Изобретение относится к области оптического приборостроения, в частности к гиростабилизированным устройствам, размещаемым на подвижных объектах для обеспечения стабилизации поля зрения и управления линией визирования оптических приборов в вертикальной плоскости.
Известна система стабилизации линии визирования (далее - ССЛВ) [1], содержащая корпус, платформу с вертикальной осью, размещенную в подшипниках корпуса, зеркальный отражатель с горизонтальной осью, размещенный в подшипниках платформы, одноосный гироскопический стабилизатор с контуром управления, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя, датчик угла, кинематически связанный с осью зеркального отражателя, компенсатор перекрестной связи, вход которого соединен с выходом датчика угла, исполнительный двигатель, установленный на вертикальной оси платформы, первое усилительно -корректирующее устройство, выход которого подключен к исполнительному двигателю, сумматор, первый вход которого соединен с выходом компенсатора перекрестной связи, а выход с входом первого усилительно -корректирующего устройства, гироскопический чувствительный элемент, второе усилительно-корректирующее устройство. В качестве гироскопического чувствительного элемента применен гироскоп с внутренним кардановым подвесом (далее ГВК), жестко связанный с выходной осью одноосного гироскопического стабилизатора, оси чувствительности ГВК расположены соосно с вертикальной осью платформы и с горизонтальной осью зеркального отражателя, первый и второй выходы ГВК соответственно подключены ко второму усилительно-корректирующему устройству и второму входу сумматора, а выход второго усилительно корректирующего устройства подключен к входу контура управления одноосного гироскопического стабилизатора.
Недостатками данного устройства являются ограниченные углы вертикального наведения, не превышающие 45°, что связанно с эффектом «складывания рамок», необходимость устанавливать ГВК и гироскопический стабилизатор на отдельную платформу с кинематической передачей 2:1 между платформой и зеркальным отражателем для обеспечения необходимого соотношения между углом поворота зеркального отражателя и платформы с гироскопическим стабилизатором, что приводит к значительному увеличению габаритов системы.
Задачей настоящего изобретения является увеличение углов вертикального наведения системы стабилизации линии визирования.
Для решения поставленной задачи предложена система стабилизации линии визирования, содержащая корпус, зеркальный отражатель с горизонтальной осью, размещенный в подшипниках в корпусе, датчик углового перемещения, исполнительный двигатель, гироскопический чувствительный элемент, цифровой усилительно-управляющий модуль. Новизна предложения состоит в том, что зеркальный отражатель выполнен в виде зеркально-призменного блока, содержащего призму дневного канала и зеркало тепловизионного канала, гироскопический чувствительный элемент имеет не менее двух осей чувствительности и установлен на корпусе таким образом, что одна его ось чувствительности расположена параллельно горизонтальной оси зеркально-призменного блока, а вторая ось чувствительности - перпендикулярно посадочной плоскости корпуса, при этом его выход подключен к первому входу цифрового усилительно-управляющего модуля, датчик углового перемещения и исполнительный двигатель расположены на оси зеркально-призменного блока, при этом вход исполнительного двигателя подключен к выходу цифрового усилительно-управляющего модуля, а выход датчика углового перемещения подключен ко второму входу цифрового усилительно-управляющего модуля.
В качестве гироскопического чувствительного элемента используется трехосный гиромодуль, выполненный по МЭМС-технологии.
В качестве датчика углового перемещения используется цифровой датчик с не менее чем 21-разрядным цифровым кодом на выходе. В качестве исполнительного двигателя используется синхронный моментный двигатель.
В качестве цифрового усилительно-управляющего модуля используются электрически связанные между собой усилитель мощности и модуль управления гиростабилизированной платформой.
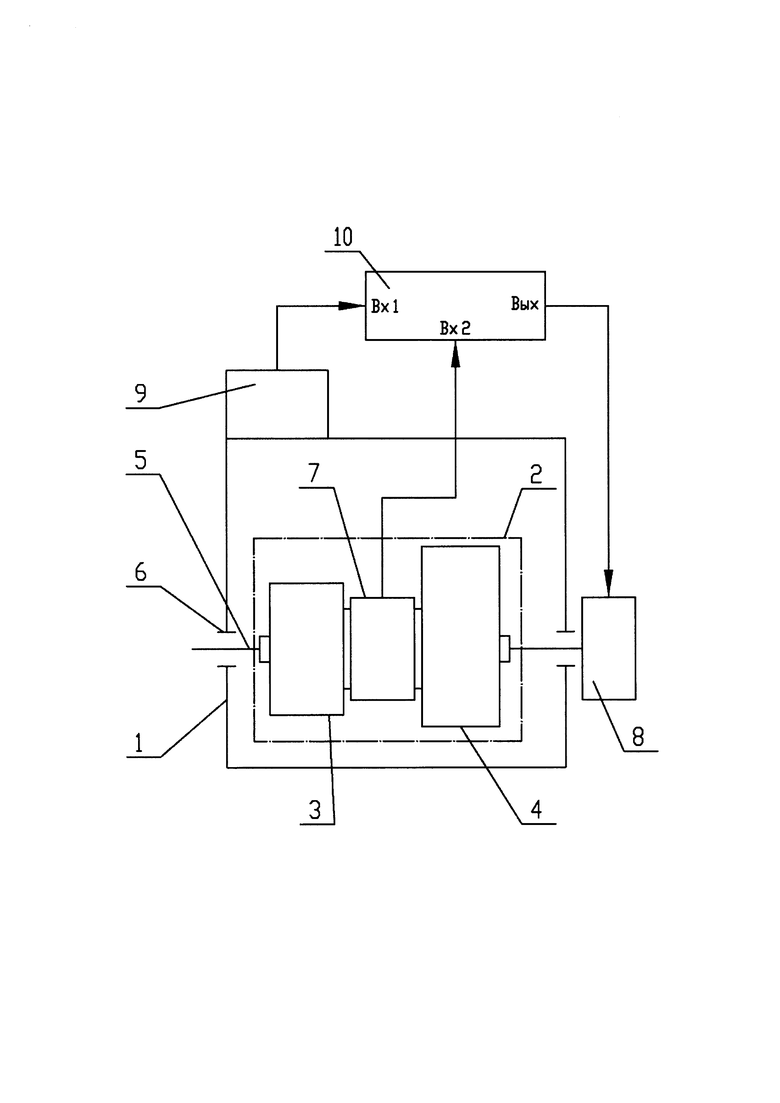
Структурно-кинематическая схема системы стабилизации линии визирования представлена на чертеже.
Система стабилизации линии визирования содержит корпус 1, закрепленный на подвижном объекте, зеркальный отражатель в виде зеркально-призменного блока 2, содержащего призму 3 дневного канала и зеркало 4 тепловизионного канала, с горизонтальной осью 5, размещенной в подшипниках 6 в корпусе 1, датчик углового перемещения 7, исполнительный двигатель 8, установленные на горизонтальной оси 5 зеркально-призменного блока 2, гироскопический чувствительный элемент 9, расположенный на корпусе 1, цифровой усилительно-управляющий модуль 10, первый вход которого электрически связан с гироскопическим чувствительным элементом 9, второй вход связан с датчиком углового перемещения 7, а выход связан с исполнительным двигателем 8.
При движении объекта применения ССЛВ, цифровой усилительно-управляющий модуль 10 на основе входящего сигнала с датчика углового перемещения 7 и сигнала о движении и положении корпуса 1, формируемого гироскопическим чувствительным элементом 9, вырабатывает сигнал управления исполнительным двигателем 8, тем самым обеспечивая стабилизацию линии визирования в вертикальной плоскости, поворачивая зеркально-призменный блок 2 вокруг горизонтальной оси 5.
В качестве гироскопического чувствительного элемента может быть использован трехосный гиромодуль, выполненный по МЭМС-технологии (например, STIM210 компании Sensor Technjlogies). Характеристики STIM210 приближаются по точности к волоконно-оптическим гироскопам. При этом расходы на подключение и использование приборов такого типа ниже, а общая конструкция измерительных систем, где они используются, проще (т.к. не требуется обработка сигналов с датчиков и формирование специальных сигналов питания и запитки). Кроме того, они менее чувствительны к условиям окружающей среды, более компактны и долговечны. Применение данного типа гироскопического чувствительного элемента позволяет повысить прочность, надежность системы, уменьшить массу, снизить потребляемую мощность и стоимость.
Для более точного определения положения зеркально-призменного блока и выявления отклонения его от требуемого, в качестве датчика углового перемещения использован цифровой датчик угла фирмы Renishaw с 21-разрядным цифровым кодом на выходе.
Таким образом, реализация предложенной схемы построения системы стабилизации линии визирования позволяет отказаться от использования ГВК и гироскопического стабилизатора на отдельной платформе с кинематической передачей 2:1 между платформой и зеркальным отражателем, в результате чего увеличить углы наведения по вертикали до 72°, существенно снизить габариты и массу системы, обеспечив при этом заданные характеристики по точности отработки угла.
Источники информации
1. Патент BY №1407 C1, G02B 27/64, G01C 19/02, опуб. 16.12.1996 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЁМ | 2013 |
|
RU2548376C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ ОПТИЧЕСКИХ КАНАЛОВ | 2024 |
|
RU2831620C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1996 |
|
RU2104578C1 |
| Система управления огнем боевой машины | 2019 |
|
RU2747229C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2004 |
|
RU2260773C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ НАПРАВЛЕНИЯ ЗЕРКАЛА АНТЕННОГО УСТРОЙСТВА НА ОБЪЕКТ ВИЗИРОВАНИЯ С ОДНОВРЕМЕННЫМ ФОРМИРОВАНИЕМ СИГНАЛОВ ТОРМОЖЕНИЯ ВРАЩЕНИЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ ПРИ КРУГОВОМ ВРАЩЕНИИ ОСНОВАНИЯ АНТЕННОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО ЖЕСТКО ВНУТРИ КОРПУСА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2336611C1 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
Изобретение относится к области оптического приборостроения, в частности к гиростабилизированным устройствам, размещаемым на подвижных объектах для обеспечения стабилизации поля зрения и управления линией визирования оптических приборов в вертикальной плоскости. Технический результат заключается в увеличении углов вертикального наведения системы стабилизации линии визирования. В заявленной системе стабилизации линии визирования зеркальный отражатель выполнен в виде зеркально-призменного блока, содержащего призму дневного канала и зеркало тепловизионного канала, гироскопический чувствительный элемент имеет не менее двух осей чувствительности и установлен на корпусе таким образом, что одна его ось чувствительности расположена параллельно горизонтальной оси зеркально-призменного блока, а вторая ось чувствительности - перпендикулярно посадочной плоскости корпуса, при этом его выход подключен к первому входу цифрового усилительно-управляющего модуля, датчик углового перемещения и исполнительный двигатель расположены на оси зеркально-призменного блока, при этом вход исполнительного двигателя подключен к выходу цифрового усилительно-управляющего модуля, а выход датчика углового перемещения подключен ко второму входу цифрового усилительно-управляющего модуля. 2 з.п. ф-лы, 1 ил.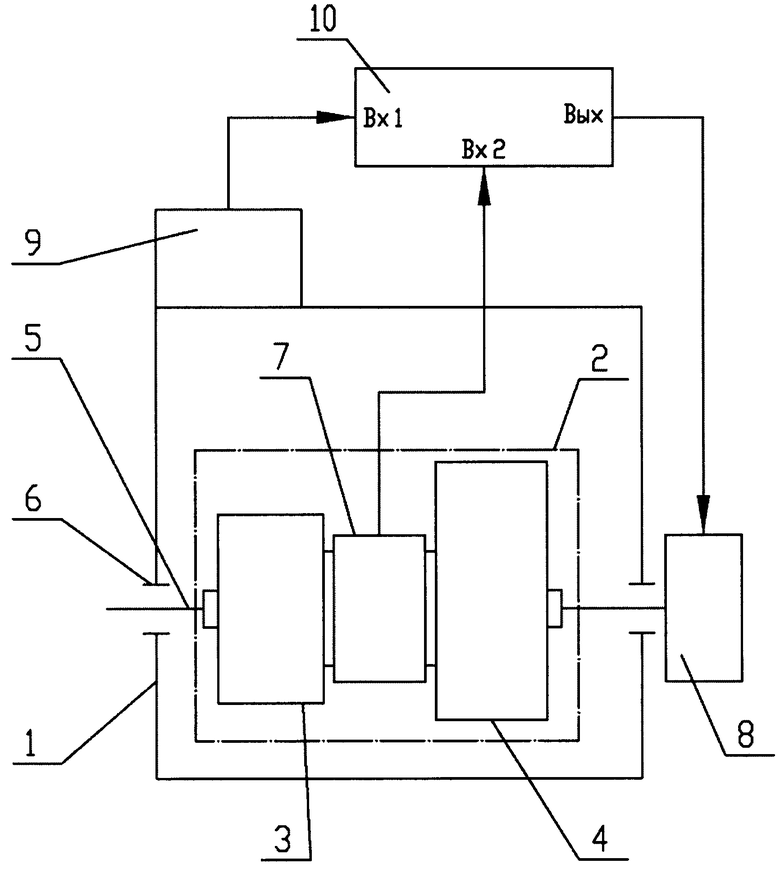
1. Система стабилизации линии визирования, содержащая корпус, зеркальный отражатель с горизонтальной осью, размещенный в подшипниках в корпусе, датчик углового перемещения, исполнительный двигатель, гироскопический чувствительный элемент, цифровой усилительно-управляющий модуль, отличающаяся тем, что зеркальный отражатель выполнен в виде зеркально-призменного блока, содержащего призму дневного канала и зеркало тепловизионного канала, гироскопический чувствительный элемент имеет не менее двух осей чувствительности и установлен на корпусе таким образом, что одна его ось чувствительности расположена параллельно горизонтальной оси зеркально-призменного блока, а вторая ось чувствительности - перпендикулярно посадочной плоскости корпуса, при этом его выход подключен к первому входу цифрового усилительно-управляющего модуля, датчик углового перемещения и исполнительный двигатель расположены на оси зеркально-призменного блока, при этом вход исполнительного двигателя подключен к выходу цифрового усилительно-управляющего модуля, а выход датчика углового перемещения подключен ко второму входу цифрового усилительно-управляющего модуля.
2. Система по п. 1, отличающаяся тем, что в качестве гироскопического чувствительного элемента используется трехосный гиромодуль, выполненный по МЭМС-технологии.
3. Система по п. 1, отличающаяся тем, что в качестве датчика углового перемещения используется цифровой датчик с не менее чем 21-разрядным цифровым кодом на выходе.
| Импульсный индикатор для пожарной сигнализации | 1930 |
|
SU29390A1 |
| RU 193284 U1, 22.10.2019 | |||
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| US 5203220 A, 20.04.1993. | |||

