана намного ниже, чем целевая частота вращения двигателя, вследствие быстрого снижения частоты вращения двигателя (в момент Т7 времени), частота вращения двигателя не может быть быстро увеличена несмотря на выполнение управления предотвращением уменьшения частоты вращения двигателя, как показано на фиг.5C, и двигатель 1 может остановиться.
В этом втором варианте осуществления изобретения для предотвращения остановки двигателя 1, как описано выше, пороговая частота вращения двигателя постепенно восстанавливается до ее величины до снижения подобно восстановлению целевой частоты вращения двигателя до ее величины до снижения (как обозначено прерывистыми линиями на фиг.5D) в качестве процесса восстановления частоты вращения двигателя, как обозначено чередующимися длинной и двумя короткими прерывистыми линиями на фиг.5D. Более конкретно, пороговая частота вращения двигателя получена посредством вычитания заданной величины из величины целевой частоты вращения двигателя, которая постепенно восстанавливается до ее величины до снижения, как описано выше. Пороговая частота вращения двигателя, таким образом, постепенно восстанавливается до ее величины до снижения подобно восстановлению целевой частоты вращения двигателя до ее величины до снижения. Предполагается возможность использования как заданной величины, например, разности между целевой частотой вращения двигателя и пороговой частотой вращения двигателя в начале восстановления (T3) целевой частоты вращения двигателя до ее величины до снижения.
Вследствие предшествующей процедуры, если частота вращения двигателя (как обозначено сплошной линией) быстро снижается вследствие увеличения нагрузки привода (сопротивления вращению) любого из вспомогательных устройств в двигателе 1 и т.п. в ситуации, когда целевая частота вращения двигателя постепенно восстанавливается до ее величины до снижения, снижение частоты вращения двигателя до величины, равной или ниже пороговой частоты вращения двигателя (как обозначено чередующимися длинной и двумя короткими прерывистыми линиями), которая постепенно восстанавливается до ее величины до снижения, происходит в более ранний момент времени (в момент Т8 времени). В результате, как показано на фиг.5E, управление предотвращением уменьшения частоты вращения двигателя быстро выполняется для быстрого увеличения частоты вращения двигателя. Частота вращения двигателя, таким образом, быстро увеличивается при помощи управления предотвращением уменьшения частоты вращения двигателя в более ранний момент времени, если частота вращения двигателя быстро снижена. Таким образом, возникновение неудобства, а именно возможная остановка двигателя 1 в результате неспособности быстро увеличивать частоту вращения двигателя, предотвращается.
Согласно второму варианту осуществления изобретения, описанному выше подробно, получены следующие эффекты в дополнение к эффектам (1) и (2) первого варианта осуществления изобретения. (3) Пороговая частота вращения двигателя постепенно снижается в соответствии со снижением целевой частоты вращения двигателя при помощи обработки для снижения целевой частоты вращения двигателя как процесса снижения пороговой частоты вращения двигателя. Таким образом, если частота вращения двигателя быстро снижается в ситуации, когда целевая частота вращения двигателя постепенно снижается, снижение частоты вращения двигателя до величины, равной или ниже пороговой частоты вращения двигателя, которая постепенно снижается, когда целевая частота вращения двигателя снижается, происходит в более ранний момент времени. В результате управление предотвращением уменьшения частоты вращения двигателя быстро выполняется для быстрого увеличения частоты вращения двигателя. Таким образом, может предотвращаться остановка двигателя 1 вследствие неспособности быстрого увеличения частоты вращения двигателя.
(4) Пороговая частота вращения двигателя является постепенно снижаемым пороговым значением посредством вычитания некоторой заданной величины из величины целевой частоты вращения двигателя. Таким образом, пороговая частота вращения двигателя может надлежащим образом и постепенно снижаться в соответствии с постепенным снижением целевой частоты вращения двигателя.
(5) Как процесс восстановления частоты вращения двигателя пороговая частота вращения двигателя постепенно восстанавливается до ее величины до снижения в соответствии с восстановлением целевой частоты вращения двигателя до ее величины до снижения при помощи процесса восстановления целевой частоты вращения двигателя. Таким образом, когда частота вращения двигателя быстро снижается вследствие увеличения нагрузки привода (сопротивления вращению) любого из вспомогательных устройств двигателе 1 и т.п. в ситуации, когда целевая частота вращения двигателя постепенно восстанавливается до ее величины до снижения, снижение частоты вращения двигателя до величины, равной или ниже, чем пороговая частота вращения двигателя, которая постепенно восстанавливается до ее величины до снижения, происходит в более ранний момент времени. В результате управление предотвращением снижения вращения быстро выполняется для быстрого увеличения частоты вращения двигателя. Таким образом, предотвращается остановка двигателя 1 вследствие неспособности достаточно увеличивать частоту вращения двигателя.
(6) Пороговая частота вращения двигателя постепенно восстанавливается до ее величины до снижения посредством задания как пороговой частоты вращения двигателя величины, полученной вычитанием некоторой заданной величины из целевой частоты вращения двигателя, которая постепенно восстанавливается до ее величины до снижения. Таким образом, пороговая частота вращения двигателя может надлежащим образом и постепенно восстанавливаться до ее величины до снижения в соответствии с постепенным восстановлением целевой частоты вращения двигателя до ее величины до снижения.
Далее на основе фиг.6 будет описан третий вариант осуществления изобретения. Третий вариант осуществления изобретения предотвращает возникновение ситуации, когда быстрое увеличение частоты вращения двигателя при помощи управления предотвращением уменьшения частоты вращения двигателя не может быть осуществлено, и двигатель 1 может остановиться, даже если частота вращения двигателя равна или ниже пороговой частоты вращения двигателя, и управление предотвращением уменьшения частоты вращения двигателя выполняется, когда пороговая частота вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя снижается во втором варианте осуществления изобретения.
Если пороговая частота вращения двигателя снижается при помощи процесса снижения пороговой частоты вращения двигателя, как обозначено чередующимися длинной и двумя короткими прерывистыми линиями на фиг.6B, возможно падение пороговой частоты вращения двигателя ниже частоты вращения двигателя нижнего предела (как обозначено чередующимися длинной и короткими прерывистыми линиями на фиг.6B), которая является минимальной частотой вращения двигателя, при которой двигатель 1 может автономно работать. В этом случае, даже если частота вращения двигателя снижается как обозначено сплошной линией на фиг.6B, становясь равной или ниже, чем пороговая частота вращения двигателя, и управление предотвращением уменьшения частоты вращения двигателя выполняется, как показано на фиг.6C (в момент Т9 времени), двигатель 1 может остановиться вследствие неспособности быстрого увеличения частоты вращения двигателя из-за управления предотвращением уменьшения частоты вращения двигателя.
В третьем варианте осуществления изобретения с целью предотвращения остановки двигателя 1, как описано выше, когда пороговая частота вращения двигателя снижается при помощи процесса снижения пороговой частоты вращения двигателя, уменьшенная пороговая частота вращения двигателя сравнивается с частотой вращения двигателя нижнего предела. Если пороговая частота вращения двигателя ниже, чем частота вращения двигателя нижнего предела, частота вращения двигателя нижнего предела используется как пороговая частота вращения двигателя. Другими словами, частота вращения нижнего предела служит величиной защитного нижнего предела пороговой частоты вращения двигателя. В этом случае, соответственно, пороговая частота вращения двигателя установлена равной частоте вращения двигателя нижнего предела (как обозначено чередующимися длинной и короткой прерывистыми линиями), как обозначено чередующимися длинной и двумя короткими прерывистыми линиями на фиг.6D. Используемая здесь частота вращения двигателя нижнего предела вычисляется на основе температуры охлаждающей жидкости двигателя (соответствующей температуре двигателя) со ссылками на карту и т.п., которая задана предварительно при помощи эксперимента и т.п. В таком случае частота вращения двигателя нижнего предела непостоянно устанавливается на основе температуры хладагента для двигателя 1 таким образом, что она увеличивается, когда температура хладагента уменьшается. Это происходит потому, что, когда температура охлаждающей жидкости двигателя уменьшается, температура смазочного масла для двигателя 1 снижается, что вызывает увеличение вязкости смазочного масла и, таким образом, увеличение сопротивления вращению двигателя 1.
В случае, когда пороговая частота вращения двигателя задана равной частоте вращения двигателя нижнего предела при помощи защиты, когда частота вращения двигателя равна или ниже пороговой частоты вращения двигателя (частоты вращения двигателя нижнего предела), как обозначено сплошной линией на фиг.6D, управление предотвращением уменьшения частоты вращения двигателя выполняется, как показано на фиг.6E, на основе снижения частоты вращения двигателя (в момент Т10 времени). Управление предотвращением уменьшения частоты вращения двигателя осуществляется, когда частота вращения двигателя равна или ниже частоты вращения двигателя нижнего предела. Таким образом, предотвращается возникновение неудобства, а именно остановка двигателя 1 в результате неспособности быстро увеличивать частоту вращения двигателя, несмотря на осуществление управления.
Согласно третьему варианту осуществления изобретения получен следующий эффект в дополнение к эффекту второго варианта осуществления изобретения. (7) Даже когда пороговая частота вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя снижается при помощи процесса снижения пороговой частоты вращения двигателя, пороговая частота вращения двигателя снижается самое большее до частоты вращения двигателя нижнего предела, которая является минимальной частотой вращения двигателя, при которой двигатель 1 может автономно работать. Таким образом, когда частота вращения двигателя снижается до величины, равной или ниже пороговой частоты вращения двигателя, и осуществляется управление предотвращением уменьшения частоты вращения двигателя, надлежащим образом предотвращается возникновение неудобства, а именно остановки двигателя 1 в результате неспособности быстро увеличивать частоту вращения двигателя при помощи управления.
Предшествующие соответствующие варианты осуществления изобретения также могут быть модифицированы, например, следующим образом. Защита нижнего предела для пороговой частоты вращения двигателя в третьем варианте осуществления изобретения может применяться в первом варианте осуществления изобретения.
Во втором варианте осуществления изобретения пороговая частота вращения двигателя может также постепенно снижаться в процессе уменьшения пороговой частоты вращения двигателя на основе истечения времени от момента времени, соответствующего началу снижения целевой частоты вращения двигателя при помощи процесса уменьшения целевой частоты вращения двигателя.
Во втором варианте осуществления изобретения пороговая частота вращения двигателя также может быть постепенно восстановлена до ее величины до снижения в процессе восстановления пороговой частоты вращения двигателя на основе истечения времени от момента времени, соответствующего началу восстановления целевой частоты вращения двигателя, при помощи процесса восстановления целевой частоты вращения двигателя.
В процессе сокращения целевой частоты вращения двигателя, согласно первому варианту осуществления изобретения, целевая частота вращения двигателя может снижаться немедленно. В процессе сокращения целевой частоты вращения двигателя, согласно каждому предшествующему варианту осуществления изобретения, пороговое значение для определения, является ли целевая частота вращения двигателя высокой, может быть задано так, чтобы движущая сила, которая прилагается к ведущим колесам 6 на основе частоты вращения двигателя, если частота вращения двигателя скорректирована до этой величины, была меньше, чем максимальная величина тормозной силы, прилагаемой к ведущим колесам 6 тормозом 23.
В процессе сокращения целевой частоты вращения двигателя, согласно каждому описанному варианту осуществления изобретения, когда двигатель 1 переключается на работу на холостом ходу в процессе остановки автомобиля после движения, целевая частота вращения двигателя может всегда снижаться, если автомобиль движется по поверхности дороги с низким коэффициентом трения, независимо от того, равна ли целевая частота вращения двигателя или выше, чем пороговое значение.
В процессе сокращения целевой частоты вращения двигателя, согласно каждому предшествующему варианту осуществления изобретения, величина, на которую целевая частота вращения двигателя снижается, не требует переменного задания на основе целевой частоты вращения двигателя до снижения и порогового значения. Например, в качестве величины снижения может также использоваться установленная величина, которая была определена опытным путем.
Изобретение может также применяться с автомобилем с передним приводом. Более желательный эффект достигается, если изобретение применяется с автомобилем с задним приводом, как в каждом предшествующем варианте осуществления изобретения. Это связано с тем фактом, что тормозная сила, прилагаемая тормозом, воздействующим на задние колеса, меньше, чем тормозная сила, прилагаемая тормозом, воздействующим на передние колеса в автомобиле, с точки зрения стабильности положения в процессе остановки автомобиля после движения. То есть в автомобиле с задним приводом тормозная сила, прилагаемая тормозом, воздействующим на задние колеса, мала, и движущая сила, прилагаемая к ведущим колесам в результате работы на холостом ходу двигателя 1 в процессе остановки автомобиля после движения, имеет тенденцию быть большей, чем тормозная сила, прилагаемая тормозом, воздействующим на ведущие колеса. Таким образом, существует тенденция затраты некоторого времени для остановки автомобиля после движения. Благодаря применению изобретения для автомобиля с задним приводом, который имеет эту характеристику, достигается более желательный эффект.
Изобретение может применяться для автомобиля, оборудованного вакуумным усилителем тормозов, который содействует нажиму на педаль тормоза с использованием отрицательного давления, производимого в системе впуска двигателя 1. В этом случае достигается более желательный эффект. Когда двигатель 1 работает на холостом ходу, отрицательное давление, производимое в системе впуска двигателя 1, имеет тенденцию становиться равным величине на стороне атмосферного давления. В этом состоянии усилитель тормозов не обеспечивает большого содействия нажиму на педаль тормоза, и тормозная сила, прилагаемая к ведущим колесам, уменьшается. То есть в автомобиле, оборудованном вакуумным усилителем тормозов, когда двигатель 1 переключается на работу на холостом ходу в процессе остановки автомобиля после движения, тормозная сила, прилагаемая тормозами, воздействующими на ведущие колеса, имеет тенденцию уменьшаться, и движущая сила, прилагаемая к ведущим колесам в результате работы на холостом ходу, имеет тенденцию превышать тормозную силу. Таким образом, существует тенденция затраты некоторого времени для остановки автомобиля после движения. Благодаря применению изобретения для автомобиля, оборудованного вакуумным усилителем тормозов, который имеет эту характеристику, достигнут более желательный эффект.
Двигатель 1 может выполнять управление частотой вращения холостого хода посредством регулирования степени открывания клапана регулирования холостого хода, расположенного в обводном канале, который обходит дроссельную заслонку 12.
Двигатель 1 может быть дизельным двигателем, частота вращения которого в течение работы на холостом ходу регулируется при помощи регулирования количества впрыскиваемого топлива.
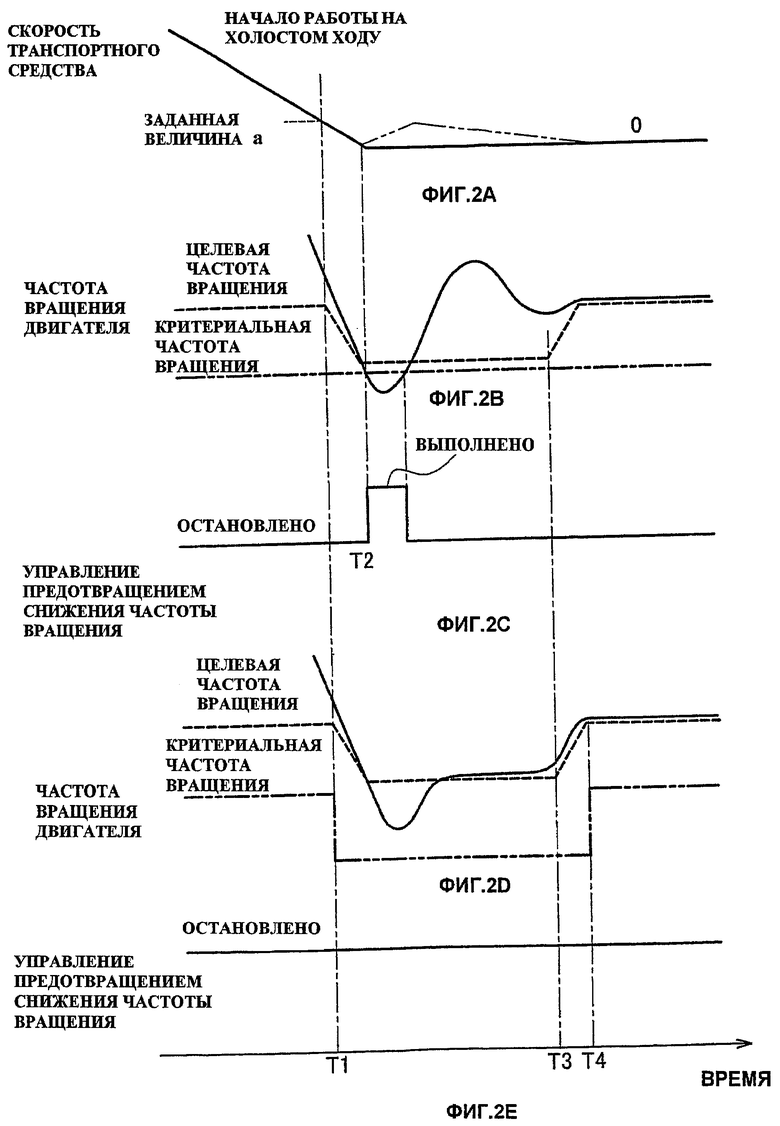
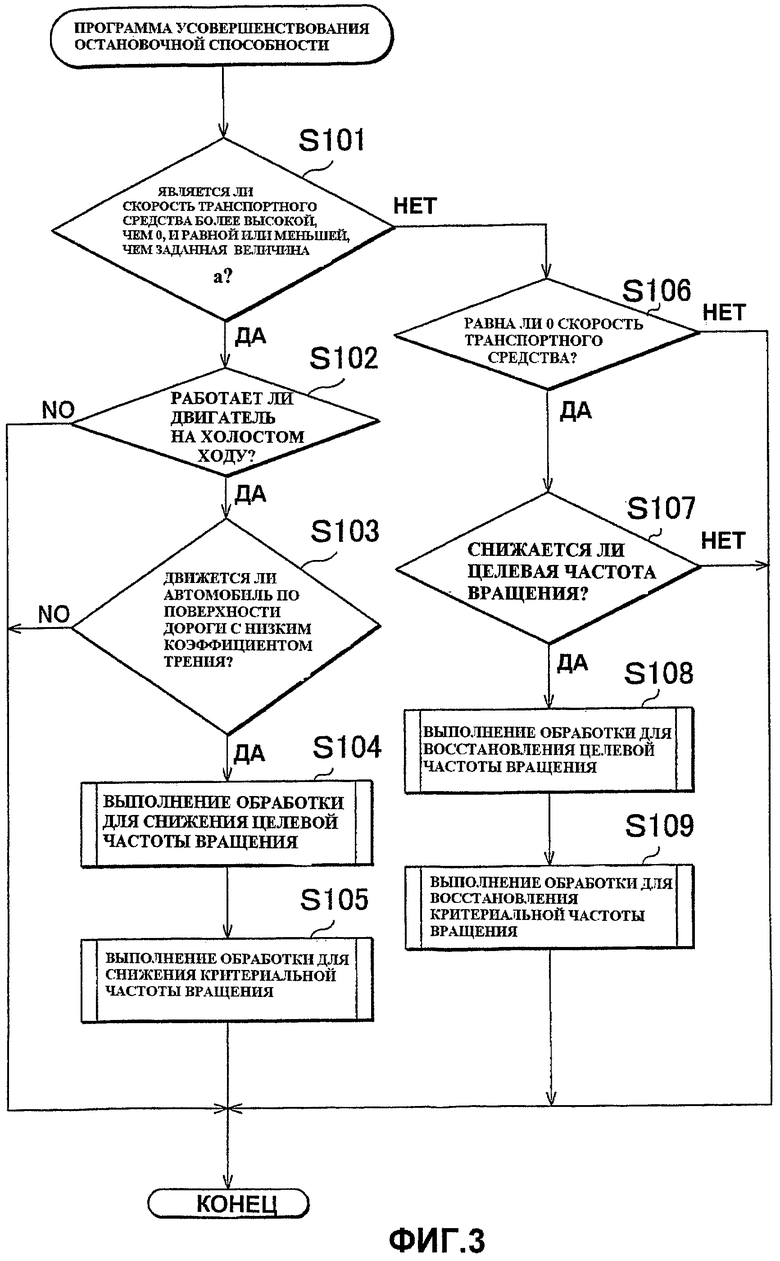
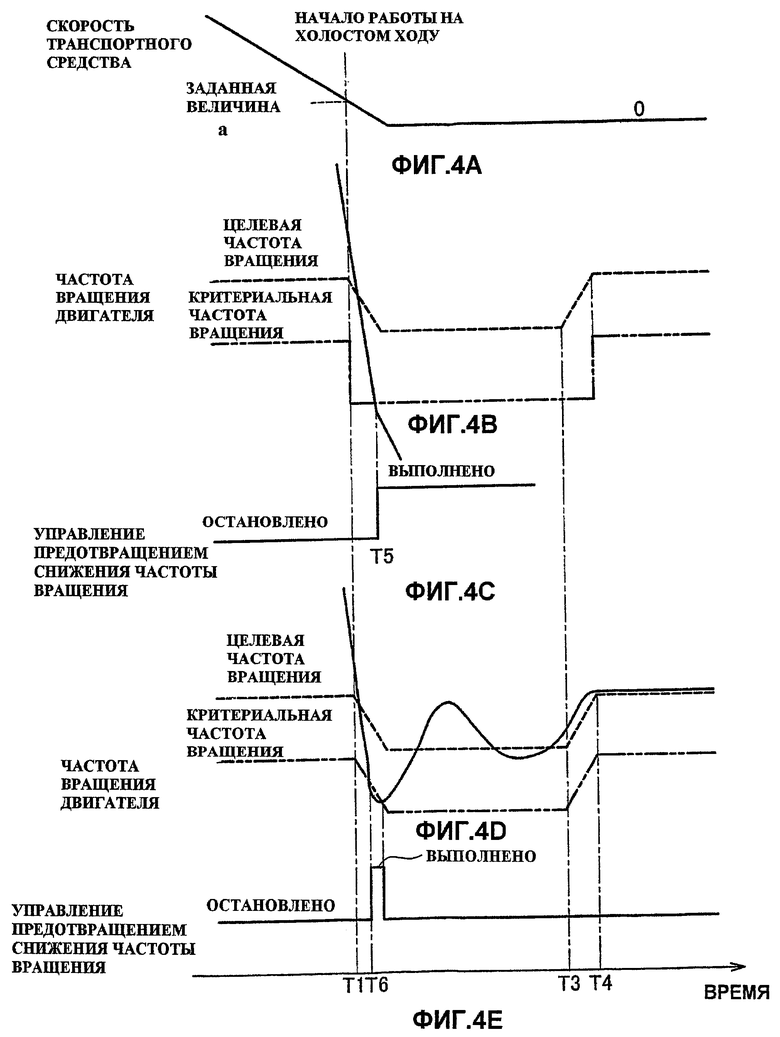
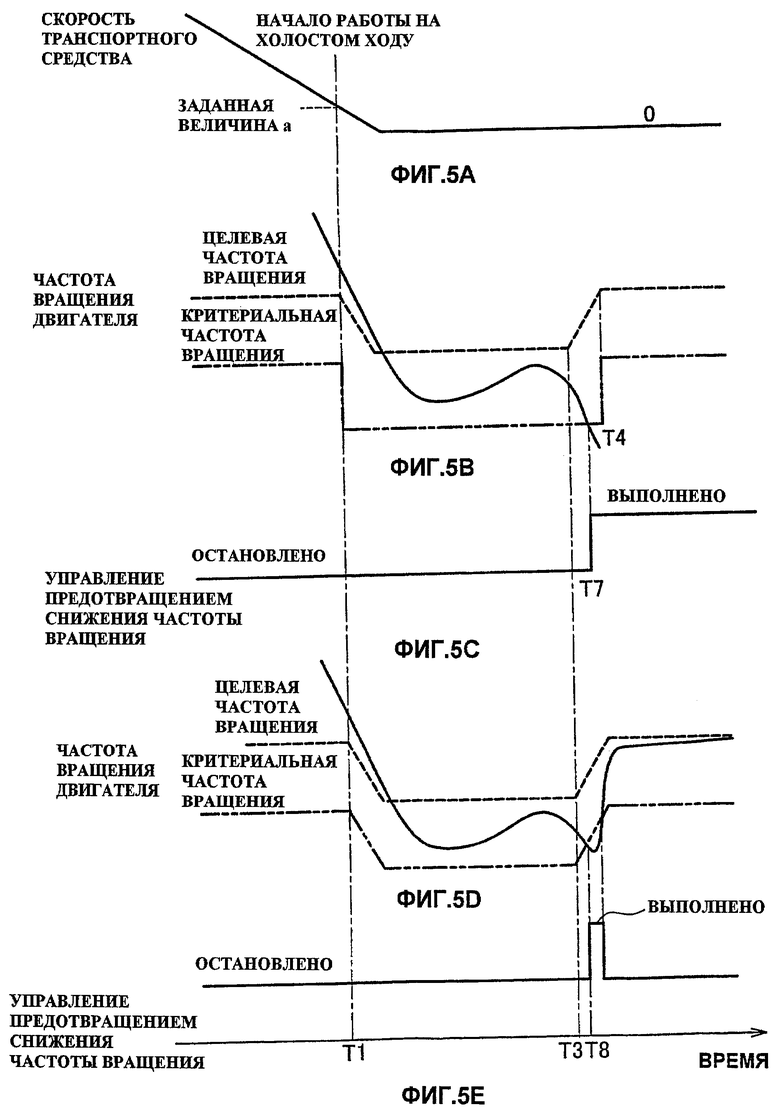
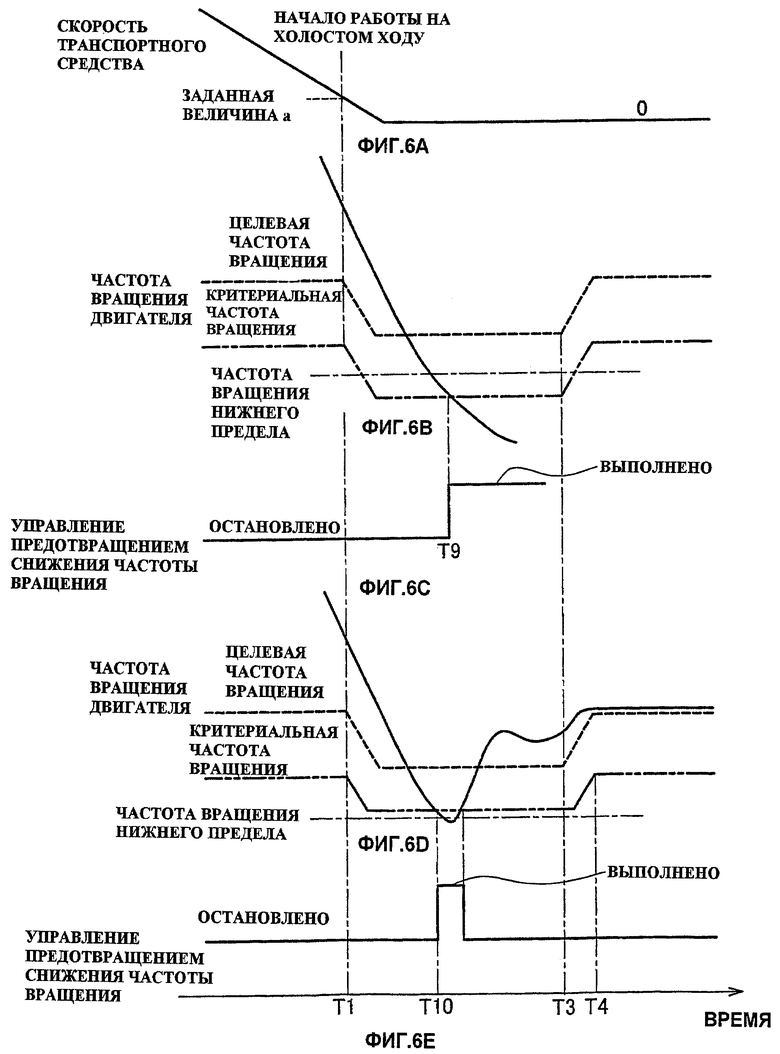
Изобретение относится к устройству управления и способу управления двигателем внутреннего сгорания (ДВС), установленным на транспортном средстве. Устройство управления ДВС осуществляет управление частотой вращения холостого хода ДВС и содержит управляющий блок. Управление осуществляется регулированием частоты вращения ДВС до целевой частоты вращения ДВС. Целевая частота задается в соответствии с рабочим состоянием ДВС и снижается, когда скорость транспортного средства равна или ниже заданной. При частоте вращения ДВС, равной или ниже, чем пороговая частота вращения ДВС, которая ниже, чем целевая частота, производится быстрое увеличение частоты вращения ДВС. Быстрое увеличение частоты вращения ДВС производится для предотвращения уменьшения частоты вращения ДВС. Управляющий блок определяет движение транспортного средства по поверхности дороги с низким коэффициентом трения. При движении по поверхности дороги с низким коэффициентом трения, при переключении ДВС на работу на холостом ходу, управляющий блок снижает целевую частоту вращения ДВС. Сокращение пороговой частоты производится для управления предотвращением уменьшения частоты вращения ДВС. Также в изобретении раскрыт способ управления частотой вращения холостого хода ДВС. Технический результат заключается в возможности быстрой остановки транспортного средства. 2 н. и 8 з.п. ф-лы, 22 ил.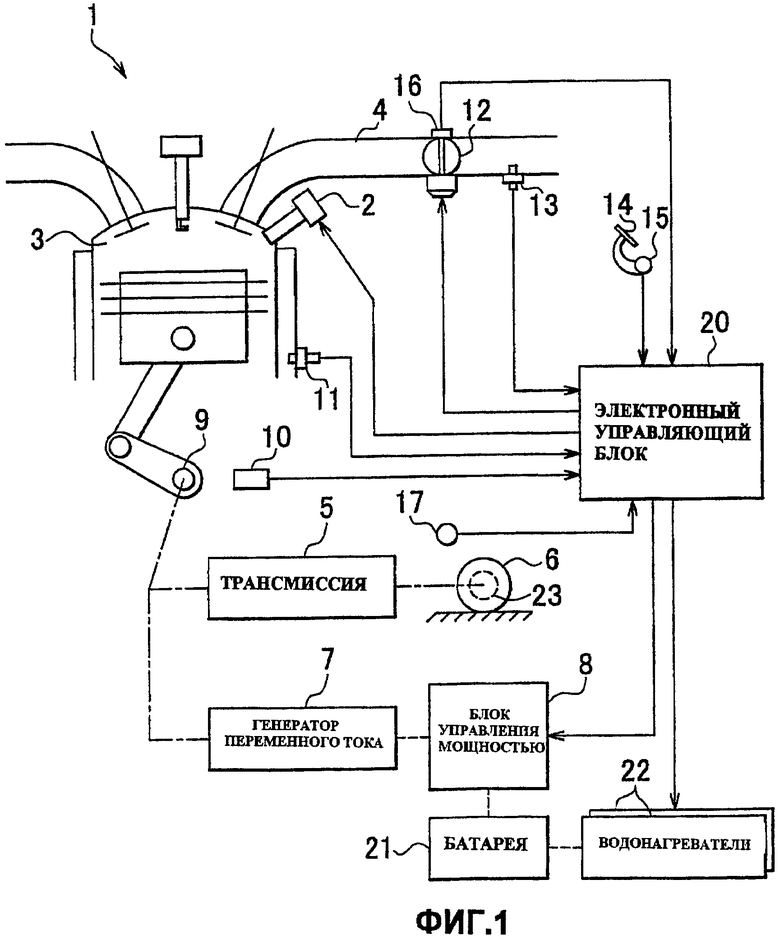
1. Устройство управления для двигателя внутреннего сгорания, установленного на транспортном средстве, в котором осуществляются управление частотой вращения холостого хода двигателя для регулирования частоты вращения двигателя до целевой частоты вращения двигателя, заданной в соответствии с рабочим состоянием двигателя, и управление предотвращением уменьшения частоты вращения двигателя для быстрого увеличения частоты вращения двигателя для исключения остановки двигателя внутреннего сгорания, когда частота вращения двигателя становится равной или ниже, чем пороговая частота вращения двигателя, которая ниже, чем целевая частота вращения двигателя, когда двигатель работает на холостом ходу, и целевая частота вращения двигателя для управления холостым ходом двигателя снижается, когда скорость транспортного средства равна или ниже заданной скорости транспортного средства для переключения двигателя внутреннего сгорания на работу на холостом ходу при остановке транспортного средства после движения, отличающееся тем, что оно содержит управляющий блок, выполненный с возможностью определения того, движется ли транспортное средство по поверхности дороги с низким коэффициентом трения, и снижения целевой частоты вращения двигателя, когда двигатель внутреннего сгорания переключается на работу на холостом ходу в процессе остановки транспортного средства после движения и сокращения пороговой частоты вращения двигателя для управления предотвращением уменьшения частоты вращения двигателя, если транспортное средство движется по поверхности дороги с низким коэффициентом трения.
2. Устройство по п.1, отличающееся тем, что целевая частота вращения двигателя постепенно снижается, когда скорость транспортного средства равна или ниже заданной скорости транспортного средства в процессе остановки транспортного средства после движения, и управляющий блок постепенно снижает пороговую частоту вращения двигателя в соответствии со снижением целевой частоты вращения двигателя.
3. Устройство по п.1, отличающееся тем, что целевая частота вращения двигателя восстанавливается до ее величины до снижения после снижения в течение работы на холостом ходу в процессе остановки транспортного средства после движения при условии, что транспортное средство остановлено после движения, и управляющий блок восстанавливает уменьшенную пороговую частоту вращения двигателя до ее величины до снижения на основе восстановления целевой частоты вращения двигателя до ее величины до снижения.
4. Устройство по п.3, отличающееся тем, что целевая частота вращения двигателя постепенно восстанавливается до ее величины до снижения, и управляющий блок постепенно восстанавливает пороговую частоту вращения двигателя до ее величины до снижения в соответствии с восстановлением целевой частоты вращения двигателя до ее величины до снижения.
5. Устройство по любому из пп.2-4, отличающееся тем, что управляющий блок вычитает заданную величину из целевой частоты вращения двигателя и задает полученную в результате частоту вращения двигателя как пороговую частоту вращения двигателя.
6. Устройство по п.1, отличающееся тем, что сниженная пороговая частота вращения двигателя и частота вращения двигателя нижнего предела как величина, соответствующая минимальной частоте вращения двигателя, при которой двигатель внутреннего сгорания может автономно работать, сравниваются друг с другом, и частота вращения двигателя нижнего предела задается как пороговая частота вращения двигателя, когда пороговая частота вращения двигателя ниже, чем частота вращения двигателя нижнего предела.
7. Устройство по п.6, отличающееся тем, что управляющий блок задает частоту вращения двигателя нижнего предела в соответствии с температурой двигателя.
8. Устройство по п.2, отличающееся тем, что управляющий блок снижает пороговую частоту вращения двигателя на основе истечения времени от момента времени, соответствующего началу снижения целевой частоты вращения двигателя.
9. Устройство по п.4, отличающееся тем, что управляющий блок восстанавливает пороговую частоту вращения двигателя до ее величины до снижения на основе истечения времени от момента времени, соответствующего началу восстановления целевой частоты вращения двигателя до ее величины до снижения.
10. Способ управления двигателем внутреннего сгорания, установленным на транспортном средстве, при котором осуществляют управление частотой вращения холостого хода двигателя для регулирования частоты вращения двигателя до целевой частоты вращения двигателя, заданной в соответствии с рабочим состоянием двигателя, и управление предотвращением уменьшения частоты вращения двигателя для быстрого увеличения частоты вращения двигателя для исключения остановки двигателя внутреннего сгорания, когда частота вращения двигателя становится равной или ниже, чем пороговая частота вращения двигателя, которая ниже, чем целевая частота вращения двигателя, когда двигатель работает на холостом ходу, и целевая частота вращения двигателя для управления холостым ходом двигателя снижается, когда скорость транспортного средства равна или ниже заданной скорости транспортного средства для переключения двигателя внутреннего сгорания на работу на холостом ходу при остановке транспортного средства после движения, отличающийся тем, что включает определение того, движется ли транспортное средство по дороге с низким коэффициентом трения; и снижение целевой частоты вращения двигателя при переключении двигателя внутреннего сгорания на работу на холостом ходу в процессе остановки транспортного средства после движения и сокращение пороговой частоты вращения двигателя для управления предотвращением снижения частоты вращения двигателя, если транспортное средство движется по поверхности дороги с низким коэффициентом трения.
| JP 2006046263 А, 16.02.2006 | |||
| US 2007015630 А1, 18.01.2007 | |||
| DE 19803653 А1, 06.08.1998 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ МЕТОДОМ ИЗМЕНЕНИЯ ХОДА ПОРШНЯ И ЧИСЛА РАБОТАЮЩИХ ЦИЛИНДРОВ И ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 1998 |
|
RU2121589C1 |
| Регулятор скорости движения транспортного средства | 1986 |
|
SU1498646A1 |
| ДИФФЕРЕНЦИАЛ С АВТОМАТИЧЕСКОЙ БЛОКИРОВКОЙ КОЛЕС | 1993 |
|
RU2119435C1 |

