Изобретение относится к области виброзащитной техники и может быть использовано для стабилизации в плоскости горизонта мобильных лидаров (объектов), расположенных на автомобилях, и для защиты их от внешних вибрационных механических воздействий, от работающего двигателя автомобиля, служащего генератором электропитания, а также функционально связанных с лидаром систем (навигации, телевизионной, газоанализа, метеосистемы, информационной).
Известно устройство пассивной силовой гиростабилизации для гашения колебаний корабля относительно оси крена (История механики гироскопических систем. М.: Наука, 1975, с.83), выбранное в качестве прототипа, содержащее двухстепенной гироскоп, вектор кинетического момента которого направлен вдоль вертикали места. По оси рамки одноосного подвеса гиродвигателя установлен тормоз для успокоения колебаний рамки подвеса, снизу рамки установлен груз для придания маятниковости системе стабилизации.
По своему принципу работы это устройство уменьшает амплитуду колебаний, а не устраняет, причем уменьшение колебаний объекта эффективно на низких частотах (доли герца).
В силу указанных недостатков это устройство не может быть применено в качестве гиростабилизатора лидара в плоскости горизонта.
Задачей изобретения является создание простого устройства гироскопической стабилизации лидара в плоскости горизонта и повышение точности направления линии прицела лидара в пространстве в рабочем режиме при зондировании объектов.
Поставленная задача решена за счет того, что в устройстве гироскопической стабилизации лидара в плоскости горизонта, также как в прототипе, содержащем подвес, обладающий маятниковостью и на котором установлен гиродвигатель с вектором кинетического момента, направленным вдоль вертикали места, согласно изобретению подвес, выполненный из верхнего и нижнего колец, соединенных укосинами, установлен на основании на ортогонально расположенных упруго-вязких опорах, состоящих из упругих элементов и параллельно установленных жидкостных демпферах, при этом на нижнем кольце установлен гиродвигатель с вектором кинетического момента, направленным по вертикали места.
Предлагаемое устройство позволяет обеспечить стабилизацию объекта в плоскости горизонта вследствие установки упругих элементов бескарданова подвеса, обеспечивающих возможность малого углового перемещения рамы по двум ортогональным осям. При угловой скорости корпуса с лидаром возникает момент гироскопической реакции, направленный противоположно моменту, вызванному внешними воздействиями. В отличие от прототипа, карданов подвес заменен ортогонально расположенными четырьмя упругими элементами и демпферами, на которые установлен лидар с корпусом. Эти упругие элементы с демпферами дают возможность малого углового перемещения аналогично угловым поворотам относительно осей рамок карданова подвеса.
Предложенное устройство гироскопической стабилизации лидара в плоскости горизонта позволяет:
1. Удерживать объект стабилизации строго вдоль вертикали места за счет маятниковости рамы и использования гироскопического эффекта.
2. Демпфировать колебания объекта стабилизации посредством упругих элементов и демпферов и наличия гироскопического момента стабилизации при возникновении угловой скорости корпуса.
3. Устранять колебания линии прицела лидара в диапазоне частот, возникающих при работе двигателя автомобиля на холостом ходу.
Для пояснения предлагаемого устройства на чертеже приведена его схема.
На этой схеме условно не показано крепление узлов упруго-вязкого подвеса в основании, а также сама конструкция упруго-вязких элементов и конструкции оптической системы. Вышеизложенное не мешает пониманию сущности принципа работы предлагаемого устройства стабилизации объекта в плоскости горизонта.
В составе лидара 1 входят два телескопа: излучатель и приемник. Оптические элементы телескопов установлены на корпусе 2, представляющем гироскопической стабилизации рамную конструкцию. В состав корпуса 2 входят верхнее 3 и нижнее 4 кольца, связанные между собой укосинами 5.
Лидар 1 установлен на верхнее кольцо 3 корпуса 2, кольцо 3 через упругие элементы - пружины 6 - и демпферы 7 закреплено на кронштейне 8, закрепленном в свою очередь на основании 9 автомобиля 10.
Упругие элементы могут представлять собой, например, многожильную винтовую пружину сжатия, имеющую более пологую характеристику при малых габаритах или рессору по типу автомобильной.
Демпфер 7 представляет типовую конструкцию жидкостного демпфирующего устройства линейного типа. Он состоит из корпуса 11 в форме цилиндра, закрепленного на кольце 3 корпуса 2. Поршень 12 имеет возможность перемещаться линейно в корпусе 11 демпфера 7, при этом поршень 12 связан с кронштейном 8 через развязывающее устройство, позволяющее этому поршню иметь небольшие угловые перемещения в корпусе 11 демпфера. Внутренняя полость корпуса 11 демпфера 7 заполнена вязкой (например, полисилоксановой) жидкостью.
Таким образом, лидар 1 и оптическая система, установленные на корпусе 2, связаны с кронштейном 8 через упруго-вязкие связи. В свою очередь основание 9 крепится к полу салона автомобиля 10.
Маятниковая система, состоящая из лидара 1, оптических элементов корпуса 2, имеет центр масс (ц.м.) ниже плоскости установки упругих элементов 6 и демпферов 7.
К нижнему кольцу 4 крепится электродвигатель 12, на валу которого установлен маховик для генерирования кинетического момента Н, обеспечивающего гироскопическую силовую стабилизацию маятниковой системы.
В процессе транспортирования для исключения поломок элементов подвижной части от соударения с кронштейнами 8 установлен транспортный арретир 13 (показан на чертеже условно), который жестко фиксирует в пространстве подвижную часть механической системы.
Предлагаемое устройство работает следующим образом.
В рабочем режиме лидара 1 на него действуют вибрационные механические нагрузки от работающего двигателя автомобиля, который служит генератором электропитания функционально связанных с лидаром систем (навигации, газоанализа, информационной, телевизионной, метеосистемы).
Из-за наличия маятниковости механической системы (лидар 1 - корпус 2) в любой момент времени обеспечивается вертикальное положение этой механической системы вдоль вертикали места. Введение в конструкцию подвеса рамы упругих элементов 6 и демпферов 7 позволяет производить гашение колебаний от внешних механических воздействий, например от работы двигателя автомобиля на холостом ходу в рабочем режиме лидара 1.
Дополнительно, наличие электродвигателя 14 с закрепленным на его валу маховиком, генерирующим кинетический момент Н, позволяет повысить эффективность стабилизации механической системы (лидар 1 - корпус 2) за счет введения гироскопической стабилизации.
В данном устройстве динамика работы механической системы (лидар-рама) описывается системой дифференциальных уравнений:


где JαJβ - моменты инерции рамы с лидаром относительно ортогональных осей установки упруго-вязких опор,
μαμβ - коэффициенты демпфирования по ортогональным направлениям,
κακβ - коэффициент жесткости опор рамы по ортогональным направлениям,
 - угловые ускорения,
- угловые ускорения,
 - угловые скорости,
- угловые скорости,
αβ - углы корпуса с лидаром по осям ортогональных направлений,
Н - кинетический момент,
МвαМвβ - амплитуды моментов внешних воздействий по ортогональным осям,
q - частота внешнего воздействия,
Р - вес корпуса с лидаром,
l - расстояние от центра массы до оси расположения упруго-вязких опор.
Амплитуда вынужденных колебаний рамы с лидаром по ортогональным направлениям определяется решением вышеуказанной системы дифференциальных уравнений по каждому из направлений.


Из данных выражений следует, что амплитуда колебаний будет тем меньше, чем больше кинетический момент Н, а также коэффициент демпфирования.
Таким образом, предлагаемое устройство позволяет решить задачу устранения влияния внешних вибрационных механических воздействий на положение линии прицела лидара при зондировании объектов, так как в рабочем режиме лидара внешние вибрационные механические воздействия будут одновременно гаситься:
1. В упругих элементах, работающих как фильтр частот, за счет существенной разницы собственной низкой частоты подвешенного механического маятника, роль которого выполняет корпус с закрепленным на нем лидаром и электродвигателем, а также гасится в параллельно установленных вязких демпферах.
2. За счет непосредственной силовой гироскопической стабилизации, вследствие наличия кинетического момента, генерируемого вращающимся маховиком, установленным на валу электродвигателя.
При этом следует иметь в виду, что в рабочем режиме лидара имеем случай малых колебаний, когда собственная частота маятника не зависит от амплитуды колебаний, что дополнительно повышает эффективность предлагаемой пассивной системы гироскопической стабилизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИДАРА В ПЛОСКОСТИ ГОРИЗОНТА | 2007 |
|
RU2335673C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| НАБЛЮДАТЕЛЬНЫЙ ПРИБОР СО СТАБИЛИЗАЦИЕЙ И ЦИФРОВОЙ ФОТОРЕГИСТРАЦИЕЙ | 2010 |
|
RU2442199C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| Гировертикаль | 1989 |
|
SU1789858A1 |
Изобретение относится к области виброзащитной техники и может быть использовано для стабилизации в плоскости горизонта мобильных лидаров (объектов), расположенных на автомобилях, и для защиты их от внешних вибрационных механических воздействий, от работающего двигателя автомобиля, служащего генератором электропитания, а также функционально связанных с лидаром систем (навигации, телевизионных, газового анализа, метеосистем). Подвес устройства гироскопической стабилизации выполнен из верхнего и нижнего колец, соединенных укосинами, и установлен на основании на упруго-вязких опорах, состоящих из упругих элементов и параллельно установленных жидкостных демпферов. На нижнем кольце подвеса установлен гиродвигатель с вектором кинетического момента, направленным вдоль вертикали места. Техническим результатом является упрощение устройства и повышение точности направления линии прицела лидара в пространстве в рабочем режиме при зондировании объектов. 1 ил.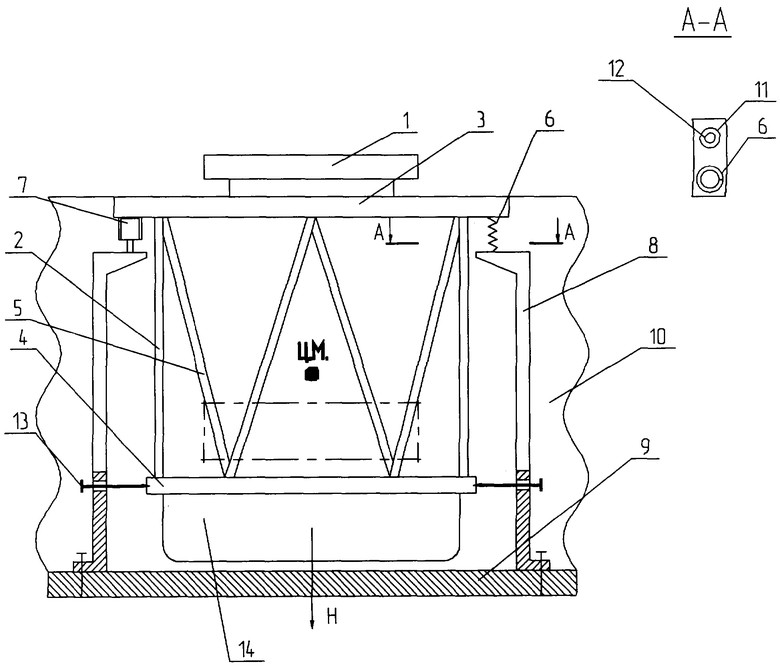
Устройство гироскопической стабилизации лидара в плоскости горизонта, содержащее подвес, обладающий маятниковостью и на котором установлен гиродвигатель с вектором кинетического момента, направленным вдоль вертикали места, отличающееся тем, что подвес, выполненный из верхнего и нижнего колец, соединенных укосинами, установлен на основании на ортогонально расположенных упруговязких опорах, состоящих из параллельно попарно установленных упругих элементов и жидкостных демпферов, при этом на нижнем кольце установлен гиродвигатель с вектором кинетического момента, направленным по вертикали места, а лидар установлен на верхнее кольцо.
| РИВКИН С.С | |||
| Непосредственные гиростабилизаторы | |||
| В сб | |||
| История механики гироскопических систем | |||
| - М.: Наука, 1975, с.83-84 | |||
| Устройство приведения гиростабилизированной платформы в горизонт | 1990 |
|
SU1820215A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| Система стабилизации кузова транспортного средства | 1977 |
|
SU789308A1 |
| Взрывонепроницаемый подшипниковый узел электрической машины | 1984 |
|
SU1179481A1 |

