Изобретение относится к приборам систем ориентации космических аппаратов (КЛА), а более точно к силовым гироскопическим стабилизаторам, и может быть использовано в космической технике.
Известны двухстепенные гиростабилизаторы (ГС), состоящие из двигателя-маховика, датчика угла, демпфирующего узла и других устройств, формирующих регулирующий управляющий момент (см., например, авт. св. СССР №1839925, 2006). В случае ограниченного угла поворота гироскопа ГС и регулируемого кинетического момента управления угловым положением КЛА проводится по двум координатным осям. При размещении двух двухстепенных ГС на КЛА таким образом, чтобы векторы кинетического момента гироскопов были параллельны, а оси подвесов перпендикулярны, управление угловым положением КЛА будет вестись по 3 осям.
В известных конструкциях ГС для устранения инерционной нагрузки на моментное устройство проводится балансировка двигателя-маховика относительно оси вращения в подвесе, т.е. центр масс подвижной части лежит на оси вращения. Вследствие этого совмещение двух двухстепенных ГС в одном блоке практически трудно осуществимо, поэтому их выполняют отдельными блоками и располагают в разных местах рамы КЛА. Из-за этого ухудшается взаимное базирование осей ГС относительно друг друга и объекта. Также возрастают масса и габариты ГС и КЛА за счет увеличения габаритов рамы и гермоконтейнера.
Целью данного изобретения является повышение точности базирования осей двухстепенных гиростабилизаторов относительно друг друга и осей КЛА и снижение массы и габаритов ГС и КЛА.
Для достижения этой цели оси вращения подвесов ГС размещаются в одной плоскости единого корпуса. Гиродвигатели установлены выше или ниже осей подвеса, для чего рамки подвеса выполняются в виде коленчатого вала так, чтобы они не пересекались в точке пересечения осей подвеса. Балансировка подвижных частей достигается установкой блоков управления ГС на подвижную часть подвеса, диаметрально гиродвигателем, на расстоянии, достаточном для уравновешивания. Более точная балансировка подвижных частей обеспечивается установкой регулировочных прокладок под гиродвигатели и блоки автоматики.
На чертеже изображена кинематическая схема ГС.
Гиродвигатели 1 и 2 крепятся на рамках 3 и 4 подвеса, которые установлены в корпусе 5 на подшипниках 6. Для балансировки подвижных частей подвеса диаметрально гиродвигателям 1 и 2 на рамки 3 и 4 крепятся блоки автоматики 7 и 8 на расстоянии от центра масс до осей подвеса АБА, которое определяется из условия
где mГД и mБА - масса гиродвигателя, с учетом массы неуравновешанной части рамки подвеса, и масса блока автоматики соответственно;
АГД - расстояние от центра масс гиродвигателя, с учетом неуравновешанной части рамки, до осей подвеса.
Остаточный дисбаланс устраняется введением регулировочных прокладок 9 и 10, установленных под гиродвигателями 1 и 2.
Гиростабилизатор работает следующим образом. Управление по осям Х и У осуществляется моментными устройствами, а по оси Z изменением кинетического момента гироскопов регулировкой угловой скорости гиродвигателей 1 и 2.
В связи с выполнением рамок подвесов двухстепенных ГС в виде коленвалов, для того чтобы они не пересекались в точке пересечения осей ГС, и балансировкой подвижных частей блоками автоматики становится возможным выполнение осей Х и У прибора в одной плоскости единого корпуса, что позволит устранить промежуточные базы при ориентации осей ГС относительно друг друга и осей КЛА, при этом снижаются габариты и масса ГС и КЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСТАБИЛИЗАТОР | 1975 |
|
SU1839898A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839918A1 |
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| Гировертикаль | 1989 |
|
SU1789858A1 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| УСТРОЙСТВО ГИРОСКОПИЧЕСКОЙ СТАБИЛИЗАЦИИ ЛИДАРА В ПЛОСКОСТИ ГОРИЗОНТА | 2007 |
|
RU2329468C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1972 |
|
SU355494A1 |
Изобретение относится к приборам систем ориентации, а более точно к силовым гироскопическим стабилизаторам. Сущность: прибор содержит два гироскопа в кардановом подвесе, установленные симметрично относительно центра подвеса. При этом наружные рамы карданова подвеса каждого гироскопа выполнены в виде коленчатых валов, а оси подвеса наружных рам лежат в одной плоскости. Кроме того, на рамах карданова подвеса диаметрально противоположно гироскопам могут быть установлены компенсационные массы, преимущественно в виде блоков автоматики гиростабилизатора. Под гироскопами могут быть установлены регулировочные прокладки. Технический результат: повышение точности базирования осей гиростабилизатора и снижение его габаритов, устранение дисбаланса, повышение точности балансировки. 1 ил.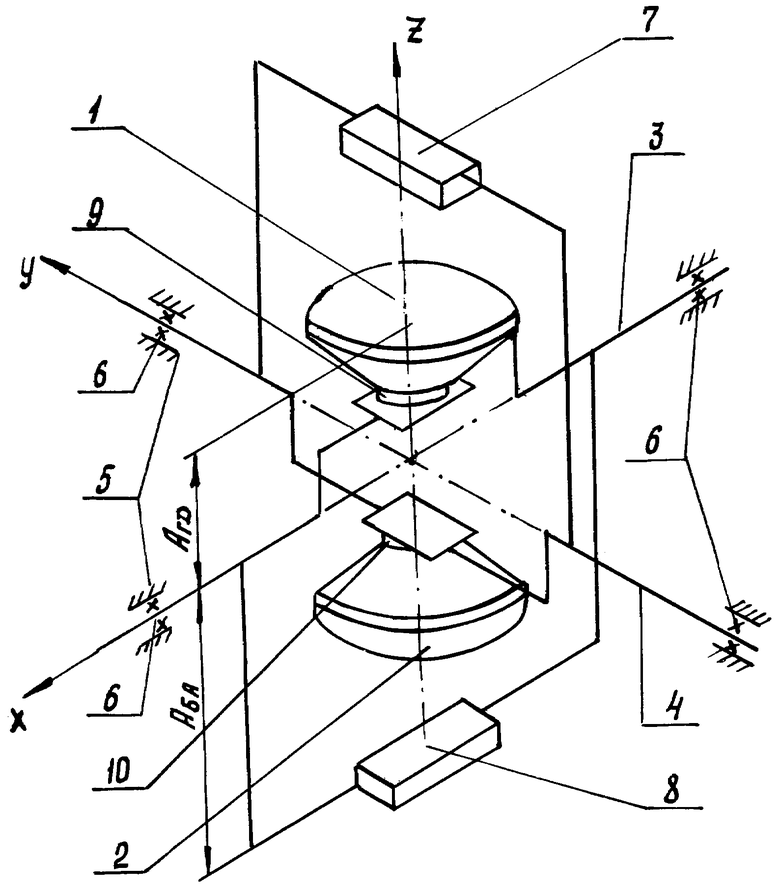
| Данилин В.П | |||
| Гироскопические приборы | |||
| - М.: Высшая школа, 1965 г., с.467-473. |

