Настоящее изобретение было подготовлено с правительственной поддержкой согласно гранту № N01-A0-60001, выданному Национальным институтом здравоохранения (NIH). Правительство обладает определенными правами на это изобретение.
Следующие материалы относятся к медицинским приемам создания изображений и изолирования от окружающей среды и описаны со ссылкой на пример медицинских систем формирования изображений, предназначенных для создания изображений объектов, требующих размещения в среде, обладающей четвертым уровнем биологической безопасности (BSL-4). Следующие материалы находят более широкое применение при медицинском формировании изображений или иной диагностике, выполняемой в сочетании с изолирующей средой для изучения, обработки или иного обращения или вмещающей объекты, которые подвергаются или могут подвергаться воздействию радиации, токсичных веществ, биологического заражения или иных вредных веществ. Далее, они находят применение в медицинском формировании изображений в сочетании с выполнением медицинского формирования изображений или иной диагностике в изолирующих помещениях, таких, например, как чистые помещения, стерильные помещения, среда инертного газа и так далее, которые контролируются с целью ограничить загрязнение со стороны условий обычной окружающей среды.
Биологически вредные и в высшей степени инфекционные заболевания вызывают все большую озабоченность со стороны органов здравоохранения. Расширение воздушных пассажирских перевозок способствует быстрому распространению инфекционных заболеваний по всему миру. Биотерроризм является другим потенциальным путем распространения в обществе опасных инфекционных заболеваний. Эффективную реакцию на появление инфекции облегчает знание возбудителя инфекции (то есть типов или разновидностей вирусов, бактерий, прионов, спор и так далее), действия лечебных средств (таких как лекарства или другие виды лечения), путей передачи (таких как передача по воздуху, контактная передача и так далее), инкубационного периода до появления симптомов и так далее. Эти знания получаются в ходе соответствующих лабораторных исследований.
Медицинские системы формирования изображений, такие как магнитно-резонансные сканеры (MR), трансмиссионные компьютерные (СТ) томографы, эмиссионные (PET) томографы, гамма-камеры для однофотонной эмиссионной компьютерной томографии (SPECT) и так далее, являются мощным средством обнаружения физиологических проявлений заболеваний, вызванных опасными инфекциями, воздействием радиоактивности или токсических веществ и так далее. Например, такие технические средства формирования изображений могут обнаружить злокачественные опухоли или другие аномалии, которые могут служить признаком инфекции или заболевания. Техника медицинского формирования изображений может применяться периодически (например, ежечасно, ежедневно, еженедельно или на иной основе) для получения изображений живых человеческих или животных объектов с целью прослеживания физиологической реакции на заболевание или воздействие радиации или токсичного средства. Такие технические средства, как многоядерная спектроскопия, могут прослеживать метаболические изменения, связанные с развитием болезни. Эти диагностические приемы, основанные на медицинском формировании изображений, являются просто иллюстративными примерами.
Хотя преимущества медицинских систем формирования изображений хорошо известны, применение медицинских систем формирования изображений в условиях изолированной среды сталкивалось до сих пор с серьезными трудностями. Национальный институт здравоохранения (NIH) и Центр контроля за заболеваемостью (CDC) опубликовали рабочие условия для лабораторий, производящих биологические исследования в отношении вредных инфекционных заболеваний. Установлены четыре уровня изоляции: первый уровень биологической безопасности (BSL-1), BSL-2, BSL-3 и BSL-4, при уровне изоляции, возрастающем при повышении уровня биологической безопасности. Уровень BSL-3 требует таких мер по изоляции, как физическое отделение рабочей области лаборатории от коридоров для доступа в нее и контроль воздушного потока. BSL-4 требует изолированную зону (которую иногда называют «горячей зоной») со специально предназначенным воздушным потоком. Изолированной зоной является комната, часть комнаты или здание, которое герметически закрыто для того, чтобы не допустить выноса инфекции по воздуху, а лабораторный персонал работает в горячей зоне в герметичных костюмах, таких как костюмы из опасного материала (HAZMAT), с автономными дыхательными устройствами. Лабораторный персонал и любые предметы, которые покидают изолированную зону, должны проходить через воздушный тамбур и подвергаться специальным процедурам обеззараживания перед тем, как быть выпущенными наружу из среды BSL-4. Изолирующая среда должна быть спроектирована таким образом, чтобы свести к минимуму или исключить наличие острых углов или деталей и свести к минимуму или исключить мелкие операторные детали, такие как мелкие крепления, кнопки управления и тому подобное, которыми трудно управлять при пользовании изолирующими перчатками костюма.
Среда BSL-4 служит примером. Другие изолирующие среды используют, например, для создания стерильной среды для разработки и испытания лекарств, для обеспечения изоляции токсичных или радиоактивных материалов и так далее. Эти изолирующие среды накладывают определенные ограничения, такие как ограниченное перемещение персонала и оборудования, наложение ограничений на гибкость работы вручную для одетого в перчатки или иным образом персонала, ограничение наличия острых углов или деталей или тому подобное.
Размещение в изолированной среде сложного и чувствительного медицинского оборудования для формирования изображений, такого как MR сканер, СТ сканер и тому подобное, является проблематичным. Медицинское оборудование для создания изображений обычно включает в себя сотни, тысячи и больше компонентов, некоторые из них трудно доступны для выполнения обеззараживания, а некоторые могут быть выполнены из материалов, которые не совместимы с процедурами обеззараживания, применяемыми в изолированной зоне. Например, коррозионные химические вещества или нагрев, которые могут использоваться при обеззараживании в BSL-4, могут вызвать повреждение чувствительных компонентов медицинского прибора для формирования изображения.
Загрязнение является также проблемой для предметного столика, который применяется для размещения объекта в канале или ином объеме формирования изображения медицинского прибора для формирования изображений. Поскольку на предметном столике размещают зараженный или потенциально зараженный объект, предметный столик часто обеззараживают. Например, в среде BSL-4 такое обеззараживание должно обычно включать в себя протирку обеззараживающими химикатами столика после размещения на нем объекта и, иногда, более обширные операции обеззараживания. Предметный столик должен также обладать устойчивой, ровной поверхностью при установке в медицинском приборе для формирования изображений, что налагает механические ограничения на конструкцию столика.
Другое соображение заключается в том, что с предметным столиком каждый раз при установке или выемке нового объекта из медицинского прибора для формирования изображений обращается или манипулирует персонал, работающий в изолированной среде. Таким персоналом могут оказаться не радиологи, подготовленные к работе на медицинских приборах для формирования изображений, и персонал может оказаться не обученным выполнению обычных задач по обслуживанию столика. Кроме того, персонал в изолированной среде обычно обладает уменьшенной подвижностью из-за того, что носит перчатки, костюмы HAZMAT и так далее. Контакт между предметным столиком и персоналом в изолированной зоне может быть уменьшен или даже исключен не только за счет автоматизации операций, таких как перемещение столика в канал или объем формирования изображения медицинского прибора для формирования изображений или из него, но и за счет внесения дополнительных механических деталей, которые ведут к усложнению обеззараживания и могут привести к более частым механическим отказам.
Согласно одному аспекту предлагается система загрузки объекта, предназначенная для перемещения объекта, расположенного в изолированной зоне, в систему диагностики, расположенную вне изолированной зоны, или из нее. От изолированной зоны отходит тоннель. Тоннель имеет внутренний объем, открытый в изолированную зону и оперативно соединенный с системой диагностики. В изолированной зоне располагается удлиненная платформа для размещения объекта, размеры которой позволяют помещать ее в тоннель. В изолированной зоне располагается основа, включающая в себя механический привод, приспособленная для совмещения удлиненной платформы для размещения объекта с тоннелем и для ввода и вывода удлиненной платформы для размещения объекта из тоннеля.
Согласно другому аспекту предлагается предметный столик для объекта (предметный столик), который включает в себя: платформу для размещения объекта; переднюю опорную стойку, прикрепленную к полу или платформе и подвижно взаимодействующую с платформой для размещения объекта; заднюю опорную стойку, прикрепленную к платформе для размещения объекта и подвижно взаимодействующую с полом или платформой; и моторизованный привод, расположенный на или внутри пола или платформы и взаимодействующий с задней опорной стойкой с целью перемещения задней опорной стойки относительно передней опорной стойки таким образом, чтобы переместить платформу для размещения объекта через переднюю опорную стойку.
Согласно другому аспекту предлагается предметный столик, предназначенный для ввода и вывода объекта из магнитно-резонансного (MR) сканера. Предметный столик включает в себя: основу; верхнюю поверхность столика, по меньшей мере, частично расположенную на основе; и модульный мотор, расположенный на основе или внутри ее и предназначенный для перемещения верхней поверхности столика по основе. Основа и модульный мотор скомпонованы таким образом, что модульный мотор снимается только путем перемещения модульного мотора в общем направлении от сканера MR.
Согласно другому аспекту предлагается предметный столик, предназначенный для использования в изолированной зоне. Удлиненная платформа для размещения объекта и основа располагаются в изолированной зоне. Основа скомпонована для поддержки удлиненной платформы для размещения объекта. Моторизованный привод установлен вместе с основой и приспособлен для перемещения удлиненной платформы для размещения объекта с целью продвижения конца платформы для размещения объекта в направлении соответствующего объекта. Моторизованный привод включает в себя модульный мотор, который приспособлен для установки в качестве агрегата с возможностью отделения в основе.
Одно преимущество заключается в предложении предметных столиков, которыми может легко пользоваться персонал в изолирующих костюмах или с иными причинами ограничения подвижности.
Другое преимущество заключается в предложении предметных столиков, подлежащих обеззараживанию с помощью коррозионных химических веществ.
Другое преимущество заключается в предложении предметных столиков с модульными моторами, в которых смазанные или чувствительные в другом отношении компоненты мотора герметично изолированы.
Другое преимущество заключается в пространственном разделении моторизованных приводов для промежуточной и верхней палеток таким образом, чтобы обеспечить доступность компонентов привода в целях обеззараживания и ремонта.
Другое преимущество заключается в размещении модульного мотора привода для столика сканера MR таким образом, чтобы мотор мог сниматься только путем вывода модульного мотора в общем из магнита сканера MR.
Специалистам в данной области техники должны быть понятны и другие преимущества настоящего изобретения после того, как они прочтут и осмыслят следующее подробное описание.
Изобретение может принять форму различных компонентов и компоновок компонентов и различных операций и сочетаний операций. Чертежи предназначены только для иллюстрации предпочтительных вариантов реализации и не должны рассматриваться как ограничивающие изобретение.
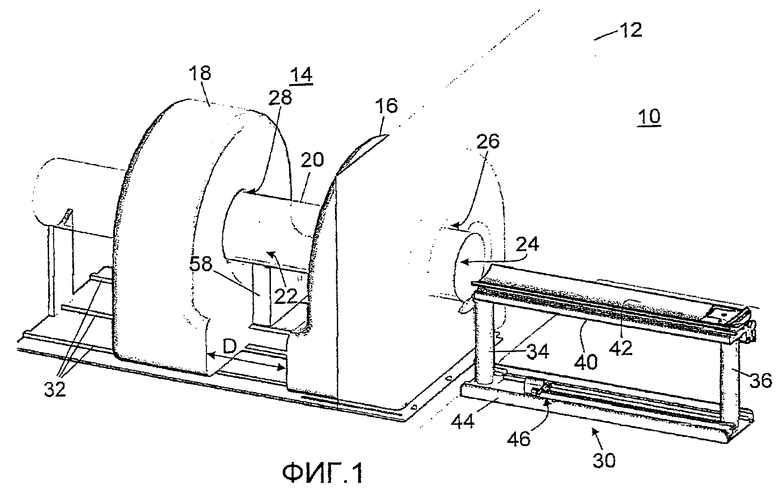
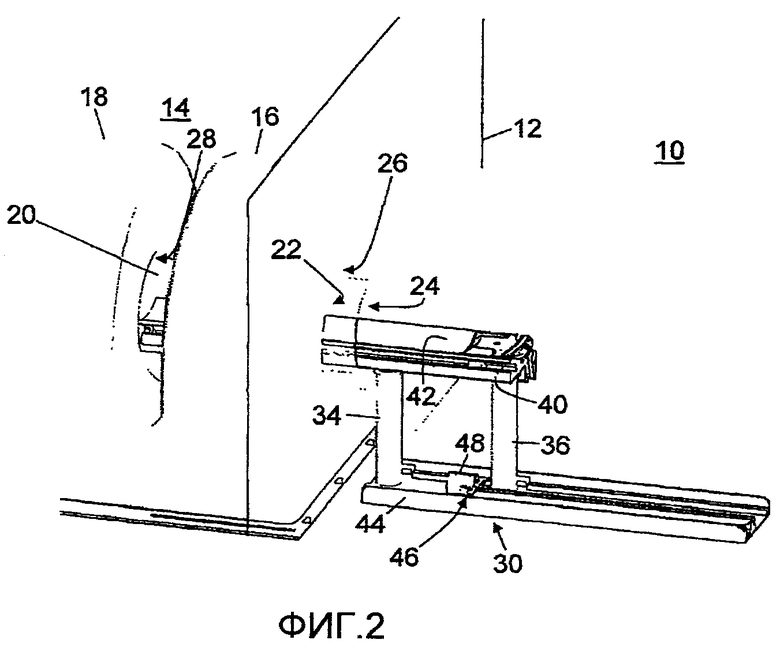
На фиг.1 и 2 схематически показана изолированная зона в сочетании с расположенными снаружи трансмиссионными компьютерными (СТ) томографами и эмиссионными (PET) томографами и тоннелем для доставки объекта, проходящим от изолированной зоны до каналов в трансмиссионных компьютерных томографах и эмиссионных томографах. На фиг.1 показана выдвинутая платформа для размещения объекта, а на фиг.2 платформа для размещения объекта показана частично введенной в тоннель.
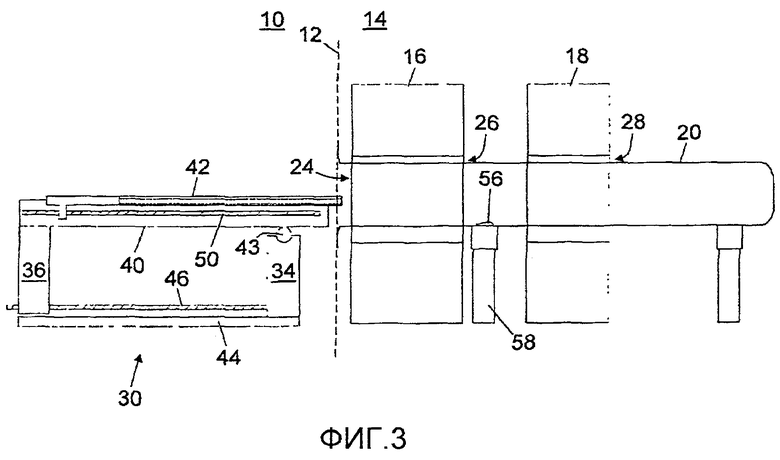
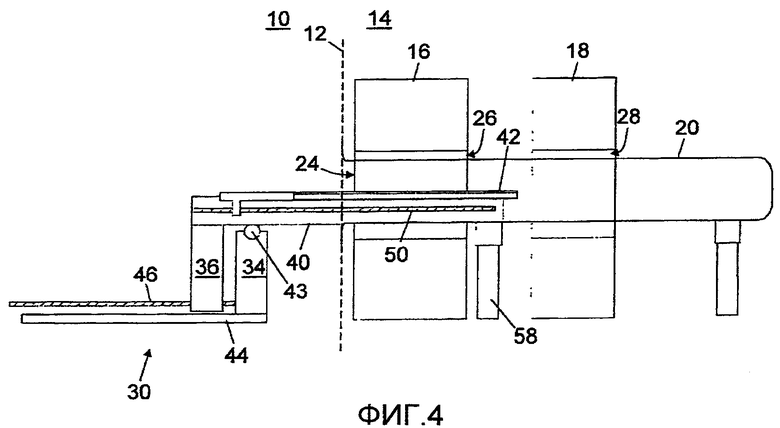
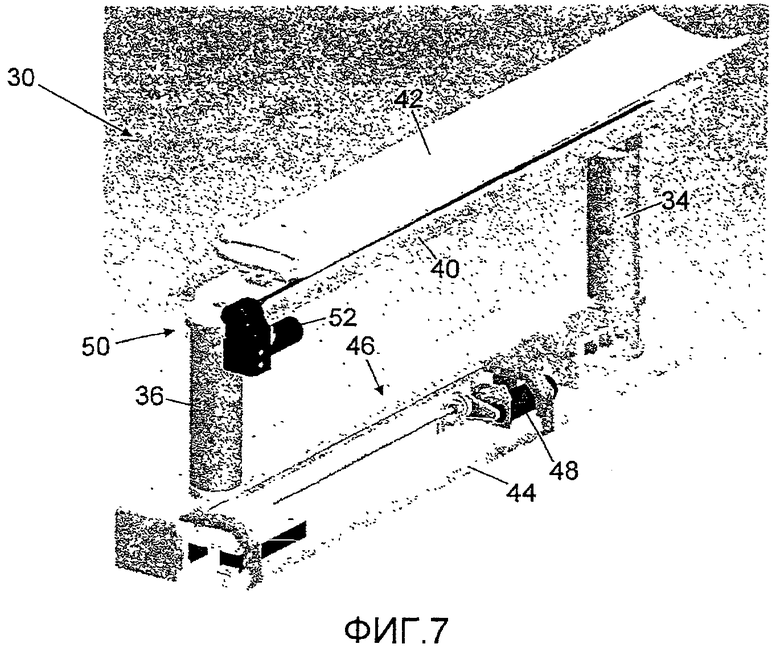
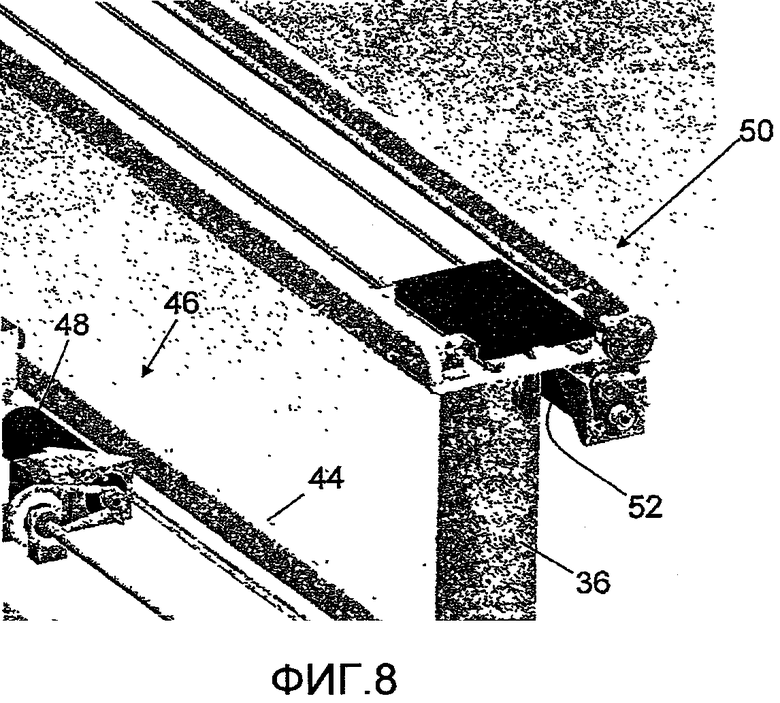
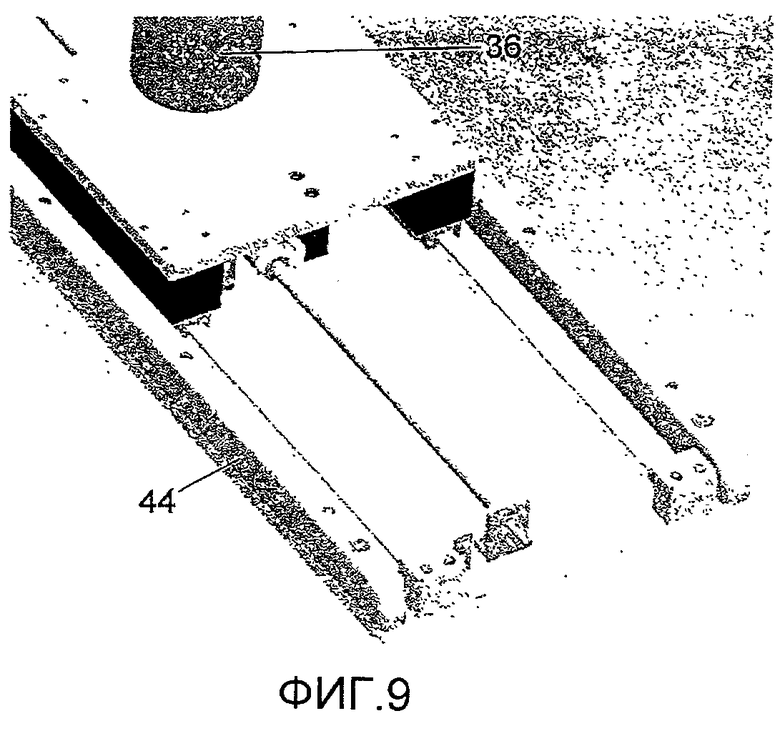
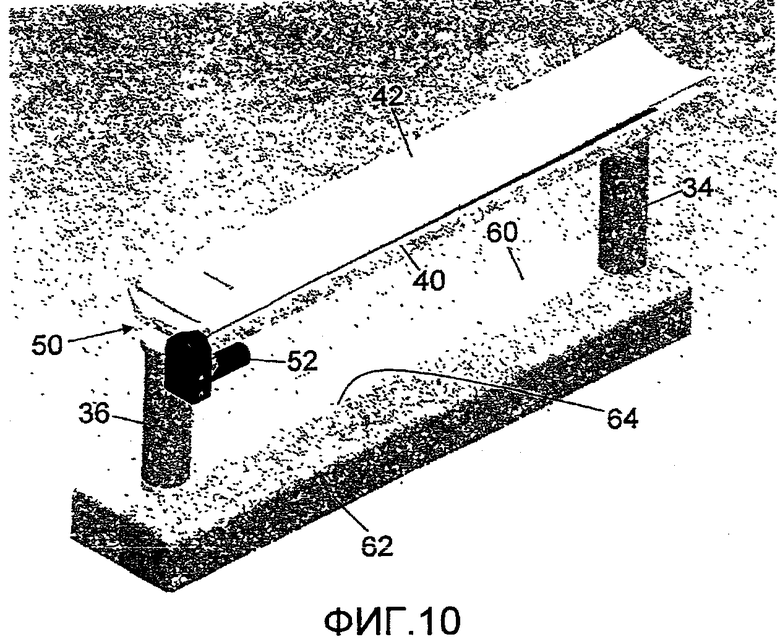
На фиг.3-10 проиллюстрирован первый вариант реализации приборного столика, предназначенного для использования в сочетании с трансмиссионными компьютерными томографами и эмиссионными томографами с фиг.1 и 2. На фиг.3-6 показан схематический вид сбоку изолированной зоны, трансмиссионных компьютерных и эмиссионных томографов и первый вариант реализации приборного столика с верхней и промежуточной поверхностью столика и платформами в различных позициях отвода назад и выдвижения. На фиг.7 показан первый вариант реализации приборного столика с одной из крышек нижнего моторизованного привода, снятой для демонстрации нижнего привода. На фиг.8 показан перспективный вид части первого варианта реализации приборного столика с верхней платформой и крышками нижнего моторизованного привода, снятыми для демонстрации верхнего и нижнего моторизованных приводов. На фиг.9 показан в крупном плане перспективный вид подвижного взаимодействия задней стойки предметного столика согласно первому варианту реализации с полом или платформой в изолированной зоне. На фиг.10 показан перспективный вид первого варианта реализации приборного столика с установленными крышками нижнего моторизованного привода.
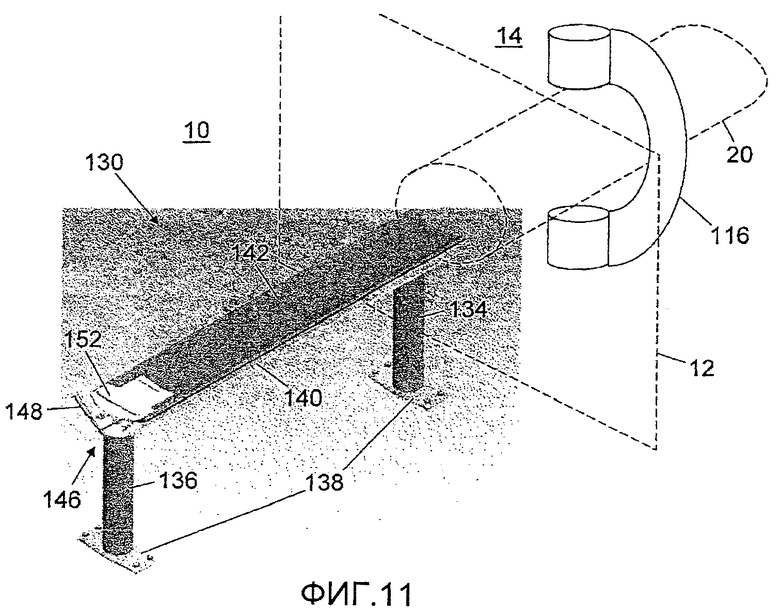
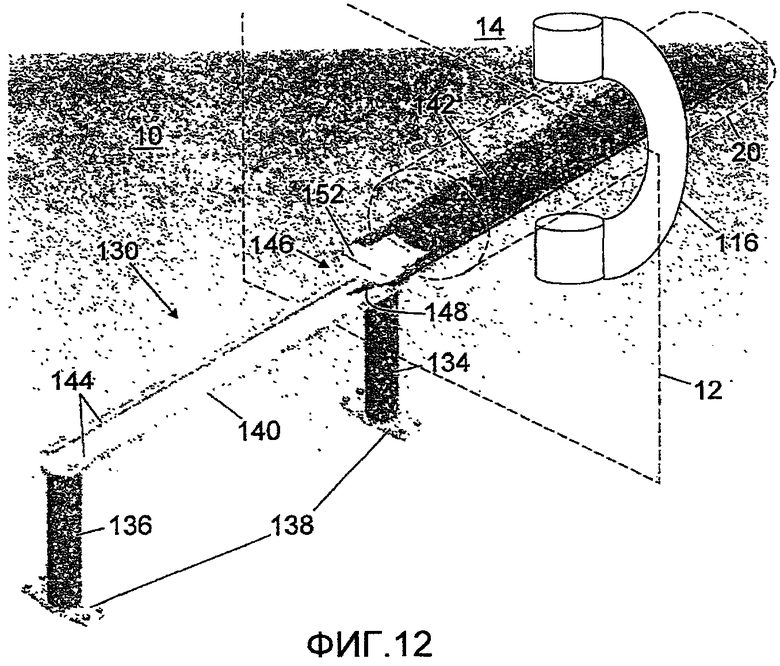
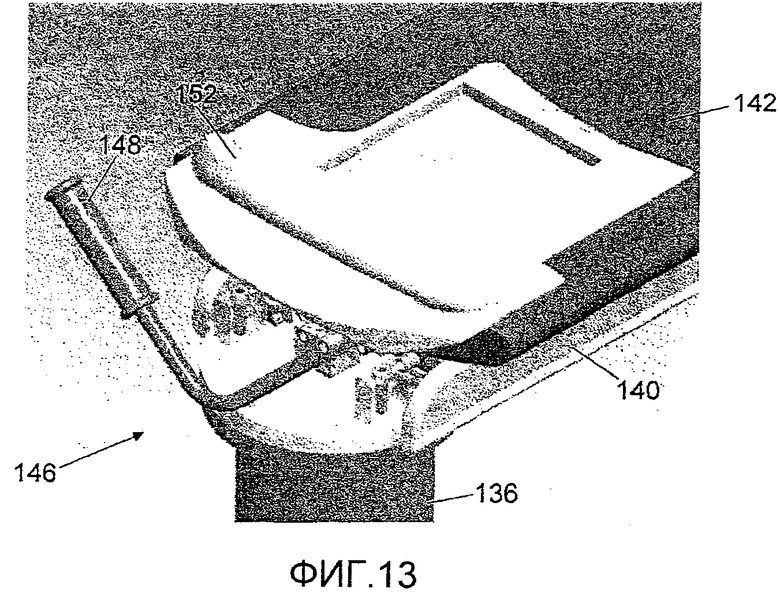
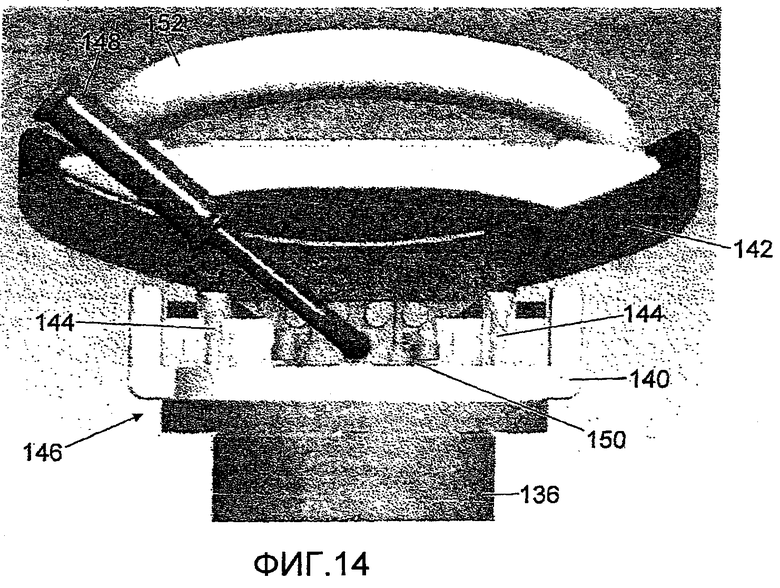
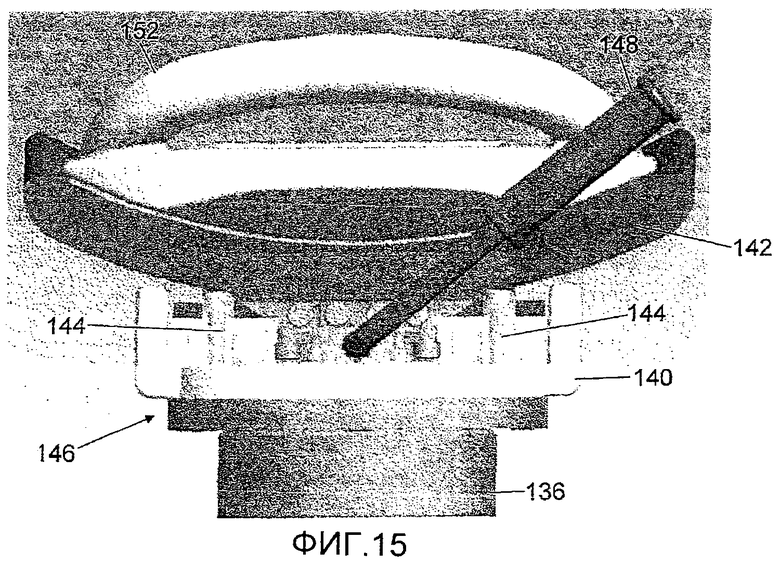
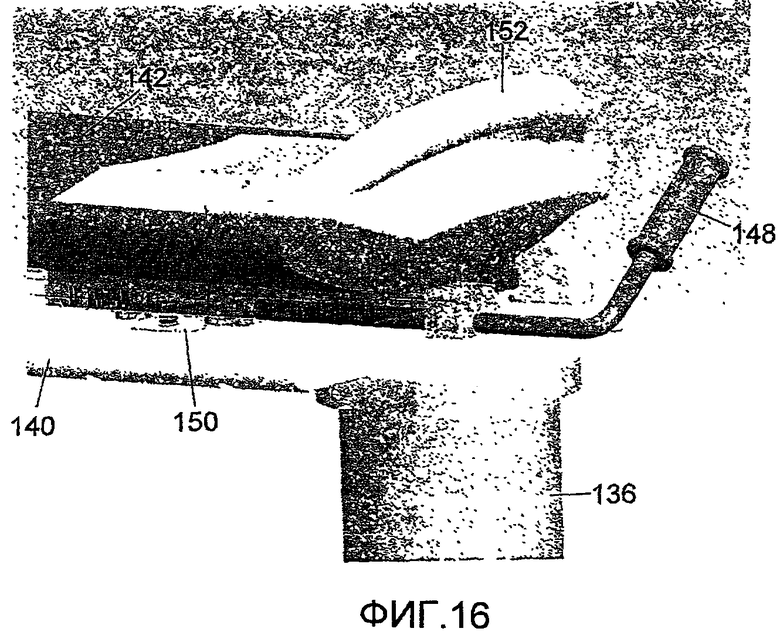
На фиг.11-16 проиллюстрирован второй вариант реализации приборного столика, подходящий, например, для продвижения объектов в рентгеновское устройство для формирования изображений с С-дугой и из него. На фиг.11 и 12 показан перспективный вид изолированной зоны, рентгеновского устройства для формирования изображений с С-дугой за пределами изолированной зоны и второй вариант реализации предметного столика с верхней поверхностью столика или платформой, отведенной назад и введенной в тоннель соответственно. На фиг.13 и 14 показаны перспективный вид и вид с заднего конца соответственно тормоза и механического привода второго варианта реализации предметного столика с включенным тормозом. На фиг.15 и 16 показаны перспективный вид и вид с заднего конца соответственно тормоза и механического привода второго варианта реализации предметного столика с выключенным тормозом.
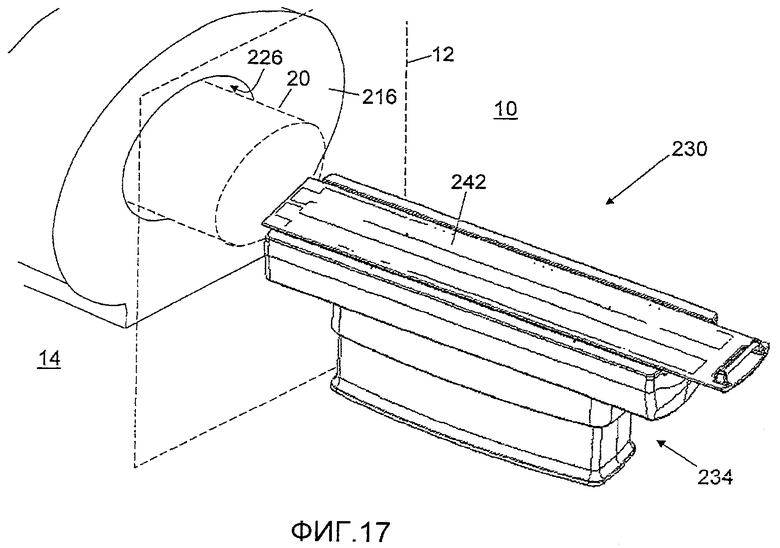
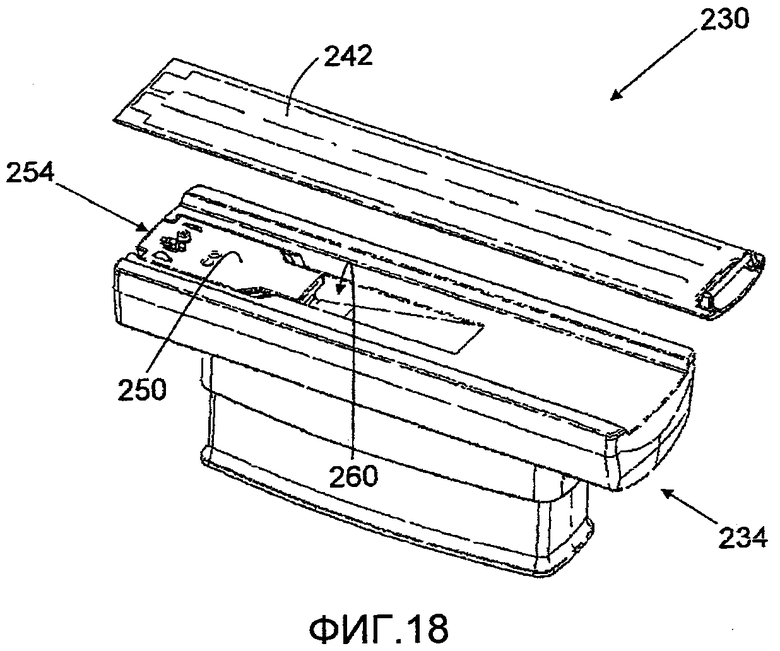
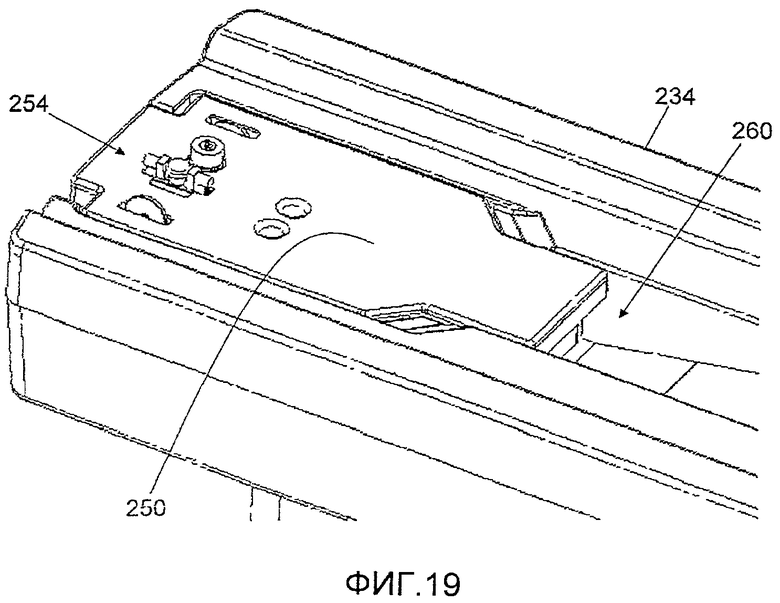
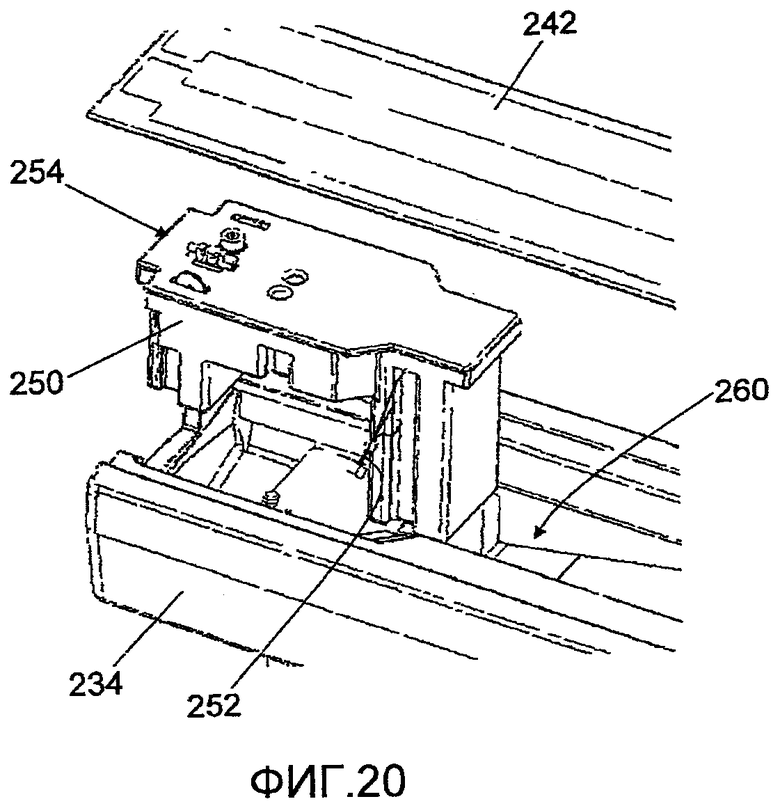
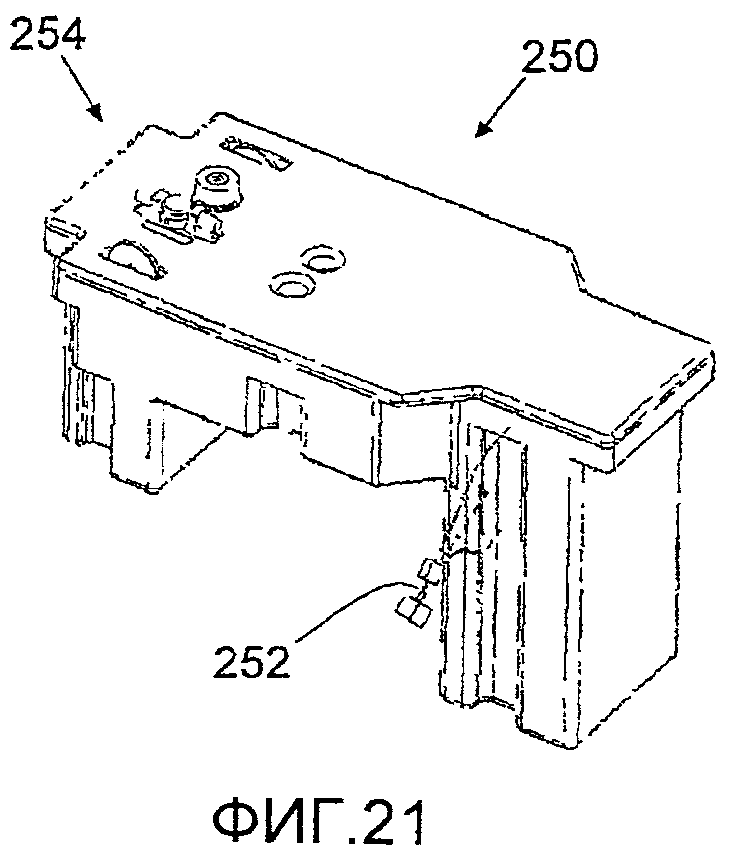
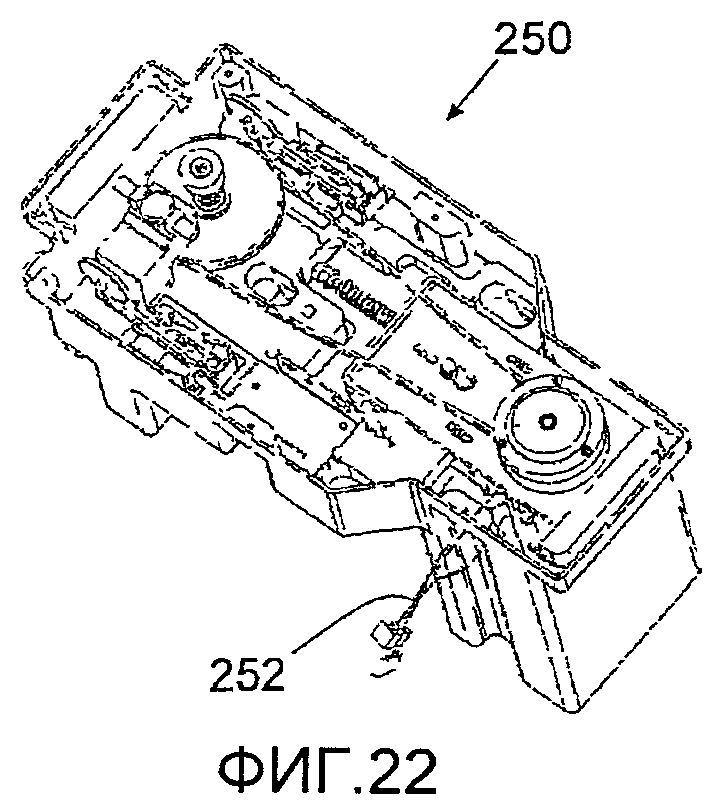
На фиг.17-24 проиллюстрирован третий вариант реализации приборного столика, подходящий, например, для продвижения объектов в магнитно-резонансный сканер и из него. На фиг.17 показан перспективный вид изолированной зоны, магнитно-резонансного сканера за пределами изолированной зоны и третьего варианта реализации предметного столика с отведенной назад верхней поверхностью столика или платформой. На фиг.18 показан перспективный вид третьего варианта реализации предметного столика с поднятой для демонстрации установленного модульного мотора верхней поверхностью столика или платформой. На фиг.19 показан в крупном плане модульный мотор, снятый с основы. На фиг.21 показан модульный мотор. На фиг.22 показан модульный мотор с частью кожуха, снятой для демонстрации внутренних компонентов.
Как показано на фиг.1 и 2, изолирующее средство включает в себя изолированную зону 10, изолированную барьером 12 от менее изолированной или неконтролируемой зоны 14. Хотя показан один представительный барьер 12, обычно изолированная зона 10 будет закрыта или герметизирована множеством таких барьеров, например четырьмя стенами, полом и потолком, ограничивающими герметизированную комнату. Доступ обеспечивается через дверную систему воздушного шлюза (не показана). В то время как представительный барьер 12 показан как прозрачный барьер, барьер может быть прозрачным, полупрозрачным или непрозрачным. Например, в некоторых вариантах реализации изолированная зона 10 замкнута стенами, полом и потолком из нержавеющей стали. В некоторых вариантах реализации изолированная зона 10 является «горячей» или «грязной» зоной, которая содержит или может содержать возбудителей заразы или инфекции, таких как передающиеся вирусы, бактерии, прионы, споры и т.д., или содержит или может содержать другой опасный фактор, такой как нервный газ или другое токсичное химическое вещество, радиоактивный материал и т.п. Инфекционное, токсичное или радиоактивное вещество может передаваться по воздуху, при физическом контакте, при приеме внутрь, при обмене физиологическими жидкостями и так далее. Инфекционное, токсичное или радиоактивное вещество может фактически присутствовать в воздухе или на поверхностях в пределах изолированной зоны 10 или может содержаться в ящике для перчаток, герметичном контейнере или в другом защитном устройстве. В первом случае изолированная зона 10 образует главную защиту от инфекционного, токсичного или радиоактивного вещества; в последнем случае изолированная зона 10 образует дополнительную или надежную защиту.
В отношении фактического или вероятного присутствия инфекционного, токсичного или радиоактивного вещества в изолированной зоне 10 применяются подходящие стандарты безопасности. В некоторых вариантах реализации изолированная зона 10 является биологически опасной или загрязненной зоной, которая поддерживается на уровне биологической безопасности 4 (BSL-4), предусматривающем такие предосторожности, как герметизация изолированной зоны 10, поддержание в изолированной зоне 10 отрицательного перепада давления относительно менее изолированной или неконтролируемой зоны 14, периодическое обеззараживание опасной зоны 10, ограничение доступа в изолированную зону 10 для подготовленного персонала в герметичных защитных костюмах с автономными дыхательными аппаратами, ограничение или исключение присутствия острых предметов или углов в изолированной зоне 10 (для того, чтобы избежать прокалывания герметичных защитных костюмов), применение подходящей процедуры обеззараживания персонала или предметов, покидающих изолированную зону 10, и так далее. В других вариантах реализации стандарты безопасности, которые применяются в изолированной зоне, выбирают на основании типа инфекции, радиоактивного вещества, токсичного вещества и так далее, которые присутствуют или могут присутствовать в опасной зоне. В некоторых вариантах реализации изолированной зоной 10 может быть чистое помещение, стерильное помещение, среда инертного газа или другая изолированная зона, более чистая и менее загрязненная, чем менее изолированная или неконтролируемая зона 14.
Зона 14 может быть менее изолированной зоной или может быть неконтролируемой зоной. Например, если изолированная зона 10 поддерживается на уровне BSL-4, зона 14 может быть менее изолированной зоной, которая поддерживается на уровне BSL-3, BSL-2 или BSL-1 изоляции или безопасности, или же зона 14 может быть неконтролируемой зоной, в которой не поддерживается какой-либо уровень изоляции или безопасности и в которую персонал и оборудование могут вводиться без специальных предосторожностей.
Изолирующее средство, показанное на фиг.1 и 2, включает в себя одну или больше системы диагностики, такие как проиллюстрированный пример медицинских приборов 16, 18 для формирования изображений, расположенных в менее изолированной или неконтролируемой зоне 14. Медицинские приборы 16, 18 для формирования изображений приспособлены для формирования изображения объекта, такого как лабораторное подопытное животное или инфицированное лицо, переносчика болезнетворных микроорганизмов, такого как растение, которое может нести инфекцию, и так далее, расположенного в изолированной зоне 10. Для целей описания под медицинскими приборами 16, 18 подразумеваются трансмиссионные компьютерные томографы и эмиссионные томографы соответственно. Однако в более общем смысле один или больше медицинские приборы 16, 18 для формирования изображений могут включать в себя, например, магнитно-резонансный (MR) сканер, эмиссионный (PET) томограф, гамма-камеру для однофотонной эмиссионной компьютерной томографии (SPECT), трансмиссионный компьютерный томограф (СТ), рентгеновское средство для формирования изображений и так далее. В еще более общем смысле системы 16, 18 диагностики могут включать в себя системы диагностики, не формирующие изображения, такие как оптическая или магнитно-резонансная система спектроскопии, счетчик Гейгера и так далее (не проиллюстрированы). Медицинские приборы для формирования изображений или другие системы диагностики обычно являются дорогостоящими и обычно включают в себя большое количество деталей, некоторые из которых могут оказаться не совместимыми с коррозионными веществами, нагревом или другими процедурами обеззараживания, применяемыми в изолированной зоне 10.
Соответственно системы 16, 18 диагностики располагаются в менее изолированной или неконтролируемой зоне 14 и отображают или иным образом оперативно соединяются с объектом, расположенным в изолированной зоне 10, через подходящий тоннель 20, размещенный на барьере 12, отходящем от изолированной зоны 10. Тоннель 20 имеет внутренний объем 22, открытый в изолированную зону 10 и оперативно соединенный с системами диагностики 16, 18. Проем 24 тоннеля 20 сообщается с изолированной зоной 10. Внутренний объем 22 тоннеля 20 изолирован от менее изолированной или неконтролируемой зоны 14, например, благодаря наличию кромок проема 24, герметично скрепленных с барьером 12, и имеет герметичную крышку или иное завершение на своем дальнем конце, причем завершение выполнено из такого же материала, и дополнительно прилегает к тоннелю. В других вариантах реализации крышка может быть выполнена из материала, иного, чем материал тоннеля. В проиллюстрированном варианте реализации тоннель 20 является цилиндрическим с круглым поперечным сечением и проходит через канал 24 первого медицинского прибора для формирования изображения 16 и через канал 26 второго медицинского прибора для формирования изображения 18. Понятно, что проиллюстрированный тоннель 20 служит примером - в других предполагаемых вариантах реализации тоннель может иметь коническую форму с сужением, может иметь эллиптическое, прямоугольное, квадратное или имеющее иную форму поперечное сечение и так далее.
Тоннель 20 позволяет оперативно соединить объект в изолированной зоне 10 с системой или системами 16, 18 диагностики, расположенными вне изолированной зоны 10. Например, если система или системы диагностики 16, 18 являются медицинскими системами формирования изображений, тоннель 20 позволяет формировать изображение объекта, размещенного во внутренней полости 22 тоннеля 20. В зависимости от способа формирования изображения и диагностики тоннель 20 может обладать или не обладать оптической прозрачностью. Например, в случае магнитно-резонансного сканера тоннель 20 может быть оптически непрозрачным или оптически прозрачным, но должен быть немагнитным, чтобы позволять высокочастотным полям и приложенным магнитным полям и градиентам магнитного поля проходить сквозь тоннель 20 по существу беспрепятственно. При компьютерной томографии тоннель 20 должен быть выполнен из материала, по существу прозрачного к пропускаемым рентгеновским лучам. При эмиссионной (PET) томографии и однофотонной эмиссионной компьютерной томографии (SPECT) тоннель 20 должен быть выполнен из материала, по существу прозрачного для излучения, испускаемого радиоактивным препаратом, введенным в объект. Например, при эмиссионной томографии гамма-лучи с энергией 511 килоэлектрон-вольт, которые генерируются при аннигиляции электрон-позитронных пар, должны по существу беспрепятственно проходить через тоннель 20. При фотографическом формировании изображений тоннель 20 должен быть оптически прозрачным. При диагностическом наблюдении с использованием счетчика Гейгера тоннель должен быть по существу прозрачным для того типа радиации, который может присутствовать в объекте.
Предпочтительно системы 16, 18 диагностики располагаются вне изолированной зоны 10 и поэтому подвергаются обеззараживанию или другим процедурам биологической безопасности, которые предусмотрены для персонала и предметов, размещенных в изолированной зоне 10. Системы 16, 18 диагностики могут управляться, например, персоналом, размещенным в менее изолированной или неконтролируемой зоне 14, который не носит герметичные защитные костюмы. Однако предметный столик 30, который используется для продвижения объекта во внутренний объем 22 тоннеля 20 и из него, располагается внутри изолированной зоны 10.
На фиг.1 второй медицинский прибор 18 для формирования изображений отведен от первого медицинского прибора для формирования изображений 16 на расстояние D. В проиллюстрированном варианте реализации обеспечено подвижное взаимодействие 32, такое как показанные на иллюстрации направляющие 32, между прибором 18 для формирования изображений и платформой или полом, поддерживающим прибор 18 для формирования изображений вне изолированной зоны 10. Подвижное взаимодействие обеспечивает линейное перемещение системы 18 формирования изображений вдоль тоннеля 20 между рабочим положением (показано на фиг.2) и положением для технического обслуживания (показано на фиг.1). В положении для технического обслуживания, показанном на фиг.1, второй медицинский прибор 18 для формирования изображений отделен от первого медицинского прибора 16 для формирования изображений таким образом, чтобы облегчить ремонт или техническое обслуживание медицинских приборов 16, 18 для формирования изображений. Например, если медицинским прибором для формирования изображений является трансмиссионный компьютерный томограф, разделение медицинских приборов 16, 18 для формирования изображений промежутком В может облегчить удаление панели для размещения подставки томографа для того, чтобы обеспечить доступ к рентгеновскому тоннелю (не показан) с целью его замены. Понятно, что рабочее положение и положение для технического обслуживания могут быть четко определенными положениями или же могут быть приблизительными положениями или рядом положений. Например, положение для технического обслуживания может быть непрерывным рядом положений или значений промежутка D, которые достаточно велики для того, чтобы облегчить предполагаемые действия по техническому обслуживанию.
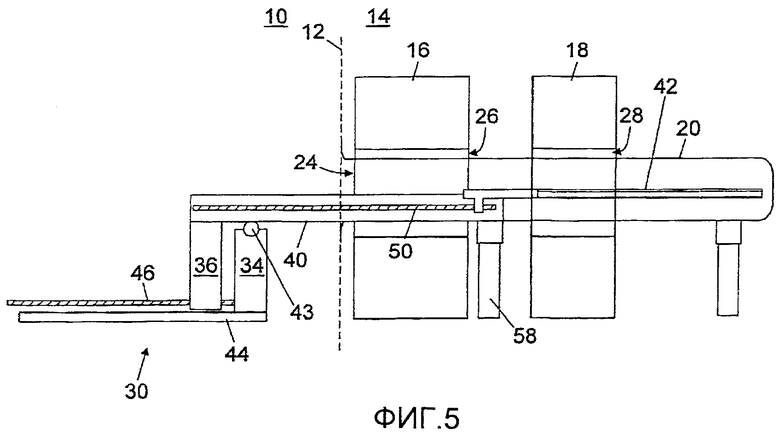
Согласно продолжению ссылок на фиг.1 и 2 и при дополнительной ссылке на фиг.3-10, предметный столик 30 включает в себя основу, которая включает в себя переднюю опорную стойку 34 и заднюю опорную стойку 36. Узел платформы включает в себя промежуточную протяженную верхнюю поверхность столика или платформу 40 и верхнюю протяженную верхнюю поверхность столика или платформу 42. Передняя опорная стойка 34 прикреплена к полу или платформе 44 и подвижно взаимодействует с промежуточной удлиненной платформой 40. Например, промежуточная удлиненная платформа 40 может скользить по передней стойке 34 или может катиться на роликах 43, расположенных между промежуточной удлиненной платформой 40 и верхним концом передней стойки 34, и так далее. Задняя опорная стойка 36 прикреплена к промежуточной удлиненной платформе 40 и подвижно взаимодействует с полом или платформой 44. Нижний моторизованный привод 46, который включает в себя модульный мотор 48, располагается на полу или платформе 44 или внутри ее и взаимодействует с задней опорной стойкой 36 для перемещения задней опорной стойки 36 относительно передней опорной стойки 34 таким образом, чтобы перемещать промежуточную удлиненную платформу 40 и верхнюю удлиненную платформу 42 вместе по передней опорной стойке 34 в тоннель 20 или из него. Кроме того, верхний моторизованный привод 50, который включает в себя модульный мотор 52, располагается на промежуточной удлиненной платформе 40 или внутри нее и взаимодействует с верхней удлиненной платформой 42 для перемещения верхней удлиненной платформы 42 относительно промежуточной удлиненной платформы 40.
Моторизованные приводы 46, 50 разделены в пространстве, причем моторизованный привод 46, предназначенный для промежуточной удлиненной платформы 40, располагается на полу или платформе 44 или внутри ее, а моторизованный привод 50, предназначенный для удлиненной платформы 42, располагается на промежуточной удлиненной платформе 40 или внутри ее. Такое пространственное разделение приводов обеспечивает доступность, необходимую для обеззараживания или ремонта компонентов привода. Кроме того, размещение моторизованного привода 46, предназначенного для промежуточной удлиненной платформы 40, на полу уменьшает вес, который поддерживают стойки 34, 36, и позволяет сделать промежуточную удлиненную платформу менее тяжелой и более компактной. Это является преимуществом в условиях изолированной среды, показанной на фиг.1 и 2, но является также преимуществом в других условиях, включая обычные системы больничного и другого медицинского оборудования.
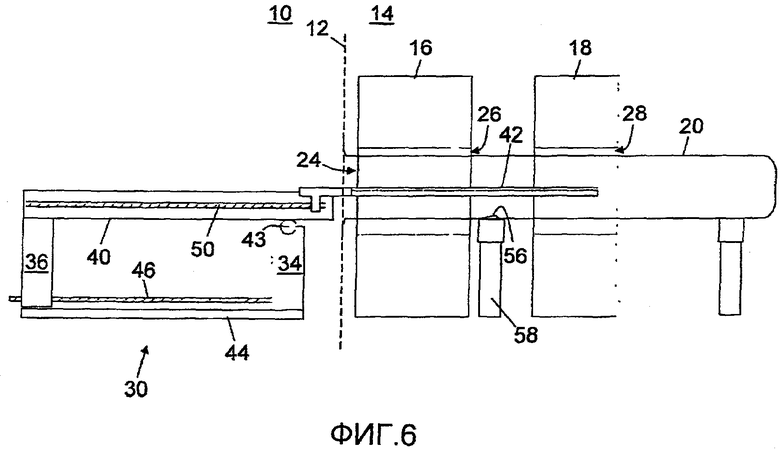
На фиг.3 показан приборный столик 30 с обеими платформами 40, 42, полностью отведенными назад. На фиг.3 показан также элемент 56 зацепления, такой как уступ 56, расположенный в тоннеле 20, предназначенный для зацепления и прекращения продвижения вперед в тоннель 20 удлиненной промежуточной платформы 40. В проиллюстрированной компоновке элемент 56 зацепления совмещен с опорой 58 тоннеля, расположенной вне изолированной зоны 10 и поддерживающей тоннель 20, так что тоннель 20 поддерживает элемент 56 зацепления в позиции опоры 58 тоннеля с целью уменьшить отклонение иным образом закрепленной платформы 40.
На фиг.4 показано выдвижение промежуточной удлиненной платформы 40 с использованием нижнего моторизованного привода 46, в то время как на фиг.5 показано дополнительное выдвижение верхней удлиненной платформы 42 с использованием верхнего моторизованного привода 50 (см. фиг.5). Как показано на фиг.4, промежуточная удлиненная платформа 40 выдвигается до вхождения во взаимодействие с элементом 56 зацепления, который образует опору для промежуточной удлиненной платформы 40 в выдвинутом положении. Поскольку элемент 56 зацепления совмещен с опорой 58 тоннеля, нагрузка на тоннель 20 ограничивается. В вариантах реализации, в которых тоннель 20 выполнен из достаточно прочного и жесткого материала, предусматривается возможность размещения элемента зацепления в тоннель в положении, не совмещенном с опорой тоннеля. Как показано на фиг.5, в то время, когда верхняя удлиненная платформа 42 также выдвинута, она располагается в канале 28 второго медицинского прибора 18 для формирования изображений (которым может быть, например, эмиссионный томограф) и поддерживается в виде консоли относительно промежуточной удлиненной платформы 40.
Дополнительно нижний моторизованный механический привод 46 может быть блокирован таким образом, что удлиненная промежуточная платформа 40 не может выдвигаться из тоннеля 20, если удлиненная верхняя платформа 42 находится в отведен назад положении. Блокировка позволяет избежать несбалансированной конфигурации столика, при которой удлиненная промежуточная платформа 40 частично отведена назад и поэтому не поддерживается элементом 56 зацепления, в то время как верхняя платформа 42 выдвинута для создания значительного момента вращения на промежуточной платформе 40.
Как показано на фиг.6, для формирования изображения с использованием первого медицинского прибора для формирования изображения 16, расположенного ближе всего к изолированной зоне 10 (которым может быть, например, трансмиссионный компьютерный томограф), начиная с положения полного отвода назад с фиг.3, промежуточная удлиненная платформа 40 остается отведенной, а верхняя удлиненная платформа 42 выдвинута с использованием верхнего моторизованного привода 50 с целью ввода верхней удлиненной платформы 42 в тоннель 20, совмещенный с каналом 26 первого медицинского прибора 16 для формирования изображения. При этой компоновке верхняя удлиненная платформа 42 опирается консольным путем на основу, включающую отведенную назад промежуточную платформу 40.
Для использования предметного столика 30 в изолированной среде с BSL-4 или другой высокой степенью защиты обычно обеспечиваются условия для поддержки выполнения процедур обеззараживания. Например, как показано на фиг.10, нижний моторизованный привод 48 дополнительно покрыт крышками 60, 62. Уплотнение из резиновой полосы 64, размещенное между крышками 60, 62, по существу герметизирует щель в крышках привода 60, 62, вдоль которой может перемещаться опорная стойка 36. Стойка 36 должным образом сужена до Т-образной формы в основании для того, чтобы обеспечить возможность герметизации посредством узкой уплотнительной полосы 64. Таким образом, нижний моторизованный привод 48 по существу герметично защищен от случайного проникновения жидкости или падения предметов на нижний моторизованный привод 48. В некоторых вариантах реализации модульные моторы 48, 52 нижнего и верхнего моторизованных приводов 46, 50 соответственно являются взаимозаменяемыми, так что в изолированной зоне 10 может помещаться модульный мотор одного типа, что позволяет выгружать модульный мотор для обеззараживания или для выявления неисправностей в моторе. Модульные моторы 48, 52 дополнительно являются также герметично закрытыми таким образом, что только внешняя сторона мотора открыта воздействию среды в изолированной зоне 10. В некоторых вариантах реализации верхняя удлиненная платформа 42 приспособлена к тому, чтобы ее можно было легко снимать для облегчения обеззараживания расположенного ниже верхнего моторизованного привода 50.
Компоненты приборного столика 30 обычно делают из нержавеющей стали, совместимой с обычными применяемыми для обеззараживания химическими средствами и с процессами типа применяемых при изоляции по уровню BSL-4. Винты обычно покрывают тефлоном для создания сопротивления применяемым для обеззараживания химическим средствам и процессам, а также для снижения вероятности заедания винта. Сквозные отверстия, глухие отверстия и тому подобное обычно заполняют эпоксидом, силиконом и тому подобным для уменьшения точек сбора загрязнений. Передающие электрические кабели для моторизованных приводов 48, 50 обычно являются ленточными кабелями, которые легко протирать во время обычного обеззараживания. Моторизованные приводы 48, 50 дополнительно приспособлены к легкому отделению с целью выполнения обеззараживания или замены. Например, в одном варианте реализации покрытые тефлоном винты с противоположных концов узла привода снимают с целью подъема моторизованного привода. Передние и задние стойки 34, 36 являются обычно полыми цилиндрами из нержавеющей стали. Концы передней стойки 34 должным образом заварены для герметизации внутренней полости стального цилиндра, так что только внешняя сторона передней стойки открыта воздействию изолированной зоны 10. Концы задней стойки 36 герметизированы резиновыми башмаками с целью предотвратить проникновение загрязнений. Электрические кабели при желании располагаются с наружной стороны стоек 34, 36 для того, чтобы облегчить замену и обеззараживание кабелей.
Предметный столик 30 является приведенным в качестве иллюстрации примером, должным образом приспособленным для того, чтобы обеспечить позиционирование объекта, размещенного на верхней удлиненной платформе 42 или в канале 26 медицинского прибора для формирования изображений 16, или в канале 28 медицинского прибора 18 для формирования изображений.
Со ссылкой на фиг.11-16 описан другой предметный столик 130, который подходит, например, для позиционирования объекта в схематически проиллюстрированном рентгеновском устройстве для формирования изображений с С-дугой 116, расположенном в менее изолируемой или неконтролируемой зоне 14. Предметный столик 130 располагается в изолированной зоне 10 и включает в себя переднюю и заднюю опорные стойки 134, 136, которые обе прикреплены к полу или платформе изолированной зоны 10, например, в форме показанных на иллюстрации базовых пластин 138. Противоположные концы опорных стоек 134, 136 прикреплены к протяженному горизонтальному базовому элементу 140. Протяженная верхняя поверхность столика или платформа 142 поддерживается протяженным горизонтальным базовым элементом 140, и ее размеры позволяют помещать ее внутри тоннеля 20 (показан пунктиром на фиг.11 и 12). В положении отвода назад (фиг.11) платформа 142 лежит по существу на верху базового элемента 140. В выдвинутом положении (фиг.12) платформа 142 перемещается вдоль направляющих 144 базового элемента 140 в тоннель 20. Часть платформы 142, которая выдвигается с горизонтального базового элемента 140, опирается консольным путем на базовый элемент 140 при ее выдвижении в тоннель 20 для совмещения с участком формирования изображений рентгеновского устройства для формирования изображений с С-дугой 116. Поскольку предметный столик 130 включает в себя только один компонент платформы 142 вместо двух компонентов платформы 40, 42 в предметном столике 30, предметный столик 130 подходит для выполнения задач формирования изображений, которые предусматривают перемещение объекта на ограниченное или короткое расстояние, таких как единая система формирования изображений, в которых объект не перемещается во время формирования изображения. Однако предметный столик 130 предназначается также для других видов использования, таких как спиральное формирование изображения в трансмиссионном компьютерном томографе, при котором объект перемещается во время формирования изображения.
В отличие от моторизованного предметного столика 30, предметный столик 130, показанный на фиг.11-16, включает в себя ручной механический привод 146, который лучше всего показан на фиг.13-16. Для того чтобы облегчить работу персонала, который носит перчатки или другое ограничивающее подвижность изолирующее снаряжение, механический привод 146 предусматривает продвижение или возврат платформы 142 только вручную и манипулирование ручным тормозом 148. На фиг.13 и 14 показан ручной тормоз 148 в положении «включен» (т.е. положении торможения), при котором рычаг ручного тормоза 148 нажимает на фрикционный тормозной элемент 150 между платформой 142 и горизонтальным базовым элементом 140 с целью получения фрикционного торможения. Фрикционный тормозной элемент 150 фиксирует с помощью силы трения платформу 142 относительно базового элемента 140 для того, чтобы предотвратить перемещение платформы 142 относительно базового элемента 140, когда тормоз 148 действует. На фиг.15 и 16 показана компоновка при ручном тормозе в положении «выключено» (т.е. положении отсутствия торможения), при котором фрикционный тормозной элемент 150 отводится, позволяя платформе 142 перемещаться относительно протяженного горизонтального базового элемента 140. Перемещение платформы 142 выполняется соответствующим образом вручную, путем продвижения или возврата с использованием подходящего захвата, такого как ручной тормоз 148 или ручка 152 платформы.
Со ссылкой на фиг.17-25 описан другой предметный столик 230, который подходит, например, для размещения объекта в схематически проиллюстрированном магнитно-резонансном сканере 216, расположенном в менее изолированной или неконтролируемой зоне 14, с тоннелем 20, пропущенным через канал 226 магнитно-резонансного сканера 216. В других вариантах реализации магнитно-резонансный сканер может быть сканером с открытым каналом или иметь другую конфигурацию участка формирования изображения. Предметный столик 230 включает в себя основание 234, расположенное на полу или платформе в изолированной зоне 10, и верхнюю поверхность столика или платформу 242, опирающуюся на основу 234. Модульный мотор 250, расположенный на основе 234, находится в зубчатом зацеплении для перемещения верхней поверхности столика или платформы 242 вдоль, в общем, горизонтальной верхней поверхности основы 234 по направлению в тоннель 20. В некоторых вариантах реализации тоннель 20 опирается на стенки канала 226 сканера, так что тоннель 20 может выдерживать значительный вес - в таких вариантах реализации предполагается возможность закрепления верхней поверхности столика 242 консольным путем на конце основы 234 при ее продвижении в тоннель 20, подобно, например, консольному размещению платформы 142 на предметном столике 130 на фиг.11-16.
Как показано на фиг.18, для облегчения обеззараживания и доступа к расположенным ниже компонентам верхняя поверхность столика или платформа 242 может сниматься с основы 234 таким образом, чтобы открыть модульный мотор 250. Как показано на фиг.20, при снятой верхней поверхности столика 242 модульный мотор 250 может быть снят с основы 234 как единый узел. Как показано на фиг.21 и 22, модульный мотор 250 является герметично закрытым узлом, который содержит смазанные элементы моторизованного привода верхней поверхности столика (см. фиг.22, на которой верхняя крышка герметичного кожуха мотора 250 снята для показа внутренних компонентов). Соответственно модульный мотор 250 может быть снят как единый узел и помещен в емкость для обеззараживания, а также заменен другим модульным мотором. Модульный мотор 250 включает в себя электрический кабель 252, который приспособлен для соединения с электрической панелью (не показана) в изолированной зоне 10. Модульный мотор 250 включает также в себя открытую механическую зубчатую передачу 254, которая оперативно соединяется с соответствующей механической зубчатой передачей (не показана) на нижней стороне верхней поверхности столика или платформы 242.
Модульный мотор 250 располагается относительно близко к магнитно-резонансному сканеру 216. Соответственно магнитно-резонансный сканер 216 создает притягивающее магнитное поле, которое может притягивать модульный мотор 250 в направлении тоннеля 20 и канала 226. Для того чтобы свести к минимуму опасность того, что модульный мотор 250 будет непреднамеренно притянут магнитной силой к магнитно-резонансному сканеру 216 во время извлечения, установка модульного мотора 250 на основе 234 выполняется таким образом, что модульный мотор 250 извлекается из основы 234 как единый узел вдоль щели 260 в направлении от системы диагностики, таким образом, чтобы отвести модульный мотор от притягивающего магнитного поля, которое генерируется магнитно-резонансным сканером 216. Щель 260 гарантирует, что модульный мотор 250 можно захватить и выдвинуть, в общем, направлении от магнита магнитно-резонансного сканера, не проколов при этом руку, которой выполняется захват.
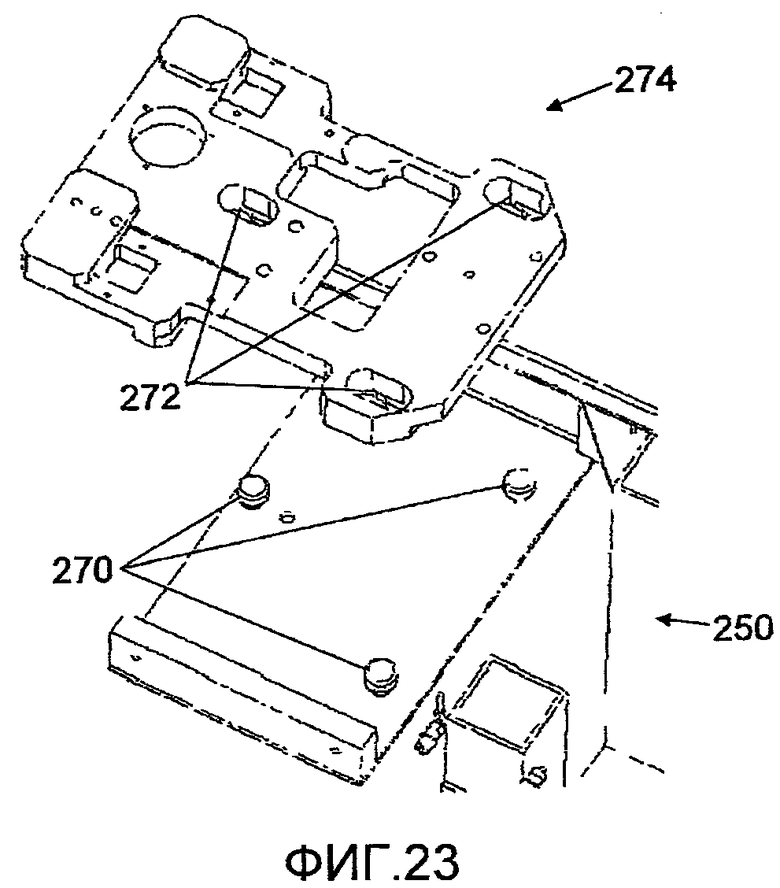
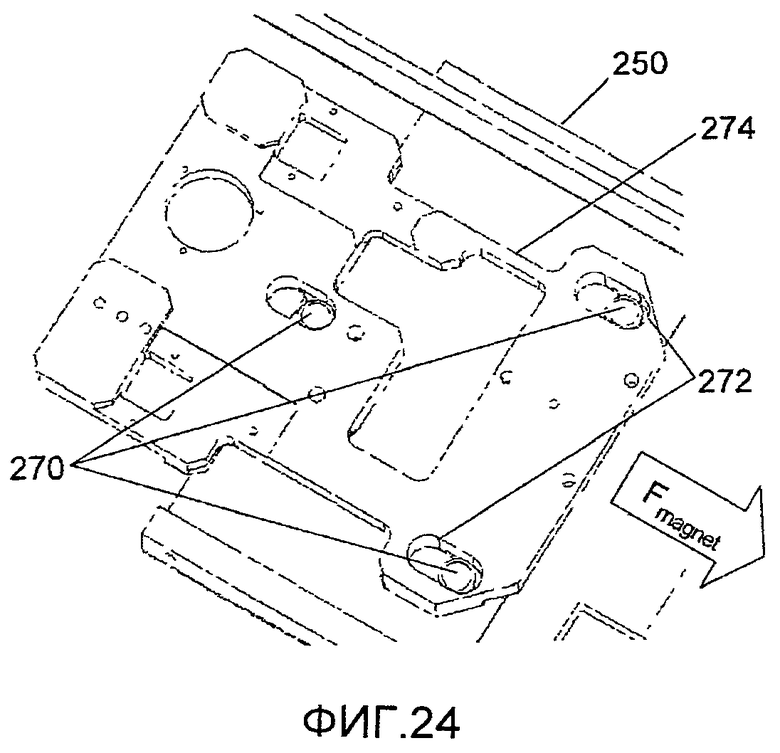
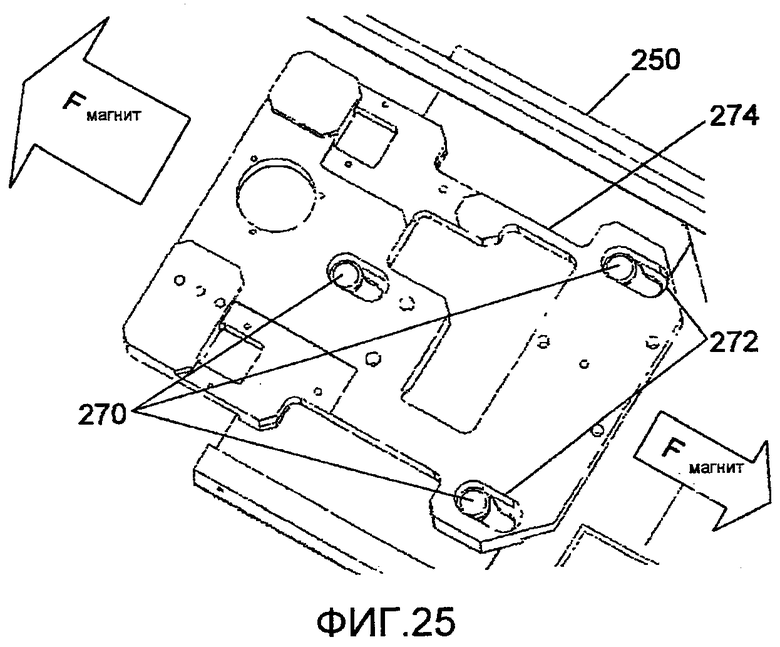
Как показано на фиг.23-25, в некоторых вариантах реализации используется штыковое шпоночное соединение, позволяющее гарантировать, что модульный мотор 250 отводится в целом от притягивающего магнитного поля, которое генерирует магнитно-резонансный сканер 216. Модульный мотор имеет нижнюю поверхность 266, включающую в себя штыки 270, которые вставляют в шпоночные пазы 272 пластины 274 основы 234. (С другой стороны, штыки могут быть расположены на основе, а шпоночные пазы располагаются на моторе.) На фиг.24 показано положение фиксации, при котором штыки 270 находятся в узкой части шпоночных пазов 272. При такой компоновке усилие, приложенное магнитом магнитно-резонансного сканера к мотору 250 (и обозначенное на фиг.24 и 25 стрелкой «Fmagnet»), имеет тенденцию к удержанию модульного мотора 250 в фиксированном положении с фиг.24. На фиг.25 показано положение освобождения, которое достигается путем приложения оператором снимающего усилия к мотору 250 (обозначено стрелкой «Fremoval» на фиг.25 с действующим мотором 250), которое является противоположным и больше силы магнита. Снимающее усилие (Fremoval) перемещает штыки 270 к широкой части шпоночных пазов 272. В этом показанном на фиг.25 положении освобождения модульный мотор 250 может быть поднят с основы 234 так, как показано, например, на фиг.20, поскольку головки штыков 270 могут пройти через широкую часть шпоночных пазов 272. Вместо проиллюстрированного штыкового шпоночного соединения может использоваться другое линейное быстроразъемное соединение, имеющее подходящую направленность разъема. Щель 260 дает достаточно места для захвата модульного мотора 250 с целью отвода его от магнита и подъема, не прокалывая при этом выполняющую захват руку или пальцы.
Направленное быстроразъемное соединение 270, 272 гарантирует отвод мотора от притягивающей магнитной силы Fmagnet. Это уменьшает вероятность притягивания мотора к магнитно-резонансному сканеру 216. Кроме того, такая компоновка снабжает лицо, снимающее мотор, извещением о притягивающей магнитной силе Fmagnet, поскольку это лицо должно тянуть мотор (то есть прикладывать снимающее усилие Fremoval), преодолевая сопротивление магнитной силы Fmagnet.
При изолированной среде типа BSL-4 проиллюстрированные примеры предметных столиков 30, 130, 230 дополнительно сконструированы таким образом, чтобы поддаваться разборке или ремонту с использованием одного инструмента. Например, все доступные для пользователя компоненты могут быть закреплены винтами, имеющими один тип головки, с которыми можно работать, пользуясь обычной отверткой. Вместо винтов могут также использоваться другие стандартные съемные крепежные изделия типа болтов. Предметные столики 30, 130, 230 могут иметь также быстроразъемную верхнюю платформу (т.е. верхнюю удлиненную поверхность столика или платформу 42 столика 30, или верхнюю поверхность столика или платформу 142 столика 130, или верхнюю поверхность столика или платформу 242 столика 230), которая облегчает отделение платформы и получение доступа к нижним компонентам для их стерилизации, замены или технического обслуживания. Такие быстроразъемные платформы могут также быть быстро отделенными от моторизованного привода с целью облегчить аварийное извлечение платформы (и, следовательно, объекта) из тоннеля 20 вручную.
Предметные столики 30, 130, 230 дополнительно обладают высокой степенью модульного построения с целью облегчить помещение в емкости и быструю замену компонентов в изолированной зоне 10. Например, моторы 48, 52, 250 привода могут быть сняты как единый узел и помещены в емкость для обеззараживания, а вместо них может быть установлен сменный модульный мотор привода. Кроме того, нижний и верхний моторы привода 48, 52 предметного столика 30 могут быть взаимозаменяемыми для того, чтобы уменьшить запас сменных моторов, который содержится в изолированной зоне 10. В некоторых вариантах реализации механические приводы являются в высшей степени модульными, так что, например, в некоторых вариантах реализации зубчатая передача и ведущий вал каждого моторизованного привода 46, 50 предметного столика могут устанавливаться и сниматься как один узел.
Предметные столики 30, 130, 230 предпочтительно выполнены из нержавеющей стали, крепежных изделий с покрытием из тефлона и других открытых компонентов, противостоящих обеззараживающим химическим средствам, применяемым при обеззараживании изолированной зоны 10. В случае, например, изолированной зоны 10 BSL-4, открытые компоненты предметных столиков 30, 130, 230 должны быть устойчивыми к воздействию химических средств, включающих в себя, по меньшей мере, Clydox-S, Microchem, Quat ТВ, параформальдегид, диоксид хлора, пары перекиси водорода и карбонат аммония, которые являются химическими веществами, которые обычно применяются в среде BSL-4. С другой стороны, внутренние компоненты герметизированных узлов, такие как внутренние компоненты модульного мотора 250, бывают менее устойчивыми к таким химическим веществам и могут включать в себя материалы или вещества, такие как смазки, которые обычно являются не желательными для среды BSL-4.
Изобретение было описано со ссылкой на предпочтительные варианты реализации. После прочтения и анализа предшествующего подробного описания можно прийти к выводу о возможности внесения улучшений и изменений. Предполагается, что изобретение должно быть построено с включением в него всех таких улучшений и изменений при условии, что они соответствуют объему пунктов прилагаемой формулы изобретения и ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ КОММУТАЦИОННАЯ ПАНЕЛЬ ДЛЯ СРЕД ИЗОЛЯЦИИ | 2007 |
|
RU2447560C2 |
| Способ оперативного цитологического анализа патологии шейки матки в рамках одного приема гинеколога для диагностических и скрининговых исследований и устройства для осуществления способа | 2022 |
|
RU2813628C1 |
| МОДУЛЬ И СИСТЕМА ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813210C1 |
| СПОСОБ ПОДАВЛЕНИЯ НЕРАВНОМЕРНОСТИ РАСПРЕДЕЛЕНИЯ ЯРКОСТИ ИЗОБРАЖЕНИЙ ПРИ ПОЛУЧЕНИИ ПАНОРАМНЫХ ИЗОБРАЖЕНИЙ МЕДИЦИНСКИХ МИКРОПРЕПАРАТОВ | 2008 |
|
RU2390842C1 |
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| ИМИТАТОР РАБОТЫ РЕНТГЕНОВСКОГО КОМПЬЮТЕРНОГО ТОМОГРАФА, ИСПОЛЬЗУЮЩИЙ ОПТИЧЕСКИЙ ДИАПАЗОН ИЗЛУЧЕНИЯ ДЛЯ РАБОТЫ С ТЕСТОВЫМИ ОБРАЗЦАМИ | 2010 |
|
RU2467694C2 |
| СИСТЕМА ДЛЯ ИНКУБАЦИИ И ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811721C1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В КАМЕРЕ ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2812238C1 |
| РЕТРОСПЕКТИВНАЯ СОРТИРОВКА 4D СТ ПО ФАЗАМ ДЫХАНИЯ НА ОСНОВАНИИ ГЕОМЕТРИЧЕСКОГО АНАЛИЗА ОПОРНЫХ ТОЧЕК ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2454966C2 |
| ГИБРИДНЫЕ СИСТЕМЫ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ МЕТОДАМИ ПОЗИТРОННО-ЭМИССИОННОЙ/МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2007 |
|
RU2444744C2 |
Изобретение относится к медицинской технике и может быть использовано в системе для загрузки и перемещения объекта из изолированной зоны в систему диагностики вне изолированной зоны или из нее. Тоннель отходит от изолированной зоны. Тоннель имеет внутренний объем, открытый в изолированную зону и соединенный при функционировании с системой диагностики. Удлиненная платформа для размещения объекта, размеры которой позволяют помещать ее в тоннель, расположена в изолированной зоне. Основа, которая включает в себя механический привод, расположена в изолированной зоне и выполнена с возможностью совмещения платформы для размещения объекта с тоннелем и для ввода и вывода платформы для размещения объекта в тоннель и из тоннеля. В результате облегчается работа персонала в изолирующих костюмах или с иными причинами ограничения подвижности, достигается возможность обеззараживания предметного столика с помощью коррозионных химических веществ и возможность вывода модульного мотора только путем вывода из магнита сканера. 4 н. и 30 з.п. ф-лы, 25 ил.
1. Система загрузки объекта для перемещения объекта, расположенного в изолированной зоне (10), в систему (16, 18, 116, 216) диагностики, расположенную вне изолированной зоны, и из нее, причем система загрузки объекта содержит:
тоннель (20), проходящий от изолированной зоны, причем тоннель имеет внутренний объем (22), открытый в изолированную зону и соединенный при функционировании с системой диагностики;
удлиненную платформу (40, 42, 142, 242) для размещения объекта, расположенную в изолированной зоне и имеющую размеры, позволяющие помещать ее в тоннель; и
основу (34, 36, 44, 46, 48, 234, 250), включающую в себя моторизованный механический привод (46, 48, 250), включающий в себя изолированный мотор (48, 250), причем основа расположена в изолированной зоне и выполнена с возможностью совмещения удлиненной платформы для размещения объекта с тоннелем, и ввода и вывода удлиненной платформы для размещения объекта из тоннеля.
2. Система загрузки объекта по п.1, в которой тоннель (20) является цилиндрическим или коническим и имеет поперечное сечение, выбранное из группы, содержащей круглое, эллиптическое, прямоугольное и квадратное поперечное сечение.
3. Система загрузки объекта по п.1, в которой тоннель (20) содержит по меньшей мере один материал из следующих: (i) немагнитный материал, совместимый с магнитно-резонансным сканированием; (ii) материал, по существу, прозрачный для рентгеновского излучения, генерируемого во время сканирования трансмиссионной компьютерной томографии или рентгеновского построения изображений, и (iii) материал, по существу, прозрачный для гамма лучей с энергией 511 кэВ, которые генерируются при аннигиляции электрон-позитронных пар.
4. Система загрузки объекта по п.1, в которой основа (34, 36, 44, 46, 48) выполнена с возможностью поддержки удлиненной платформы (40, 42) для размещения объекта, закрепленной одним концом на конце основы, ближнем к тоннелю (20), когда удлиненная платформа для размещения объекта по меньшей мере частично введена в тоннель.
5. Система загрузки объекта по п.1, в которой удлиненная платформа (40, 242) для размещения объекта опирается на нижнюю поверхность тоннеля (20), когда удлиненная платформа для размещения объекта по меньшей мере частично введена в тоннель.
6. Система загрузки объекта по п.1, в которой основа (34, 36, 44, 46, 48, 234, 250) включает в себя:
переднюю опорную стойку (34), прикрепленную к полу или платформе (44) в изолированной зоне (10) и подвижно взаимодействующую с удлиненной платформой (40, 42) для размещения объекта; и
заднюю опорную стойку (36), прикрепленную к концу удлиненной платформы для размещения объекта, удаленному от тоннеля (20), и подвижно взаимодействующую с полом или платформой в изолированной зоне.
7. Система загрузки объекта по п.6, которая дополнительно включает в себя:
резиновое ленточное уплотнение (64), по существу, изолирующее щель в крышке (60, 62) механического привода, вдоль которой перемещается задняя опорная стойка (34).
8. Система загрузки объекта по п.1, в которой удлиненная платформа (40, 42, 242) для размещения объекта включает в себя:
удлиненную промежуточную платформу (40), подвижно взаимодействующую с основой (34, 36, 44, 46, 48) для по меньшей мере частичного продвижения в тоннель (20); и
удлиненную верхнюю платформу (42), расположенную на удлиненной промежуточной платформе и подвижно взаимодействующую с удлиненной промежуточной платформой для продвижения в тоннель глубже, чем удлиненная промежуточная платформа.
9. Система загрузки объекта по п.8, в которой удлиненная промежуточная платформа (40) для размещения объекта включает в себя:
верхний моторизованный механический привод (50, 52) для продвижения удлиненной верхней платформы (42) глубже в тоннель (20), причем верхний моторизованный механический привод включает в себя герметично изолированный модульный мотор (52), выполненный с возможностью снятия с верхнего моторизованного механического привода в виде герметично изолированного блока.
10. Система загрузки объекта по п.9, в которой моторизованный механический привод (46, 48, 250), включающий в себя изолированный мотор (48, 250), основы (34, 36, 44, 46, 48), включает в себя:
нижний моторизованный механический привод (46, 48), включающий в себя герметично изолированный модульный мотор (48), выполненный с возможностью снятия с нижнего моторизованного механического привода в виде герметично изолированного блока.
11. Система загрузки объекта по п.10, в которой модульные моторы (48, 52) нижнего и верхнего моторизованных механических приводов (46, 50) являются взаимозаменяемыми.
12. Система загрузки объекта по п.10, в которой нижний моторизованный механический привод (46, 48) сблокирован таким образом, что удлиненная промежуточная платформа (40) не может быть выдвинута из тоннеля (20), если удлиненная верхняя платформа (42) не находится в отведенном назад положении.
13. Система загрузки объекта по п.8, которая дополнительно включает в себя:
элемент (56) зацепления, расположенный в тоннеле (20) для зацепления и остановки дальнейшего введения удлиненной промежуточной платформы (40) в тоннель.
14. Система загрузки объекта по п.13, в которой элемент (56) зацепления совмещен с опорой (58) тоннеля, расположенной снаружи изолированной зоны (10), так что тоннель поддерживает элемент зацепления в положении опоры тоннеля.
15. Система загрузки объекта по п.1, в которой изолированный мотор (48, 250) включает в себя герметично изолированный модульный мотор (48, 250), выполненный с возможностью снятия с моторизованного механического привода в виде герметично изолированного блока.
16. Система загрузки объекта по п.1, в которой удлиненная платформа (40, 42, 242) для размещения объекта и основа (34, 36, 44, 46, 48, 234, 250) устойчивы к обеззараживающим химическим веществам, применяемым при обеззараживании изолированной зоны (10).
17. Система загрузки объекта по п.1, которая дополнительно включает в себя:
подвижный контакт (32) между системой (18) диагностики и платформой или полом, поддерживающим систему диагностики за пределами изолированной зоны (10), причем подвижный контакт допускает линейное перемещение системы диагностики вдоль тоннеля (20) между рабочим положением и положением технического обслуживания.
18. Система загрузки объекта по п.1, в которой изолированный мотор (48, 250) является модульным мотором (48, 250), выполненным с возможностью снятия с основы в виде единого блока.
19. Система загрузки объекта по п.18, в которой основа (234) включает в себя щель (260), причем модульный мотор (250) снимается с основы в виде единого блока вдоль щели в направлении от системы (216) диагностики таким образом, чтобы переместить модульный мотор в общем от притягивающего магнитного поля, которое создает система диагностики.
20. Система загрузки объекта по п.18, в которой модульный мотор (48, 250) герметично изолирован для того, чтобы можно было осуществлять его обеззараживание в виде герметичного блока.
21. Предметный столик для объекта, содержащий:
платформу (40, 42) для размещения объекта;
переднюю опорную стойку (34), прикрепленную к полу или платформе (44) и подвижно взаимодействующую с платформой для размещения объекта;
заднюю опорную стойку (36), прикрепленную к платформе для размещения объекта и подвижно взаимодействующую с полом или платформой; и
моторизованный привод, включающий в себя мотор (46, 48), взаимодействующий с задней опорной стойкой для перемещения задней опорной стойки относительно передней опорной стойки таким образом, чтобы перемещать платформу для размещения объекта через переднюю опорную стойку.
22. Предметный столик по п.21, в котором моторизованный привод (46, 48) расположен на или внутри пола или платформы.
23. Предметный столик по п.21, в котором моторизованный привод, включающий в себя мотор (46, 48), включает в себя:
модульный мотор (48), выполненный с возможностью снятия с моторизованного привода в виде единого блока.
24. Предметный столик по п.22, в котором моторизованный привод (46, 48) включает в себя:
герметично изолированный модульный мотор (48), выполненный с возможностью снятия с моторизованного привода в виде герметично изолированного блока.
25. Предметный столик по п.21, который дополнительно включает в себя:
резиновое ленточное уплотнение (64), по существу, изолирующее щель в крышке (60, 62) моторизованного привода, накрывающей моторизованный привод (46, 48), причем задняя опорная стойка (36) перемещается вдоль щели.
26. Предметный столик по п.21, в котором платформа (40, 42) для размещения объекта включает в себя:
промежуточную платформу (40), подвижно взаимодействующую с передней опорной стойкой (34) и прикрепленную к задней опорной стойке (36); и
верхнюю платформу (42), размещенную на промежуточной платформе и подвижно взаимодействующую с ней.
27. Предметный столик для объекта для ввода и вывода объекта из магнитно-резонансного (MR) сканера (216), причем предметный столик содержит:
основу (234);
верхнюю поверхность (242) столика, по меньшей мере частично расположенную на основе; и
изолированный модульный мотор (250), расположенный на основе или внутри ее для перемещения верхней поверхности столика по основе, причем основа и изолированный модульный мотор скомпонованы таким образом, что изолированный модульный мотор снимается только путем перемещения изолированного модульного мотора в направлении в общем от магнитно-резонансного сканера.
28. Предметный столик по п.27, в котором основа (234) включает в себя щель (260), обеспечивающую доступ для снятия изолированного модульного мотора (250) путем перемещения изолированного модульного мотора в направлении в общем от магнитно-резонансного сканера (216).
29. Предметный столик по п.27, который дополнительно включает в себя:
быстроразъемное соединение (270, 272), соединяющее изолированный модульный мотор (250) и основу (234) таким образом, что соединение может быть разомкнуто путем перемещения изолированного модульного мотора (250) в направлении в общем от магнитно-резонансного сканера (216).
30. Предметный столик для объекта для использования в изолированной зоне (10), причем предметный столик содержит:
удлиненную платформу (40, 42, 242) для размещения объекта, расположенную в изолированной зоне;
основу (34, 36, 44, 234), расположенную в изолированной зоне и выполненную с возможностью поддержки удлиненной платформы для размещения объекта; и
моторизованный привод (46, 48, 250), установленный с основой и выполненный с возможностью перемещения удлиненной платформы для размещения объекта, чтобы выдвинуть конец удлиненной платформы для размещения объекта в направлении соответствующего устройства (16, 18, 216), причем моторизованный привод включает в себя модульный мотор (48, 250), выполненный с возможностью съемной установки на основе в виде модуля.
31. Предметный столик по п.30, в котором модульный мотор (48, 250) герметично изолирован.
32. Предметный столик по п.30, в котором основа включает в себя:
фиксированную опорную часть (34); и
подвижную опорную часть (36), прикрепленную к удлиненной платформе (40, 42) для размещения объекта, причем моторизованный привод (46, 48) соединен с подвижной опорной частью для перемещения удлиненной платформы для размещения объекта через фиксированную опорную часть.
33. Предметный столик по п.30, в котором удлиненная платформа для размещения объекта включает в себя: промежуточную платформу (40), расположенную на основе (34, 36, 44) и соединенную с моторизованным приводом (46, 48) для перемещения промежуточной платформы для выдвижения конца промежуточной платформы в направлении соответствующего устройства (16, 18);
верхнюю платформу (42), расположенную на промежуточной платформе; и
верхний моторизованный привод (50, 52), установленный с промежуточной платформой и выполненный с возможностью перемещения верхней платформы для выдвижения конца верхней платформы в направлении соответствующего устройства, причем верхний моторизованный привод включает в себя верхний модульный мотор (52), выполненный с возможностью съемной установки на промежуточной платформе в виде модуля.
34. Предметный столик по п.33, в котором упомянутый модульный мотор и верхний модульный мотор являются взаимозаменяемыми.
| DE 19639975 C1, 07.05.1998 | |||
| US 6955464 B1, 18.10.2005 | |||
| Стол пациента ядерного магниторезонансного томографа | 1990 |
|
SU1809756A3 |
| RU 2001105570 A, 20.01.2003 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| EP 0761166 A2, 12.03.1997 | |||
| Балки коробчатого сечения с диагональными распорными плоскостями | 1931 |
|
SU26919A1 |

