Область техники, к которой относится изобретение
Изобретение относится к лабораторному оборудованию для проведения микробиологических исследований, а именно к модулям для формирования цифровых изображений биологических образцов, позволяющим проводить исследование микроорганизмов и клеточных структур, размещенных в контейнерах, например, в чашках Петри, по цифровым изображениям результатов посева, включая регистрацию роста колоний в режиме реального времени, идентификацию микробного агента в образце, определение его резистентности к антибактериальным препаратам и т.д.
Модули фотографирования могут быть использованы в качестве самостоятельных устройств, а также в составе камеры инкубации биологических образцов, которые в свою очередь могут входить в состав автоматизированной микробиологической лаборатории или любой другой системы со встроенной функцией фотографирования биологических образцов.
Уровень техники
В настоящее время наблюдается активное развитие микробиологической отрасли, одной из задач которой является внедрение автоматизированных систем и оборудования для инкубации микроорганизмов и клеточных структур и проведения микробиологических исследований. С ростом количества проводимых микробиологических исследований актуальным является разработка высокопроизводительных устройств, повышение скорости проведения исследования при обеспечении высокого качества получаемого результата, в том числе и за счет исключения ошибок, вызванных человеческим фактором. Одна из задач автоматизации микробиологических исследований связана с разработкой модулей формирования цифровых изображений биологических образцов, которые, как правило, встроены или совмещены с камерой инкубации биологических образцов, обеспечивая в замкнутом объеме процесс инкубации биологических образцов и формирование их цифровых изображений в процессе инкубирования для последующего исследования.
Формирование цифровых изображений биологических образцов осуществляется в модуле фотографирования, который как правило содержит цифровой оптический блок и блок перемещения контейнеров с биологическими образцами. Блок перемещения контейнеров может иметь различное конструктивное исполнение в зависимости от заданной траектории перемещения контейнеров в цифровой оптический блок, при этом актуальной задачей является оптимизация данного маршрута с целью повышения пропускной способностью модуля, а следовательно повышения его производительности. Необходимость периодического контроля процесса роста культур обусловлена актуальностью проблемы выявления роста микроорганизмов на ранних этапах в течение инкубационного периода, при этом периодичность контроля может составлять от 1 раза в 3 часа до 1 раза в час. Однако не все известные камеры инкубации с модулями фотографирования обладают такой возможностью. Решение данной задачи усложняется при увеличении загрузочного объема камеры инкубации до 300 контейнеров и более с периодичностью получения изображения каждого образца не менее 1 раза в час.
Из уровня техники известен модуль фотографирования, входящий в состав системы предварительной обработки образца (WO 2021212384 A1). Указанный модуль фотографирования включает в себя устройство перемещения образца и устройство формирования изображения. Устройство формирования изображения представляет собой фотографирующее устройство. Устройство перемещения образцов оснащено приводом с винтовой передачей, перемещающим контейнеры с образцами по направляющим. Однако такое конструктивное выполнение устройства перемещения увеличивает потери на трение в подвижных частях, что снижает степень надежности и быстродействие модуля фотографирования в целом.
Также известен модуль формирования цифрового изображения биологического образца, встроенный в состав устройства для хранения и обработки чашек Петри (US 9028752 B2). Устройство для хранения и обработки чашек Петри имеет в том числе камеру инкубации, устройство для фотографирования биологических образцов, передаточное устройство, а также передаточную станцию и погрузочно-разгрузочное устройство. Устройство для фотографирования представляет собой оптическое устройство с камерой, обеспечивающее формирование изображения образца, передаточное устройство и передаточная станция в совокупности с устройством фотографирования образуют модуль формирования цифрового изображения образца. В работе модуля формирования цифрового изображения задействованы средства перемещения, выполненные в виде лифтов. При этом конструктивное выполнение данных лифтов позволяет им лишь перемещать образцы по вертикали, существенно ограничивая тем самым их функциональность. Кроме того, недостатком рассматриваемого устройства является то, что работа с каждым образцом в нем ведется последовательно, исключая возможность приема для фотографирования второго образца, пока осуществляется перемещение и фотографирование в модуле первого образца, что существенно увеличивает время проведения микробиологического исследования образцов.
Ближайшим аналогом по отношению к заявляемому техническому решению является модуль фотографирования (или модуль формирования цифрового изображения), представленный в составе системы для инкубации биологических культур (US 11041871 B2). Система содержит, инкубационную камеру и размещенные в ней трехкоординатный манипулятор, модуль захвата изображений (или модуль фотографирования), загрузочную станцию. Модуль захвата изображений выполнен с возможностью формирования цифрового изображения биологических образцов. Данный модуль содержит цифровой оптический блок, расположенный в отдельном корпусе, сообщающимся с рабочим объемом камеры инкубации, и средство перемещения контейнера в цифровой оптический блок, выполненное в виде платформы для подачи контейнеров в упомянутый блок, расположенной в рабочем объеме камеры инкубации. При этом в данном модуле платформа для подачи контейнеров выполнена неподвижной. На указанной платформе расположен поворотный диск с двумя ячейками (гнездами) для размещения контейнеров. Система для инкубации также снабжена средством перемещения контейнера в вертикальном направлении, расположенным на входе в модуль захвата изображения, выполненным в виде лифта с возможностью перемещения контейнера на транспортер, и средством перемещения контейнера в горизонтальном направлении, выполненным с возможностью перемещения контейнера из рабочей зоны камеры инкубации в зону формирования цифрового изображения и обратно. В модуле формирования цифрового изображения контейнер перемещается в горизонтальной плоскости. Трехкоординатный манипулятор устанавливает контейнер с образцом на платформу, после чего контейнер по транспортеру направляется к поворотному диску. Поворотный диск, поворачиваясь на 90 градусов, помещает образец в зону фотографирования под объектив камеры, после чего, вновь осуществив поворот на 90 градусов, передает контейнер на транспортер для возврата в камеру инкубации.
Однако описанный в патенте US 11041871 B2 модуль формирования цифрового изображения не обеспечивает подачу и транспортировку второго контейнера, пока после фотографирования из него не будет извлечен первый контейнер. В то время, когда поворотный диск развернут к объективу камеры, ячейки поворотного диска расположены таким образом, что диск не может принять следующий контейнер с образцом, в результате чего работа с образцами ведется последовательно.
Таким образом, конструктивные решения аналогов и прототипа не позволяют существенно повысить производительность модуля фотографирования, а также снизить время проводимого исследования при высоком потоке инкубируемых образцов. В этой связи существует потребность в разработке устройств, обеспечивающих возможность мониторинга инкубируемых культур в процессе культивирования с автоматическим цифровым формированием изображений с высоким разрешением и с заданной периодичностью.
Технической проблемой, решение которой обеспечивается настоящим изобретением, является разработка высокопроизводительного автоматизированного модуля формирования цифровых изображений биологических образцов, устраняющего недостатки аналогов и прототипа, способного обеспечить многократное фотографирование образцов на этапе инкубации.
Раскрытие сущности изобретения
Технический результат, обеспечиваемый изобретением при решении вышеуказанной технической проблемы, заключается в повышении производительности модуля формирования цифровых изображений биологических образцов (или модуля фотографирования), помещенных в контейнеры, например, в чашки Петри, за счет оптимизации траектории перемещения контейнеров в данном модуле с обеспечением возможности приема второго контейнера с образцом и его перемещения в буферную зону во время фотографирования образца из первого контейнера.
Технический результат достигается при использовании в камере инкубации биологических образцов модуля формирования цифровых изображений, содержащего цифровой оптический блок и блок перемещения контейнеров с биологическими образцами, включающий средство углового перемещения контейнера в горизонтальной плоскости, выполненное в виде размещенного на неподвижной платформе поворотного диска с двумя ячейками для размещения контейнеров.
Отличительными особенностями данного модуля являются:
выполнение блока перемещения контейнеров, по меньшей мере с двумя средствами перемещения контейнеров в вертикальном направлении, выполненными в виде лифта с площадками для размещения контейнеров, и средством перемещения контейнера в горизонтальном направлении, при этом одно из средств перемещения контейнеров в вертикальном направлении выполнено с возможностью перемещения контейнера из верхнего положения над уровнем поворотного диска в нижнее положение на уровне платформы с размещением контейнера в одной из ячеек поворотного диска, являющейся приемной ячейкой, и обратно; второе средство перемещения контейнеров в вертикальном направлении выполнено с возможностью перемещения контейнера из данной ячейки поворотного диска после ее углового перемещения, на уровень, ниже уровня неподвижной платформы, и обратно; а средство перемещения контейнера в горизонтальном направлении выполнено с возможностью транспортировки контейнера в цифровой оптический блок для фотографирования.
В одном из вариантов осуществления изобретения поворотный диск выполнен с возможностью поворота ячеек на 180 градусов; где ячейки поворотного диска могут иметь идентичную конфигурацию и выполнены с расположением их центров на одной диаметральной оси диска.
Неподвижная платформа снабжена сквозными отверстиями, сконфигурированными с возможностью перемещения через них площадок лифтов, при этом отверстия расположены под ячейками поворотного диска в проекции упомянутых площадок лифтов.
Средство перемещения контейнеров в вертикальном направлении может иметь различное конструктивное исполнение. В одном из вариантов реализации данное средство содержит кронштейн, на котором размещена площадка для размещения контейнера, снабженная датчиком наличия контейнера на лифте, направляющие (вертикально ориентированные), подъемный механизм в виде шагового электродвигателя, снабженного ременной передачей для перемещения кронштейна по направляющим, датчики верхнего и нижнего положения контейнера на лифте (концевые выключатели). В другом варианте реализации средство перемещения контейнеров в вертикальном направлении содержит кронштейн, снабженный поворотным столиком для размещения контейнера с датчиком наличия контейнера, направляющие (вертикально ориентированные), подъемный механизм в виде шагового электродвигателя, снабженного ременной передачей для перемещения кронштейна по направляющим, механизм вращения поворотного столика, выполненный в виде шагового электродвигателя, размещенного в своем цилиндрическом корпусе, который закреплен на кронштейне под поворотным столиком, датчики верхнего и нижнего положения контейнера на лифте (концевые выключатели).
При использовании контейнеров в виде чашек Петри ячейки поворотного диска имеют диаметр больше диаметра чашки, но меньше диаметра ее крышки и выполнены с опорными поверхностями для крышки, обеспечивающими возможность перемещения в зону фотографирования чашек без крышки.
Средство перемещения контейнера в горизонтальном направлении также может иметь различное конструктивное исполнение. В одном из вариантов реализации данное средство содержит горизонтально ориентированные направляющие рельсы и транспортировочную корзину, выполненную с возможностью перемещения по направляющим рельсам. Транспортировочная корзина снабжена кареткой, подвижно закрепленной на направляющих рельсах. При этом транспортировочная корзина может быть выполнена в виде опорного кольца, консольно закрепленного на каретке.
Средство перемещения контейнера в горизонтальном направлении может быть снабжено шторкой, выполненной с возможностью возвратно-поступательного перемещения в горизонтальном направлении и размещения в зоне фотографирования под транспортировочной корзиной с возможностью перекрытия светового потока от нижних светильников. Для перемещения шторки средство перемещения контейнера в горизонтальном направлении может быть снабжено отдельными горизонтально ориентированными направляющими рельсами.
Предпочтительным является выполнение всех средств перемещения с датчиками положения контейнера.
Технический результат достигается также при использовании в камере инкубации биологических образцов системы из двух модулей формирования цифровых изображений биологических образцов, один из которых расположен над входным окном камеры инкубации, второй - под входным окном камеры инкубации, при этом входное окно выполнено в передней стенке камеры инкубации в ее центральной части.
Модули формирования цифровых изображений предпочтительно расположены на равноудаленном по высоте расстоянии от входного окна камеры инкубации, а цифровые оптические блоки, расположены в отдельных корпусах, выполненных сообщающимся с рабочим объемом камеры инкубации.
В конструкции модуля формирования цифрового изображения использован усовершенствованный блок перемещения контейнеров, содержащий четыре средства перемещения контейнеров (два из которых выполнены в виде лифтов с обеспечением возвратно-поступательного перемещения контейнеров в вертикальном направлении, одно - в горизонтальном направлении, одно в виде поворотного диска, реализующего угловое перемещение контейнеров в горизонтальной плоскости), при этом перечисленные средства перемещения расположены в определенной последовательности и имеют пространственную ориентацию, позволяющую сформировать оптимальную траекторию перемещения контейнеров от зоны приема в зону фотографирования и обратно, а также обеспечить прием образца в буферную зону в то время, как предыдущий образец еще находится на фотографировании, увеличивая, тем самым, пропускную способность модуля. Использование в конструкции камеры инкубации системы из двух модулей фотографирования позволяет еще больше повысить производительность системы инкубации и исследования биологических образцов, а также надежность работы системы за счет снижения риска прерывания ее работы из-за технических неполадок, связанных с прекращением функционирования одного из модулей фотографирования. Второй модуль фотографирования в таких ситуациях может выступать в качестве резервного для обеспечения бесперебойной работы системы.
Заявленное устройство является надежным, эргономичным, удобным в использовании и обслуживании, позволяет фотографировать и исследовать по сравнению с аналогами большее количество образцов в единицу времени, снижает вероятность ошибок оператора, которые могут привести к неправильной постановке диагноза, поздней диагностике, потере или порче образцов. Такие ошибки потенциально могут негативно сказываться на качестве диагностики и эффективности лечения пациентов.
Кроме того, заявленный модуль может легко интегрироваться в автоматизированную лабораторную среду и входить в комплекс (систему) взаимосвязанных модулей по автоматизации большей части процессов микробиологических исследований.
Краткое описание чертежей
Изобретение поясняется иллюстративным материалом, где
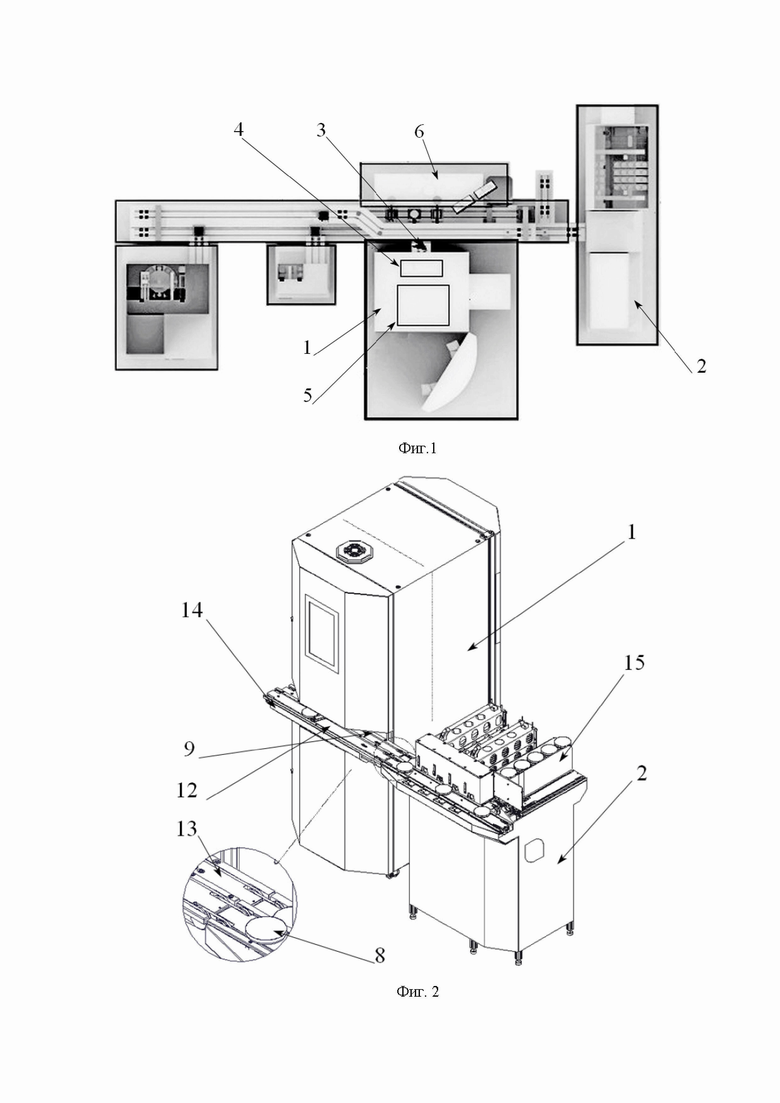
на фигуре 1 схематично показан пример использования заявленного модуля формирования цифровых изображений биологических образцов (далее модуль фотографирования) в автоматизированной микробиологической лаборатории, где помимо упомянутого модуля, встроенного в камеру инкубации, лаборатория также содержит модуль посева биоматериала в контейнеры, конвейерную систему, модуль загрузки и выгрузки контейнеров из камеры инкубации, рабочее место лаборанта с ПК для проведения исследований биологических образцов;
на фигуре 2 представлена камера инкубации с модулем загрузки и выгрузки контейнеров с образцами, в которую установлен модуль фотографирования, общий вид со стороны передней стенки; показана внешняя конфигурация камеры инкубации и взаиморасположение камеры инкубации и модуля загрузки и выгрузки контейнеров с образцами (блока модуля, расположенного за пределами камеры инкубации);
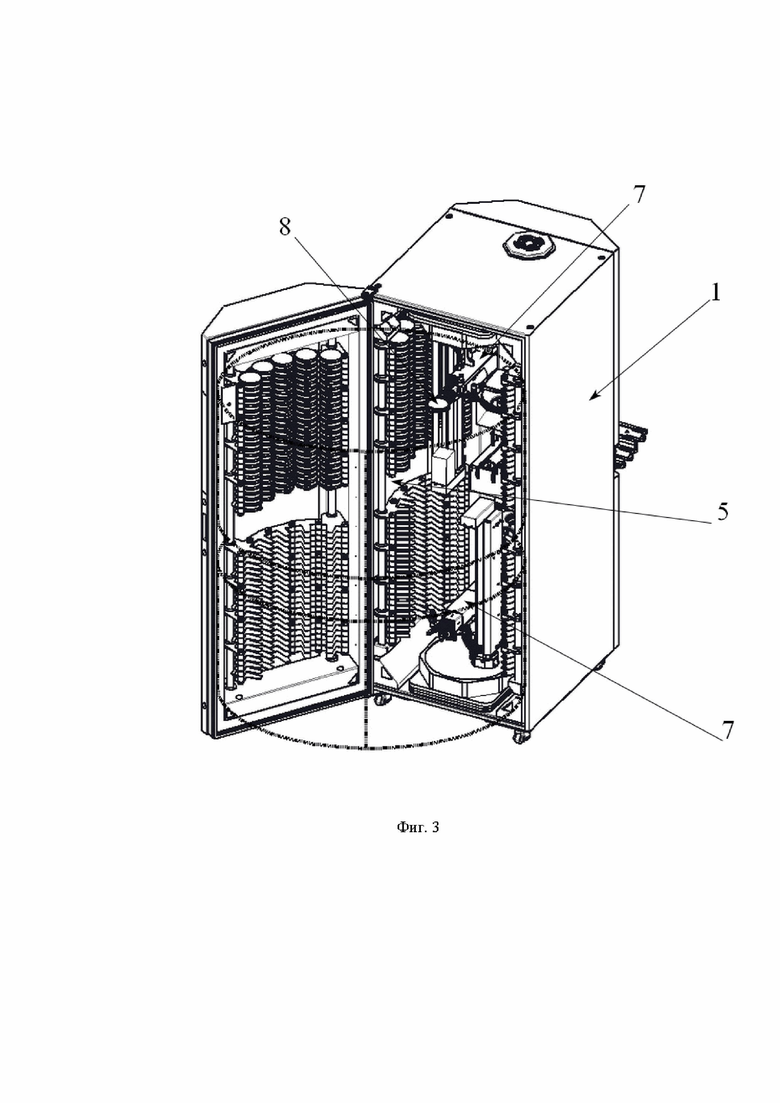
на фигуре 3 представлена камера инкубации с расположенными в ней двумя модулями фотографирования - вид изнутри, со стороны задней стенки с дверцей; показано внутреннее устройство камеры инкубации, включая расположенные на ее боковых стенках и задней стенке с дверцей полки с ячейками (гнездами) для размещения контейнеров, сгруппированные в секции - верхние и нижние, а также представлен рабочий объем камеры инкубации и находящиеся в нем два 3-х координатных манипулятора - верхний и нижний (предназначенные для обслуживания верхнего и нижнего модулей фотографирования, соответственно);
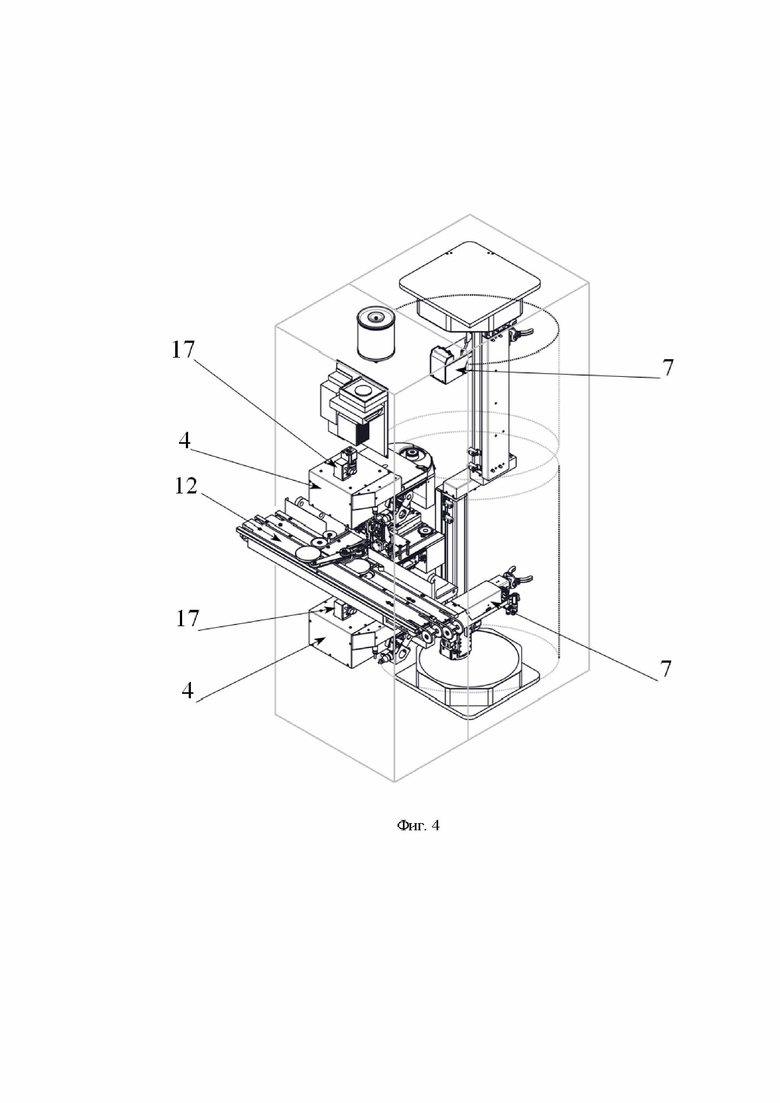
на фигуре 4 представлен вариант размещения модулей фотографирования в камере инкубации относительно других модулей и блоков, общий вид со стороны передней стенки с условно обозначенными стенками камеры; показаны модуль загрузки и выгрузки контейнеров с образцами (с внутренним блоком и транспортерами для загрузки и выгрузки контейнеров внешнего блока), находящиеся внутри камеры инкубации модули фотографирования и модуль перемещения контейнеров в рабочем объеме камеры;
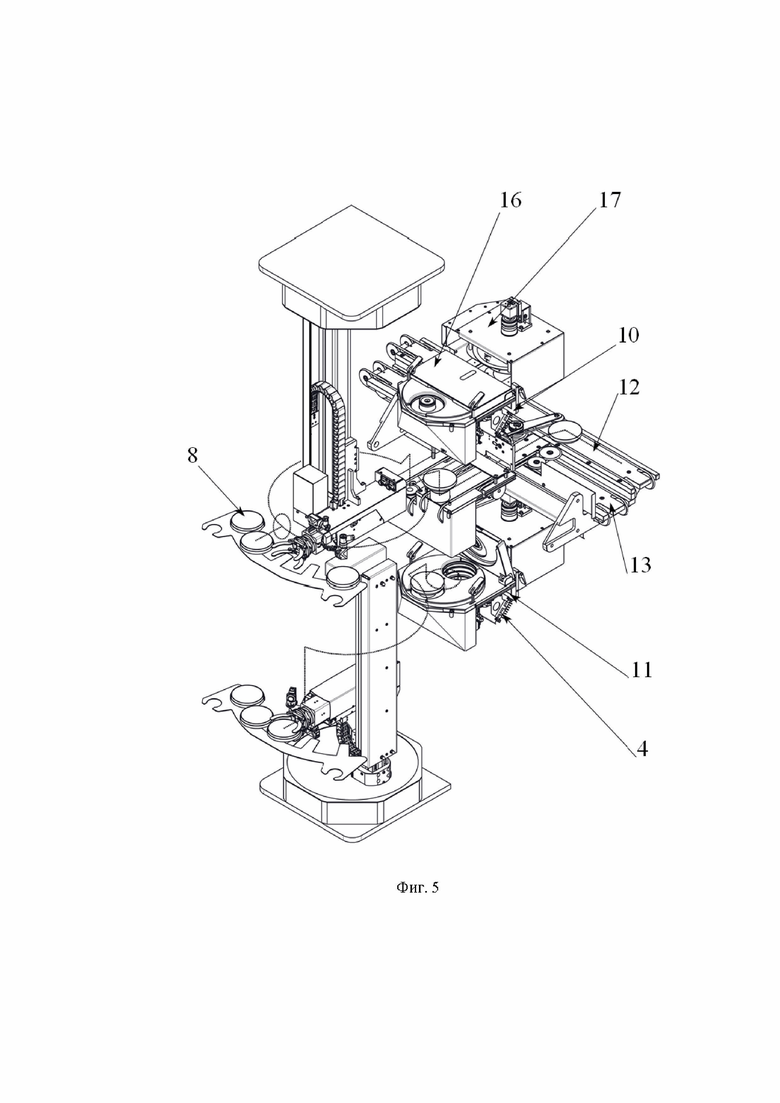
на фигуре 5 представлен вариант размещения модулей фотографирования в камере инкубации относительно двух 3-х координатных манипуляторов, общий вид со стороны задней стенки с дверцей вне корпуса камеры; показано взаимное расположение устройств, отражена конструктивная связь элементов, а также схема перемещения контейнера с образцом;
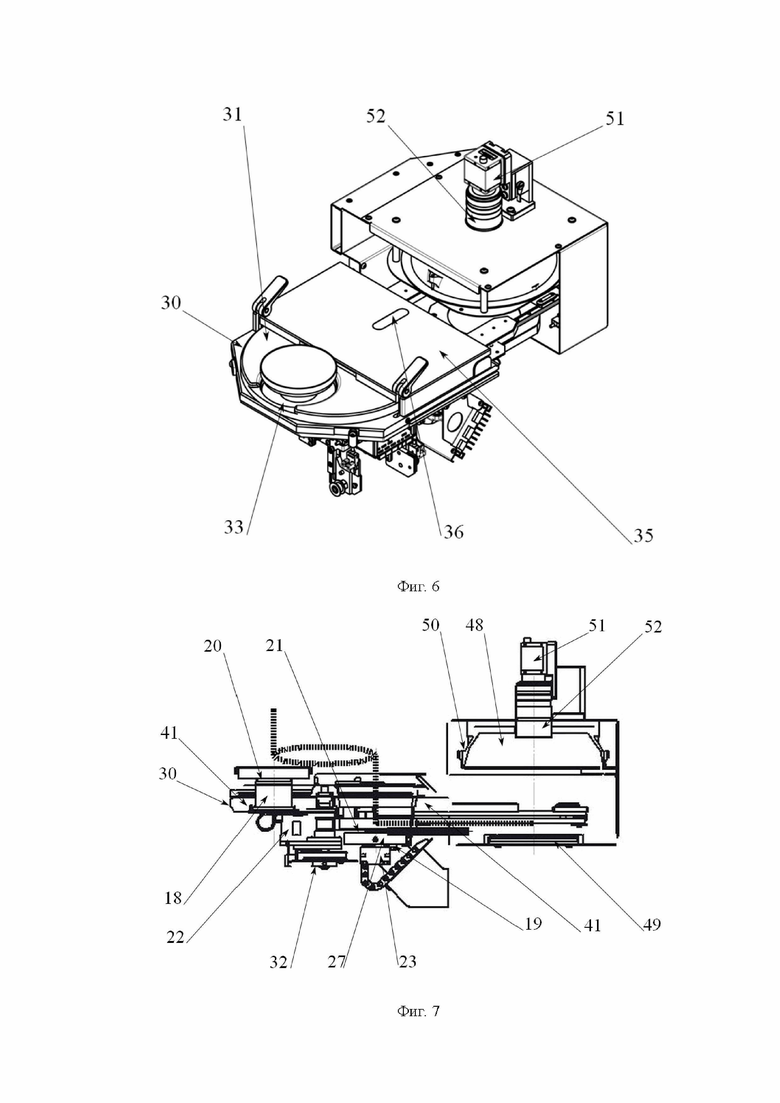
на фигурах 6, 7 представлен модуль фотографирования образцов, общий вид, вид сбоку, соответственно;
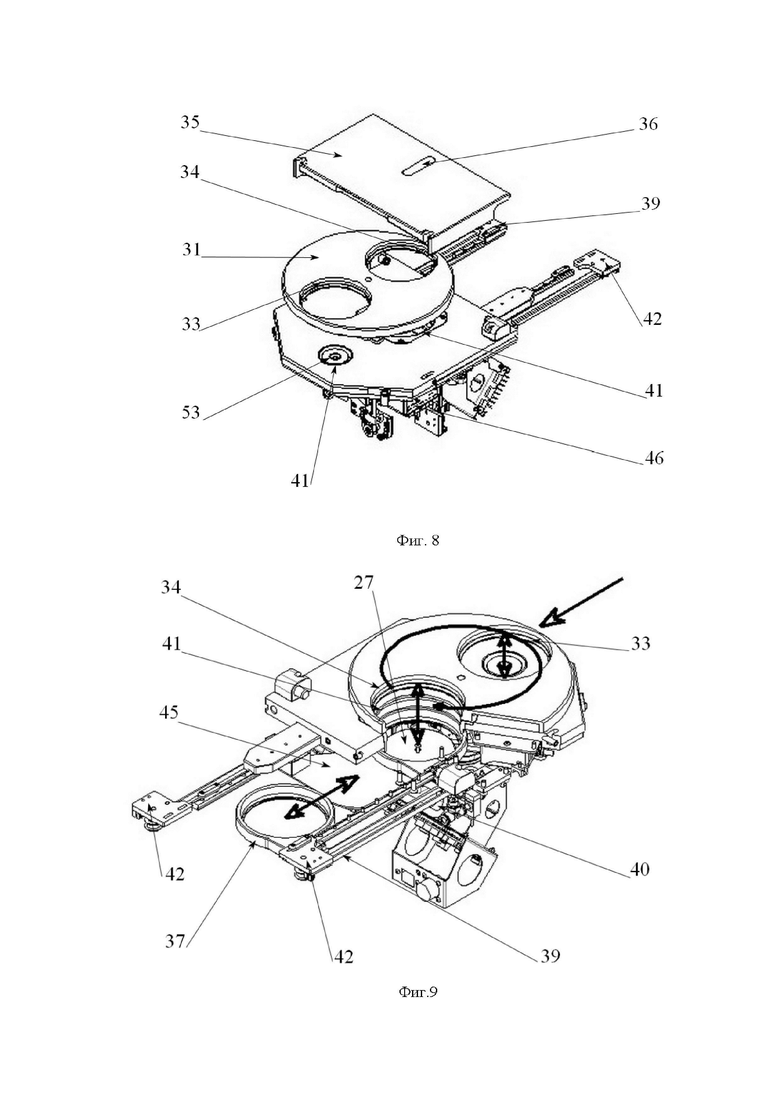
на фигурах 8, 9 представлен блок (узел) перемещения контейнеров модуля фотографирования, вид спереди, вид сзади, соответственно;
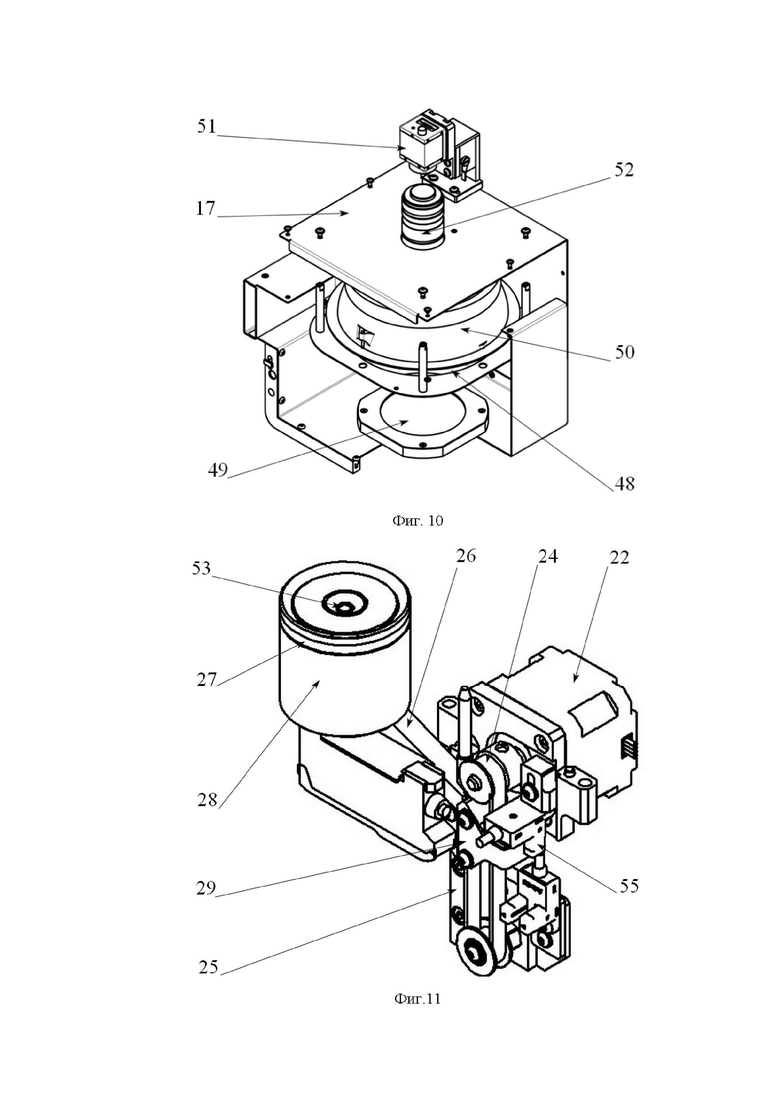
на фигуре 10 представлен блок (узел) формирования цифрового изображения (цифровой оптический блок) модуля фотографирования;
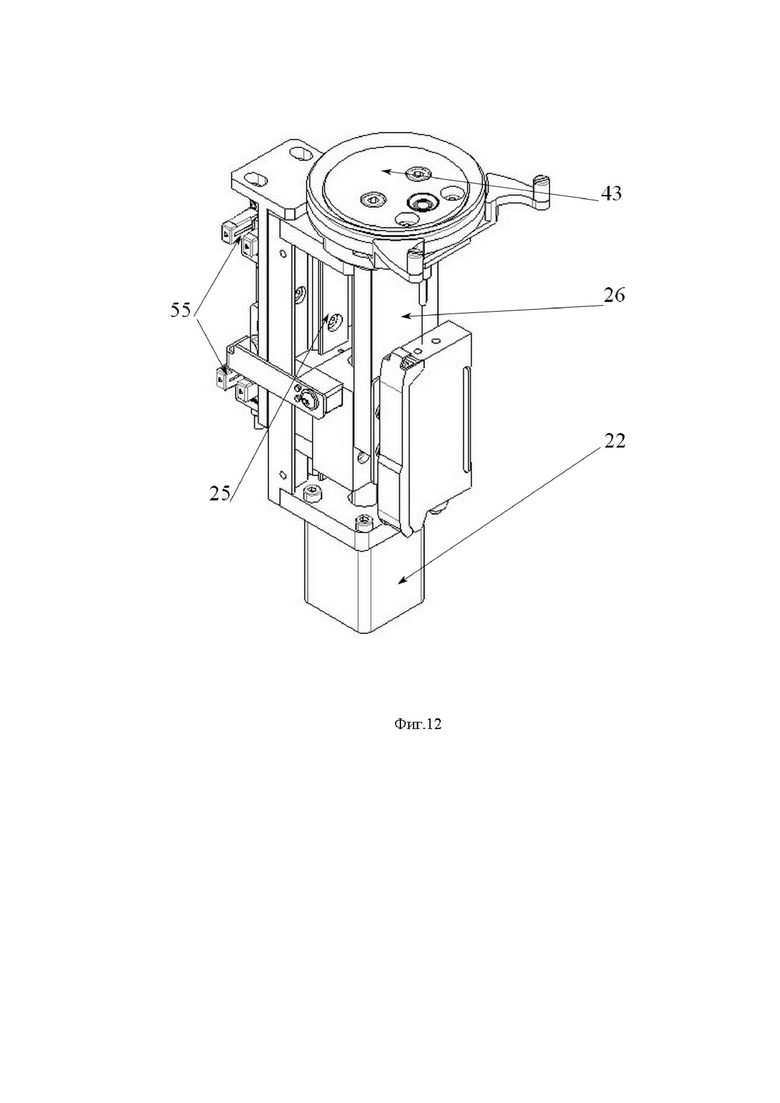
на фигурах 11 и 12 представлены варианты реализации средства перемещения контейнеров в вертикальном направлении, выполненные в виде лифтов;
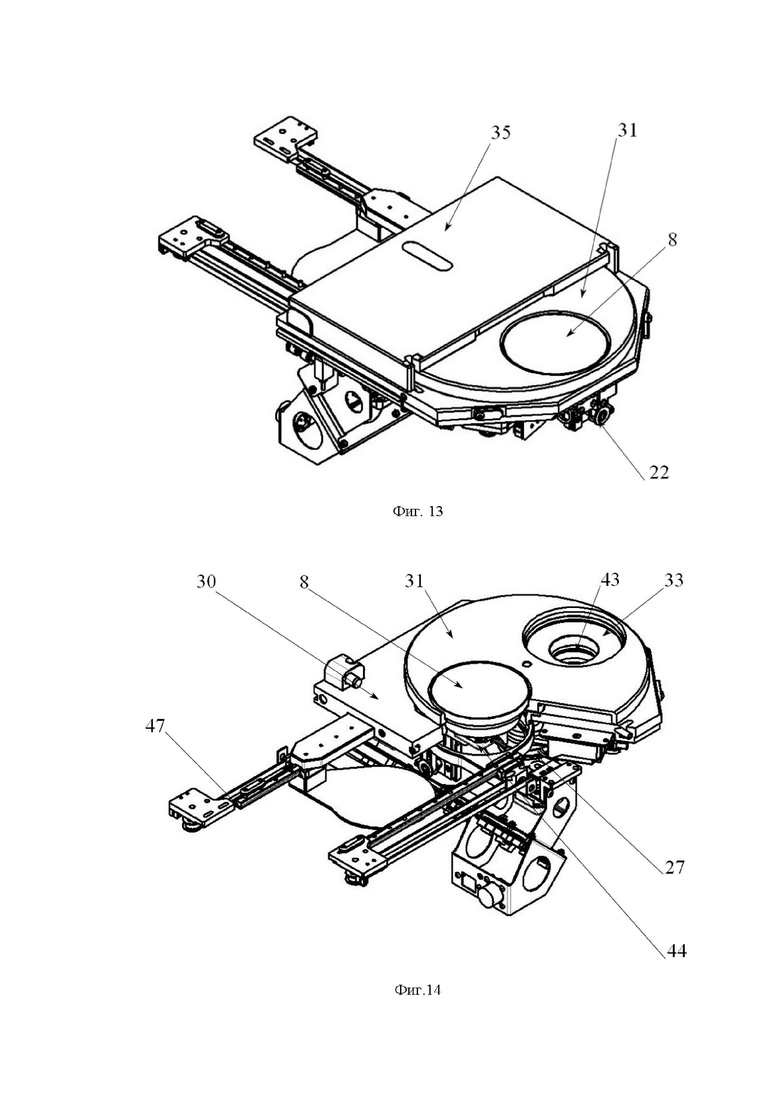
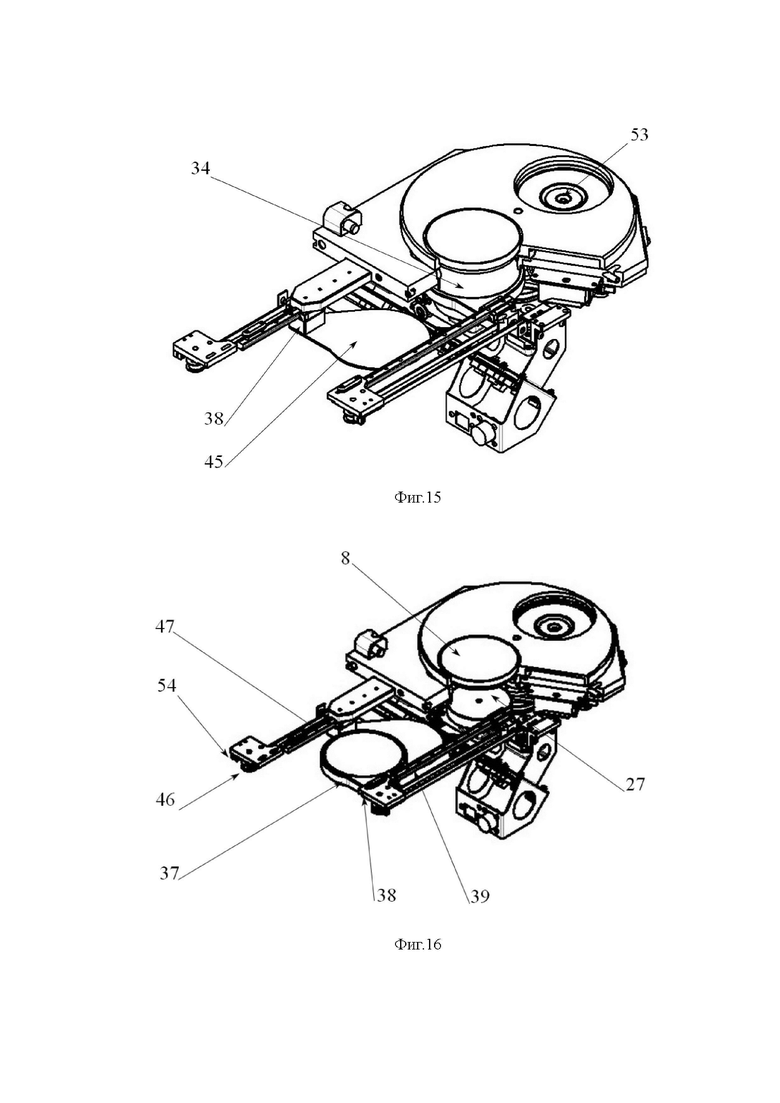
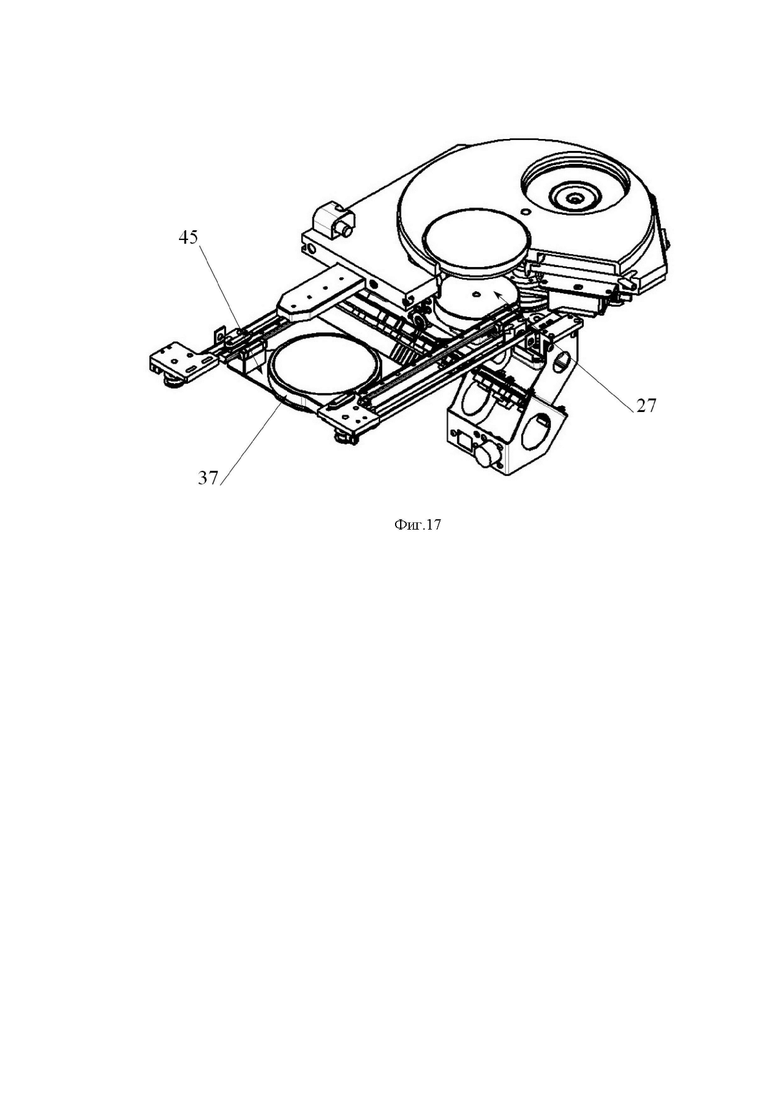
на фигурах 13 - 17 представлен блок перемещения контейнеров с биологическими образцами модуля фотографирования с различным положением контейнеров, где на фигуре 13 контейнер размещен в приемной ячейке, на фигуре 14 - в ячейке передачи на фотографирование (или промежуточной, или буферной ячейке), на фигуре 15 - в транспортировочной корзине, на фигуре 16 - у объектива (в зоне фотографирования), на фигуре 17 - у объектива (в зоне фотографирования) с размещенной под контейнером шторкой.
Позициями на чертежах обозначены следующие блоки и модули демонстрирующие различные варианты выполнения и использования заявленного модуля фотографирования в камере инкубации и системе для инкубации и формирования цифровых изображений биологических образцов: 1 - камера инкубации, 2 - модуль загрузки и выгрузки контейнеров с образцами, 3 - модуль идентификации образца (модуль сканирования), 4 - модуль формирования цифрового изображения образцов (модуль фотографирования), 5 - модуль перемещения контейнеров в рабочем объеме камеры, 6 - блок управления, 7 - 3-х координатный манипулятор, 8 - контейнер с биологическим образцом, 9 - окно для загрузки и выгрузки контейнеров, 10 - верхнее окно камеры инкубации для связи с модулем 4, 11 - нижнее окно камеры инкубации для связи с модулем 4, 12 - транспортер загрузки контейнеров в камеру инкубации, 13 - транспортер выгрузки контейнеров из камеры инкубации, 14 - внешний блок модуля 2 загрузки и выгрузки контейнеров 8, 15 - лоток загрузки контейнеров, 16 - блок (или узел) перемещения контейнера 8, 17 - блок (или узел) формирования цифрового изображения (цифровой оптический блок), 18 - первый (приемный) лифт модуля фотографирования, 19 - второй лифт модуля фотографирования, 20 - площадка первого лифта, 21 - площадка второго лифта, 22 - электродвигатель первого лифта, 23 - электродвигатель второго лифта, 24 - ременная передача, 25 - вертикально ориентированная направляющая, 26 - кронштейн лифта, 27 - поворотный столик лифта для контейнера, 28 - корпус двигателя поворотного столика для контейнера, 29 - флажок, 30 - опорная платформа, 31 - поворотный диск, 32 - электродвигатель, 33 - входная (или приемная) ячейка (гнездо), 34 - ячейка (гнездо) передачи контейнера на фотографирование (промежуточная или буферная ячейка), 35 - откидная крышка узла перемещения, 36 - канал откидной крышки, 37 - транспортировочная корзина, 38 - каретка, 39 - направляющие рельсы транспортировочной корзины, 40 - привод транспортировочной корзины (электродвигатель с ременной передачей), 41 - отверстия в опорной платформе, 42 - площадка ка для установки концевого датчика на направляющих рельсах, 43 - столик лифта, 44 - привод вращения столика, 45 - шторка, 46 - привод шторки (электродвигатель с ременной передачей), 47 - направляющие рельсы шторки, 48 - верхний светильник цифрового оптического блока, 49 - нижний светильник цифрового оптического блока, 50 - рассеиватель, 51 - цифровая фотокамера, 52 - объектив фотокамеры, 53 - датчик наличия контейнера, 54 - датчик положения шторки, 55 - датчик верхнего и нижнего положения контейнера (концевые выключатели).
Осуществление изобретения
Далее представлено более подробное описание заявляемого изобретения.
В настоящем описании использованы следующие термины, определения и сокращения.
«Система для инкубации и формирования цифровых изображений биологических образцов» при описании заявленного изобретения может иметь сокращенное название - система, система для инкубации, система инкубации, автоматизированная система.
«Контейнер» - емкость, в которой возможно размещение исследуемого образца, в том числе посредством ручной и/или автоматической инокуляции. Емкость, в которую может быть помещен образец, обычно содержит субстрат или среду с питательными веществами для роста целевых микроорганизмов. Согласно настоящему изобретению, в автоматизированной системе для проведения исследований могут быть использованы такие контейнеры, как чашки Петри (далее также - чашки), содержащие высеянную среду, пробирки с бульоном и предметные стекла с биологическими образцами и др.
«Биологический образец» (далее также - образец) - образец жидкости и/или ткани организма человека, а также любой другой материальный образец, потенциально содержащий микробиологические объекты, взятый для проведения лабораторного исследования.
Термином «зона» при описании заявленного изобретения обозначена определенная область пространства, в которой реализуется предписанная функция устройства, модуля, блока, или их частей или отдельных конструктивных элементов, которая может иметь материальные или условные границы.
«Красная зона» - область пространства в камере инкубации, в которой возможно столкновение (соударение) манипуляторов.
«Рабочий объем камеры инкубации» или «Рабочая зона камеры инкубации» - объем в камере инкубации, в котором осуществляется инкубирование образцов и непосредственная работа находящихся в ней устройств, модулей и их частей.
Предлагаемый модуль фотографирования может быть встроен в камеру инкубации, обеспечивающей возможность инкубирования контейнеров с образцами в оптимальных условиях и формирования цифровых изображений образцов в режиме реального времени с заданной (или необходимой) периодичностью (например, каждые 60 минут) с последующим анализом врачом или лаборантом полученных изображений, в т.ч. с использованием соответствующего программного обеспечения. Программное обеспечение может содержать алгоритмы, основанные на использовании искусственного интеллекта. Камера инкубации с одним или двумя модулями фотографирования может быть интегрирована в структуру микробиологической лаборатории (фиг. 1), в которой могут присутствовать модули и/или блоки автоматического посева биоматериала в контейнеры, например, такие как чашки Петри, с функцией загрузки контейнеров в кассеты, маркировки контейнеров; подготовки образцов для микрофлюидных тестов; отбора колоний; определения резистентности к антибиотикам и т.д.
Система для инкубации и формирования цифровых изображений биологических образцов (фиг. 1), на примере которой продемонстрирована работа заявленного модуля фотографирования, содержит:
- камеру 1 инкубации образцов, размещенных в контейнерах (далее также - камера инкубации, камера),
- модуль 2 загрузки и выгрузки контейнеров с образцами,
- модуль 3 идентификации образца с использованием датчиков и сканеров, для контроля местоположения и идентификации конкретной чашки Петри (далее также - модуль идентификации, модуль сканирования),
- два модуля 4 формирования цифровых изображений образцов (далее также - модуль фотографирования),
- модуль 5 перемещения контейнеров в рабочем объеме камеры, включающий два 3-х координатных манипулятора 7 для перемещения контейнеров 8 с образцами в модуль фотографирования 4 и их обратной загрузки в камеру инкубации 1,
- блок управления 6 с функцией управления перемещениями 3-х координатных манипуляторов 7 (далее также - блок управления).
Далее представлено подробное описание модуля фотографирования, размещенного в камере инкубации автоматизированной системы, где в качестве контейнеров 8 использованы чашки Петри.
Камера инкубации 1 (фиг. 2 - 4) представляет собой корпус по типу шкафа. Камера может содержать металлический каркас, облицованный с внешней и внутренних сторон. В рабочем объеме камеры расположены полки с ячейками (гнездами) для размещения чашек Петри с биологическими образцами, как показано, например, на фиг. 3. В камере размещены инженерные системы для создания в ее рабочем объеме оптимальных условий для роста микроорганизмов, включая средства формирования требуемого режима инкубации (средства нагрева, увлажнения, поддержания концентрации СО2 и циркуляции воздуха) рабочего объема. Камера инкубации может быть снабжена датчиками контроля температуры, влажности, состава среды, и средствами, обеспечивающими возможность поддержания требуемых параметров в автоматическом режиме.
В одном из вариантов осуществления изобретения камера 1 выполнена в виде корпуса, имеющего переднюю, заднюю, боковые стенки, крышу и днище (фиг. 2 и 3). Камера снабжена дверцей для ее обслуживания, а также, по меньшей мере, одним окном 9 для загрузки и выгрузки контейнеров с биологическими образцами и двумя окнами - верхним 10 и нижним 11, для связи с двумя модулями 4 формирования цифрового изображения образцов (модулями фотографирования). При этом окно для загрузки и выгрузки контейнеров 9 выполнено в передней стенке камеры 1 предпочтительно в ее средней части, а дверца камеры 1 - со стороны ее задней стенки. В одном из вариантов осуществления изобретения задняя стенка может быть выполнена в виде дверцы, как показано на фиг. 3. При этом дверца и передняя стенка могут иметь выпуклый профиль внешней поверхности. Выпуклая форма передней стенки камеры позволяет осуществить скрытый монтаж элементов модуля загрузки-выгрузки. Окно для загрузки и выгрузки контейнеров 9 снабжено шлюзом, выполненным с возможностью ограничения утечки среды из камеры инкубации, который открывается на время загрузки контейнера в камеру инкубации или выгрузки из нее по сигналу с соответствующего датчика, расположенного на транспортере загрузки 12 с внешней стороны камеры или на транспортере выгрузки с внутренней стороны камеры и связанного с блоком управления 6. Блок управления 6 после получения сигнала с датчика направляет сигнал на привод шлюза - сигнал на открытие или закрытие шлюза. Таким образом, шлюз открывается автоматически, а контейнер с образцом перемещается с внешнего конвейера на внутреннее устройство модуля загрузки и выгрузки 2. Для отслеживания перемещения образца в рабочем объеме камеры 1 в режиме реального времени может быть использовано программное обеспечение, при этом контейнер с образцом снабжен машиночитаемой меткой (например, штрих-кодом, меткой RFID, и т. д.), а камера 1 (как минимум, в месте входа контейнера, месте выхода контейнера и модулях фотографирования 4) снабжена соответствующими считывающими устройствами для этой метки. После выгрузки контейнеров из камеры инкубации на транспортер образцы могут быть отправлены на утилизацию, могут быть переданы в специальный лоток для ручного извлечения оператором или могут быть автоматически перемещены в следующий модуль или прибор. В одном из вариантов осуществления камеры инкубации 1 для загрузки и выгрузки контейнеров могут быть использованы отдельные окна со своими шлюзами, или шлюз может быть выполнен из двух перемещающихся независимо друг от друга частей.
Помимо первого окна - окна для загрузки и выгрузки контейнеров 9, на передней стенке также расположены второе и третье окна - верхнее окно 10 и нижнее окно 11 для связи с соответствующими модулями формирования цифрового изображения образцов. При этом окно 10 расположено над окном 9, а третье окно 11 - под окном 9. Такое расположение окон для связи с модулем 4 относительно окна 9 позволяет модулям фотографирования функционировать независимо друг от друга. При этом перемещение чашек в рабочем объеме камеры 1 осуществляется с использованием соответствующего трехкоординатного манипулятора 7, обслуживающего свой модуль фотографирования и общую зону загрузки-выгрузки.
В различных вариантах осуществления изобретения корпус камеры инкубации может иметь отдельные отсеки для размещения верхнего и нижнего модулей фотографирования. Предпочтительным является размещение модулей фотографирования в отдельных отсеках с внешней стороны камеры инкубации 1, как показано на фиг. 4. При этом расстояние между упомянутыми отсеками не должно быть менее высоты окна 9 для загрузки и выгрузки контейнеров.
Размещение полок с ячейками может быть реализовано различными способами. Каждая ячейка приспособлена для приема и удержания в ней контейнера с образцом в процессе инкубации. Предпочтительным является размещение полок по окружности (как показано на фиг. 3) для обеспечения доступа захвата трехкоординатного манипулятора 7 к ее ячейкам. Камера инкубации 1 может включать различное количество ячеек в зависимости от задач микробиологической лаборатории, например, от 600 до 720 ячеек. Каждая ячейка характеризуется координатами ее пространственного местоположения.
Модуль загрузки и выгрузки контейнеров с образцами 2 (фиг. 1, 2) может иметь различное конструктивное выполнение. В одном из вариантов реализации данный модуль содержит два блока, один из которых расположен в камере инкубации - первый блок (или внутренний блок), второй - за пределами рабочего объема камеры инкубации - второй блок (или внешний блок). Внешний блок 14 имеет два конвейера (транспортера) 12 и 13, расположенные на разных высотных уровнях на основаниях, которые могут быть жестко соединены с корпусом камеры инкубации 1. Конвейеры (транспортеры) 12 и 13 выполнены с возможностью перемещения во встречных направлениях и оснащены независимыми электроприводами. На транспортер загрузки 12 контейнеры поступают из лотков загрузки 15, количество которых может варьироваться в зависимости от вместимости камеры инкубации - от двух и более. Лотки загрузки сконфигурированы под габариты используемых контейнеров. При использовании в качестве контейнеров, например, чашек Петри, лотки загрузки выполнены с возможностью размещения в них чашек Петри в один ряд по горизонтали и, по меньшей мере, в два ряда по вертикали, при этом боковые стенки для чашек Петри выступают в качестве направляющих. В конкретном варианте выполнения (фиг. 2) лотки загрузки имеют прямоугольную конфигурацию и габариты, обеспечивающие размещение в них одной чашки Петри по ширине, не менее 10 чашек по высоте и до 5 стопок из чашек по длине. Лотки предпочтительно оснащены оптическими датчиками наличия контейнеров для определения приоритетов подачи контейнеров на транспортер в зависимости от алгоритма использования системы инкубации. Внутренний блок содержит две площадки для размещения контейнеров, расположенных в проекции окна 9 камеры инкубации 1, одна из которых предназначена для загружаемого в камеру контейнера, вторая - для размещения выгружаемых из камеры инкубации контейнеров, при этом каждая из площадок снабжена средством вертикального перемещения контейнеров (лифтами) с электроприводами и винтовой передачей в зону сканирования и средством вращения контейнера для сканирования.
После выгрузки контейнера из камеры инкубации контейнер по транспортеру выгрузки 13 может направляться в бокс выгрузки, который является приёмной частью лотка выгрузки контейнеров. Лотки выгрузки контейнеров могут иметь конфигурацию, аналогичную лоткам для загрузки контейнеров 15.
Модуль идентификации образца (модуль сканирования) 3 включает в себя не менее двух сканеров штрих-кодов, расположенных с внутренней стороны шлюза камеры инкубации 1, закрепленных на кронштейне или платформе, соединенной с основанием внутреннего транспортера от шлюза до лифта в камере инкубации, и средства подсветки сканируемой области, закрепленные на кронштейне или платформе, которые могут быть выполнены в виде светодиодных светильников. Каждый контейнер с образцом заранее маркирован, например, при помощи штрих-кода. Сканер расположен с возможностью проведения идентификации контейнера с образцом при загрузке и выгрузке путем чтения и расшифровки этого кода. В альтернативном варианте исполнения система инкубации может быть оснащена системой считывания радиометок (RFID или NFC).
Модуль формирования цифровых изображений образцов (модуль фотографирования) 4 (фиг. 4 - 17) включает блок (или узел) 16 перемещения контейнера и блок (или узел) 17 формирования цифрового изображения (цифровой оптический блок). При этом блок 16 может быть размещен в рабочем объеме камеры инкубации, а блок 17 размещен в отдельном отсеке камеры инкубации или отдельном корпусе, который примыкает к камере инкубации 1 с внешней стороны и сообщается с рабочим объемом камеры инкубации через соответствующее окно (верхнее окно 10 и нижнее окно 11 для связи с модулем 4). Таким образом, контейнер с образцом может быть перемещен из рабочего объема камеры 1 через окно 10 или 11 с помощью блока 16 в цифровой оптический блок 17.
В модуле фотографирования траектория перемещения контейнеров из камеры инкубации в цифровой оптический блок включает три типа перемещений - в вертикальном направлении, в горизонтальном направлении и угловой поворот, которые реализуются посредством входящих в данный блок конструктивных элементов. В частности, перемещение контейнеров в вертикальном направлении осуществляются с помощью соответствующего средства, выполненного в виде лифта (фиг. 11, 12), имеющего в различных вариантах исполнения неподвижный 43 или поворотный 27 столик. Перемещение контейнера в горизонтальном направлении осуществляется с помощью транспортировочной корзины 37 (фиг. 9), снабженной средством перемещения, закрепленной на каретке 38 (фиг. 15), перемещающейся по направляющим рельсам 39 (фиг. 9). Угловое перемещение контейнеров реализуется с помощью поворотного диска 31, ось которого закреплена на неподвижной опорной платформе 30 (фиг. 6, 8). Поворотный диск 31 снабжен двумя одинаковыми ячейками (гнездами) 33 и 34 для размещения контейнеров, где одна из ячеек - 33, выполняет функцию приемной (принимает контейнер, передаваемый 3-х координатным манипулятором, из рабочего объема камеры инкубации для фотографирования) и в исходном положении поворотного диска расположена со стороны камеры инкубации, вторая ячейка 34 выполняет функцию промежуточной (или буферной) при перемещении контейнера 8 в цифровой оптический блок 17 и расположена на поворотном диске 31 со стороны упомянутого оптического блока. В предпочтительном варианте реализации изобретения данные ячейки расположены на одной оси, проходящей через центр диска. Таким образом, при повороте диска на 180 градусов положение ячеек изменяется, приемная ячейка 33 начинает выполнять функцию промежуточной 34, промежуточная 34 становится приемной 33 для следующего контейнера из камеры инкубации. Такое перемещение контейнеров в модуле фотографирования 4 ускоряет процесс фотографирования образцов, поступающих из камеры инкубации 1, повышает скорость работы заявляемого устройства по сравнению с прототипом (до 240 фотографий образцов в час по сравнению со 150 фотографиями образцов в час у прототипа) - в то время пока один из контейнеров 8 находится под объективом камеры цифрового оптического блока, во входную ячейку 33 диска 31 может быть установлен следующий контейнер с образцом, и транспортировка контейнеров с образцами (возврат первого контейнера в камеру инкубации после фотографирования и прием следующего контейнера на фотографирование) происходит параллельно.
В конкретном варианте реализации изобретения перемещение контейнеров в модуле фотографирования реализуется по следующему алгоритму, который продемонстрирован на фиг. 13 - 17: 1) в исходном положении площадка 20 приемного лифта 18 находится над соответствующей ячейкой 33 поворотного диска 31, на данную площадку трехкоординатный манипулятор 7 устанавливает контейнер 8 с биологическим образцом, который далее лифтом перемещается в вертикальном направлении в приемную ячейку 33 поворотного диска 31; 2) поворотный диск 31 перемещает полученный контейнер 8 в горизонтальной плоскости на угол 180 градусов, с установкой контейнера на площадку 21 второго лифта 19, расположенного под данной ячейкой; 3) второй лифт 19 перемещает контейнер 8 в вертикальном направлении на уровень ниже поворотного диска 31 с размещением контейнера в транспортировочной корзине 37; 4) транспортировочная корзина 37 при перемещении по направляющим рельсам 39 доставляет контейнер 8 с образцом в цифровой оптический блок 17 для фотографирования. Таким образом, перемещение контейнера из камеры инкубации 1 в цифровой оптический блок 17 осуществляется на двух уровнях по высоте, сначала по платформе 30 при помощи поворотного диска 31, а затем - ниже уровня платформы при помощи корзины 37, и траектория перемещения контейнера представляет собой пространственную кривую, имеющую четыре последовательно расположенных участка по направлению от верхнего уровня к нижнему - прямолинейного вертикально ориентированного, в нижней точке переходящего в полуокружность в горизонтальной плоскости, которая соединяется со следующим прямолинейным вертикально ориентированным участком, направленным вниз, который в своей нижней точке переходит в прямолинейный горизонтально ориентированный участок. Перемещение контейнера 8 в камеру инкубации 1 после фотографирования осуществляется в обратном порядке.
Далее представлено более подробное описание блока перемещения контейнеров 16.
Как было упомянуто выше блок перемещения контейнеров 16 включает неподвижную опорную платформу 30, под которой расположен электродвигатель 32, и расположенный на платформе 30 поворотный диск 31 с двумя ячейками 33 и 34, выполненный с возможностью перемещения контейнера от входной ячейки 33 к ячейке передачи на фотографирование (или промежуточной, или буферной ячейке) 34, и верхнюю откидную крышку 35, закрывающую диск 31. Крышка 35 находится в закрытом положении при работе инкубатора, закрывает промежуточную ячейку 34, расположенную со стороны цифрового оптического блока 17, и не препятствует вращению диска совместно с контейнером. Опорная платформа 30 выполнена неподвижной и имеет пазы для установки в корпусе камеры инкубации 1 на кронштейнах, закрепленных на стенках корпуса с его внутренней стороны.
Перемещения контейнеров в вертикальном направлении осуществляются с помощью двух лифтов - 18 и 19, электродвигатели 22 и 23 которых смонтированы под неподвижной платформой 30. Для реализации возвратно-поступательного перемещения контейнера в вертикальном направлении в соответствии с описанным выше алгоритмом перемещения контейнера, один из лифтов - 18, выполняет функцию приемного, размещен под входной ячейкой 33 поворотного диска 31, другой лифт 19 размещен под буферной ячейкой 34. Лифт 18 содержит кронштейн 26 с площадкой 20 для размещения контейнера в которую встроен датчик 53 наличия контейнера на лифте, вертикально ориентированные направляющие 25, подъемный механизм в виде шагового электродвигателя 22, снабженного ременной передачей 24 для перемещения кронштейна 26 по направляющим 25. Лифт 19 выполнен аналогично лифту 18, при этом дополнительно снабжен поворотным столиком 27 с датчиком наличия контейнера 53 и механизмом вращения 44 контейнера, выполненным в виде шагового электродвигателя, размещенного в своем цилиндрическом корпусе 28, который закреплен на кронштейне под поворотным столиком 27. Как правило, корпус 28, в котором расположен электродвигатель поворотного столика, имеет меньший диаметр по сравнению с диаметром поворотного столика для размещения контейнеров. Однако в отдельных вариантах реализации диаметр поворотного столика 27 и диаметр корпуса 28 для размещения его двигателя могут быть равны. Датчик 53 наличия контейнера на лифте предпочтительно размещен в центре поворотного столика 27. Лифты 18 и 19 также снабжены датчиками 55 верхнего и нижнего положения контейнера на лифте (концевыми выключателями), которые предпочтительно представляют собой оптические датчики, закрепленные на монтажной поверхности (на которой могут быть смонтированы и другие конструктивные элементы лифта, включая двигатель и направляющие), при этом в конструкцию лифта входит флажок 29, который закреплен на кронштейне 26 с возможностью перекрытия оптического сигнала от датчиков при достижении контейнером его крайнего верхнего или крайнего нижнего положений.
Для перемещения лифта неподвижная опорная платформа 30, на которой закреплен поворотный диск, снабжена сквозными отверстиями 41 в проекции размещения площадки 20 (или 21) и поворотного столика 31 упомянутых лифтов. В опорной платформе 30 отверстие, расположенное в проекции площадки 20 приемного лифта 18, может иметь меньший диаметр по сравнению с диаметром контейнера (чашки Петри), и, как правило, диаметром поворотного столика. Это обусловлено необходимостью перемещения кронштейна 26 лифта с закрепленным на нем корпусом 28 для размещения двигателя поворотного столика из положения на уровне опорной платформы 30 в верхнюю точку, расположенную над уровнем поворотного диска 31, для приема контейнера с последующим его перемещением из данной точки вниз через приемную ячейку 33 поворотного диска 31 с установкой контейнера на неподвижную опорную платформу 30. При этом отверстие в поворотном диске 31, выполняющее функцию приемной ячейки 33, имеет больший диаметр, чем диаметр отверстия в опорной платформе для лифта, что обеспечивает перемещение лифта выше уровня платформы и поворотного диска в зону досягаемости 3-х координатного манипулятора 7, устанавливающего контейнер на лифт или снимающего контейнер с лифта. Таким образом, лифт перемещается выше поворотного диска 31 для приема контейнера, а затем, приняв контейнер, перемещает его на уровень платформы 30.
Лифт 19, расположенный под буферной ячейкой 34, может быть выполнен с возможностью сканирования размещенного на нем контейнера 8, при этом сканер для идентификации контейнера закреплен под буферной ячейкой опорной платформы 30 напротив поворотного столика 27 лифта на высоте, соответствующей середине хода столика от верхнего до нижнего положения.
Поворотный диск 31 оснащен своим электродвигателем 32 с ременной передачей. Ячейки 33 и 34 поворотного диска выполнены с внутренней поверхностью конической формы для размещения контейнера, исключающей его застревание в ячейке в процессе перемещения, что позволяет менять местами контейнер, находящийся в приемной (входной) ячейке 33, и контейнер, находящийся в ячейке передачи на фотографирование 34. Со стороны внутренней поверхности ячейки выполнен выступ с возможностью фиксации крышки контейнера (чашки Петри) при перемещении контейнера ниже уровня диска 31 при передаче контейнера на фотографирование. Крышка контейнера может фиксироваться как механически, опираясь на выступ в диске, так и при помощи создания разрежения над крышкой через канал 36 в откидной крышке.
Средство перемещения контейнера в горизонтальном направлении включает транспортировочную корзину 37, расположенную ниже уровня платформы 30 под ячейкой передачи контейнера на фотографирование 34. Транспортировочная корзина 37 консольно закреплена на подвижной каретке 38, которая в свою очередь закреплена на направляющих рельсах 39. Транспортировочная корзина 37 снабжена своим электродвигателем 40 с ременной передачей (приводом), обеспечивающей возвратно-поступательное перемещение корзины в горизонтальном направлении по направляющим рельсам 39 от зоны приема контейнера из промежуточной ячейки 34 поворотного диска 31 в зону фотографирования - под объектив 52 фотокамеры 51. Транспортировочная корзина 37 в одном из вариантов осуществления изобретения может быть выполнена в виде опорного кольца, имеющего конфигурацию, обеспечивающую размещение в нем контейнера.
Средство перемещения контейнера в горизонтальном направлении в одном из вариантов реализации может содержать шторку 45, движущуюся по направляющим рельсам 47, снабженную своим приводом 46 (электродвигателем с ременной передачей), обеспечивающим возвратно-поступательное перемещение шторки по направляющим рельсам под объектив 52 фотокамеры 51 для формирования изображений на темном или светлом фоне. Шторка 45 размещена ниже уровня расположения транспортировочной корзины 37 таким образом, что при размещении корзины в цифровом оптическом блоке под объективом фотокамеры, шторка расположена под транспортировочной корзиной (под контейнером), перекрывая световой поток от нижних светильников при их использовании в конструкции данного блока. Средство перемещения контейнера в горизонтальном направлении снабжено датчиками положения 54 шторки - «закрыто» или «открыто», установленными на площадке 42 (средство перемещения корзины имеет аналогичную площадку) при ее положении под камерой и за пределами данной зоны, соответственно. Шторка предназначена для получения цифровых изображений на темном фоне, в ее отсутствии получают фотографии на светлом фоне.
Цифровой оптический блок 17 (фиг. 4, 10) размещен снаружи камеры инкубации 1 и сообщается с блоком перемещения контейнеров 16 через окно 10 или 11, через которое проходят направляющие рельсы для перемещения транспортировочной корзины, и направляющие рельсы для перемещения шторки. Цифровой оптический блок размещен в своем корпусе, примыкающем к корпусу камеры инкубации с внешней стороны, и содержит, по меньшей мере, два источника света или светильника (верхний 48 и нижний 49 - фиг. 7), расположенные с обеспечением равномерного освещения размещенного в контейнере биологического образца. Светильники выполнены с рассеивателями 50 цилиндрической, конической, параболической или сферической формы, что позволяет направлять свет на контейнер с образцом и цифровую фотокамеру 51, установленную в верхней части корпуса цифрового блока. При этом объектив камеры 52 расположен в отверстии, выполненном в корпусе, над площадкой для размещения контейнера с образцом для фотографирования, соосно верхнему и нижнему светильникам. Фокусировка камеры может осуществляться как вручную, так и при помощи отдельного электропривода.
Модуль перемещения контейнеров в рабочем объеме камеры инкубации 5 (фиг. 3 - 4) содержит два 3-х координатных манипулятора 7, которые расположены в камере один над другим с возможностью обслуживания каждым манипулятором своей зоны - верхней и нижней, соответственно. При этом верхний манипулятор обеспечивает перемещение контейнеров между окном загрузки и выгрузки контейнеров 10, верхним модулем фотографирования и соответствующими (верхними) ячейками камеры инкубации; нижний манипулятор обеспечивает перемещение контейнеров между окном загрузки и выгрузки контейнеров 11, нижним модулем фотографирования и соответствующими (нижними) ячейками камеры инкубации. Перемещение манипуляторов в модуле 5 может быть реализовано независимо друг от друга в соответствии с управляющими программами. Захват манипулятора имеет головку, фигурные губки (зажимы) с накладками, повторяющими часть внешней поверхности контейнера, при этом головка захвата выполнена с возможностью поворота вокруг горизонтальной оси для обеспечения изменения положения контейнера при взятии с полки/установке на полку (переворота контейнера). Это позволяет фотографировать размещенные в контейнерах образцы в обычном положении, а хранить - крышкой вниз для минимизации попадания конденсата на образец.
Поскольку манипуляторы механически имеют возможность переместиться в одну и ту же точку в пространстве (в рабочем объеме) камеры инкубации, в системе инкубации реализована совокупность программно-аппаратных мер по исключению их соударения в «красной зоне». Для этой цели датчики непрерывного контроля положения координат захвата каждого манипулятора, размещенные на вертикальной оси сервопривода, выдают непрерывный сигнал, получаемый в управляющем программном обеспечении, после чего блоком управления рассчитываются и формируются координаты, в которые может перемещаться второй (другой) манипулятор, и передается соответствующий сигнал на первый манипулятор для выполнения им команды по его перемещению в допустимое (безопасное) место в рабочем объеме камеры или остановке во избежание столкновения. Так, например, в момент, когда один из манипуляторов находится в области окна загрузки контейнеров, для второго манипулятора формируется разрешающий сигнал на перемещение в область модуля формирования цифрового изображения, при этом запрещающий сигнал на перемещение в область окна загрузки. Кроме того, сервопривод вертикальной оси каждого манипулятора имеет индуктивный датчик наличия подвижной части в опасной зоне («красной зоне»). Сигнал указанных датчиков от каждого манипулятора также передается в блок защиты блока управления 6, который формирует по срабатыванию этих датчиков сигнал на остановку сервопривода.
Блок управления системой 6 (фиг. 1) представляет собой программно-аппаратный комплекс, включает локальное хранилище для программного обеспечения, необходимого для управления элементами системы, и независимое локальное хранилище для фотографий. Блок управления может содержать микропроцессор и комплект плат управления или микроконтроллеров, которые управляют функциями системы и обеспечивают работу по заданному алгоритму камеры инкубации, модуля загрузки и выгрузки контейнеров с образцами, модуля идентификации образца (сканеры), модулей формирования цифрового изображения (модулей фотографирования) образцов, манипуляторов модуля перемещения контейнеров в рабочем объеме камеры. Блок управления состоит из источников питания, преобразователей напряжения, защитных автоматов, плат управления шаговыми двигателями, плат управления двигателями постоянного тока, плат управления светильниками, нагревателями и прочим оборудованием камеры инкубации. Элементы блока управления системой размещены под лицевыми панелями камеры инкубации или блока загрузки/выгрузки. Компоновка элементов блока управления может осуществляться на специальных панелях (щитах) или DIN-рейках. От внутреннего объема камеры инкубации элементы блока управления изолированы стенками корпуса камеры инкубации, от внешних воздействий - лицевыми панелями.
Система для инкубации и формирования цифровых изображений биологических образцов с заявленным модулем фотографирования работает следующим образом.
Из лотков загрузки 15 контейнеры поочередно перемещаются на ленту транспортера 12. Контейнеры, подаваемые через лоток приоритетной загрузки, формируют сигнал на датчике наличия приоритетного контейнера, после чего программное обеспечение системы инкубации обеспечивает внеочередную транспортировку контейнера в камеру инкубации 1. Контейнер, покидая ленту транспортера 12, через шлюз подается в камеру инкубации 1, где на приемном лифте сканер штрих-кодов считывает штрих-код для идентификации контейнера и сопоставляет его номер с программой инкубации в базе данных системы инкубации. После идентификации контейнера манипулятор при помощи захвата берет контейнер и перемещает его в ячейку камеры инкубации, заданную управляющей программой. Перемещение осуществляется по трем координатам при помощи сервопривода вертикальной оси, поворотного стола и привода горизонтальной оси. В ходе инкубации требуется периодически получать фотографии содержимого контейнера, для чего манипулятор перемещает контейнер к модулю фотографирования 4, а именно к верхнему или нижнему модулю. В модуле фотографирования контейнер при помощи приемного лифта опускается на уровень поворотного диска, диск поворачивается, перемещая контейнер к лифту транспортировочной корзины. Лифт корзины опускает контейнер в корзину, где происходит сканирование штрих-кода контейнера, и привод корзины подает контейнер к объективу фотокамеры. Привод шторки позволяет получать снимки контейнера на темном и светлом фоне, перемещая шторку к контейнеру или от него. В то время, пока контейнер с образцом фотографируется, приемный лифт принимает следующий контейнер, после окончания цикла фотографирования для предыдущего контейнера поворотный диск меняет контейнер местами, и новый контейнер перемещается в корзину, а контейнер, покинувший модуль фотографирования 4, манипулятором транспортируется на свое место. Камера инкубации характеризуется высокой производительностью, которая может быть еще увеличена за счет одновременного перемещения отдельных подвижных частей модуля фотографирования. Так, например. лифт приемной и промежуточной ячеек могут двигаться одновременно и независимо друг от друга, шторка и корзина могут перемещаться одновременно.
После завершения цикла инкубации контейнер манипулятором транспортируется к лифту выгрузки, идентифицируется сканером штрих-кодов и, пройдя через шлюз, покидает камеру инкубации 1, попадает на ленту транспортера 13 и подается в один из лотков выдачи (выгрузки), после чего может быть утилизирован или отправлен на дополнительное исследование.
Пример реализации изобретения.
Изготовлен макет камеры инкубации, обеспечивающей вместимость до 720 чашек Петри. В камере зеркально установлены два трехкоординатных манипулятора, как показано на фиг. 4, 5, один из которых закреплен на крыше камеры, второй - на днище камеры. Каждый манипулятор оснащен захватом и 3-координатным приводом. В средней части передней стенки камеры выполнено окно загрузки и выгрузки контейнеров с лифтами, состоящими из шаговых электродвигателей и винтовых передач и сканерами штрих-кодов для идентификации контейнеров. В макете был установлен модуль фотографирования, выполненный аналогично модулю, представленному на фиг. 6 - 12, и оснащенному цифровой камерой Daheng Imaging с разрешением 25 Мп. Снаружи камеры инкубации был установлен внешний блок модуля загрузки и выгрузки контейнеров с образцами, содержащий транспортер загрузки, транспортер выгрузки. Результаты проведенных испытаний заявленной системы продемонстрировали возможность получения до 360 фотографий образцов в час, в то время как автоматизированная система BD Kiestra ReadA (США) при сопоставимой вместимости камеры инкубации - позволяет получить около 300 фотографий в час.
В системе BD Kiestra ReadA в модуль формирования цифрового изображения образец поступает следующим образом: трехкоординатный манипулятор устанавливает контейнер с образцом на неподвижную платформу, после чего контейнер по транспортеру направляется к поворотному диску. Поворотный диск, поворачиваясь на 90 градусов, помещает образец в зону под объектив камеры, а затем, еще раз повернувшись на 90 градусов передает контейнер на транспортер для возврата в камеру инкубации. В то время как поворотный диск развернут к объективу, ячейки поворотного диска располагаются таким образом, что диск не может принять следующий контейнер с образцом, таким образом, работа с образцами ведется последовательно, а траектория контейнера с образцом представляет собой плоскую кривую.
В заявляемом же устройстве поворотный диск заменяет собой транспортер, а перемещение контейнера с образцом происходит на двух уровнях по высоте: сначала по платформе при помощи поворотного диска, а затем - ниже уровня платформы при помощи корзины, и траектория контейнера представляет собой пространственную кривую. Кроме того, в заявляемом устройстве, в то время как один из контейнеров находится у объектива камеры, во входную ячейку диска может быть установлен следующий образец, и транспортировка образцов (возврат первого и прием последующего) происходит параллельно, что и повышает скорость работы заявляемого устройства по сравнению с прототипом.
Таким образом, заявленное устройство демонстрирует более высокую производительность получения цифровых изображений биологических образцов, помещенных в контейнеры, за счет оптимизации траектории перемещения контейнеров в данном модуле с обеспечением возможности приема второго контейнера с образцом и его перемещения в буферную зону во время фотографирования образца из первого контейнера.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| СИСТЕМА ДЛЯ ИНКУБАЦИИ И ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811721C1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В КАМЕРЕ ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2812238C1 |
| МОДУЛЬ ЗАГРУЗКИ И ВЫГРУЗКИ КОНТЕЙНЕРОВ ДЛЯ КАМЕРЫ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811536C1 |
| ЦИФРОВОЙ ОПТИЧЕСКИЙ БЛОК, УСТРОЙСТВО И СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825976C1 |
| СПЕКТРОСКОПИЧЕСКАЯ ГОЛОВКА ДЛЯ ЦИФРОВОГО ОПТИЧЕСКОГО БЛОКА УСТРОЙСТВА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825977C1 |
| Автоматизированная система камер для обработки имплантатов | 2025 |
|
RU2839087C1 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| Поворотный контейнер подложки с "маской" для формирования тонких пленок различной конфигурации | 2022 |
|
RU2794157C1 |
| АВТОМАТ ДЛЯ ВЫДАЧИ НАПИТКОВ С ВЕСОВЫМ ДОЗИРОВАНИЕМ ИНГРЕДИЕНТОВ | 2017 |
|
RU2652548C1 |
Изобретение относится к модулям для формирования цифровых изображений биологических образцов для камеры инкубации биологических образцов. Модуль содержит цифровой оптический блок и блок перемещения контейнеров с биологическими образцами, включающий средство углового перемещения контейнера в горизонтальной плоскости, выполненное в виде размещенного на неподвижной платформе поворотного диска с двумя ячейками для размещения контейнеров. Блок перемещения контейнеров дополнительно содержит по меньшей мере два средства перемещения контейнеров в вертикальном направлении, выполненные в виде лифта с площадками для размещения контейнеров, и средство перемещения контейнера в горизонтальном направлении. Одно из средств перемещения контейнеров в вертикальном направлении выполнено с возможностью перемещения контейнера из верхнего положения над уровнем поворотного диска в нижнее положение на уровне платформы с размещением контейнера в одной из ячеек поворотного диска, являющейся приемной ячейкой, и обратно. Второе средство перемещения контейнеров в вертикальном направлении выполнено с возможностью перемещения контейнера из данной ячейки поворотного диска после ее углового перемещения, на уровень, ниже уровня неподвижной платформы, и обратно. Средство перемещения контейнера в горизонтальном направлении выполнено с возможностью транспортировки контейнера в цифровой оптический блок для фотографирования. Система формирования цифровых изображений содержит два модуля формирования цифровых изображений, один из которых расположен над входным окном камеры инкубации, второй – под входным окном камеры инкубации, при этом входное окно выполнено в передней стенке камеры инкубации в ее центральной части. Изобретение обеспечивает повышение производительности модуля формирования цифровых изображений биологических образцов. 2 н. и 15 з.п. ф-лы, 17 ил.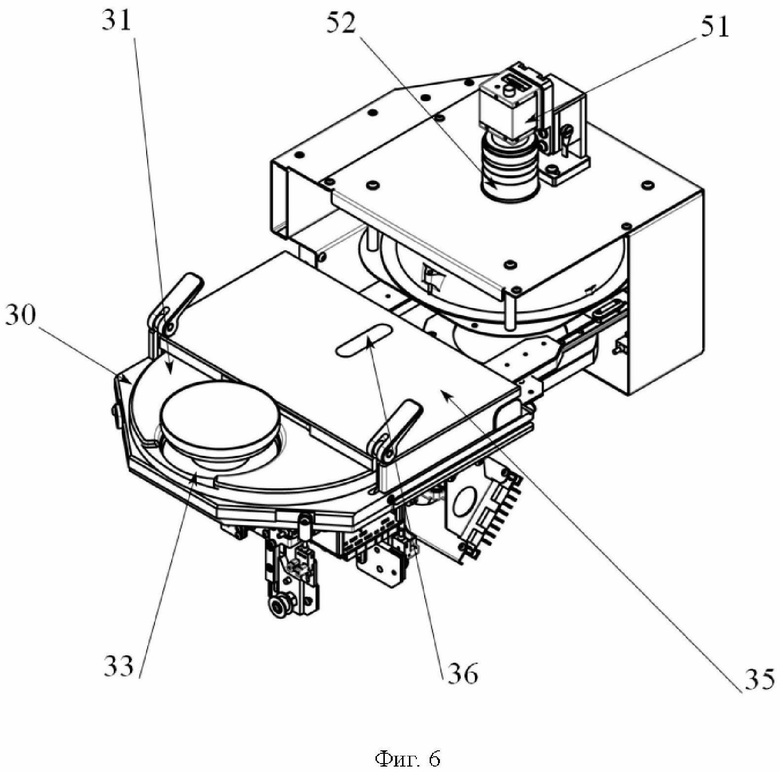
1. Модуль формирования цифровых изображений для камеры инкубации биологических образцов, содержащий цифровой оптический блок и блок перемещения контейнеров с биологическими образцами, включающий средство углового перемещения контейнера в горизонтальной плоскости, выполненное в виде размещенного на неподвижной платформе поворотного диска с двумя ячейками для размещения контейнеров,
отличающийся тем, что блок перемещения контейнеров дополнительно содержит по меньшей мере два средства перемещения контейнеров в вертикальном направлении, выполненные в виде лифта с площадками для размещения контейнеров, и средство перемещения контейнера в горизонтальном направлении, при этом
одно из средств перемещения контейнеров в вертикальном направлении выполнено с возможностью перемещения контейнера из верхнего положения над уровнем поворотного диска в нижнее положение на уровне платформы с размещением контейнера в одной из ячеек поворотного диска, являющейся приемной ячейкой, и обратно;
второе средство перемещения контейнеров в вертикальном направлении выполнено с возможностью перемещения контейнера из данной ячейки поворотного диска после ее углового перемещения, на уровень, ниже уровня неподвижной платформы, и обратно;
средство перемещения контейнера в горизонтальном направлении выполнено с возможностью транспортировки контейнера в цифровой оптический блок для фотографирования.
2. Модуль по п.1, отличающийся тем, что поворотный диск выполнен с возможностью поворота ячеек на 180 градусов.
3. Модуль по п.1, отличающийся тем, что ячейки поворотного диска являются идентичными и выполнены с расположением их центров на одной диаметральной оси диска.
4. Модуль по п.1, отличающийся тем, что неподвижная платформа снабжена сквозными отверстиями, сконфигурированными с возможностью перемещения через них площадок лифтов, при этом отверстия расположены под ячейками поворотного диска в проекции упомянутых площадок лифтов.
5. Модуль по п.1, отличающийся тем, что средство перемещения контейнеров в вертикальном направлении содержит кронштейн, на котором размещена площадка для размещения контейнера, снабженная датчиком наличия контейнера на лифте, вертикально ориентированные направляющие, подъемный механизм в виде шагового электродвигателя, снабженного ременной передачей для перемещения кронштейна по направляющим, датчики верхнего и нижнего положения контейнера на лифте.
6. Модуль по п.1, отличающийся тем, что средство перемещения контейнеров в вертикальном направлении содержит кронштейн, снабженный поворотным столиком для размещения контейнера с датчиком наличия контейнера, вертикально ориентированные направляющие, подъемный механизм в виде шагового электродвигателя, снабженного ременной передачей для перемещения кронштейна по направляющим, механизм вращения поворотного столика, выполненный в виде шагового электродвигателя, размещенного в своем цилиндрическом корпусе, который закреплен на кронштейне под поворотным столиком, датчики верхнего и нижнего положения контейнера на лифте.
7. Модуль по п.1, отличающийся тем, что при использовании контейнеров в виде чашек Петри ячейки поворотного диска имеют диаметр больше диаметра чашки, но меньше диаметра ее крышки и выполнены с опорными поверхностями для крышки, обеспечивающими возможность перемещения в зону фотографирования чашек без крышки.
8. Модуль по п.1, отличающийся тем, что средство перемещения контейнера в горизонтальном направлении содержит горизонтально ориентированные направляющие рельсы и транспортировочную корзину, выполненную с возможностью перемещения по направляющим рельсам.
9. Модуль по п.8, отличающийся тем, что транспортировочная корзина снабжена кареткой, подвижно закрепленной на направляющих рельсах.
10. Модуль по п.9, отличающийся тем, что транспортировочная корзина выполнена в виде опорного кольца, консольно закрепленного на каретке.
11. Модуль по п.1, отличающийся тем, что средство перемещения контейнера в горизонтальном направлении снабжено шторкой, выполненной с возможностью возвратно-поступательного перемещения в горизонтальном направлении и размещения в зоне фотографирования под транспортировочной корзиной с возможностью перекрытия светового потока от нижних светильников.
12. Модуль по п.11, отличающийся тем, что средство перемещения контейнера в горизонтальном направлении снабжено отдельными горизонтально ориентированными направляющими рельсами для перемещения по ним шторки.
13. Модуль по п.1, отличающийся тем, что все средства перемещения снабжены датчиками положения контейнера.
14. Система формирования цифровых изображений для камеры инкубации биологических образцов, содержащая два модуля формирования цифровых изображений, выполненных по п.1, один из которых расположен над входным окном камеры инкубации, второй – под входным окном камеры инкубации.
15. Система по п.14, отличающаяся тем, что входное окно выполнено в передней стенке камеры инкубации в ее центральной части.
16. Система по п.14, отличающаяся тем, что модули формирования цифровых изображений расположены на равноудаленном по высоте расстоянии от входного окна камеры инкубации.
17. Система по п.14, отличающаяся тем, что цифровой оптический блок, расположен в отдельном корпусе, выполненном сообщающимся с рабочим объемом камеры инкубации.
| US 11041871 B2, 22.06.2021 | |||
| EP 3228691 A1, 11.10.2017 | |||
| US 2012251275 A1, 04.10.2012. |

