24
J jA«
к датчику на nfinau тармоза
It датчику на neia- сцепления К датчику ка
педали duce/ifратора
13 и гг
к SpocCf/rC HOCJ
застнке
4
СО
00 05 4 О5
J
Pu.z.l
ряет возможности автоматизации управления скоростью за счет автоматического разгона транспортного средства до границы верхних частных ограничений с интенсивностью, зависящей от действия нижних частных ограничений и поддержания скорости на уровне изменяющейся нижней границы верхних ограничений. 6 з.п. ф-лы, 6 ил.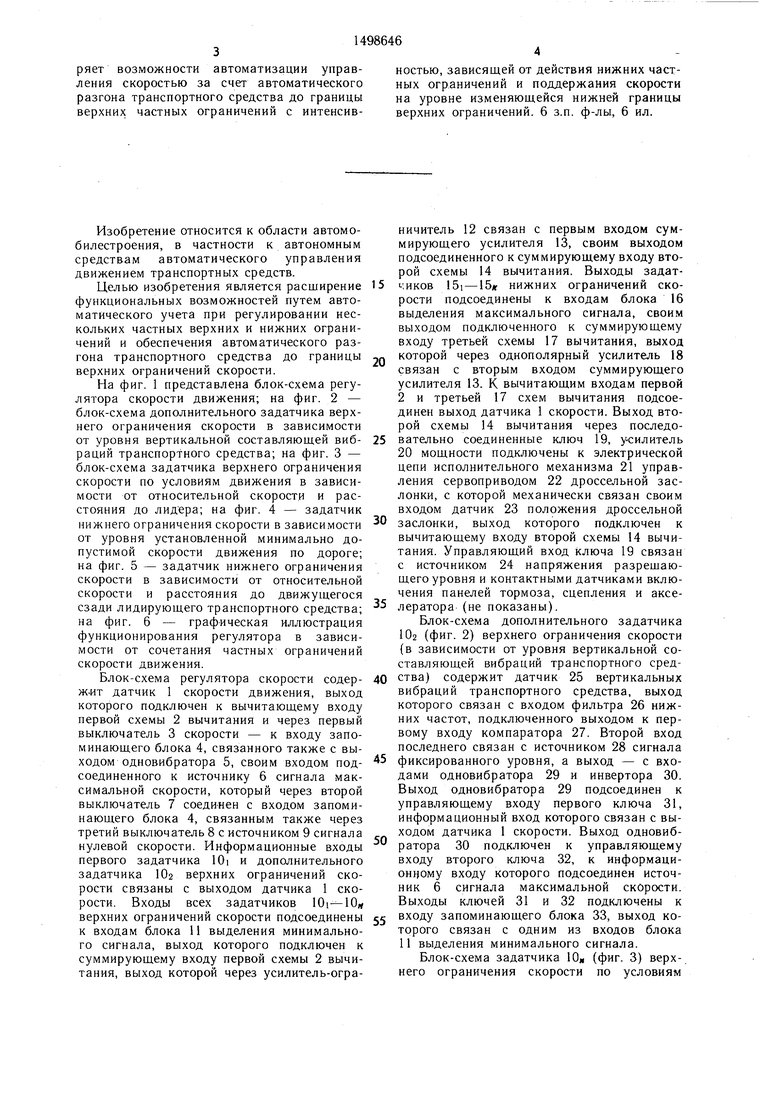
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования положения | 1990 |
|
SU1795416A1 |
| Устройство для регулирования температуры полосы в процессе прокатки | 1981 |
|
SU986531A1 |
| Устройство для динамического торможения автономного транспортного средства | 1979 |
|
SU867718A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Устройство автоматического управления роторным экскаватором | 1982 |
|
SU1097757A1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1320156A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Устройство для регулирования скорости вращения тягового электродвигателя смешанного возбуждения | 1979 |
|
SU895746A1 |
Изобретение относится к автомобилестроению ,в частности, к средствам управления движением транспортных средств. Цель изобретения - расширение функциональных возможностей путем автоматического учета при регулировании частных верхних и нижних ограничений и обеспечение автоматического разгона транспортного средства до границы верхних ограничений скорости. Регулятор содержит задатчики 10I-10N верхних ограничений скорости, через блок 11 выделения минимального сигнала связанные с суммирующим входом первой схемы 2 вычитания, а задатчики 15I-15к нижних ограничений скорости через блок 16 выделения максимального сигнала - с суммирующим входом третьей схемы 17 вычитания. Вычитающие входы схем 2 и 17 вычитания и задатчики верхних ограничений скорости в зависимости от переменных, не характеризующих движение транспортного средства, связаны с выходом датчика 1 скорости. Первая схема 2 вычитания через усилитель-ограничитель 12 и третья схема 17 вычитания через однополярный усилитель 18 связаны с входами суммирующего усилителя 13, выход которого через вторую схему 14 вычитания, ключ 19, усилитель 20 мощности подключен к электрической цепи 21 исполнительного механизма управления сервоприводом 22. Регулятор расширяет возможности автоматизации управления скоростью за счет автоматического разгона транспортного средства до границы верхних частных ограничений с интенсивностью, зависящей от действия нижних частных ограничений, и поддержания скорости на уровне изменяющейся нижней границы верхних ограничений. 6 з.п.ф-лы, 6 ил.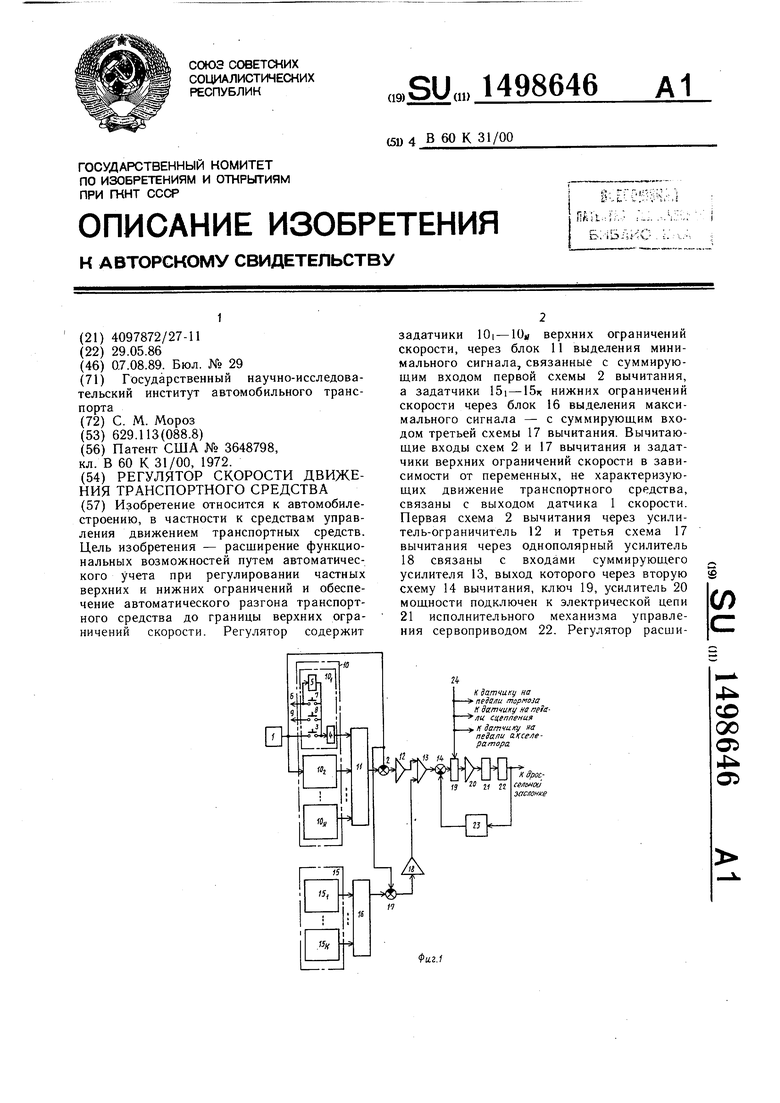
Изобретение относится к области автомобилестроения, в частности к автономным средствам автоматического управления движением транспортных средств.
Целью изобретения является расширение функциональных возможностей путем автоматического учета при регулировании нескольких частных верхних и нижних ограничений и обеспечения автоматического разгона транспортного средства до границы верхних ограничений скорости.
На фиг. 1 представлена блок-схема регулятора скорости движения; на фиг. 2 - блок-схема дополнительного задатчика верхнего ограничения скорости в зависимости от уровня вертикальной составляющей виб- раций транспортного средства; на фиг. 3 - блок-схема задатчика верхнего ограничения скорости по условиям движения в зависимости от относительной скорости и расстояния до лидера; на фиг. 4 - задатчик нижнего ограничения скорости в зависимости от уровня установленной минимально допустимой скорости движения по дороге; на фиг. 5 - задатчик нижнего ограничения скорости в зависимости от относительной скорости и расстояния до движущегося сзади лидирующего транспортного средства; на фиг. 6 - граф-ическая иллюстрация функционирования регулятора в зависимости от сочетания частных ограничений скорости движения.
Блок-схема регулятора скорости содер- ж«т датчик 1 скорости движения, выход которого подключен к вычитающему входу первой схемы 2 вычитания и через первый выключатель 3 скорости - к входу запоминающего блока 4, связанного также с выходом одновибратора 5, своим входом под- соединенного к источнику 6 сигнала максимальной скорости, который через второй выключатель 7 соеди-нен с входом запоминающего блока 4, связанным также через третий выключатель 8 с источником 9 сигнала нулевой скорости. Информационные входы первого задатчика lOi и дополнительного задатчика 102 верхних ограничений скорости связаны с выходом датчика 1 скорости. Входы всех задатчиков lOi-10,/ верхних ограничений скорости подсоединены к входам блока И выделения минимального сигнала, выход которого подключен к суммирующему входу первой схемы 2 вычитания, выход которой через усилитель-огра0
5
0 5 5
ничитель 12 связан с первым входом суммирующего усилителя 13, своим выходом подсоединенного к суммирующему входу второй схемы 14 вычитания. Выходы задатчиков 15i -15# нижних ограничений скорости подсоединены к входам блока 16 выделения максимального сигнала, своим выходом подключенного к суммирующему входу третьей схемы 17 вычитания, выход которой через однополярный усилитель 18 связан с вторым входом суммирующего усилителя 13. К вычитающим входам первой 2 и третьей 17 схем вычитания подсоединен выход датчика 1 скорости. Выход второй схемы 14 вычитания через последовательно соединенные ключ 19, у-силитель 20 мощности подключены к электрической цепи исполнительного механизма 21 управления сервоприводом 22 дроссельной заслонки, с которой механически связан своим входом датчик 23 положения дроссельной заслонки, выход которого подключен к вычитающему входу второй схемы 14 вычитания. Управляющий вход ключа 19 связан с источником 24 напряжения разрешающего уровня и контактными датчиками включения панелей тормоза, сцепления и акселератора (не показаны).
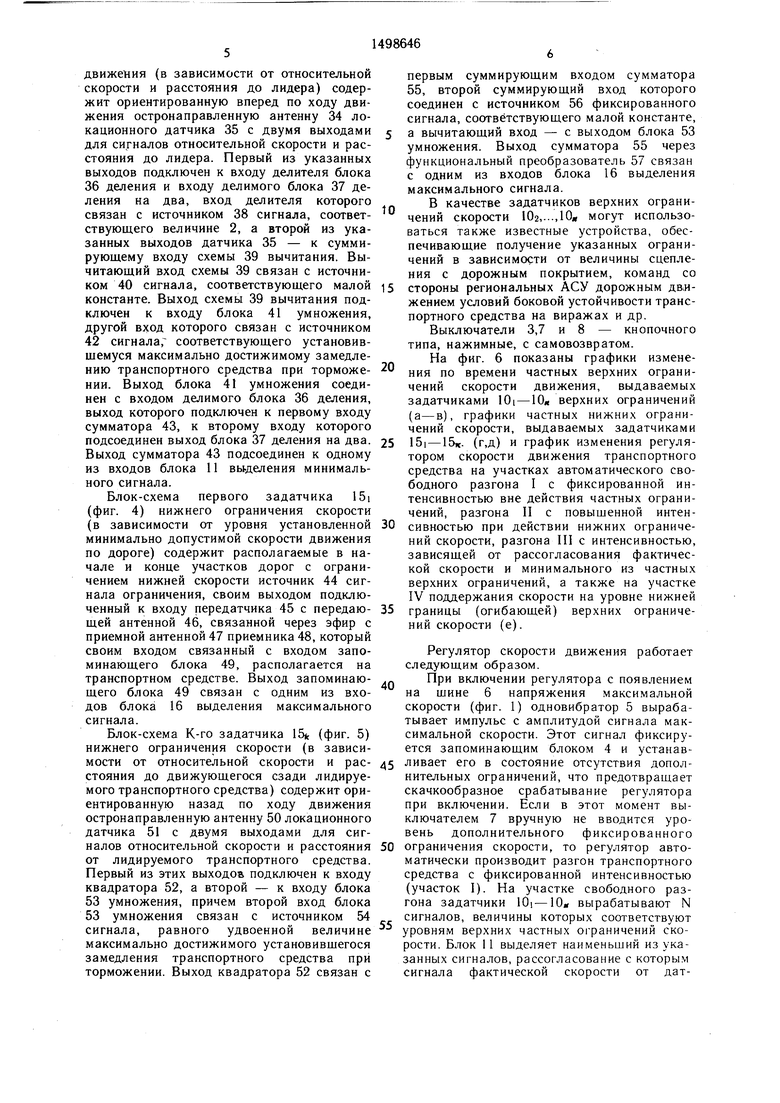
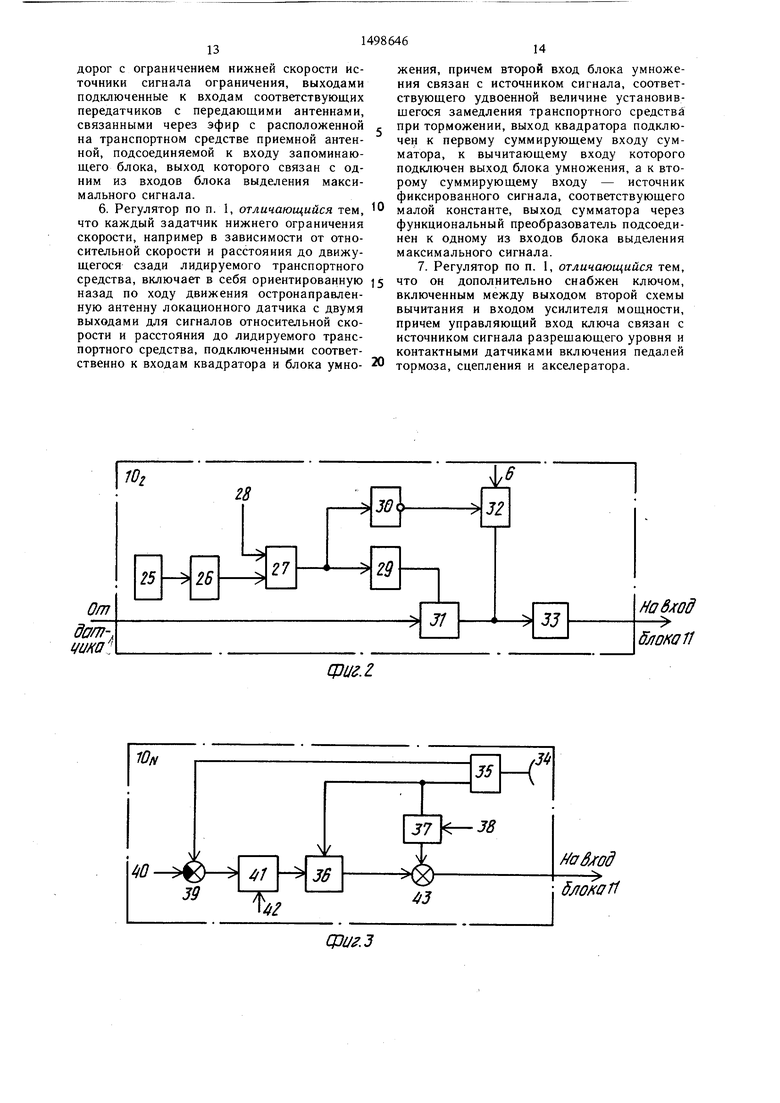
Блок-схема дополнительного задатчика 102 (фиг. 2) верхнего ограничения скорости (в зависимости от уровня вертикальной составляющей вибраций транспортного средства) содержит датчик 25 вертикальных вибраций транспортного средства, выход которого связан с входом фильтра 26 нижних частот, подключенного выходом к первому входу компаратора 27. Второй вход последнего связан с источником 28 сигнала фиксированного уровня, а выход - с входами одновибратора 29 и инвертора 30. Выход одновибратора 29 подсоединен к управляющему входу первого ключа 31, информационный вход которого связан с выходом датчика 1 скорости. Выход одновибратора 30 подключен к управляющему входу второго ключа 32, к информационному входу которого подсоединен источник 6 сигнала максимальной скорости. Выходы ключей 31 и 32 подключены к входу запоминающего блока 33, выход которого связан с одним из входов блока 11 выделения минимального сигнала.
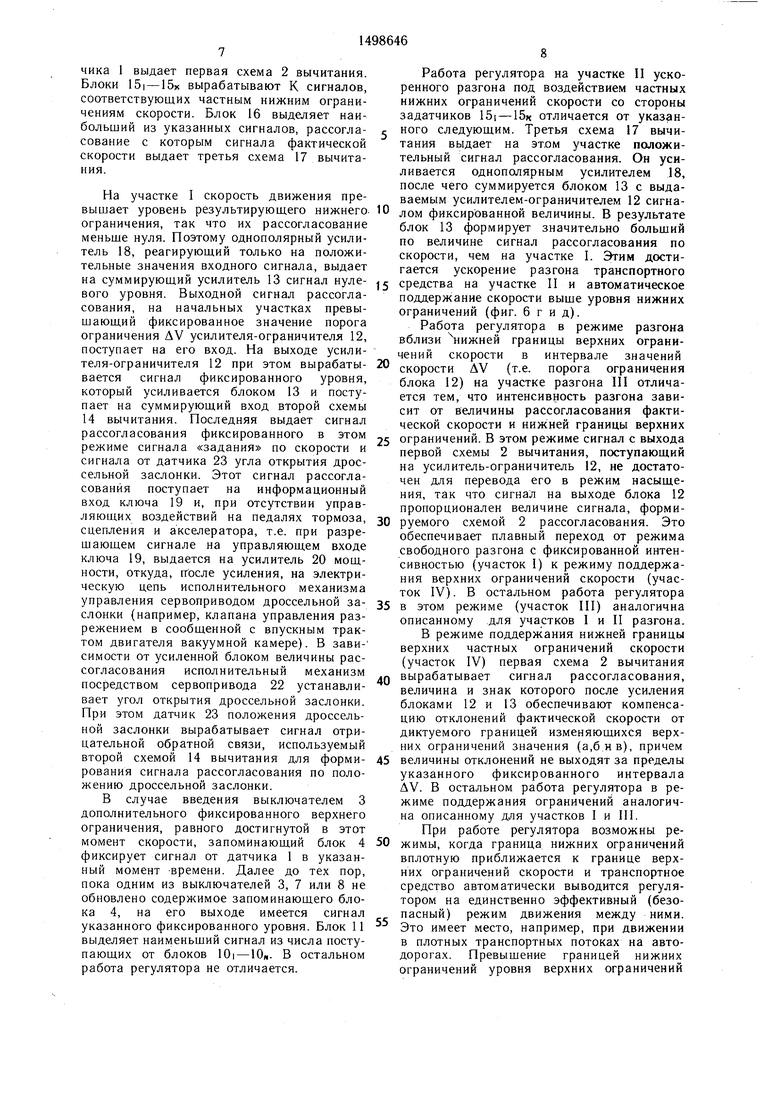
Блок-схема задатчика 10 (фиг. 3) верхнего ограничения скорости по условиям
движения (в зависимости от относительной скорости и расстояния до лидера) содержит ориентированную вперед по ходу движения остронаправленную антенну 34 локационного датчика 35 с двумя выходами для сигналов относительной скорости и расстояния до лидера. Первый из указанных выходов подключен к входу делителя блока 36 деления и входу делимого блока 37 деления на два, вход делителя которого связан с источником 38 сигнала, соответствующего величине 2, а второй из указанных выходов датчика 35 - к суммирующему входу схемы 39 вычитания. Вычитающий вход схемы 39 связан с источником 40 сигнала, соответствующего малой константе. Выход схемы 39 вычитания подключен к входу блока 41 умножения, другой вход которого связан с источником 42 сигнала, соответствующего установив- щемуся максимально достижимому замедлению транспортного средства при торможении. Выход блока 41 умножения соединен с входом делимого блока 36 деления, выход которого подключен к первому входу сумматора 43, к второму входу которого подсоединен выход блока 37 деления на два. Выход сумматора 43 подсоединен к одному из входов блока 11 выделения минимального сигнала.
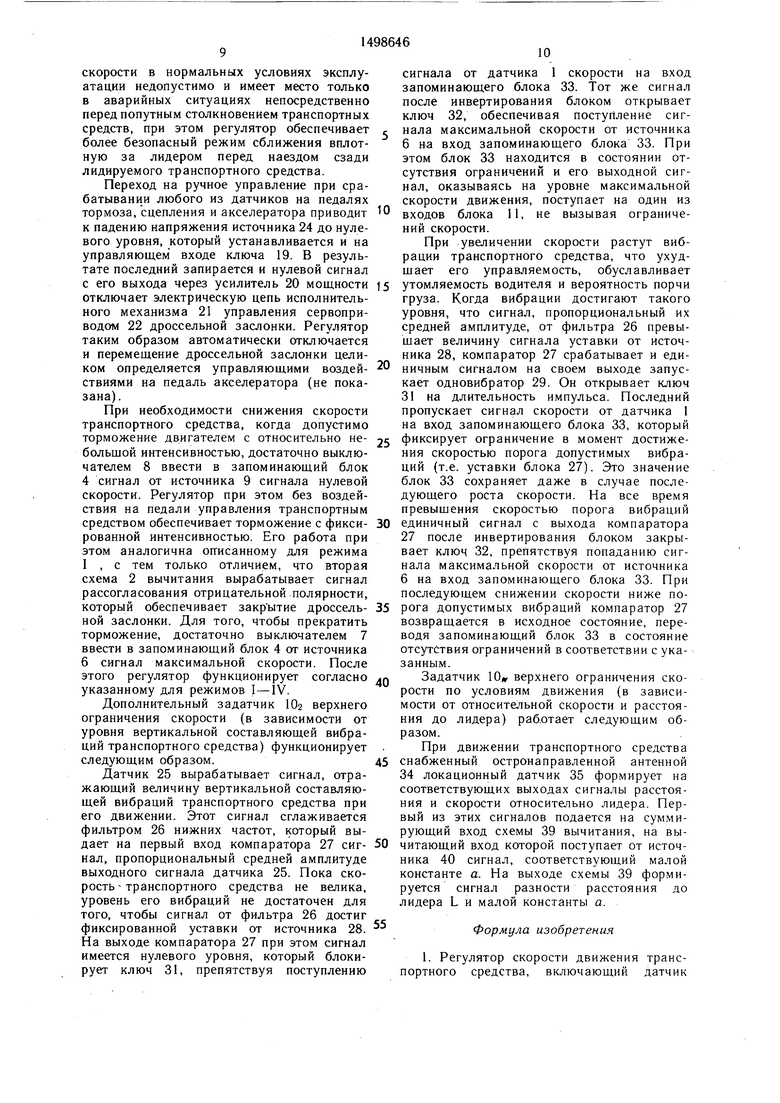
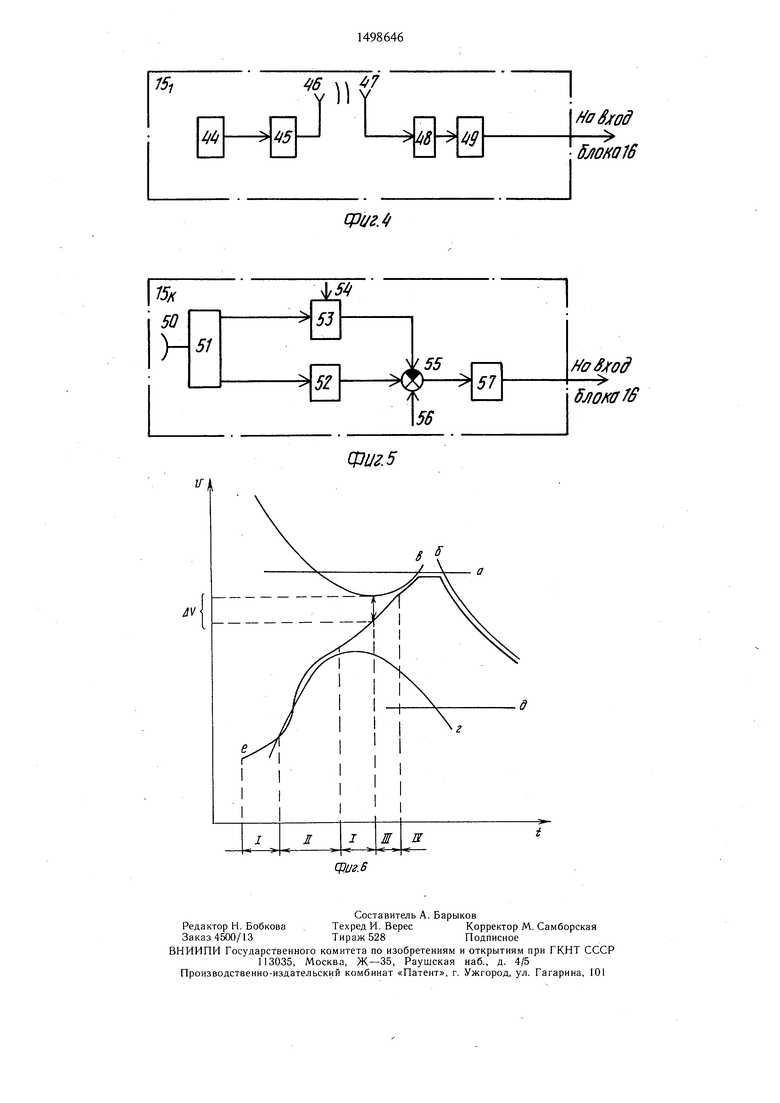
Блок-схема первого задатчика 15i (фиг. 4) нижнего ограничения скорости (в зависимости от уровня установленной минимально допустимой скорости движения по дороге) содержит располагаемые в начале и конце участков дорог с ограничением нижней скорости источник 44 сигнала ограничения, своим выходом подключенный к входу передатчика 45 с передающей антенной 46, связанной через эфир с приемной антенной 47 приемника 48, который своим входом связанный с входом запоминающего блока 49, располагается на транспортном средстве. Выход запоминающего блока 49 связан с одним из входов блока 16 выделения максимального сигнала.
Блок-схема К-го задатчика 15fc (фиг. 5) нижнего ограничения скорости (в зависимости от относительной скорости и расстояния до движующегося сзади лидируе- мого транспортного средства) содержит ориентированную назад по ходу движения остронаправленную антенну 50 локационного датчика 51 с двумя выходами для сигналов относительной скорости и расстояния от лидируемого транспортного средства. Первый из этих выходоа подключен к входу квадратора 52, а второй - к входу блока 53 умножения, причем второй вход блока 53 умножения связан с источником 54 сигнала, равного удвоенной величине максимально достижимого установившегося замедления транспортного средства при торможении. Выход квадратора 52 связан с
0
первым суммирующим входом сумматора 55, второй суммирующий вход которого соединен с источником 56 фиксированного сигнала, соответствующего малой константе, а вычитающий вход - с выходом блока 53 умножения. Выход сумматора 55 через функциональный преобразователь 57 связан с одним из входов блока 16 выделения максимального сигнала.
В качестве задатчиков верхних ограничений скорости 102,...,10я могут использоваться также известные устройства, обеспечивающие получение указанных ограничений в зависимости от величины сцепления с дорожным покрытием, команд со
5 стороны региональных АСУ дорожным дв.и- жением условий боковой устойчивости транспортного средства на виражах и др.
Выключатели 3,7 и 8 - кнопочного типа, нажимные, с самовозвратом.
На фиг. 6 показаны графики измене- ния по времени частных верхних ограничений скорости движения, выдаваемых задатчиками lOi-10 верхних ограничений (а-в), графики частных нижних ограничений скорости, выдаваемых задатчиками
5 15| - 15it. (г,д) и график изменения регулятором скорости движения транспортного средства на участках автоматического свободного разгона I с фиксированной интенсивностью вне действия частных ограничений, разгона II с повышенной интен0 сивностью при действии нижних ограничений скорости, разгона III с интенсивностью, зависящей от рассогласования фактической скорости и минимального из частных верхних ограничений, а также на участке IV поддержания скорости на уровне нижней
5 границы (огибающей) верхних ограничений скорости (е).
Регулятор скорости движения работает следующим образом.
Q При включении регулятора с появлением на шине 6 напряжения максимальной скорости (фиг. 1) одновибратор 5 вырабатывает импульс с амплитудой сигнала максимальной скорости. Этот сигнал фиксируется запоминающим блоком 4 и устанав5 ливает его в состояние отсутствия дополнительных ограничений, что предотвращает скачкообразное срабатывание регулятора при включении. Если в этот момент выключателем 7 вручную не вводится уровень дополнительного фиксированного
0 ограничения скорости, то регулятор автоматически производит разгон транспортного средства с фиксированной интенсивностью (участок I). На участке свободного разгона задатчики Id-10« вырабатывают N сигналов, величины которых соответствуют уровням верхних частных ограничений скорости. Блок 11 выделяет наименьший из указанных сигналов, рассогласование с которым сигнала фактической скорости от датчика 1 выдает первая схема 2 вычитания. Блоки 15| - 15х вырабатывают К сигналов, соответствующих частным нижним ограничениям скорости. Блок 16 выделяет наибольший из указанных сигналов, рассогласование с которым сигнала фактической скорости выдает третья схема 17 вычитания.
На участке I скорость движения превышает уровень результируюш,его нижнего, ограничения, так что их рассогласование меньше нуля. Поэтому однополярный усилитель 18, реагируюш,ий только на положительные значения входного сигнала, выдает на суммирующий усилитель 13 сигнал нулевого уровня. Выходной сигнал рассогласования, на начальных участках превы- шаюш,ий фиксированное значение порога ограничения AV усилителя-ограничителя 12, поступает на его вход. На выходе усилителя-ограничителя 12 при этом вырабатывается сигнал фиксированного уровня, который усиливается блоком 13 и поступает на суммирующий вход второй схемы 14 вычитания. Последняя выдает сигнал рассогласования фиксированного в этом режиме сигнала «задания по скорости и сигнала от датчика 23 угла открытия дроссельной заслонки. Этот сигнал рассогласования поступает на информационный вход ключа 19 и, при отсутствии управляющих воздействий на педалях тормоза, сцепления и акселератора, т.е. при разрешающем сигнале на управляющем входе ключа 19, выдается на усилитель 20 мощности, откуда, п осле усиления, на электрическую цепь исполнительного механизма управления сервоприводом дроссельной заслонки (например, клапана управления разрежением в сообщенной с впускным трактом двигателя вакуумной камере). В зави- симости от усиленной блоком величины рассогласования исполнительный механизм посредством сервопривода 22 устанавливает угол открытия дроссельной заслонки. При этом датчик 23 положения дроссельной заслонки вырабатывает сигнал отрицательной обратной связи, используемый второй схемой 14 вычитания для формирования сигнала рассогласования по положению дроссельной заслонки.
В случае введения выключателем 3 дополнительного фиксированного верхнего ограничения, равного достигнутой в этот момент скорости, запоминающий блок 4 фиксирует сигнал от датчика 1 в указанный момент -времени. Далее до тех пор, пока одним из выключателей 3, 7 или 8 не обновлено содержимое запоминающего блока 4, на его выходе имеется сигнал указанного фиксированного уровня. Блок 11 выделяет наименьший сигнал из числа поступающих от блоков 10| - Юн- В остальном работа регулятора не отличается.
Работа регулятора на участке II ускоренного разгона под воздействием частных нижних ограничений скорости со стороны задатчиков 15i - 15к отличается от указанного следующим. Третья схема 17 вычитания выдает на этом участке положительный сигнал рассогласования. Он усиливается однополярным усилителем 18, после чего суммируется блоком 13 с выдаваемым усилителем-ограничителем 12 сигна лом фиксированной величины. В результате блок 13 формирует значительно больший по величине сигнал рассогласования по скорости, чем на участке I. Этим достигается ускорение разгона транспортного
средства на участке II и автоматическое поддержание скорости выше уровня нижних ограничений (фиг. 6 г и д).
Работа регулятора в режиме разгона вблизи нижней границы верхних ограничений скорости в интервале значений
скорости AV (т.е. порога ограничения блока 12) на участке разгона III отличается тем, что интенсивность разгона зависит от величины рассогласования фактической скорости и нижней границы верхних
5 ограничений. В этом режиме сигнал с выхода первой схемы 2 вычитания, поступающий на усилитель-ограничитель 12, ие достаточен для перевода его в режим насыщения, так что сигнал на выходе блока 12 пропорционален величине сигнала, форми0 руемого схемой 2 рассогласования. Это обеспечивает плавный переход от режима свободного разгона с фиксированной интенсивностью (участок I) к режиму поддержания верхних ограничений скорости (участок IV). В остальном работа регулятора
5 в этом режиме (участок III) аналогична
описанному для участков I и II разгона.
В режиме поддержания нижней границы
верхних частных ограничений скорости
(участок IV) первая схема 2 вычитания
п вырабатывает сигнал рассогласования, величина и знак которого после усиления блоками 12 и 13 обеспечивают компенсацию отклонений фактической скорости от диктуемого границей изменяющихся верхних ограничений значения (а,бив), причем
5 величины отклонений не выходят за пределы указанного фиксированного интервала AV. В остальном работа регулятора в режиме поддержания ограничений аналогична описанному для участков I и III.
При работе регулятора возможны ре0 жимы, когда граница нижних ограничений вплотную приближается к границе верхних ограничений скорости и транспортное средство автоматически выводится регулятором на единственно эффективный (безопасный) режим движения между ними. Это имеет место, например, при движении в плотных транспортных потоках на автодорогах. Превышение границей нижних ограничений уровня верхних ограничений
5
скорости в нормальных условиях эксплуатации недопустимо и имеет место только в аварийных ситуациях непосредственно перед попутным столкновением транспортных средств, при этом регулятор обеспечивает , более безопасный режим сближения вплотную за лидером перед наездом сзади лидируемого транспортного средства.
Переход на ручное управление при срабатывании любого из датчиков на педалях тормоза, сцепления и акселератора приводит к падению напряжения источника 24 до нулевого уровня, который устанавливается и на управляющем входе ключа 19. В результате последний запирается и нулевой сигнал
10
сигнала от датчика 1 скорости на вход запоминающего блока 33. Тот же сигнал после инвертирования блоком открывает ключ 32, обеспечивая поступление сигнала максимальной скорости от источника 6 на вход запоминающего блока 33. При этом блок 33 находится в состоянии отсутствия ограничений и его выходной сигнал, оказываясь на уровне максимальной скорости движения, поступает на один из входов блока 11, не вызывая ограничений скорости.
При увеличении скорости растут вибрации транспортного средства, что ухудщает его управляемость, обуславливает с его выхода через усилитель 20 мощности15 утомляемость водителя и вероятность порчи отключает электрическую цепь исполнитель-груза. Когда вибрации достигают такого ного механизма 21 управления сервопри-уровня, что сигнал, пропорциональный их водом 22 дроссельной заслонки. Регуляторсредней амплитуде, от фильтра 26 превы- таким образом автоматически отключаетсящает величину сигнала уставки от источ- и перемещение дроссельной заслонки цели-ника 28, компаратор 27 срабатывает и еди- ком определяется управляющими воздей-20 ничным сигналом на своем выходе запус- ствиями на педаль акселератора (не пока-кает одновибратор 29. Он открывает ключ зана).31 на длительность импульса. Последний При необходимости снижения скоростипропускает сигнал скорости от датчика 1 транспортного средства, когда допустимона вход запоминающего блока 33, который торможение двигателем с относительно не-25 фиксирует ограничение в момент достиже- больщой интенсивностью, достаточно выклю-ния скоростью порога допустимых вибра- чателем 8 ввести в запоминающий блокций (т.е. уставки блока 27). Это значение 4 сигнал от источника 9 сигнала нулевойблок 33 сохраняет даже в случае после- скорости. Регулятор при этом без воздей-дующего роста скорости. На все время ствия на педали управления транспортнымпревыщения скоростью порога вибраций средством обеспечивает торможение с фикси-30 единичный сигнал с выхода компаратора рованной интенсивностью. Его работа при27 после инвертирования блоком закры- этом аналогична описанному для режимавает ключ 32, препятствуя попаданию сиг- I , с тем только отличием, что втораянала максимальной скорости от источника схема 2 вычитания вырабатывает сигнал6 на вход запоминающего блока 33. При рассогласования отрицательной полярности,последующем снижении скорости ниже по- который обеспечивает закрь1тие дроссель-35 рога допустимых вибраций компаратор 27 ной заслонки. Для того, чтобы прекратитьвозвращается в исходное состояние, переторможение, достаточно выключателем 7 ввести в запоминающий блок 4 от источника 6 сигнал максимальной скорости. После этого регулятор функционирует согласно дп указанному для режимов I-IV.
Дополнительный задатчик 102 верхнего ограничения скорости (в зависимости от уровня вертикальной составляющей вибраций транспортного средства) функционирует
следующим образом.
Датчик 25 вырабатывает сигнал, отражающий величину вертикальной составляющей вибраций транспортного средства при его движении. Этот сигнал сглаживается фильтром 26 нижних частот, который выводя запоминающий блок 33 в состояние отсутствия ограничений в соответствии с указанным.
Задатчик 10 верхнего ограничения скорости по условиям движения (в зависимости от относительной скорости и расстояния до лидера) работает следующим образом.
При движении транспортного средства
45 снабженный остронаправленной антенной 34 локационный датчик 35 формирует на соответствующих выходах сигналы расстояния и скорости относительно лидера. Первый из этих сигналов подается на суммирующий вход схемы 39 вычитания, на выдает на первый вход компаратора 27 сиг- 50 читающий вход которой поступает от источ- нал, пропорциональный средней амплитуде ника 40 сигнал, соответствующий малой выходного сигнала датчика 25. Пока скорость транспортного средства не велика, уровень его вибраций не достаточен для того, чтобы сигнал от фильтра 26 достиг фиксированной уставки от источника 28. На выходе компаратора 27 при этом сигнал имеется нулевого уровня, который блокирует ключ 31, препятствуя поступлению
константе а. На выходе схемы 39 формируется сигнал разности расстояния до лидера L и малой константы а.
Формула изобретения
. Регулятор скорости движения транспортного средства, включающий датчик
сигнала от датчика 1 скорости на вход запоминающего блока 33. Тот же сигнал после инвертирования блоком открывает ключ 32, обеспечивая поступление сигнала максимальной скорости от источника 6 на вход запоминающего блока 33. При этом блок 33 находится в состоянии отсутствия ограничений и его выходной сигнал, оказываясь на уровне максимальной скорости движения, поступает на один из входов блока 11, не вызывая ограничений скорости.
При увеличении скорости растут вибрации транспортного средства, что ухудщает его управляемость, обуславливает утомляемость водителя и вероятность порчи груза. Когда вибрации достигают такого уровня, что сигнал, пропорциональный их средней амплитуде, от фильтра 26 превы- щает величину сигнала уставки от источ- ника 28, компаратор 27 срабатывает и еди- ничным сигналом на своем выходе запус- кает одновибратор 29. Он открывает ключ 31 на длительность импульса. Последний пропускает сигнал скорости от датчика 1 на вход запоминающего блока 33, который фиксирует ограничение в момент достиже- ния скоростью порога допустимых вибра- ций (т.е. уставки блока 27). Это значение блок 33 сохраняет даже в случае после- дующего роста скорости. На все время превыщения скоростью порога вибраций единичный сигнал с выхода компаратора 27 после инвертирования блоком закры- вает ключ 32, препятствуя попаданию сиг- нала максимальной скорости от источника 6 на вход запоминающего блока 33. При последующем снижении скорости ниже по- рога допустимых вибраций компаратор 27 возвращается в исходное состояние, перещает его управляемость, обуславливает утомляемость водителя и вероятность порчи груза. Когда вибрации достигают такого уровня, что сигнал, пропорциональный их средней амплитуде, от фильтра 26 превы- щает величину сигнала уставки от источ- ника 28, компаратор 27 срабатывает и еди- ничным сигналом на своем выходе запус- кает одновибратор 29. Он открывает ключ 31 на длительность импульса. Последний пропускает сигнал скорости от датчика 1 на вход запоминающего блока 33, который фиксирует ограничение в момент достиже- ния скоростью порога допустимых вибра- ций (т.е. уставки блока 27). Это значение блок 33 сохраняет даже в случае после- дующего роста скорости. На все время превыщения скоростью порога вибраций единичный сигнал с выхода компаратора 27 после инвертирования блоком закры- вает ключ 32, препятствуя попаданию сиг- нала максимальной скорости от источника 6 на вход запоминающего блока 33. При последующем снижении скорости ниже по- рога допустимых вибраций компаратор 27 возвращается в исходное состояние, пере
водя запоминающий блок 33 в состояние отсутствия ограничений в соответствии с указанным.
Задатчик 10 верхнего ограничения скорости по условиям движения (в зависимости от относительной скорости и расстояния до лидера) работает следующим образом.
При движении транспортного средства
снабженный остронаправленной антенной 34 локационный датчик 35 формирует на соответствующих выходах сигналы расстояния и скорости относительно лидера. Первый из этих сигналов подается на суммирующий вход схемы 39 вычитания, на вычитающий вход которой поступает от источ- ника 40 сигнал, соответствующий малой
читающий вход которой поступает от источ- ника 40 сигнал, соответствующий малой
константе а. На выходе схемы 39 формируется сигнал разности расстояния до лидера L и малой константы а.
Формула изобретения
читающий вход которой поступает от источ- ника 40 сигнал, соответствующий малой
. Регулятор скорости движения транспортного средства, включающий датчик
скорости движения, выход которого подключен к вычитающему входу первой схемы вычитания и к входу первого задатчика верхнего ограничения скорости, выполненного в виде последовательно соединенных первого выключателя и запоминающего блока, вторую схему вычитания, выход которой через усилитель мощности подключен к электрической цепи исполнительного механизма управления сервоприводом дроссельной заслонки, с которым механически связан входом датчик положения дроссельной заслонки, выход которого подключен к вычитающему входу второй схемы вычитания, отличающийся тем, что, с целью расширения функциональных возможностей путем автоматического учета при регулировании нескольких частных верхних и нижних ограничений и обеспечения автоматического разгона транспортного средства до границы верхних ограничений скорости, он снабжен по крайней мере одним дополнительным задатчиком верхнего ограничения скорости, задатчнками верхних ограничений скорости по условиям движения, блоком выделения минимального сигнала, задатчиками нижних ограничений скорости, блоком выделения максимального сигнала, третьей схемой вычитания, одно- полярным усилителем, усилителем-ограничителем, .суммирующим усилителем и ключом, причем первый задатчик верхнего ограничения скорости снабжен элементами управления, дополнительный задатчик верхнего ограничения скорости связан входом с выходом датчика скорости, выходы запоминающего блока первого задатчика верхнего ограничения скорости, дополнительного задатчика верхнего ограничения скорости и задатчиков верхних ограничений скорости по условиям движения подключены к входам блока выделения минимального сигнала, выход которого подключен к суммирующему входу первой схемы вычитания, выход которой через усилитель-ограничитель связан с первым входом суммирующего усилителя, выходом подсоединенного к суммирующему входу второй схемы вычитания, а выходы задатчиков нижних ограничений скорости подсоединены к входам блока выделения максимального сигнала, выходом подключенного к суммирующему входу третьей схемы вычитания, выход которой через однополярный усилитель связан с вторым входом суммирующего усилителя, причем к вычитающему входу третьей схемы вычитания подключен выход датчика скорости.
источнику сигнала фиксированного уровня, а выход - к входам одновибратора н инвертора, связанных выходами с входами управления соответственно первого и второго ключей, причем к информационному входу первого ключа подсоединен выход
0 датчика скорости, а к информационному входу второго ключа - источник сигнала максимальной скорости, при этом выходы ключей подсоединены к входу запоминающего блока, выход которого связан с одним
5 из входов блока выделения минимального сигнала.
5 из которых подключен к входу делителя блока деления и входу делимого блока деления на два, вход делителя которого связан с источником опорного сигнала, а второй - к суммирующему входу схемы
Q вычитания, к вычитающему входу которой подсоединен источник фиксированного сигнала, соответствующего малой константе, выход схемы вычитания подключен к первому входу блока умножения, второй вход которого связан с источником сигнала,
5 соответствующего установивщемуся максимально достижимому замедлению транспортного средства при торможении, причем выход блока умножения связан с входом делимого блока деления, выход которого подключен к первому входу сумматора,
0 к второму входу которого подсоединен выход блока деления на два, выход сумматора связан с одним из входов блока выделения минимального сигнала.
скорости, например в зависимости от уровня установленной минимально допустимой скорости движения по дороге, включает в себя размещенные в начале и конце участков
дорог с ограничением нижней скорости источники сигнала ограничения, выходами подключенные к входам соответствующих передатчиков с передающими антеннами, связанными через эфир с расположенной , на транспортном средстве приемной антенной, подсоединяемой к входу запоминающего блока, выход которого связан с одним из входов блока выделения максимального сигнала.
ственно к входам квадратора и блока умно- тормоза, сцепления и акселератора.
70
Wtf.Z
Фи.з
жения, причем второй вход блока умножения связан с источником сигнала, соответствующего удвоенной величине установив- щегося замедления транспортного средства при торможении, выход квадратора подключен к первому суммирующему входу сумматора, к вычитающему входу которого подключен выход блока умножения, а к второму суммирующему входу - источник фиксированного сигнала, соответствующего малой константе, выход сумматора через функциональный преобразователь подсоединен к одному из входов блока выделения максимального сигнала.
xU
Фиг.
Фиг. 5
й
| Патент США № 3648798, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
