Изобретение относится к гироскопическим приборам и может найти применение при определении положения искусственного горизонта или вертикали и измерении углов крена и тангажа объекта, например летательного аппарата (ЛА).
Известна гировертикаль, содержащая карданов подвес с корректором и ротор гиродвигателя с устройством создания нижней маятниковое™ при невращающемся роторе, причем это устройство содержит подвижные элементы, расположенные в цилиндрических замкнутых полостях, выполненных наклонно сверху вниз непосредственно в роторе. Подвижные элементы преимущественно выполнены в виде шаров.
При отсутствии электропитания шарообразные массы, находящиеся в крайнем нижнем положении, создавая нижнюю ма- ятниковость, удерживают ось ротора гироскопа в положении, близком к
вертикальному. При подаче электропитания ротор начинает вращаться, под действием составляющих центробежных сил подвижные шарообразные массы перемещаются в крайние верхние положения, в результате чего гироскоп переходит из состояния со смещенным центром масс в уравновешенное состояние, т.е. в астатическое состояние.
Недостатком известной гировертикали являются сложность конструкции и невысокая точность. Как известно, точность гироскопического прибора в большой степени зависит от величины кинетического момента Н ротора гироскопа, так как дрейф (уход) гироскопа под действием вредных моментов Мв определяется выражением
Мв
исхода - -jyp
Практически кинетический момент Н является основным определяющим параметvl00 Ю 00 СП 00
ром гироскопических приборов, в том числе и гировертикали (авиагоризонта),
Наличие втёле ротора гироскопа цилиндрических полостей ведет к уменьшению кинетического момента ротора.
У современной гировертикали (авиагоризонта) моменты трения по осям кардано- ва подвеса, т.е. по оси внутренней и наружной р$мо.к, достигают величины 3 г.см - трение; в шарикоподшипниках, токо- подводах и датчиках угла (например, в по- TeHLjndMetp ax): K-powe того, в авиагорШонта : и гироверти калях широко применяется шариковый корректор. При отключении питания и остановке ротора гироскопа шарик стремится скатиться к краю корректора и отклоняет рамки карданова подвеса от их рабочего нулевого положения на углы более 90°. Поэтому, чтобы после отключения питания и остановки ротора гироскопа его ось удерживалась в положении, близком к вертикальному, требуется создавать момент маятниковости ММ1 «70 г-см. Чтобы получить такую маятниковость в известной гировертикали, ротор гироскопа снабжен 14 цилиндрическими полостями и 14 шарами диаметром 8,5 мм. Наличие 14 полостей примерно на 25% уменьшает кинетический момент гироскопа, а следовательно, на 25% снижает точность гировертикали.
Чтобы сохранить необходимую точность гировертикали, приходится увеличивать Н, в частности, за счет увеличения наружного диаметра ротора гироскопа, т.е. за счет существенного увеличения габарит- - ных размеров ротора и гировертикали в целом.
Теоретически возможно увеличение Н за счет наращивания массы ротора в нижней его части (под диаграммой), т.е. с полусферой внизу. Однако практически так не поступают по следующим соображениям:
- реально ротор гироскопа выполняют в виде цилиндра без полусферы внизу, так как придание диафрагме полусферической формы делает конструкцию нетехнологичной вследствие сложности при изготовлении полусферы в серийном производстве;
- за счет введения полусферы под диафрагмой значительно увеличивается масса ротора и несущественно увеличивается кинетический момент Н. Это объясняется тем, что Н JQ, где J - момент инерции ротора; Q- скорость вращения ротора. Причем J mR2, где m - масса участков рото- . pa; R - радиус вращения участка ротора относительно оси вращения ротора. Как видно из формулы, в формировании момента инерции большую роль играет не масса т. а радиус R (в формуле он в квадрате). У полусферы участки с большой массой имеют малый радиус R, а участки с большим R име5 ют незначительную массу. Поэтому увеличение Н за счет выполнения диафрагмы в виде полусферы неэффективно. Общепринято увеличение Н за счет увеличения наружного диаметра ротора.
10 Недостатком известной гировертикали является значительная сложность, так как в ее роторе выполнено с достаточно высокой точностью и хорошей чистотой 14 наклонных отверстий. Большой угол наклона зада15 вать невозможно, так как это ведет к увеличению толщины стенки ротора, а следовательно, и к увеличению габаритов ротора, что вызывает увеличение габаритов гировертикали. Из-за малости угла наклона
0 невелика и подъемная сила шаров (угол наклона равен нулю - подъемная сила также равна нулю). Поэтому, чтобы шары не застревали в цилиндрических полостях, поверхности полостей приходится шлифовать,
25 что приводит к усложнению технологического процесса.
Наиболее близким к изобретению по технической сущности и достигаемому результату является гироскопический датчик
30 (гировертикаль) авиагоризонта, содержащий ротор гиродвигателя, установленный на шарикоподшипниках в кардановом подвесе и содержащий устройство создания нижней маятниковости, выполненное в ви35 де по крайней мере двух Г-образных рычагов, каждый из которых закреплен в роторе на своей оси с возможностью поворота в плоскости, проходящей через ось вращения ротора, при этом горизонтальный конец
40 плеча каждого Г-образного рычага направлен к центру ротора и кинематически связан с наружным кольцом дополнительно введенного радиально-упорного шарикоподшипника, жестко закрепленного на валу
45 ротора, причем в качестве опор ротора использованы шарикоподшипники с наружным или внутренним кольцом типа гладкой втулки.
Недостатками гиродатчика авиагори50 зонта являются:
Значительная конструктивная сложность, повышающая его себестоимость, так как в него вводится дополнительный шарикоподшипник, а в теле ротора необходимо
55 выполнять полости для размещения Г-образных рычагов. Полости имеют сложную форму, поэтому их можно изготовить только в случае применения конструкции ротора, состоящей из двух частей, а это ведет к
усложнению ротора, технологии его изготовления и сборки.
Большие габариты гиродвигателя, а следовательно, и гироприбора, так как для размещения в теле ротора Г-образных ры- чагов, способных поднять ротор гиродвигателя, толщина стенок ротора должна быть большой.
Невысокая точность гировертикали, так как для того, чтобы уменьшить габаритные размеры ротора гиродвигателя и особенно чтобы уменьшить наружный диаметр обода ротора, его изготавливают из стали, латуни или тяжелого сплава. Но при большой толщине стенок ротора, которая необходима для размещения Г-образных рычагов, масса ротора, изготовленного из стали, становится чрезмерно и недопустимо большой. Поэтому ротор известной гировертикали придется делать из легкого сплава. Только в этом случае Г-образные рычаги смогут поднять ротор. Но в этом случае величина кинетического момента Н, а следовательно, и точность гировертикали, будут небольшими. Недостаточная надежность гиродвига- теля и гироприбора в целом, так как в качестве главных опор ротора используются шарикоподшипники с гладкими втулками. В гиродвигателях в качестве главных опор преимущественно используются ради- ально-упорные шарикоподшипники. Как показал опыт эксплуатации авиагоризонта АГБ-ЗК, у которого шарикоподшипники с гладкими втулками установлены на осях карданова подвеса (здесь нагрузки значи- тельно меньше, чем в роторе гиродвигателя), на поверхности гладких втулок образуются лунки и вмятины от шаров, что ведет к увеличению момента трения шарикоподшипников, их перегреву и отказу.
Целью изобретения является повышение точности при упрощении конструкции.
Указанная цель обеспечивается тем, что в гировертикали, содержащей ротор, установленный на шарикоподшипниках в карда- новом подвесе, и устройство для создания нижней маятниковости при невращающемся роторе, включающее по крайней мере два подвижных элемента, шарнирно связанных с ротором с возможностью поворота в плоскости, проходящей через ось вращения ротора, согласно изобретению подвижные элементы выполнены в виде пластин с инерционными массами (грузами) и установлены на нижней поверхности ротора, на которой под пластины выполнены пазы с выемками для инерционных масс.
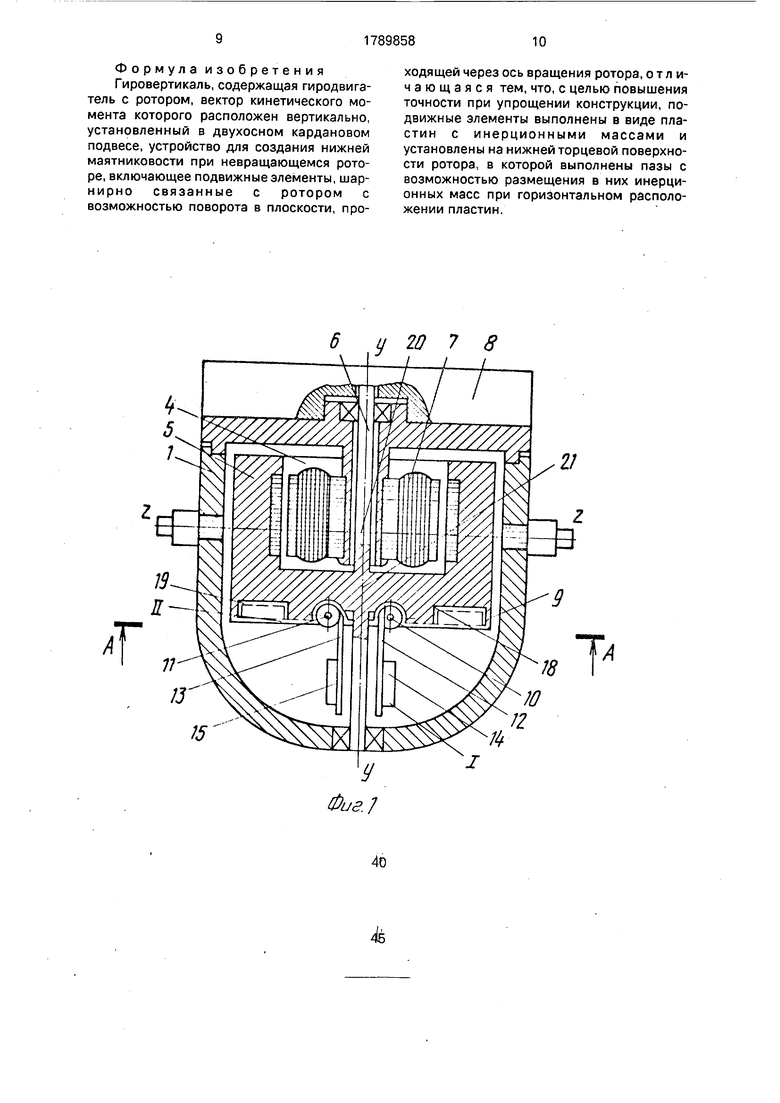
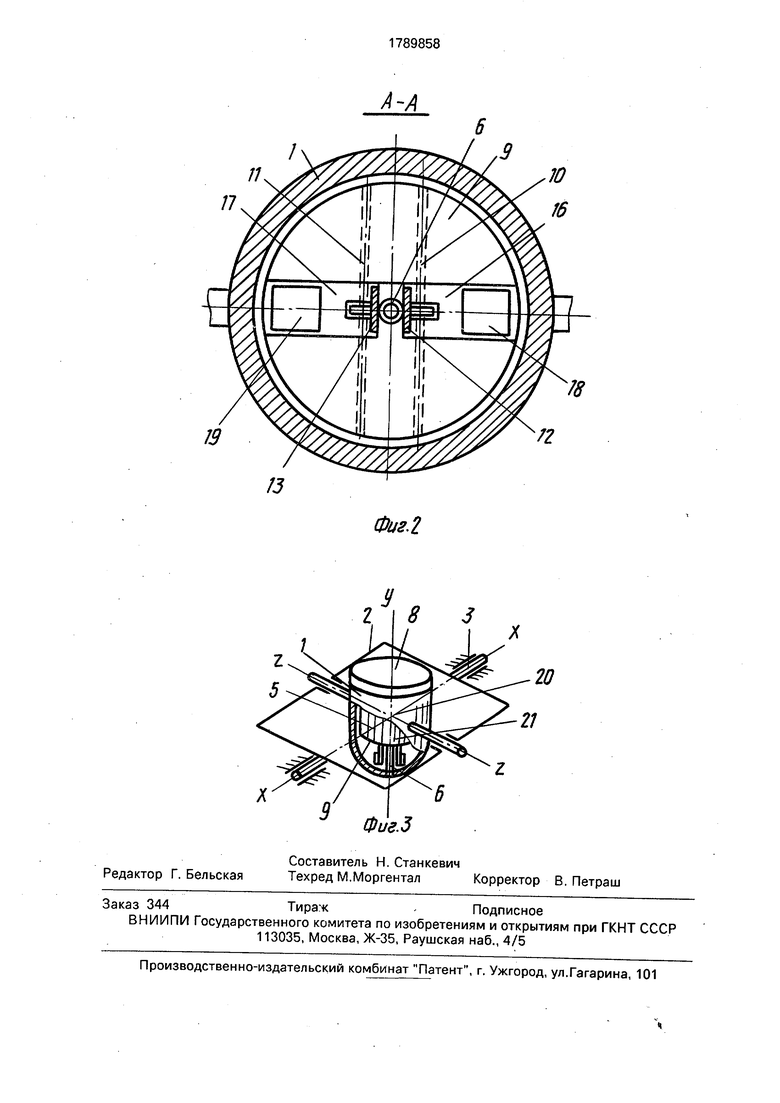
На фиг. 1 изображена внутренняя рамка карданова подвеса гировертикали, частичный разрез; на фиг, 2 - разрез А-А на
фиг. 1; на фиг. 3 - кинематическая схема гировертикали в обесточенном состоянии.
Гировертикаль содержит внутреннюю 1 и внешнюю 3 рамки карданова подвеса (фиг. 1, 3), корпус 3, гиродвигатель 4, состоящий из ротора 5 с осью 6 и статора 7, а также корректор 8, установленный на внутренней рамке 1 (фиг.1). На нижней торцовой поверхности 5 с помощью осей 10 и 11 шарнирно установлены пластины 12, 13 с грузами (инерционными массами) 14,15, а.также вы- фрезерованы пазы 16, 17 и вйемки 18, 19 под грузы 14,15. На фиг. 1,3 показаны также основной 20 и смещенный 21 центры масс,
Масса грузов 14, 15 устанавливается экспериментально или определяется расчетным путем в зависимости от конструкции корректора 8. Выше указывалось на то, что в случае использования в гировертикали шарикового корректора требуется создавать момент маятниковости MMI 70 г-см.
Для создания такой маятниковости в предложенном устройстве достаточно четырех грузов 14, 15 с размерами 0,8 х 1 х х1,2 см (объем одного груза 0,96 см3, масса
Р V/o, Для сталир 7,8 . Масса одного
см
груза Р 0,96-7,8 7,5 г, Масса четырех грузов Z Р 30 г. При расстоянии от центра груза до оси поворота пластины L 2,3 см момент маятниковости Мм 30 -2,3 70 г-см),
Обычно рамка 2 охватывает гиродвигатель 4, повторяя его форму. На верхней торцовой площадке рамки 1 закрепляют корректор (например, шариковый корректор 8), на нижней площадке могут быть закреплены балансировочные грузы. Наиболее оптимальной формой ротора (с точки зрения получения оптимального кинетического момента, наименьших габаритов и с точки зрения наилучшей технологичности при изготовлении) является цилиндр. Увеличение массы ротора за счет выполнения его нижней части в виде полусферы, размещенной в полусферической зоне рамки 1 (фиг.1) малоэффективно. В результате пространство под нижней торцовой поверхностью ротора 5 оказывается свободным. В предложенном техническом решении это пространство используется для размещения пластин 12, 13с грузами 14, 15 (фиг. 1,3).
Гировертикаль работает следующим образом.
При отключенном питании ротор 5 гиродвигателя 4 не вращается, пластины 12, 13 с грузами 14, 15 опущены вниз и располагаются вертикально (или почти вертикально) вдоль оси 6.
В результате у рамок 1 и 2 карданова подвеса образуется нижняя маятниковость, под действием которой ось 6 гиродвигателя 4 устанавливается в положение, близкое к вертикальному. Это обстоятельство способствует при включении питания быстрому приведению оси 6 гиродвигателя 4 корректором 8 в вертикальное положение т.е. уменьшению времени готовности гировертикали
При включении питания гировертикали ротор 5 гиродвигателя 4 начинает вращаться, набирая обороты. Под действием центробежных сил пластины 12,13 с грузами 14, 15 поворачиваются на осях 10,11 до тех пор, пока не займут горизонтальное положение II (фиг. 1). При этом пластины 12, 13 заходят в пазы 16, 17, выфрезерованные на нижней поверхности 9 ротора 5, а грузы 14, 15 - в выемки 18, 19. Центр масс гироскопа устанавливается в точке 20 (фиг. 1, 3) на пересе- чение осей X-Х, Y-Y, Z-Z. Гироскоп превращается в астатический, т.е. в полностью уравновешенный, не имеющий маят- никовостей. Такой гироскоп не чувствителен к действию линейных ускорений. Если ось 6 перед запуском гировертикали.не совпадала с вертикалью, корректор 6 устранит это несовмещение.
После отключения питания обороты ротора 5 постепенно уменьшаются, вследствие чего уменьшаются и центробежные силы, воздействующие на грузы 14, 15, при этом постепенно пластины с грузами опускаются вниз и располагаются вертикально (положение I на фиг. 2). В результате пластины 12, 13 с грузами 14,15 создают гироскопу нижнюю маятниковость. Центр масс гироскопа смещается в точку 21 (фиг. 1), благодаря чему ось 6 ротора 5 гиродвигателя 4 устанавливается в положение, близкое к вертикальному. Гировертикаль готова к очередному запуску.
Поскольку вес грузов 14, 15 достаточно велик (Р 7,5 г-см и выше), прецизионная шарнирная подвеска пластины 12, 13 с грузами 14, 15 не требуется, так как при разгоне ротора 5 и достижении им такой большой угловой скорости, как Q 20000 об/ мин, на грузы будут действовать достаточные усилия, чтобы перевести их в горизонтальное положение и чтобы грузы зашли в выемки нижней торцовой поверхности ротора 5.
При отключении питания гировертикали с последующим уменьшением оборотов ротора и его полной остановкой груза 14,15
опустятся вниз, пластины 12,13 займут примерно вертикальное положение. Но если даже пластины 12, 13 из-за грубости шарнирных подвесов и не дойдут до вертикального положения на 1-2°, особыми неприятностями это не грозит, так как момент нижней маятниковости Мм «70 г все равно будет создан. Кроме того, задача состоит не в том, чтобы перед запуском гировертикали
установить ось ротора гироскопа строго по вертикали, а в том, чтобы установить ось ротора в положение, близкое к вертикальному.
Пластины 12, 13 и грузы 14, 15 преимущественно изготавливаются из того же материала, что и ротор 5. Грузы могут выполняться в виде параллелепипедов, в виде усеченных пирамид, им может быть придана полусферическая форма. Пластины
12,13 в горизонтальном положении заходят в пазы 16, 17 заподлицо с нижней торцовой поверхностью 9 ротора 5. Благодаря этому кинетический момент гироскопа и аэродинамические характеристики ротора остаются практически такими же, как в случае изготовления ротора без пазов 16, 17 и без выемок 18, 19 под грузы 14, 15.
Пластин с грузами должно быть по крайней мере две, располагаться они должны
симметрично относительно оси 6 ротора 5. В этом случае создаются оптимальные условия для балансировки ротора 5 и рамок 1, 2 карданова подвеса.
Таким образом, упрощение конструкции гировертикали достигается за счет того, что подвижные элементы, создающие гироскопу нижнюю маятниковость, размещаются не во внутренних частях ротора, а на наружной его поверхности, причем подвижные элементы имеют простую форму и состоят .из пластин и грузов. Следует также отметить, что в предложенном техническом решении традиционный принцип построения гиродвигателя гировертикали (хорошо
отработанный, а потому и надежный) сохраняется: применение двух радиально-упор- ных шарикоподшипников, использования температурной компенсации в главных опорах гиродвигателя и т.д.
Повышение точности гировертикали достигается благодаря тому, что в теле ротора, по сравнению с известными гировертикалями, отсутствуют полости, не заполненные
металлом. Вследствие этого кинетический момент гироскопа предложенной гировертикали на 25% больше, чем у известных гировертикалей, соответственно на 25% выше и точность.
Ф о р м у л а и з о б р е т е н и я Гировертикаль, содержащая гиродвига- тель с ротором, вектор кинетического момента которого расположен вертикально, установленный в двухосном кардановом подвесе, устройство для создания нижней маятниковости при невращающемся роторе, включающее подвижные элементы, шар- нирно связанные с ротором с возможностью поворота в плоскости, проходящей через ось вращения ротора, отличающаяся тем, что, с целью повышения точности при упрощении конструкции, подвижные элементы выполнены в виде пластин с инерционными массами и установлены на нижней торцевой поверхности ротора, в которой выполнены пазы с возможностью размещения в них инерционных масс при горизонтальном расположении пластин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| Тренажер для изучения авиагоризонта | 2017 |
|
RU2658554C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК КРЕНА | 2003 |
|
RU2264597C2 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| ИМПУЛЬСНЫЙ ТРЕХСТЕПЕННЫЙ ГИРОСКОПИЧЕСКИЙ ПРИБОР, СПОСОБ ЕГО ЗАПУСКА И СПОСОБ ВЗВЕДЕНИЯ СПИРАЛЬНЫХ ЛЕНТОЧНЫХ ПРУЖИН ИМПУЛЬСНОГО ТРЕХСТЕПЕННОГО ГИРОСКОПА | 2001 |
|
RU2196963C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
Изобретение относится к гироскопическим приборам. Целью изобретения является повышение точности при упрощении конструкции. Гировертикаль содержит внутреннюю 1 и внешнюю рамки карданова подвеса, корпус, гиродвигатель4, состоящий из ротора 5 с осью 6 и статора 7, а также корректор 8, установленный на внутренней рамке 1. На нижней торцовой поверхности ротора 5 с помощью осей 10 и 11 шарнирнс установлены пластины 12, 13 с грузами (инерционными массами) 14,15, а также вы фрезерованы пазы под пластины 12, 13 выемки 18, 19 под грузы 14, 15. При невращающемся роторе 5 гиродвигателя 4 пластины 12, 13 с грузами 14, 15 опущены и расположены вертикально вдоль оси 6. При вращающемся роторе 5 гиродвигателя 4 под действием центробежных сил пластины 12, 13 с грузами 14, 16 поворачиваются на осях 10, 11 до тех пор, пока не займут горизонтальное положение. При этом пластины 12, 13 заходят в пазы выфрезерованные на нижней поверхности 9 ротора 5, а грузы 14, 15 - в выемки 18. 19. 3 ил. Ё
6 у 20 7 8
Фиг.2
| СПОСОБ ОЧИСТКИ 1,2-ДИХЛОРЭТАНА ОТ НИЗКОКИПЯЩИХ ПРИМЕСЕЙ | 1970 |
|
SU415863A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
