Область техники, к которой относится изобретение
Изобретение относится к лабораторному оборудованию для проведения микробиологических исследований, а именно к автоматизированным микробиологическим лабораториям и системам, позволяющим проводить инкубирование микроорганизмов и клеточных структур, размещенных в контейнерах, например, в чашках Петри, и их исследование по цифровым изображениям результатов посева, включая регистрацию роста колоний в режиме реального времени, идентификацию микробного агента в образце, определение его резистентности к антибактериальным препаратам и т.д.
Уровень техники
В настоящее время наблюдается активное развитие микробиологической отрасли, одной из задач которой является внедрение автоматизированных систем и оборудования для инкубации микроорганизмов и клеточных структур и проведения микробиологических исследований. С ростом количества проводимых микробиологических исследований актуальным является разработка высокопроизводительных систем, повышение скорости проведения исследования при обеспечении высокого качества получаемого результата, в том числе и за счет исключения ошибок, вызванных человеческим фактором, а также повышение общей эффективности лабораторной службы.
Из уровня техники известны различные автоматизированные системы, использующие в своем составе модули инкубации и исследования микробиологических и клеточных культур (образцов). Известные системы содержат камеры инкубации, которые представляют собой изолированные боксы, снабженные средствами контроля параметров среды, формируемой в рабочем объеме камеры для роста микроорганизмов, включая температуру, влажность, состав атмосферы, в т.ч. количество углекислого газа и/или кислорода. При этом камеры инкубации оснащены ячейками для размещения контейнеров с образцами, блоками загрузки и выгрузки контейнеров с образцами, блоками перемещения контейнеров в рабочем объеме камеры инкубации, и блоками оптической или цифровой визуализации образцов в процессе инкубации, например, на наличие микробного роста. Традиционно в автоматизированных системах блок (или модуль) перемещения контейнеров содержит трехкоординатный манипулятор или робот X-Y-Z, выполненный с поворотным захватом для контейнеров. Изображения образцов, получаемые во время инкубации, сравнивают для определения результатов роста микроорганизмов. Необходимость периодического контроля процесса роста культур обусловлена актуальностью проблемы выявления роста микроорганизмов на ранних этапах в течение инкубационного периода, при этом периодичность контроля составляет от 1 раза в 3 часа до 1 раза в час. Однако не все известные системы обладают такой возможностью из-за ограничений, связанных с особенностями конструкции камеры инкубации и размещенного в ней механизма перемещения контейнеров. Решение данной задачи усложняется при увеличении загрузочного объема камеры инкубации до 300 контейнеров и более с периодичностью получения изображения каждого образца не менее 1 раза в час.
Наиболее близкой к заявленному изобретению является модуль перемещения контейнеров в камере инкубации в составе системы микробиологической лаборатории BD Kiestra™ ReadA™ (US11041871 B2, дата публикации: 22.06.2021, а также представленная на официальном сайте компании - правообладателя BD // URL: https://www.bd.com/en-us/products-and-solutions/products/product-families/bd-kiestra-reada, дата обращения: 28.07.2023). Камера инкубации образцов содержит окна для загрузки и выгрузки контейнеров с образцами, полки с ячейками - гнездами для размещения контейнеров, средства формирования в рабочем объеме камеры требуемого температурного режима и атмосферы с обеспечением возможности принудительной вентиляции камеры. Модуль перемещения контейнеров в рабочем объеме камеры инкубации представлен одним 3-х координатным манипулятором с захватом для контейнера, содержащим вертикальную колонну, горизонтальные направляющие, снабженные отдельными приводами перемещения.
Однако данный модуль перемещения не обеспечивает высокоинтенсивного уровня обслуживания контейнеров с биологическими образцами в рабочем объеме камеры инкубации большой вместимости, что не позволяет существенно повысить производительность и эффективность автоматизированных микробиологических систем, а также снизить время проводимого исследования при высоком потоке инкубируемых образцов. В связи с чем существует потребность в разработке высокопроизводительных устройств, обеспечивающих возможность мониторинга инкубируемых культур в процессе культивирования с автоматическим формированием цифровых изображений с заданной периодичностью.
Технической проблемой, решение которой обеспечивается при осуществлении/использовании настоящего изобретения, является разработка модуля перемещения контейнеров в камере инкубации для высокопроизводительной автоматизированной микробиологической системы, устраняющей недостатки аналогов и прототипа.
Раскрытие сущности изобретения
Технический результат, обеспечиваемый изобретением при решении вышеуказанной технической проблемы, заключается в повышении производительности камеры инкубации с исключением «столкновения» захватов двух манипуляторов в зоне окна для загрузки и выгрузки контейнеров.
Технический результат достигается модулем перемещения контейнеров в камере для инкубации биологических образцов, содержащей окно для загрузки и выгрузки контейнеров, где упомянутый модуль включает два 3-х координатных манипулятора с захватом для контейнера, каждый из которых содержит колонну вертикального перемещения захвата, горизонтальные направляющие и поворотный стол, снабженные приводами перемещения, при этом манипуляторы расположены один над другим с возможностью перекрытия рабочего хода друг друга с обеспечением доступа захвата каждого манипулятора к контейнеру, размещенному в рабочем объеме камеры инкубации у окна для загрузки и выгрузки контейнеров; манипуляторы снабжены датчиками «красной зоны», выполненными с возможностью обнаружения присутствия захвата манипулятора в «красной зоне», расположенной вокруг окна для загрузки и выгрузки контейнеров, доступной для обслуживания верхним и нижним манипуляторами. Модуль перемещения контейнеров выполнен с возможностью прекращения перемещения одного манипулятора по сигналу, поступающему с блока управления, при срабатывании датчика «красной зоны» у другого манипулятора.
Трехкоординатные манипуляторы в исходном положении до начала работы могут быть расположены зеркально симметрично относительно средней горизонтальной плоскости камеры, перпендикулярной плоскости окна для загрузки и выгрузки контейнеров.
Поворотный стол трехкоординатного манипулятора предпочтительно выполнен с возможностью поворота до 400 градусов в противоположных направлениях.
3-х координатные манипуляторы предпочтительно снабжены датчиками крайнего нижнего и крайнего верхнего положения захвата манипулятора (концевыми выключателями), датчиками непрерывного контроля положения координат захвата манипулятора. При этом датчики «красной зоны» расположены между датчиками крайнего верхнего и крайнего нижнего положения захватов манипуляторов с обеспечением возможности сигнализации при приближении механизмов перемещения контейнеров в камере инкубации друг к другу. Датчики крайнего нижнего и крайнего верхнего положения захвата манипулятора и датчик «красной зоны» закреплены на колонне вертикального перемещения захвата манипулятора. Датчики «красной зоны» в одном из вариантов осуществления изобретения представляют собой индуктивные датчики, при этом расстояние между датчиками, закрепленными на колоннах манипуляторов, составляет не менее высоты окна для загрузки и выгрузки контейнеров, предпочтительно превышает высоту окна на величину до 5 см, что позволяет получать сигнал от датчика до того, как захват манипулятора приблизится к окну загрузки/выгрузки на такое расстояние, что станет возможным одновременное нахождение двух захватов в одном месте.
Захват трехкоординатного манипулятора может быть снабжен фигурными губками с накладками, выполненными с возможностью контроля усилия зажима контейнера.
Камера для инкубации биологических образцов снабжена средствами формирования в рабочем объеме камеры требуемого температурного режима и атмосферы, может быть также укомплектована дополнительными устройствами, например сканерами, блоком загрузки и выгрузки контейнеров с образцами - внутренним и внешним, а также другими устройствами в зависимости от решаемых задач. Сканеры могут быть закреплены на шлюзе над площадками модуля загрузки и выгрузки контейнеров с образцами, с возможностью считывания размещенной на контейнерах информации. Внутренний блок загрузки и выгрузки контейнеров с образцами распложен в рабочем объеме камеры инкубации и в одном из вариантов реализации включает две площадки для контейнеров, размещенные в проекции окна камеры инкубации, одна из которых предназначена для загружаемого в камеру контейнера, вторая - для выгружаемого контейнера из камеры инкубации, при этом каждая из площадок снабжена средством вертикального перемещения контейнеров в зону сканирования. Внешний блок модуля загрузки и выгрузки контейнеров с образцами снабжен транспортерами для загрузки и выгрузки контейнеров с образцами и лотками загрузки и выгрузки контейнеров. Модуль формирования цифрового изображения образцов включает цифровой оптический блок, расположенный в отдельном корпусе, который может быть выполнен сообщающимся с рабочим объемом камеры инкубации, и платформу для подачи контейнеров в цифровой оптический блок. Предпочтительным является выполнение камеры инкубации биологических образцов с двумя модулями формирования цифрового изображения образцов, при этом один из модулей размещен над окном для загрузки и выгрузки контейнеров, второй - под упомянутым окном. В предпочтительном варианте осуществления изобретения приводы манипуляторов, блока загрузки и выгрузки контейнеров, модуля формирования цифрового изображения образцов, выполнены электромеханическими.
Использование в конструкции камеры для инкубации биологических образцов модуля перемещения контейнеров в рабочем объеме камеры, содержащего два 3-х координатных манипулятора, помимо повышения производительности системы инкубации, повышает надежность работы системы за счет снижения риска прерывания ее работы из-за технических неполадок, связанных с прекращением функционирования одного из манипуляторов. Второй манипулятор служит в таких ситуациях резервным механизмом для обеспечения бесперебойной работы системы.
Камера для инкубации биологических образцов с заявленным модулем перемещения контейнеров является надежной, эргономичной, удобной в использовании и обслуживании, позволяет исследовать по сравнению с аналогами большее количество образцов в единицу времени, сокращает время, необходимое для анализа образца, снижает вероятность ошибок оператора, которые могут привести к неправильной постановке диагноза, поздней диагностике, потере или порче образцов. Кроме того, данная камера для инкубации биологических образцов с модулем перемещения контейнеров в ее составе может быть использована в системе для инкубации образцов, имеющей модульную конструкцию, или в качестве автономного устройства, работающего под управлением оператора, а также может быть легко интегрирована в автоматизированную лабораторную среду и входить в комплекс (систему) взаимосвязанных модулей по автоматизации большей части процессов микробиологических исследований.
Краткое описание чертежей
Изобретение поясняется иллюстративным материалом, где заявленный модуль перемещения контейнеров в камере для инкубации биологических образцов представлен в составе автоматизированной микробиологической лаборатории.
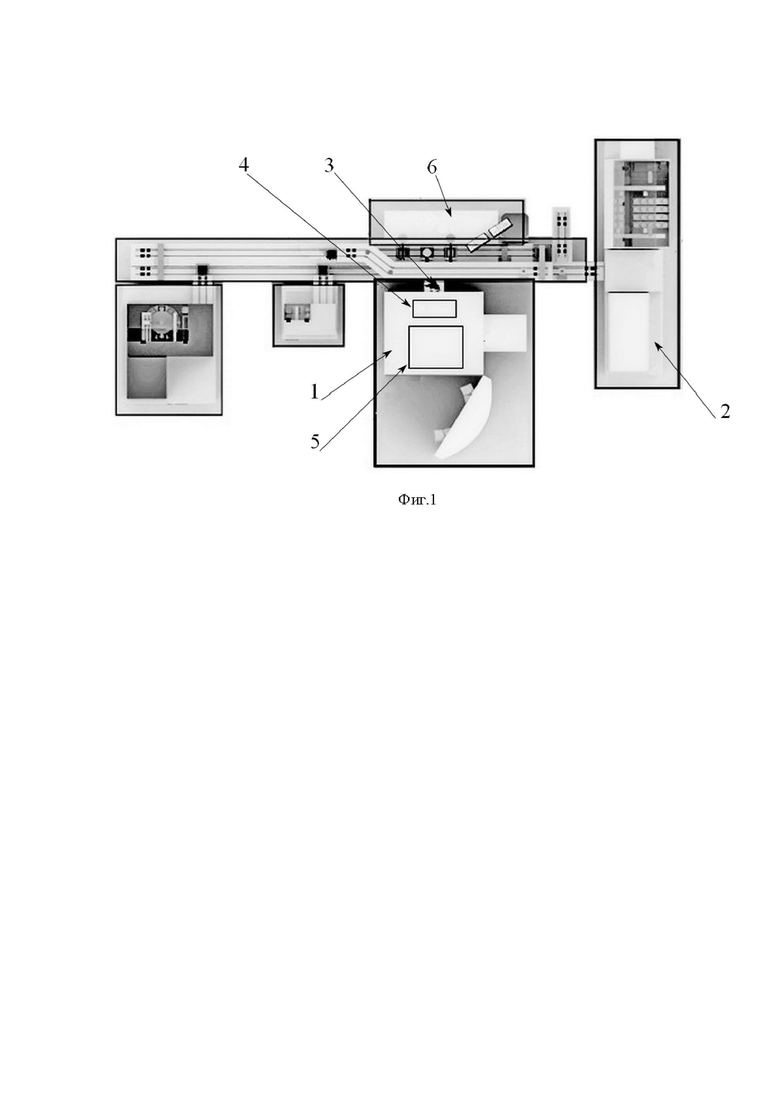
На фигуре 1 схематично представлена автоматизированная микробиологическая лаборатория, содержащая систему для инкубации и формирования цифровых изображений биологических образцов, а также модуль посева биоматериала в контейнеры, конвейерную систему, рабочее место лаборанта с ПК для проведения исследований биологических образцов, например, на резистентность к антибиотикам и т.д.; при этом система для инкубации и формирования цифровых изображений биологических образцов содержит модуль загрузки и выгрузки контейнеров с образцами, камеру инкубации с расположенными внутри нее модулем идентификации образцов (модулем сканирования образцов), модулем формирования цифрового изображения образцов (модулем фотографирования), а также модулем перемещения контейнеров в рабочем объеме камеры.
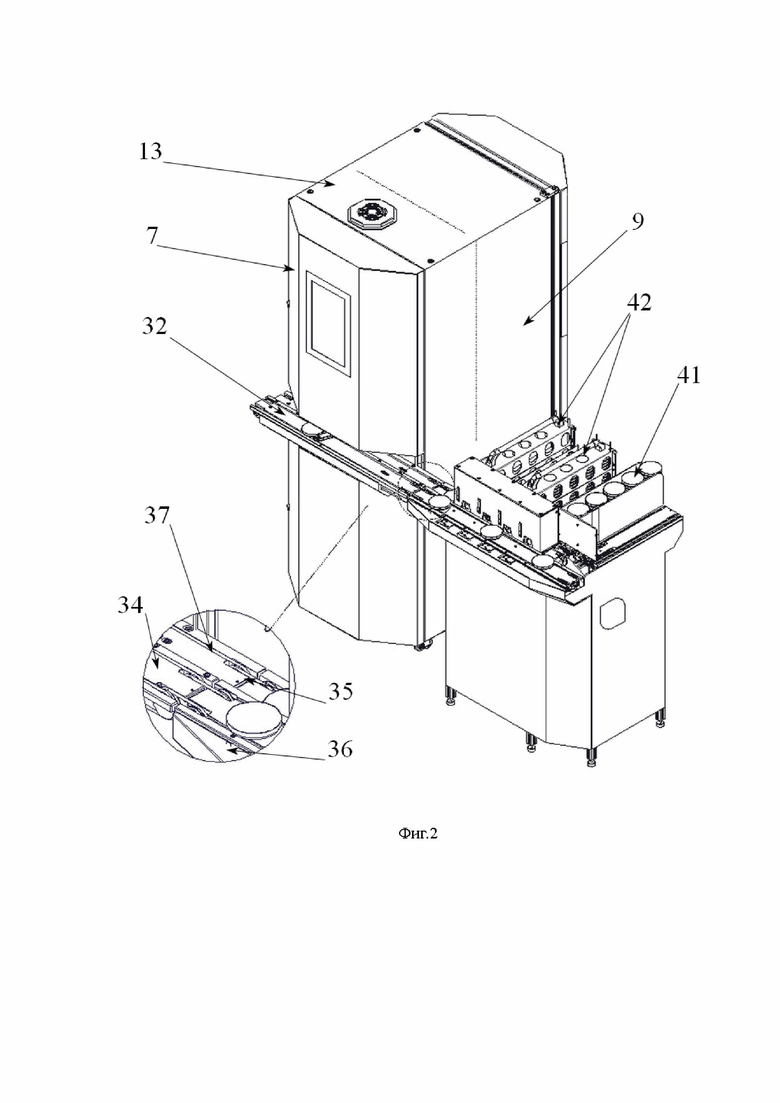
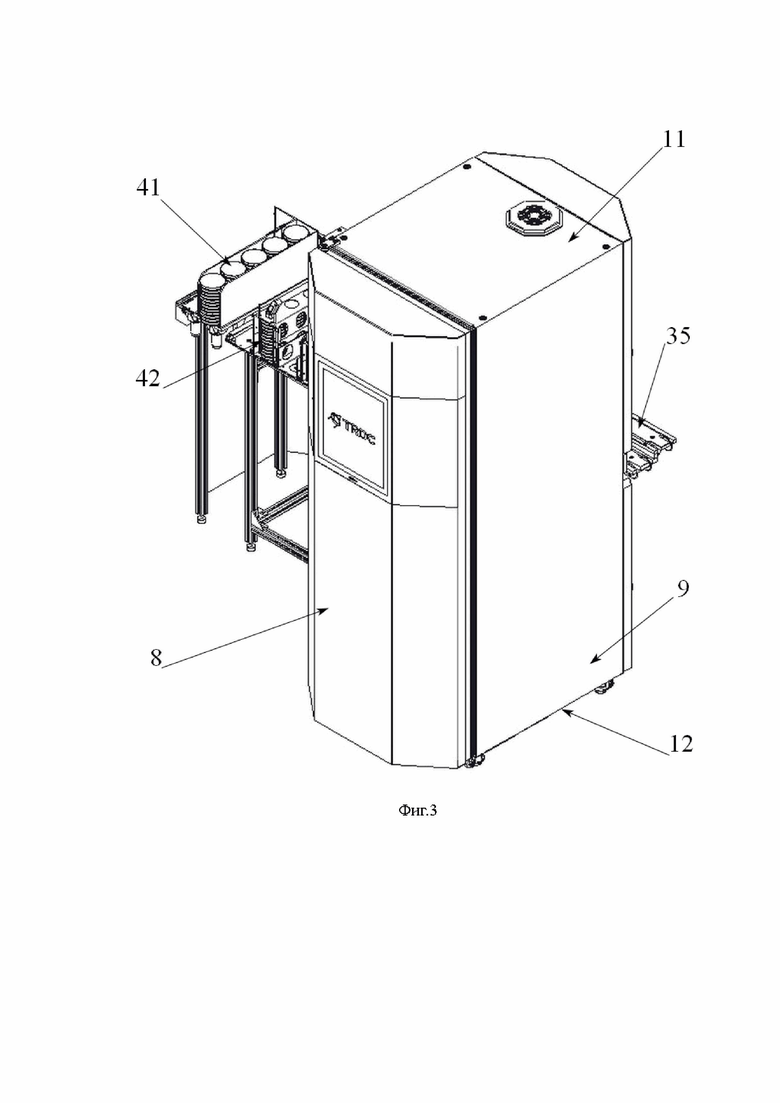
На фигурах 2 и 3 представлена камера инкубации с внешним блоком модуля загрузки и выгрузки контейнеров с образцами, общий вид со стороны передней и задней стенок, соответственно; показана внешняя конфигурация камеры инкубации и взаиморасположение камеры инкубации и внешнего блока модуля загрузки и выгрузки контейнеров с образцами (блока модуля, расположенного за пределами камеры инкубации), вариант их исполнения и область стыковки.
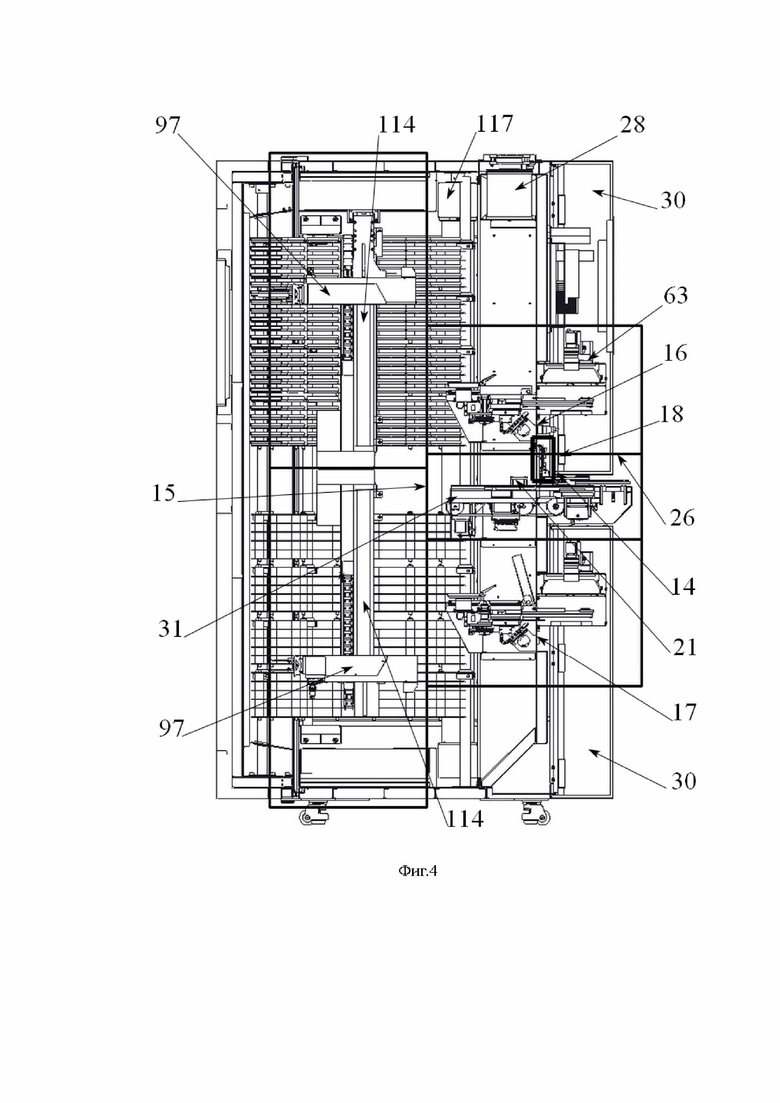
На фигуре 4 представлена камера инкубации - вид изнутри, со стороны боковой стенки; показано внутреннее устройство камеры инкубации, включая встроенные в нее элементы модуля загрузки и выгрузки контейнеров с образцами (внутреннего блока модуля, расположенного в камере инкубации, включая площадки для размещения контейнеров) и модуля перемещения контейнеров в рабочем объеме камеры.
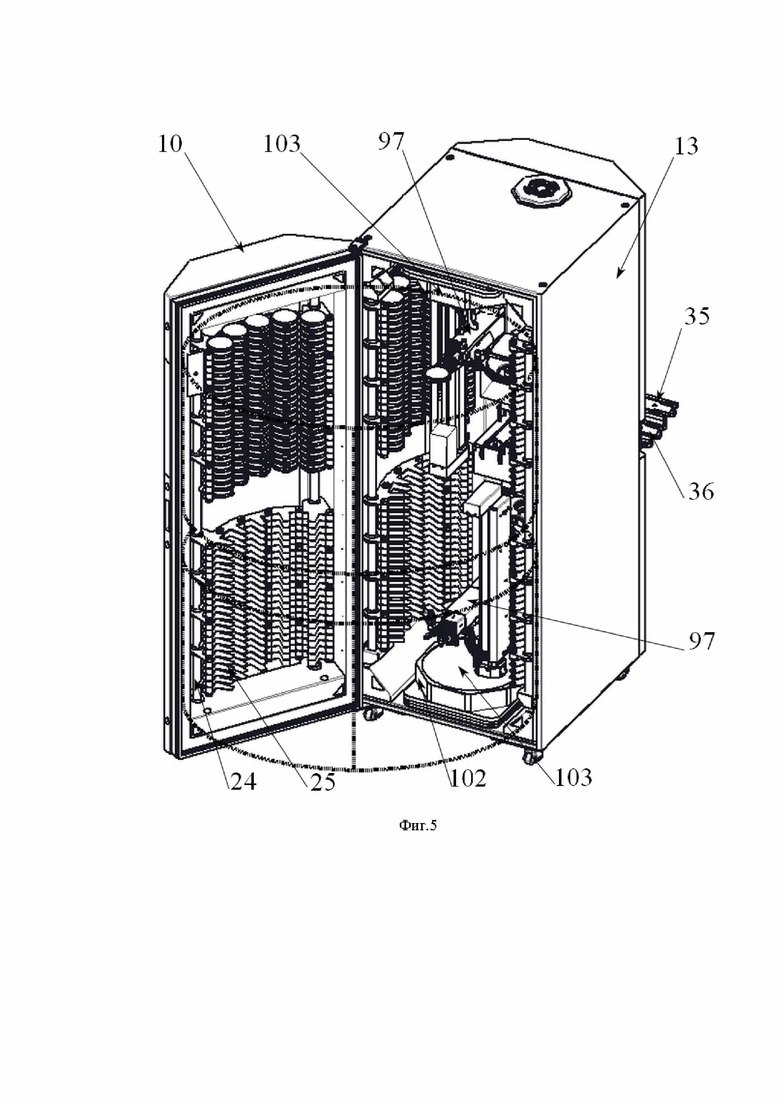
На фигуре 5 представлена камера инкубации - вид изнутри, со стороны задней стенки с дверцей; показано внутреннее устройство камеры инкубации, включая расположенные на ее боковых стенках и задней стенке с дверцей полки с ячейками (гнездами) для размещения контейнеров, сгруппированные в секции - верхние и нижние, а также представлен рабочий объем камеры инкубации и находящиеся в нем два 3-х координатных манипулятора - верхний и нижний (предназначенные для обслуживания соответствующих секций с ячейками), модуль перемещения контейнеров в рабочем объеме камеры.
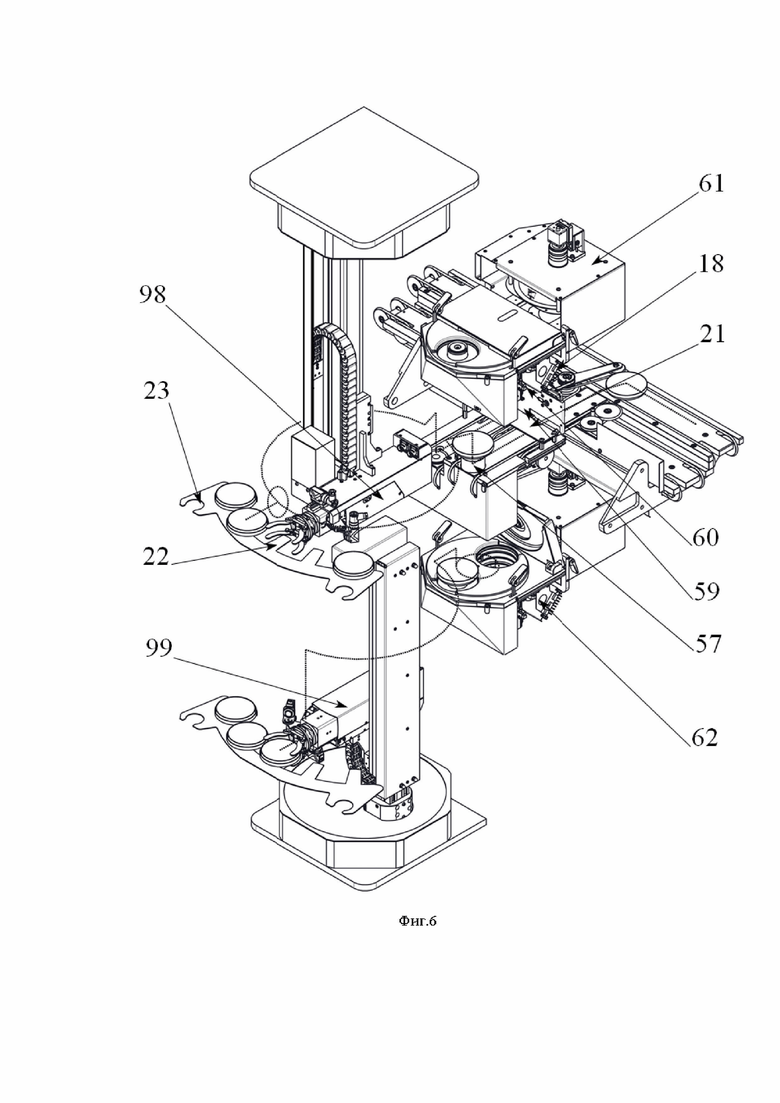
На фигуре 6 представлено конструктивное решение расположенных в камере инкубации модулей, общий вид со стороны задней стенки с дверцей вне корпуса камеры; показаны модуль перемещения контейнеров в рабочем объеме камеры, отдельные конструктивные элементы модуля загрузки и выгрузки контейнеров с образцами, модуль формирования цифрового изображения (модуль фотографирования) образцов; показано их взаимное расположение и отражена конструктивная связь элементов, а также схема перемещения контейнера с образцом по указанным модулям.
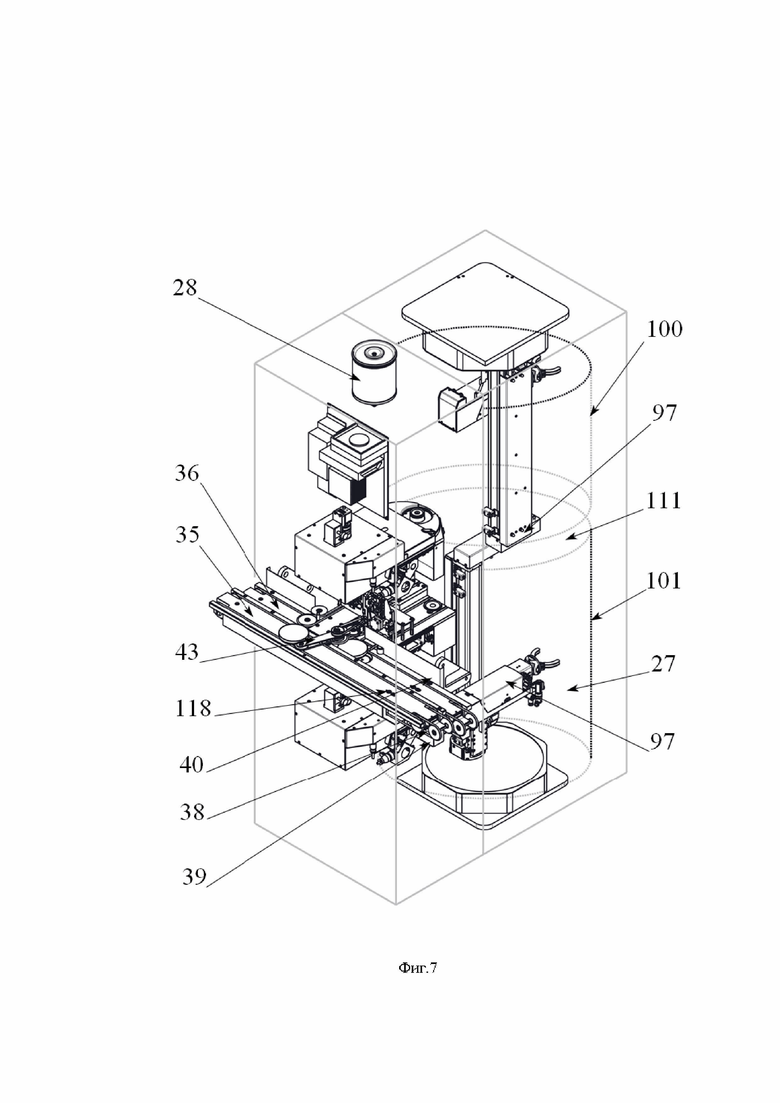
На фигуре 7 представлено конструктивное решение расположенных в камере инкубации модулей, общий вид со стороны передней стенки с условно обозначенными стенками камеры; показаны модуль загрузки и выгрузки контейнеров с образцами (с внутренним блоком и транспортерами для загрузки и выгрузки контейнеров внешнего блока) и находящиеся внутри камеры инкубации модуль формирования цифрового изображения образцов (модуль фотографирования) и модуль перемещения контейнеров в рабочем объеме камеры.
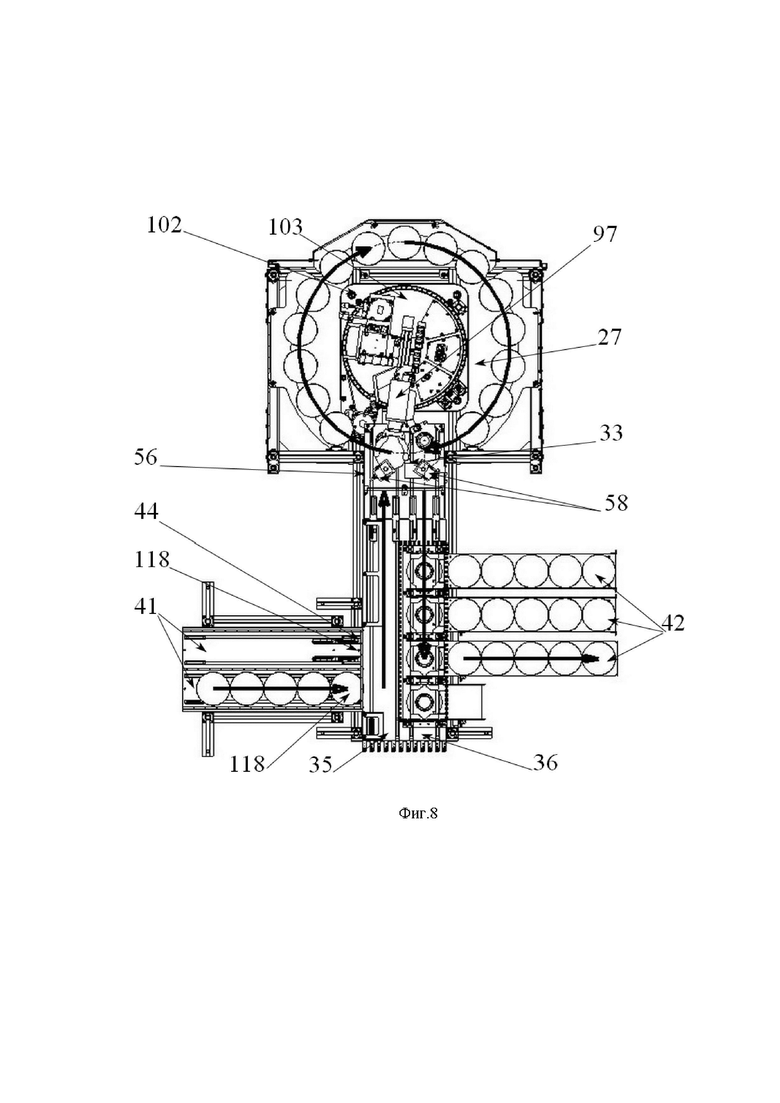
На фигуре 8 представлена камера инкубации с модулем загрузки и выгрузки контейнеров - вид сверху; показан вариант размещения и порядок перемещения контейнеров с образцами, включая направление движения контейнеров с образцами по транспортеру для загрузки контейнеров в камеру инкубации и по транспортеру для выгрузки контейнеров из камеры инкубации, показана траектория движения 3-х координатного манипулятора в рабочем объеме камеры в горизонтальной плоскости камеры.
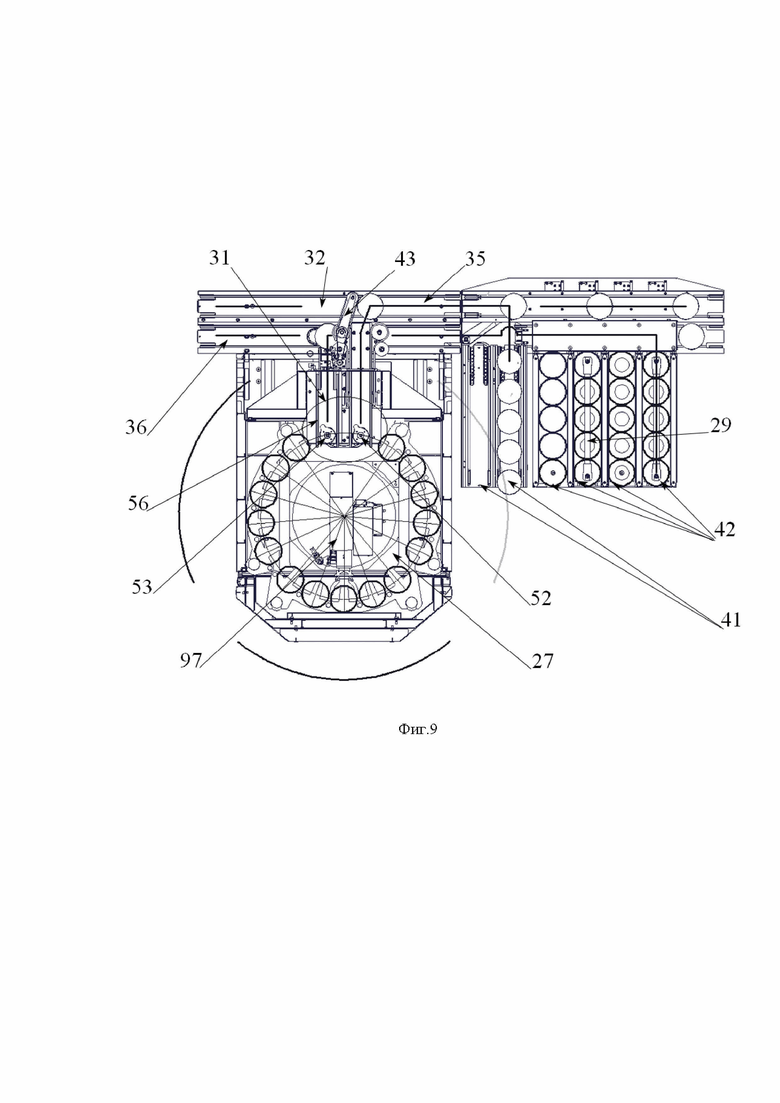
На фигуре 9 представлена камера инкубации с модулем загрузки и выгрузки контейнеров - вид сверху; показан другой вариант размещения транспортеров внешнего блока модуля загрузки - выгрузки контейнеров с образцами относительно камеры инкубации.
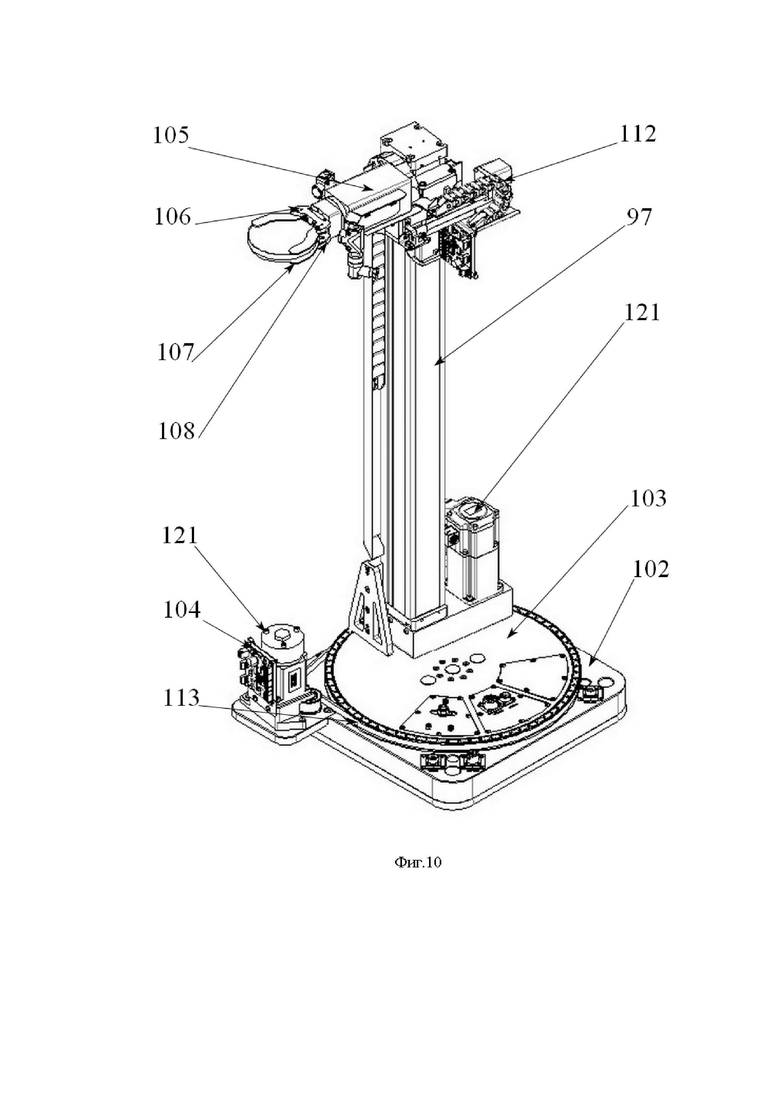
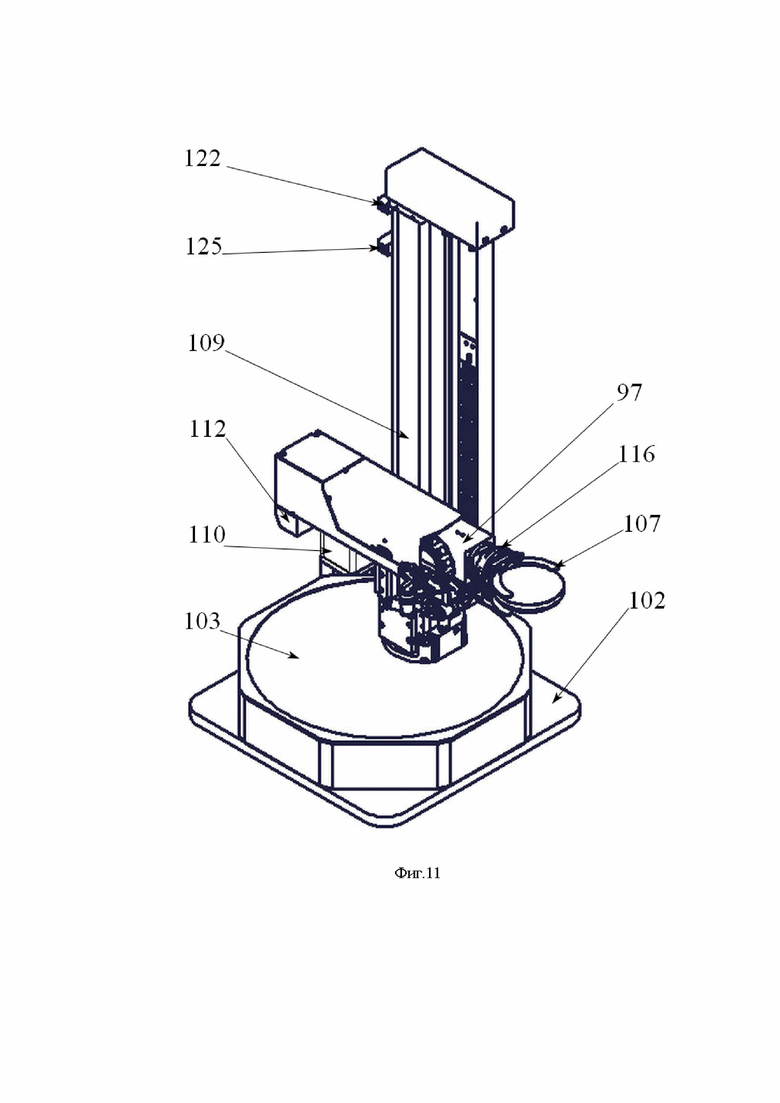
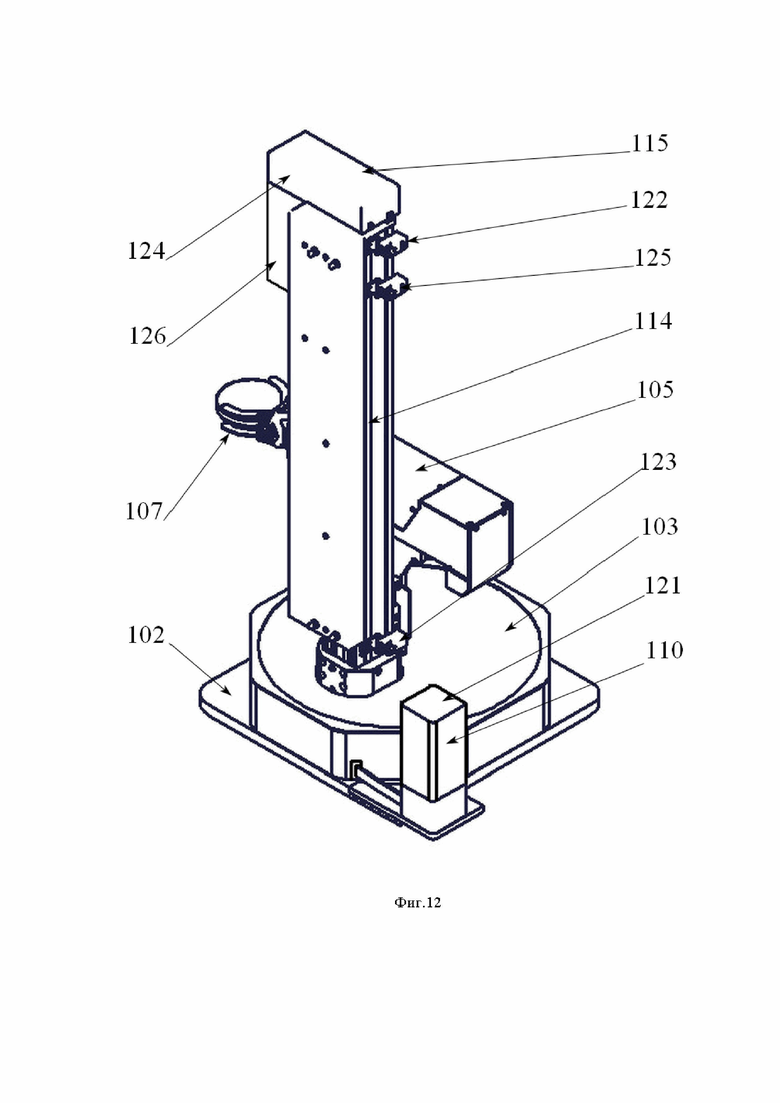
На фигурах 10, 11, 12 представлен общий вид 3-х координатного манипулятора модуля перемещения контейнеров в рабочем объеме камеры, виды: справа с расположением захвата манипулятора в верхнем положении, слева с расположением захвата манипулятора в нижнем положении, и сзади, соответственно.
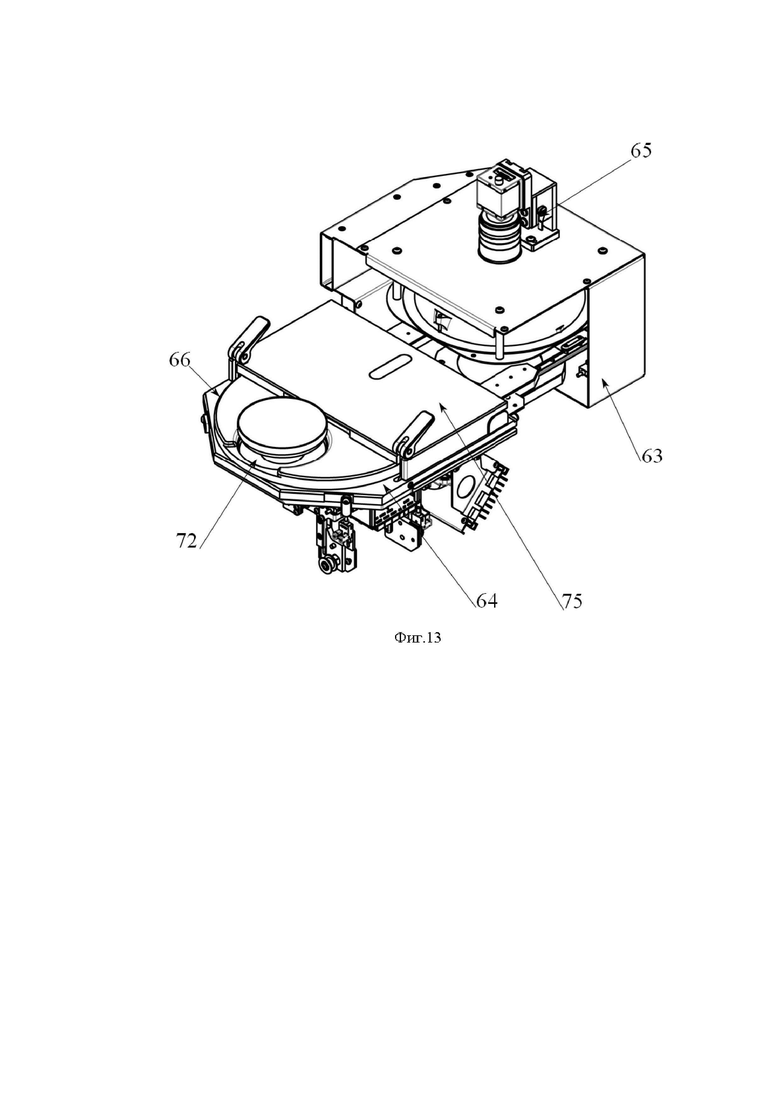
На фигурах 13, 14 представлен модуль формирования цифрового изображения (модуль фотографирования) образцов, общий вид, вид сбоку, соответственно.
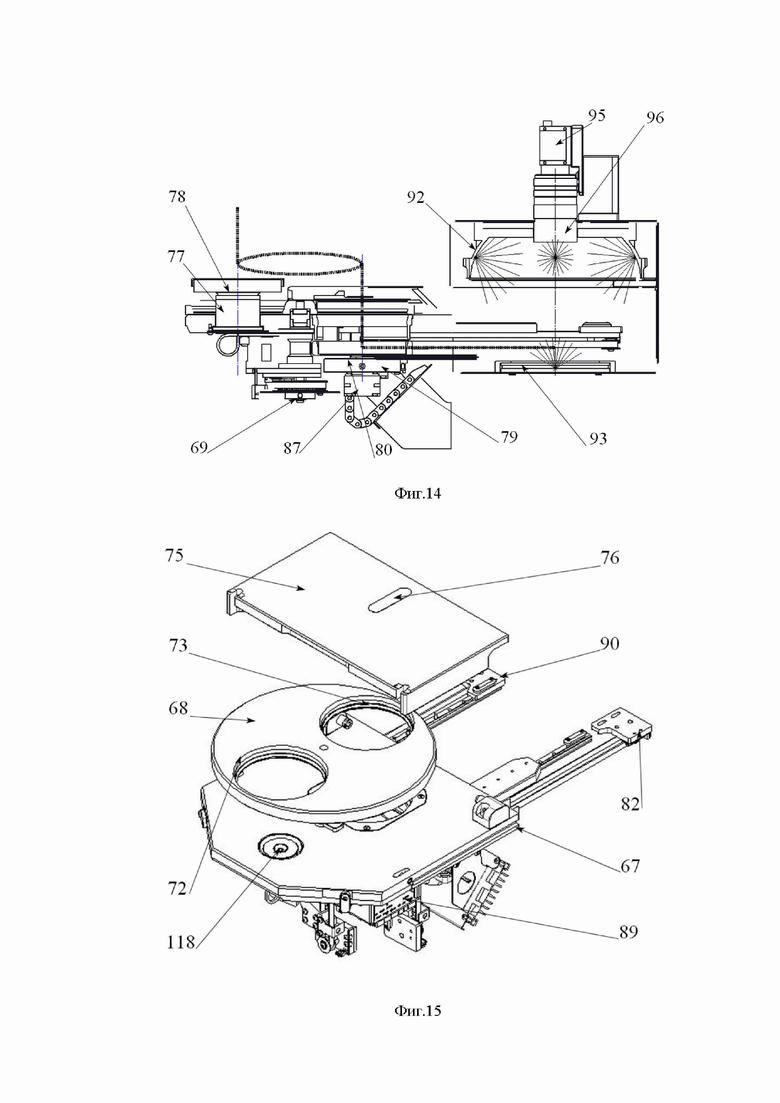
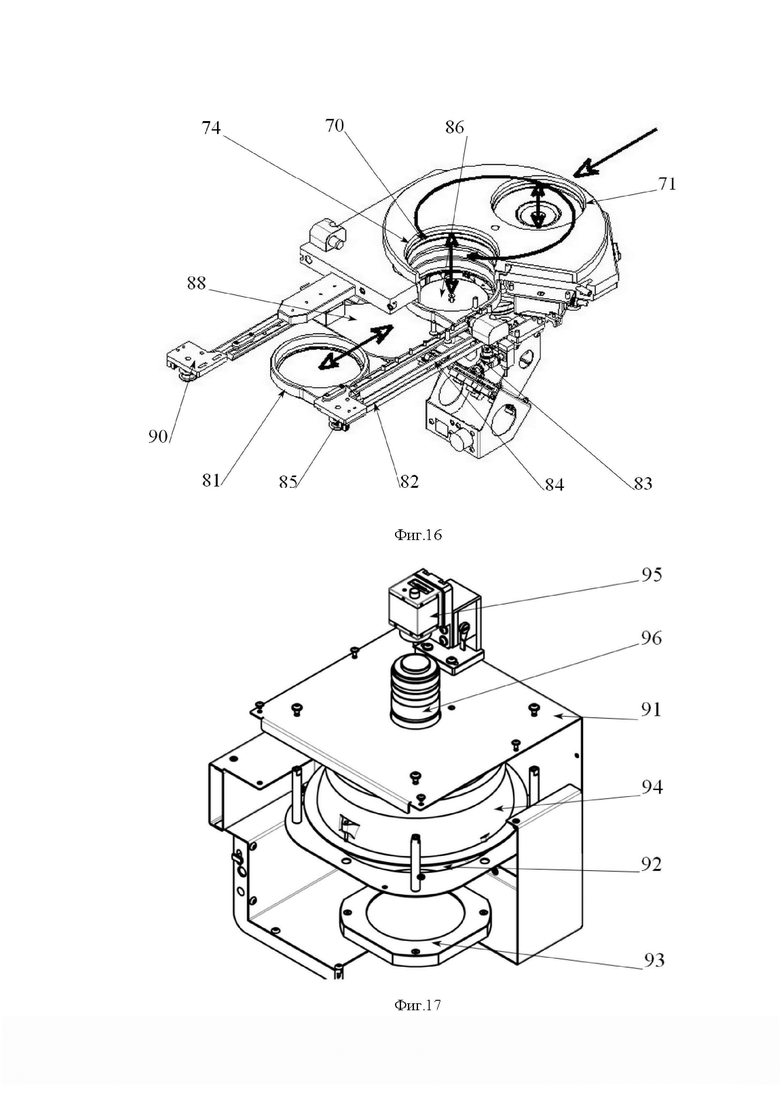
На фигурах 15, 16 представлен узел перемещения контейнеров модуля формирования цифрового изображения (модуля фотографирования) образцов, вид спереди, вид сзади с указанием направления движения его отдельных элементов, соответственно.
На фигуре 17 представлен узел формирования цифрового изображения (цифровой оптический блок) модуля формирования цифрового изображения (модуля фотографирования) образцов, расположенный в зоне фотографирования.
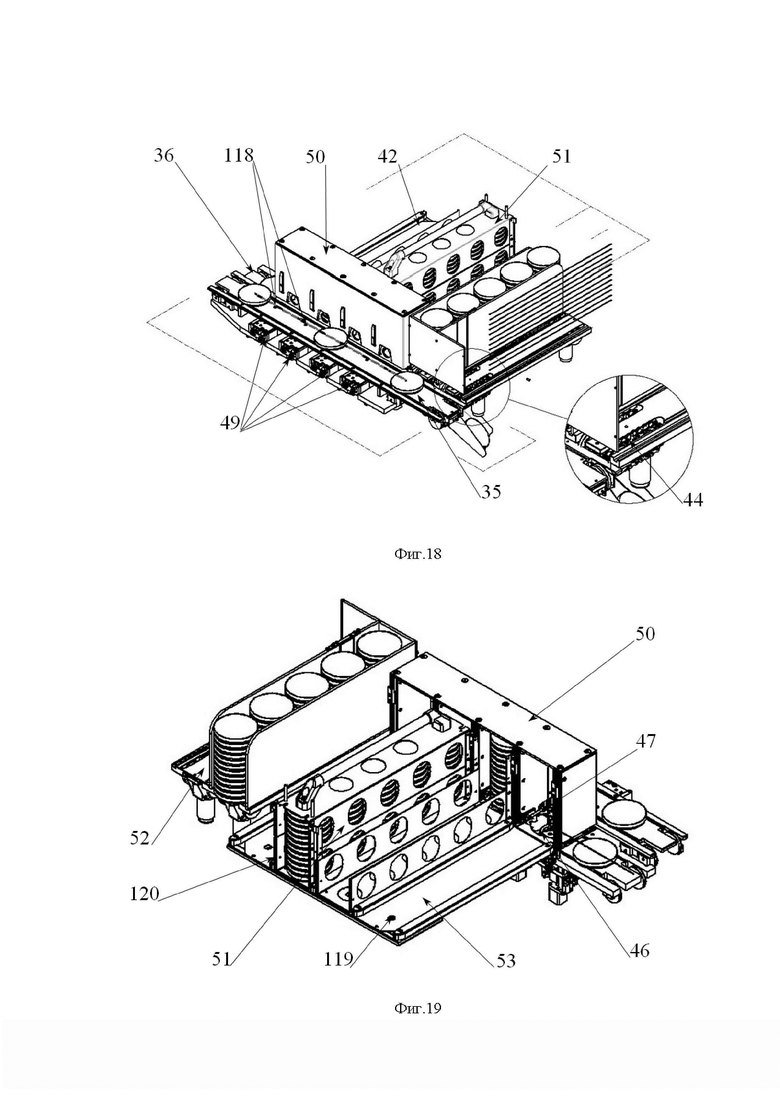
На фигурах 18, 19 представлен общий вид внешнего блока модуля загрузки и выгрузки контейнеров с образцами, виды сзади и спереди, соответственно.
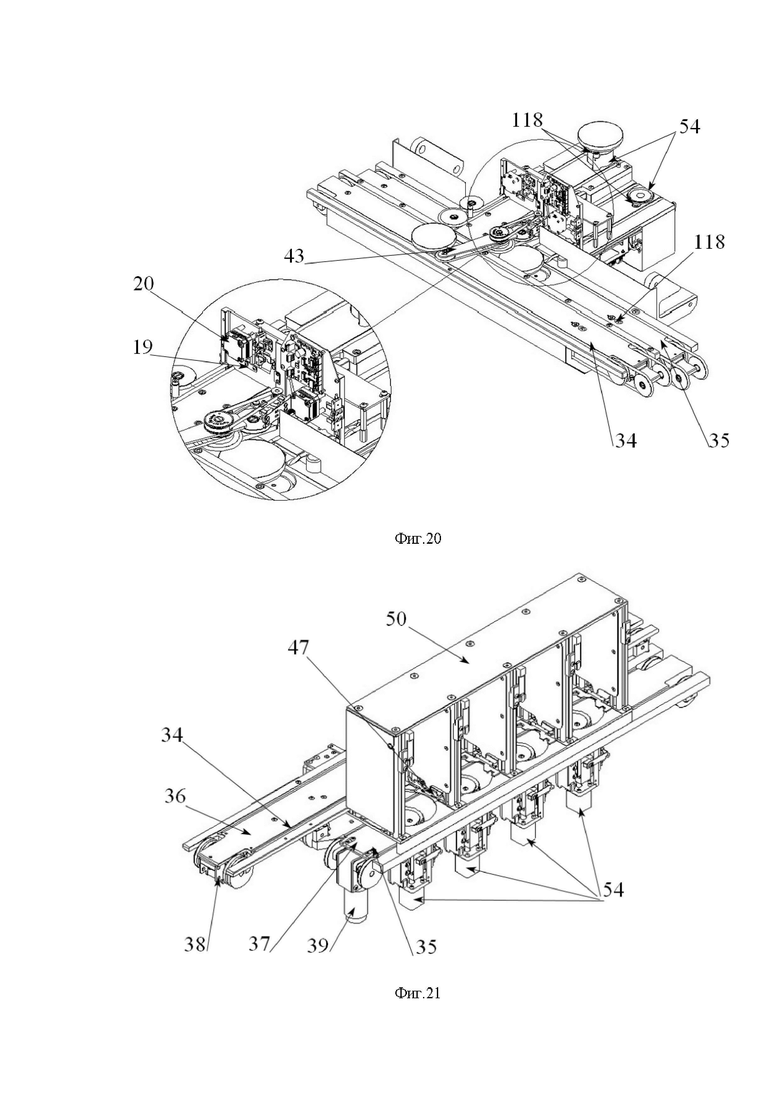
На фигуре 20 представлена детализация внешнего блока модуля загрузки и выгрузки контейнеров с образцами; показаны транспортер загрузки контейнеров в камеру инкубации, шлюз, содержащий створку с приводом, и поворотная створка, направляющая контейнер от транспортера к шлюзу, общий вид со стороны размещения транспортеров.
На фигуре 21 представлена детализация внешнего блока модуля загрузки и выгрузки контейнеров с образцами; показаны транспортер выгрузки контейнеров, бокс выгрузки и лотки выгрузки контейнера после окончания инкубации - общий вид со стороны размещения лотков.
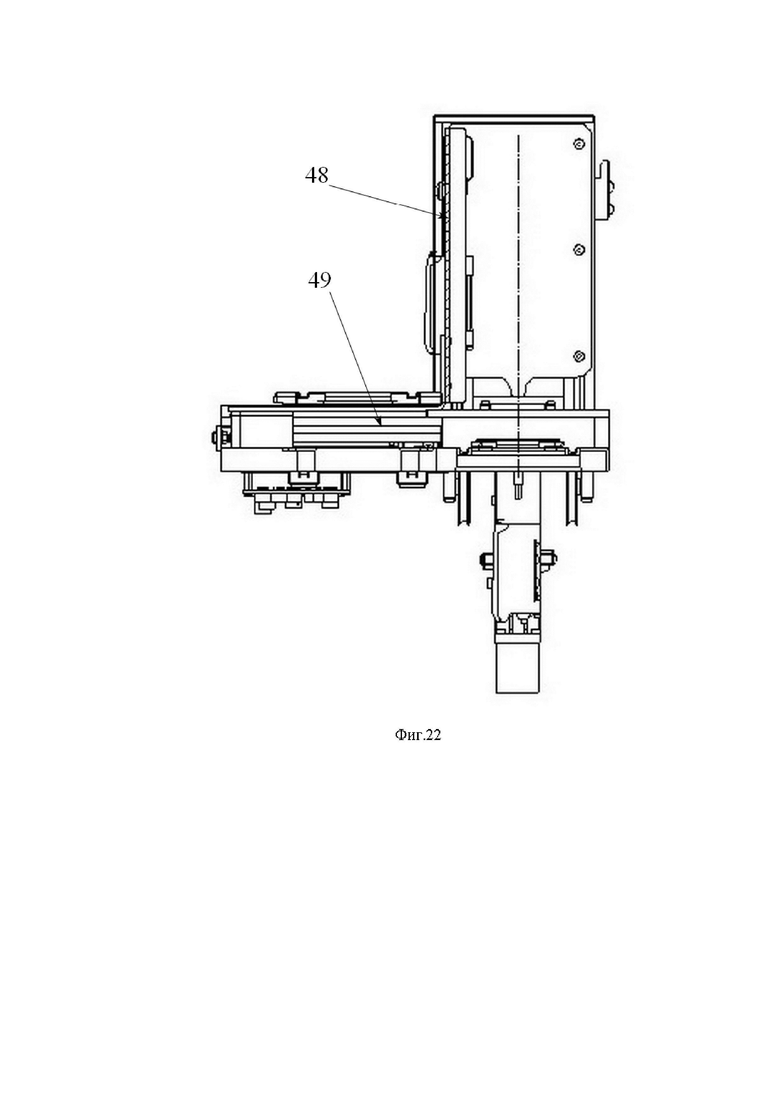
На фигуре 22 представлен вид с торца в разрезе на транспортеры загрузки и выгрузки и крайний лоток, показан горизонтальный толкатель и его привод.
На фигуре 23 представлен детальный вид части лотка выгрузки контейнера, сопряженной с транспортером выгрузки внешнего блока модуля загрузки и выгрузки контейнеров с образцами.
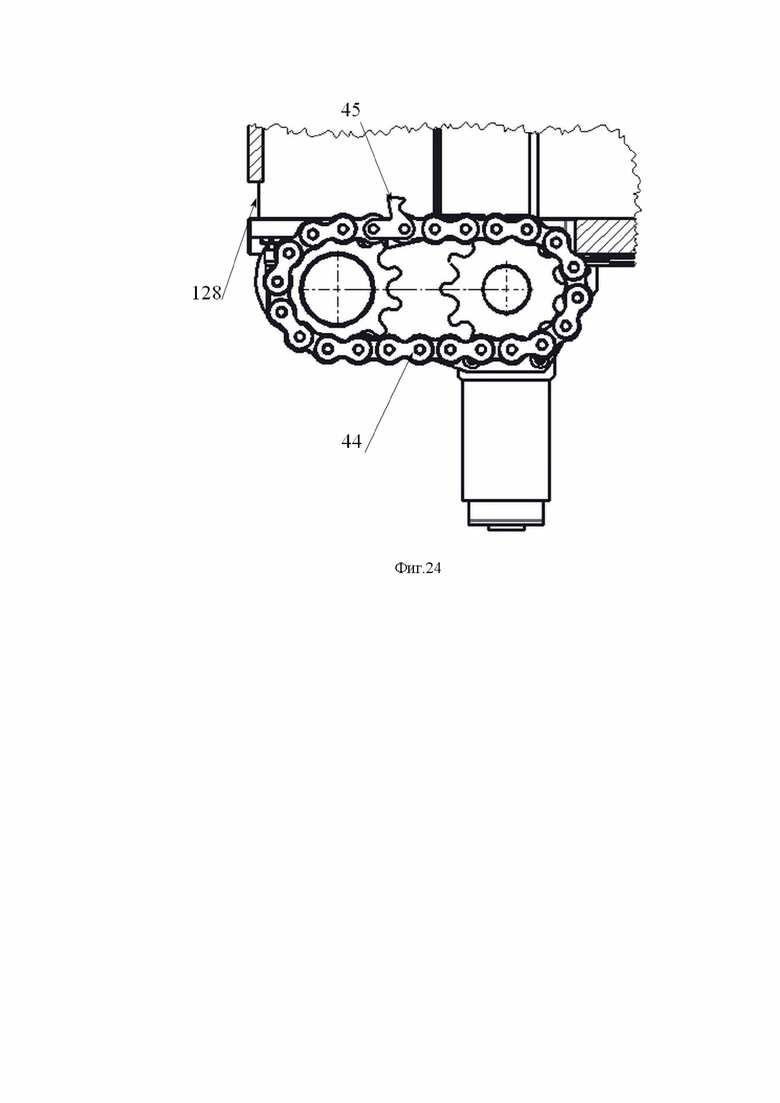
На фигуре 24 представлен детальный вид цепного транспортера лотка загрузки, внешнего блока модуля загрузки и выгрузки контейнеров с образцами; цепной транспортер обеспечивает поочередную подачу контейнеров из стопки на транспортер загрузки.
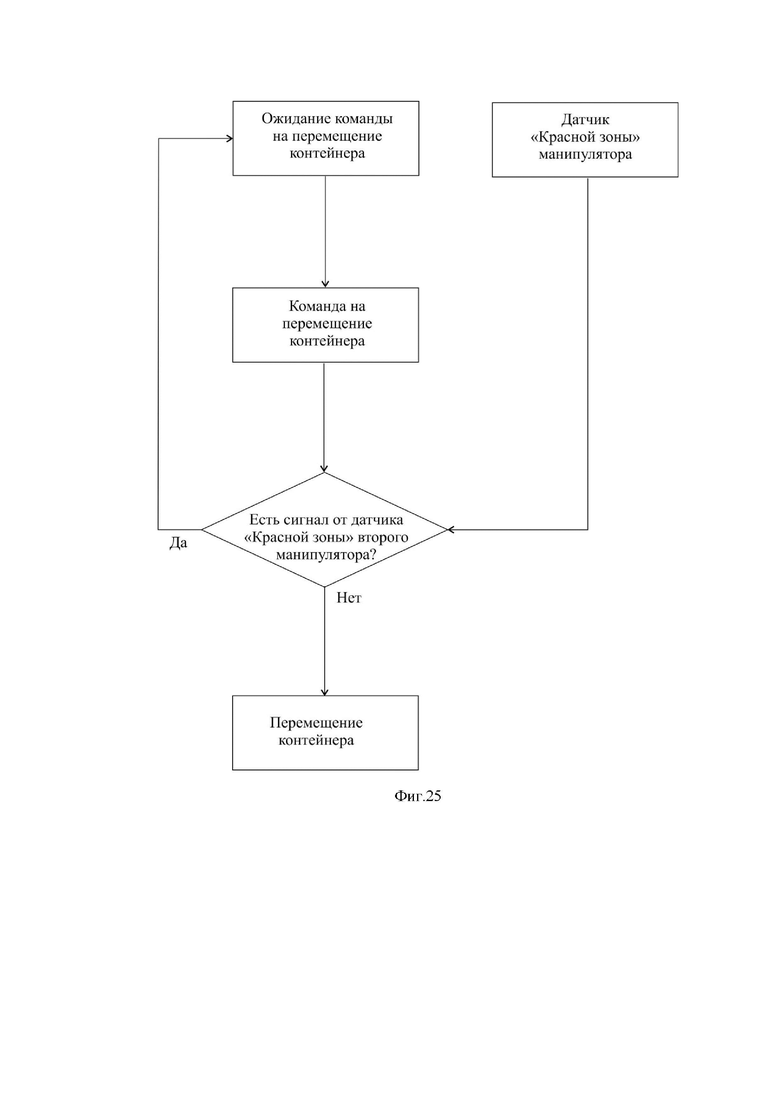
На фигуре 25 представлена блок-схема алгоритма работы блока управления манипуляторами.
Позициями на чертежах обозначены следующие блоки и модули системы: 1 - камера инкубации, 2 - модуль загрузки и выгрузки контейнеров с образцами, 3 - модуль идентификации образца (модуль сканирования), 4 - модуль формирования цифрового изображения образцов (модуль фотографирования), 5 - модуль перемещения контейнеров в рабочем объеме камеры, 6 - блок управления.
Камера инкубации содержит следующие конструктивные элементы: 7 - передняя стенка, 8 - задняя стенка, 9 - боковая стенка, 10 - дверца, 11 - крыша камеры, 12 - днище камеры, 13 - корпус камеры, 14 - окно для загрузки и выгрузки контейнеров, 15 - проекция окна для загрузки и выгрузки контейнеров, 16 - верхнее окно для связи с модулем 4, 17 - нижнее окно для связи с модулем 4, 18 - шлюз, 19 - привод шлюза, 20 - створка шлюза, 21 - площадка для монтажа сканеров, 22 - ячейка (гнездо) для размещения контейнеров, 23 - полка с ячейками (гнездами), 24 - штанга для ярусного крепления полок с ячейками, 25 - секция полок с ячейками, 26 - средняя горизонтальная плоскость камеры, 27 - рабочий объем (или рабочая зона) камеры, 28 - средства формирования температурного режима, атмосферы, 29 - лоток для ручного извлечения контейнера, 30 - отсек для размещения модуля фотографирования.
Модуль загрузки и выгрузки контейнеров с образцами содержит: 31 - первый (внутренний) блок модуля 2, расположенный в рабочем объеме камеры инкубации, 32 - второй (внешний) блок модуля 2, расположенный за пределами камеры инкубации, 33 - общая зона загрузки-выгрузки. Внешний блок 32 содержит: 34 - транспортер для загрузки контейнеров в камеру инкубации, 35 - транспортер для выгрузки контейнеров из камеры инкубации, 36, 37 - основания транспортера, 38, 39 - приводы транспортера, 40 - стопор для фиксации контейнера, 41 - лоток обычной или приоритетной загрузки контейнера, 42 - лоток выгрузки контейнера, 43 - устройство переноса контейнера (поворотная створка), 44 - цепной транспортер, 45 - захват цепного транспортера, 46 - стопор лотка выгрузки, 47 - створка лотка, 48 - горизонтальный толкатель, 49 - привод горизонтального толкателя, 50 - бокс выгрузки, 51 - кассета. Внутренний блок 31 содержит: 52 - площадка для размещения загружаемых в камеру контейнеров, 53 - площадка для размещения выгружаемых из камеры контейнеров, 54 - средство вертикального перемещения контейнеров (лифт), 55 - привод лифта, 56 - зона сканирования, 57 - средство вращения контейнера.
Модуль 3 идентификации образца (модуль сканирования) содержит: 58 - устройство для идентификации (считывания машиночитаемой метки) контейнеров (сканер), 59 - платформу (кронштейн), 60 - средство подсветки.
Модуль 4 формирования цифрового изображения биологических образцов (модуль фотографирования) содержит: 61 - верхний модуль фотографирования, 62 - нижний модуль фотографирования, 63 - корпус модуля 4, 64 - узел перемещения контейнера (узел перемещения), 65 - узел формирования цифрового изображения (цифровой оптический блок), 66 - опорная платформа для подачи контейнеров в цифровой оптический блок 69, 67 - паз опорной платформы, 68 - поворотный диск, 69 - электродвигатель, 70 - коническая поверхность ячейки (гнездо) поворотного диска, 71 - выступ поворотного диска, 72 - входная ячейка (гнездо), 73 - ячейка (гнездо) передачи контейнера на фотографирование, 74 - опорная поверхность ячеек для крышки контейнера, 75 - откидная крышка узла перемещения, 76 - канал откидной крышки, 77 - первый лифт 51 в модуле 4, 78 - площадка первого лифта 72, 79 - второй лифт 51 в модуле 4, 80 - площадка второго лифта 74, 81 - транспортировочная корзина, 82 - направляющие рельсы транспортировочной корзины 76, 83 - привод транспортировочной корзины, 84 - средство перемещения транспортировочной корзины в горизонтальной плоскости, 85 - площадка средства перемещения, 86 - столик лифта, 87 - привод вращения столика, 88 - шторка, 89 - привод шторки, 90 - направляющие рельсы шторки, 91 - верхняя часть корпуса цифрового оптического блока, 92 - верхний светильник цифрового оптического блока, 93 - нижний светильник цифрового оптического блока, 94 - рассеиватель, 95 - цифровая фотокамера, 96 - объектив фотокамеры.
Модуль перемещения контейнеров в рабочем объеме камеры содержит: 97 - 3-х координатный манипулятор, 98 - верхний манипулятор, 99 - нижний манипулятор, 100 - зона верхнего манипулятора, 101 - зона нижнего манипулятора, 102 - опорная платформа манипулятора, 103 - поворотный стол платформы, 104 - привод поворотного стола, 105 - захват манипулятора, 106 - головка захвата, 107 - фигурные губки захвата, 108 - накладки захвата, 109 - колонна вертикального перемещения захвата (колонна), 110 - привод колонны, 111 - красная зона, 112 - горизонтальный привод перемещения захвата, 113 - ременная передача, 114 - вертикальная ось, 115 - привод вертикальной оси, 116 - привод поворота захвата.
Набор датчиков содержит: 117 - датчики контроля температуры, влажности и состава среды, 118 - датчик наличия контейнера, 119 - датчик заполнения стопки и лотка, 120 - индуктивный датчик наличия кассеты, 121 - датчик углового положения, 122 - датчик крайнего верхнего положения захвата, 123 - датчик крайнего нижнего положения захвата, 124 - датчик непрерывного контроля положения координат захвата манипулятора, 125 - датчик красной зоны, 126 - датчик положения привода вертикальной оси трехкоординатного манипулятора, 127 - датчик конечного положения привода лотка выгрузки .
Осуществление изобретения
Далее представлено более подробное описание заявленного изобретения, демонстрирующего возможность осуществления модуля перемещения контейнеров в камере для инкубации биологических образцов в составе системы для инкубации и формирования цифровых изображений биологических образцов.
В настоящем описании использованы следующие термины, определения и сокращения.
«Система для инкубации и формирования цифровых изображений биологических образцов» при описании заявленного изобретения может иметь сокращенное название - система, система для инкубации, система инкубации, автоматизированная система.
«Контейнер» - емкость, в которой возможно размещение исследуемого образца, в том числе посредством ручной и/или автоматической инокуляции. Емкость, в которую может быть помещен образец, обычно содержит субстрат или среду с питательными веществами для роста целевых микроорганизмов. Согласно настоящему изобретению, в автоматизированной системе для проведения исследований могут быть использованы такие контейнеры, как чашки Петри (далее также - чашки), содержащие высеянную среду, пробирки с бульоном и предметные стекла с биологическими образцами и др.
«Биологический образец» (далее также - образец) - образец жидкости и (или) ткани организма человека, а также любой другой материальный образец, потенциально содержащий микробиологические объекты, взятый для проведения лабораторного исследования.
Термином «зона» при описании заявленного изобретения обозначена определенная область пространства, в которой реализуется предписанная функция устройства, модуля, блока, или их частей или отдельных конструктивных элементов, которая может иметь материальные или условные границы.
«Красная зона» - область пространства в камере инкубации, в которой возможно столкновение (соударение) манипуляторов.
«Рабочий объем камеры инкубации» или «Рабочая зона камеры инкубации» - объем в камере инкубации, в котором осуществляется инкубирование образцов и непосредственная работа находящихся в ней устройств, модулей и их частей.
Камера для инкубации с модулем перемещения контейнеров и система на ее основе могут быть реализованы в виде самостоятельных решений, обеспечивающих возможность инкубирования контейнеров с образцами в оптимальных условиях и формирования цифровых изображений образцов в режиме реального времени с заданной (или необходимой) периодичностью (например, каждые 60 минут) с последующим анализом врачом или лаборантом полученных изображений, в т.ч. с использованием соответствующего программного обеспечения. Программное обеспечение может содержать алгоритмы, основанные на использовании искусственного интеллекта.
Камера для инкубации с модулем перемещения контейнеров и система на ее основе могут быть интегрированы в структуру микробиологической лаборатории (фиг. 1), в которой также могут присутствовать модули и/или блоки автоматического посева биоматериала в контейнеры, например, такие как чашки Петри, с функцией загрузки контейнеров в кассеты, маркировки контейнеров; подготовки образцов для микрофлюидных тестов; отбора колоний; определения резистентности к антибиотикам и т.д.
Система для инкубации и формирования цифровых изображений биологических образцов (фиг. 1 - 25) содержит:
- камеру 1 инкубации образцов, размещенных в контейнерах (далее также - камера инкубации, камера),
- модуль 2 загрузки и выгрузки контейнеров с образцами,
- модуль 3 идентификации образца с использованием датчиков и сканеров, для контроля местоположения и идентификации конкретной чашки Петри (далее также - модуль идентификации, модуль сканирования),
- два модуля 4 формирования цифровых изображений образцов 4 (далее также - модуль фотографирования),
- модуль 5 перемещения контейнеров в рабочем объеме камеры, включающий два 3-х координатных манипулятора 97 для перемещения контейнеров с образцами в модуль фотографирования 4 и их обратной загрузки в камеру инкубации 1,
- блок управления 6 с функцией управления перемещениями 3-х координатных манипуляторов 97 (далее также - блок управления).
Далее представлено подробное описание конструктивного решения каждого блока и модуля и продемонстрирована работа камеры инкубации и системы на ее основе на примере использования в качестве контейнеров чашек Петри, которое не ограничивает объем заявленных притязаний.
Камера инкубации 1 (фиг. 2-5, 7) представляет собой корпус по типу шкафа. Камера может содержать металлический каркас, облицованный с внешней и внутренних сторон. Камера выполнена утепленной, с внутренней стороны может быть облицована панелями из нержавеющей стали. В рабочем объеме 27 камеры расположены полки 23 с ячейками (гнездами) 22 для размещения чашек Петри с биологическими образцами, как показано, например, на фиг.5. В камере между стенками камеры и рабочим объемом, где установлены стеллажи для размещения контейнеров, размещены инженерные системы для создания в ее рабочем объеме оптимальных условий для роста микроорганизмов, включая средства формирования требуемого режима инкубации (средства нагрева, увлажнения, поддержания концентрации СО2 и циркуляции воздуха) 28 рабочего объема (фиг. 4). Камера инкубации может быть снабжена датчиками 117 контроля температуры, влажности, состава среды, и средствами, обеспечивающими возможность поддержания требуемых параметров в автоматическом режиме.
В одном из вариантов осуществления изобретения камера 1 выполнена в виде корпуса 13, имеющего переднюю 7, заднюю 8, боковые 9 стенки, крышу 11 и днище 12 (фиг. 2 и 3). Камера снабжена дверцей 10 (фиг. 5) для ее обслуживания, а также, по меньшей мере, одним окном 14 для загрузки и выгрузки контейнеров с биологическими образцами и двумя окнами - верхним 16 и нижним 17, для связи с двумя модулями 4 формирования цифрового изображения образцов (модулями фотографирования) (фиг. 4). При этом окно для загрузки и выгрузки контейнеров 14 выполнено в передней стенке 7 камеры 1 предпочтительно в ее средней части, а дверца 10 камеры 1 - со стороны ее задней стенки 8. В одном из вариантов осуществления изобретения задняя стенка 8 может быть выполнена в виде дверцы, как показано на фиг. 3, 5. При этом дверца и передняя стенка могут иметь выпуклый профиль внешней поверхности. Выпуклая форма передней стенки камеры позволяет осуществить скрытый монтаж элементов модуля загрузки-выгрузки. Окно для загрузки и выгрузки контейнеров 14 снабжено шлюзом 18 (фиг. 4), выполненным с возможностью ограничения утечки среды из камеры инкубации, который открывается на время загрузки контейнера в камеру инкубации или выгрузки из нее по сигналу с соответствующего датчика 118, расположенного на транспортере загрузки 34 с внешней стороны камеры или на транспортере выгрузки 35 с внутренней стороны камеры и связанного с блоком управления 6. Блок управления 6 после получения сигнала с датчика 118 направляет соответствующий сигнал на привод 19 шлюза 18 - сигнал на открытие или закрытие шлюза 18. Таким образом, шлюз 18 открывается автоматически, а контейнер с образцом перемещается с помощью устройства 43 с внешнего конвейера на внутреннее устройство модуля загрузки и выгрузки 2. Устройство 43 может быть выполнено в виде поворотной створки, расположенной на основании транспортера загрузки вне камеры инкубации перед шлюзом, и приводящееся в действие аналогично шлюзу по сигналу от датчика 118 наличия контейнера перед шлюзом (фиг. 7, 9 и 20). Для отслеживания перемещения образца в рабочем объеме 27 камеры 1 в режиме реального времени может быть использовано программное обеспечение, при этом контейнер с образцом снабжен машиночитаемой меткой (например, штрих-кодом, меткой RFID, и т.д.), а камера 1 (как минимум, в месте входа контейнера, месте выхода контейнера и модулях фотографирования 4, как показано на фиг. 8) снабжена соответствующими считывающими устройствами для этой метки (сканерами 58). После выгрузки контейнеров из камеры инкубации на транспортер 35 образцы могут быть отправлены на утилизацию, могут быть переданы в специальный лоток для ручного извлечения 29 оператором или могут быть автоматически перемещены в следующий модуль или прибор. В одном из вариантов осуществления камеры инкубации 1 для загрузки и выгрузки контейнеров могут быть использованы отдельные окна со своими шлюзами, или шлюз может быть выполнен из двух перемещающихся независимо друг от друга частей.
Помимо первого окна - окна для загрузки и выгрузки контейнеров 14, на передней стенке 7 также расположены второе и третье окна - верхнее окно 16 и нижнее окно 17 для связи с модулями 61 и 62 формирования цифрового изображения образцов. При этом окно 16 расположено над окном 14, а третье окно 17 - под окном 14 (фиг. 4). Такое расположение окон 16 и 17 для связи с модулем 4 относительно окна 14 позволяет модулям фотографирования 61 и 62 функционировать независимо друг от друга. При этом перемещение чашек в рабочем объеме 27 камеры 1 осуществляется с использованием соответствующего трехкоординатного манипулятора 98 или 99, обслуживающего свой модуль фотографирования и общую зону загрузки-выгрузки 33 (об этом подробнее далее).
В различных вариантах осуществления изобретения корпус камеры инкубации 13 может иметь отдельные отсеки 30 для размещения верхнего 61 и нижнего 62 модулей фотографирования (как показано на фиг. 4, 7). Предпочтительным является размещение модулей фотографирования в отдельных отсеках с внешней стороны камеры инкубации 1, как показано на фиг. 2, 4, 7. При этом расстояние между упомянутыми отсеками не должно быть менее высоты окна для загрузки и выгрузки контейнеров 14.
Размещение полок 23 с ячейками 22 может быть реализовано различными способами. Каждая ячейка 22 приспособлена для приема и удержания в ней контейнера с образцом в процессе инкубации. Предпочтительным является размещение полок 23 по окружности (как показано на фиг. 5) для обеспечения доступа захвата 105 трехкоординатного манипулятора 97 к ее ячейкам. Массив полок 23 с ячейками 22 для хранения чашек с образцами в предпочтительном варианте выполнения образует частично цилиндр с виртуальной вертикальной осью (фиг. 5, 7). Такое расположение полок 23 делает ячейки 22 доступными для захватов манипуляторов 105, размещенных в центральной части цилиндра (фиг. 7), образованного полками 23 с ячейками 22. Полки 23 с ячейками 22 в одном из вариантов осуществления изобретения могут быть закреплены с внутренней стороны боковых стенок 9, задней стенки 8 и/или дверцы 10 камеры 1 (фиг. 5). При этом указанные стенки камеры инкубации с закрепленными на них полками 23 могут иметь частично цилиндрический профиль поверхности. Предпочтительным является выполнение стенок камеры с прямолинейным профилем внешней поверхности, при этом с внутренней стороны стенок 7 - 9 и дверцы 10 закреплены вертикальные штанги 24, обеспечивающие ярусное крепление округлых полок с ячейками под чашки Петри. Камера инкубации 1 может включать различное количество ячеек в зависимости от задач микробиологической лаборатории, например, от 600 до 720 ячеек. В отдельных вариантах осуществления изобретения каждая ячейка характеризуется координатами ее пространственного местоположения. Полки 23 с ячейками 22 могут быть выполнены в камере инкубации 1 в виде секций 25.
Модуль загрузки и выгрузки контейнеров с образцами 2 (фиг. 1 - 4, 8, 9, 18 - 24) содержит два блока, один из которых расположен в камере инкубации - первый блок 31 (или внутренний блок) (фиг. 4, 7, 8, 9, 20), второй - за пределами рабочего объема камеры инкубации - второй блок 32 (или внешний блок) (фиг. 2, 7, 8, 9, 18, 19, 20). Внешний блок 32 имеет два конвейера (транспортера) 34 и 35, расположенные на разных высотных уровнях на основаниях 36 и 37, которые могут быть жестко соединены с корпусом камеры инкубации 13. Конвейеры (транспортеры) 34 и 35 выполнены с возможностью перемещения во встречных направлениях и оснащены независимыми электроприводами 38 и 39 (фиг. 7). Один из конвейеров (транспортеров) транспортирует контейнеры с образцами от лотков загрузки 41 (фиг. 8, 9, 18, 19) к шлюзу 18 - транспортер для загрузки контейнеров в камеру инкубации 34, а второй - от шлюза 18 к лоткам выгрузки 42 - транспортер для выгрузки контейнеров из камеры инкубации 35. На протяжении конвейера (транспортера) 34 и 35 могут (в зависимости от алгоритма использования системы инкубации: индивидуального или в составе комплекса) быть расположены оптические датчики наличия контейнеров 118 и стопоры 40 для фиксации контейнера в заданном пространственном положении, приводимые в движение электромагнитами (фиг. 2, 7, 20). Стопоры 40 могут быть реализованы как выдвижные штифты, перемещающиеся при подаче питания на электромагниты и возвращающиеся в исходное положение при снятии питания под действием пружины. Стопоры расположены на транспортере таким образом, чтобы расстояние между ними было приблизительно равно 0,75 от диаметра контейнера для обеспечения его надежной остановки. Перед шлюзом 18 транспортера загрузки 34 и после шлюза 18 транспортера выгрузки 35 с внешней стороны камеры 1 расположены устройства 43 (поворотные створки) (как показано на фиг. 7, 9, 20), обеспечивающие перемещение контейнера с транспортера загрузки 34 к шлюзу 18 или от шлюза 18 на транспортер выгрузки 35 с изменением траектории движения контейнера, например, поворотом на 90 градусов.
На транспортер загрузки 34 контейнеры поступают из лотков загрузки 41 (фиг. 8, 9, 18, 19), количество которых может варьироваться в зависимости от вместимости камеры инкубации - от двух и более. Лотки загрузки могут быть выполнены в виде емкости или корпуса, имеющего, по меньшей мере, две параллельно расположенные боковые стенки, закрепленные на основании. В одном из вариантов выполнения лотков загрузки они дополнительно снабжены торцевой стенкой со стороны сопряжения с транспортером 34 для загрузки контейнеров в камеру инкубации, при этом торцевая стенка снабжена щелью 128 или расположена с отступом от основания с обеспечением прохождения на транспортер нижнего контейнера из стопки. Щель может быть выполнена высотой на 3-4 мм больше высоты контейнера. В качестве основания может выступать опорная поверхность, предназначенная для размещения лотков 41. Лотки загрузки сконфигурированы под габариты используемых контейнеров. При использовании в качестве контейнеров, например, чашек Петри, лотки загрузки выполнены с возможностью размещения в них чашек Петри в один ряд по горизонтали и, по меньшей мере, два ряда по вертикали, при этом боковые стенки для чашек Петри выступают в качестве направляющих. В конкретном варианте выполнения (фиг. 19) лотки загрузки 41 имеют прямоугольную конфигурацию и габариты, обеспечивающие размещение в них одной чашки Петри по ширине, не менее 10 чашек по высоте и до 5 стопок из чашек по длине. Лотки предпочтительно оснащены оптическими датчиками наличия контейнеров 118 для определения приоритетов подачи контейнеров на транспортер в зависимости от алгоритма использования системы инкубации. Для поочерёдной выдачи контейнеров на транспортер лотки 41 могут быть оснащены цепным транспортером 44, как показано на фиг. 18 и 24, с двумя парами захватов 45, выполненных с возможностью взаимодействия с чашками Петри при перемещении, при этом одна пара захватов выталкивает контейнер на транспортер загрузки 34, а вторая - фиксирует контейнер из следующей стопки от преждевременной выдачи на транспортер.
Блок 31, расположенный в камере инкубации, содержит две площадки 52 и 53 для размещения контейнеров, расположенных в проекции окна камеры инкубации 15 (фиг. 8 и 9), одна из которых - площадка 52, предназначена для загружаемого в камеру контейнера, вторая - площадка 53, предназначена для размещения выгружаемых из камеры инкубации контейнеров 53, при этом каждая из площадок 52 и 53 снабжена средством вертикального перемещения контейнеров (лифтами) 54 (фиг. 23) с электроприводами и винтовой передачей в зону сканирования 56, средством вращения контейнера 57 в поле зрения сканера 58 для его идентификации (фиг. 6, 8, 9). Контейнер попадает в камеру инкубации через окно камеры 14, оснащенное шлюзом 18, имеющим 2 независимые створки 20, приводимые в движение своими электроприводами 19 и открывающимися по сигналам с датчиков присутствия (наличия) контейнера 118 перед шлюзом 18. От шлюза 18 до лифта 54, предназначенного для загрузки, и от лифта 54, предназначенного для выгрузки, до шлюза 18 контейнер транспортируется независимыми конвейерами (транспортерами) 34 и 35, движущимися во встречных направлениях и приводимых в действие независимыми электроприводами 38 и 39. С внутренней стороны шлюза 18 закреплена площадка 21 для монтажа сканеров (фиг. 4).
После выгрузки контейнера из камеры инкубации контейнер по транспортеру выгрузки 35 может направляться в бокс выгрузки 50 (фиг. 18, 19) который является приёмной частью лотка выгрузки контейнеров 42, которые могут иметь конфигурацию, аналогичную лоткам для загрузки контейнеров 41. Каждый лоток 42 имеет стопоры 46 (фиг. 19), выполненные аналогично стопорам 40 и закрепленные на транспортере под соответствующим лотком выгрузки, оптические датчики наличия контейнера 118 на транспортере 35, лифт 54 (фиг. 22) для перемещения контейнера с транспортера 35 в лоток выгрузки 42, створки 47, пропускающие контейнер при перемещении лифтом 54 вверх и блокирующие обратное перемещение контейнера, горизонтальный толкатель 48 для штабелирования стопок контейнеров в лоток 42 и датчики заполнения стопки и лотка 119. Контейнер, достигнув выдвинутых стопоров 46, останавливается, поскольку расстояние между стопорами меньше размера контейнера. Расположенный между стопорами датчик наличия контейнера 118 формирует сигнал на остановку транспортера и поднятие контейнера лифтом в стопку, формируемую в выходном лотке. Створки 47 представляют собой пластины, закрепленные на противоположных стенках лотка с возможностью поворота вокруг горизонтальной оси пластины на угол 90 градусов, при этом в исходном положении (без контейнера) створки расположены в горизонтальной плоскости над транспортером, и имеют конфигурацию, обеспечивающую формирование окна, размер которого меньше диаметра контейнера, при этом больше диаметра площадки лифта, на котором он расположен. Такое выполнение створок обеспечивает перемещение через упомянутое окно контейнера из нижнего положения в верхнее с помощью лифта, при этом створки «открываются» при их повороте из горизонтального положения в верхнее вертикальное положение при воздействии на них стенками контейнера, и после достижения контейнером заданной высоты, при которой створки «закрываются», занимая исходное горизонтальное положение, формируя, тем самым, опорную площадку, на которой размещается контейнер при перемещении лифта из крайне верхнего положения в крайнее нижнее положение. Таким образом, контейнер, поднимается лифтом выше створок и уже не может опуститься ниже створок. Стопка контейнеров формируется при поочередном вертикальном перемещении контейнеров, где каждый последующий контейнер «встраивается» в стопку снизу с одновременным перемещением вверх уже размещенных на створках контейнеров. Таким образом, стопка формируется по одному контейнеру. Горизонтальный толкатель 48 представляет собой шибер с профилем, близким к профилю контейнера, перемещающийся поступательно в горизонтальной плоскости по направляющим, расположенным по боковым сторонам лотка, и выталкивающий стопку контейнеров в лоток. В лотки 42 могут быть установлены кассеты для приема отработанных контейнеров 51, также лотки могут иметь индуктивные датчики 120 наличия кассет. Лифт 54 и горизонтальный толкатель 48 имеют собственные электроприводы 55 и 49 и датчики конечных положений 128. Использование того или иного лотка определяется алгоритмами работы системы инкубации.
Модуль идентификации образца (модуль сканирования) 3 (фиг. 8, 9) включает в себя не менее двух сканеров 58 штрих-кодов, расположенных с внутренней стороны шлюза 18 камеры инкубации 1, закрепленных на кронштейне или платформе, соединенной с основанием внутреннего транспортера от шлюза до лифта в камере инкубации 59, и средства подсветки 60 сканируемой области, закрепленные на кронштейне или платформе, которые могут быть выполнены в виде светодиодных светильников. Каждый контейнер с образцом заранее маркирован, например, при помощи штрих-кода. Сканер 58 расположен с возможностью проведения идентификации контейнера с образцом при загрузке и выгрузке путем чтения и расшифровки этого кода. В альтернативном варианте исполнения система инкубации может быть оснащена системой считывания радиометок (RFID или NFC).
Модуль формирования цифровых изображений образцов (модуль фотографирования) 4 (фиг. 4-7, 13-17) включает узел перемещения контейнера 64 и узел формирования цифрового изображения (цифрового оптического блока) 65 (фиг. 13). При этом узел 64 размещен в рабочем объеме камеры инкубации (фиг. 4), а узел 65 размещен в отдельном отсеке 30 камеры инкубации или отдельном корпусе 63, который примыкает к камере инкубации 1 с внешней стороны и сообщается с рабочим объемом камеры инкубации 27 через соответствующее окно (верхнее окно 16 и нижнее окно 17 для связи с модулем 4). Таким образом, контейнер с образцом может быть перемещен из рабочего объема камеры 1 с помощью узла 64 в цифровой оптический блок 65. Контейнеры для образцов подаются в цифровой оптический блок 65 через упомянутое окно 16 или 17.
Узел перемещения контейнера 64 (фиг. 13, 15, 16) включает неподвижную опорную платформу 66, под которой расположены электродвигатели 69, транспортирующие контейнер к узлу формирования цифрового изображения 65 и от него, и расположенный на платформе поворотный диск 68, выполненный с возможностью перемещения контейнера от входной ячейки 72 к ячейке передачи на фотографирование 73, и верхнюю откидную крышку 75, закрывающую диск 68. Крышка 75 находится в закрытом положении при работе инкубатора и не препятствует вращению диска совместно с контейнером. Опорная платформа 74 имеет пазы 67 (фиг. 13, 15) для установки и закрепления в корпусе камеры инкубации 13 с помощью кронштейнов, закрепленных на стенках корпуса с его внутренней стороны для размещения в упомянутых пазах. Под входной ячейкой 72 расположен приемный лифт 77 со своим электроприводом 55, ременной передачей 113, площадкой 78 для размещения контейнера в нем и с оптическим датчиком наличия контейнера 118 на лифте, который за счет большего диаметра отверстия в диске, чем диаметр лифта, может перемещаться выше уровня платформы и диска в зону досягаемости 3-координатного манипулятора 97, устанавливающего контейнер на лифт или снимающего контейнер с лифта. Таким образом, лифт перемещается выше платформы 66 для приема контейнера, а затем, приняв контейнер, перемещает его на уровень платформы 66. Как показано на фиг. 13, 15, 16, поворотный диск 68 оснащен своим электродвигателем 69 с ременной передачей 113 и имеет 2 ячейки, каждая из которых выполнена с внутренней поверхностью 70 конической формы для размещения контейнера, исключающей его застревание в ячейке в процессе перемещения, что позволяет менять местами контейнер, находящийся в приемной (входной) ячейке 72, и контейнер, находящийся в ячейке передачи на фотографирование 73. Также диск 68 имеет выступ 71, выполненный с возможностью фиксации крышки контейнера (чашки Петри) при перемещении контейнера ниже уровня диска 68 при передаче контейнера на фотографирование. Крышка контейнера может фиксироваться как механически, опираясь на выступ в диске, так и при помощи создания разрежения над крышкой через специальный канал 76 в откидной крышке узла перемещения контейнеров 75.
Под ячейкой передачи на фотографирование 73 (фиг. 13, 15 и 16) ниже уровня платформы 66 расположена транспортировочная корзина 81 с электродвигателем, ременной передачей и направляющими рельсами 82 для перемещения контейнера под объектив 96 фотокамеры 95, лифт 79 (аналогичный по своему устройству лифту 54 и лифту 77) с электродвигателем, ременной передачей для перемещения контейнера ниже уровня платформы 66 в корзину 81, площадкой 80 для размещения контейнера в указанном лифте, сканер 58 для идентификации контейнера, привод вращения 87 столика 86 лифта для перемещения контейнера в поле зрения сканера 58, шторка 88 с электродвигателем, ременной передачей и направляющими рельсами 90, перемещающаяся под объектив 96 фотокамеры 95 для формирования изображений на темном или светлом фоне.
Цифровой оптический блок 65 (фиг. 4, 14) размещен снаружи камеры инкубации 1 и сообщается с узлом перемещения контейнеров 64 через окно 16 или 17, выполненное по форме направляющих рельс привода корзины 83 и привода шторки 89. Цифровой оптический блок (фиг.17) размещен в своем корпусе 63, примыкающем к корпусу камеры инкубации с внешней стороны, и, по меньшей мере, два источника света или светильника (верхний 92 и нижний 93), расположенные с обеспечением равномерного освещения размещенного в контейнере биологического образца. Светильники выполнены с рассеивателями 94 цилиндрической, конической, параболической или сферической формы, что позволяет направлять свет на контейнер с образцом и цифровую фотокамеру 95, установленную в верхней части корпуса цифрового блока 91. При этом объектив камеры 96 расположен в отверстии, выполненном в корпусе, над площадкой для размещения контейнера с образцом для фотографирования, соосно верхнему и нижнему светильникам. Фокусировка камеры 95 может осуществляться как вручную, так и при помощи отдельного электропривода.
Модуль перемещения контейнеров в рабочем объеме камеры инкубации 5 (фиг. 6-8, 10-12) содержит два 3-х координатных манипулятора 97, которые расположены в камере один над другим с возможностью обслуживания каждым манипулятором своей зоны - верхней (зона верхнего манипулятора 100) и нижней (зона нижнего манипулятора 101), соответственно - верхний манипулятор 98 и нижний манипулятор 99. При этом верхний манипулятор 98 обеспечивает перемещение контейнеров между окном загрузки и выгрузки контейнеров 14, верхним модулем фотографирования 61 и соответствующими (верхними) ячейками камеры инкубации; нижний манипулятор 99 обеспечивает перемещение контейнеров между окном загрузки и выгрузки контейнеров 14, нижним модулем фотографирования 62 и соответствующими (нижними) ячейками камеры инкубации. Перемещение манипуляторов 98 и 99 в модуле 5 может быть реализовано независимо друг от друга в соответствии с управляющими программами.
Каждый манипулятор состоит из опорной платформы 102, жестко закрепленной на днище камеры 12 (нижний манипулятор 99) или крыше камеры инкубации 11 (верхний манипулятор 98). На опорной платформе 102 расположен поворотный стол 103, выполненный с возможностью вращения на угол до 400 градусов (по часовой стрелке и против часовой стрелки). Поворотный стол 103 приводится во вращение сервоприводом 104 с датчиком углового положения 121 и ременной передачей. На поворотном столе 103 размещена колонна вертикального перемещения 109 захвата манипулятора 105. На колонне 109 закреплен сервопривод вертикального перемещения 110 с шарико-винтовой передачей. Также на колонне закреплены датчики крайнего верхнего 122 и крайнего нижнего 123 положения захвата 105 и датчик «красной зоны» 125, формирующий сигнал о наличии захвата манипулятора 105 возле окна для загрузки и выгрузки контейнера 14 камеры инкубации и предотвращающий столкновение манипуляторов 98 и 99 в «красной зоне» 111. Захват 105 оснащен горизонтальным приводом перемещения 112 и ременной передачей для перемещения захвата к ячейке или от ячейки при установке или взятии контейнера с полки. Захват 105 имеет головку захвата 106, фигурные губки захвата 107 (зажимы) с накладками 108, повторяющими часть внешней поверхности контейнера, при этом головка захвата выполнена с возможностью поворота вокруг горизонтальной оси для обеспечения изменения положения контейнера при взятии с полки/установке на полку (переворота контейнера). Это позволяет фотографировать размещенные в контейнерах образцы в обычном положении, а хранить - крышкой вниз для минимизации попадания конденсата на образец.
Поскольку манипуляторы 98 и 99 механически имеют возможность переместиться в одну и ту же точку в пространстве (в рабочем объеме 27) камеры инкубации, в системе инкубации реализована совокупность программно-аппаратных мер по исключению их соударения в «красной зоне» 111. Для этой цели датчики 124 непрерывного контроля положения координат захвата каждого манипулятора, размещенные на вертикальной оси 114 сервопривода 115, выдают непрерывный сигнал, получаемый в управляющем программном обеспечении, после чего блоком управления рассчитываются и формируются координаты, в которые может перемещаться второй (другой) манипулятор, и передается соответствующий сигнал на первый манипулятор для выполнения им команды по его перемещению в допустимое (безопасное) место в рабочем объеме камеры или остановке во избежание столкновения. Так, например, в момент, когда один из манипуляторов находится в области окна загрузки контейнеров, для второго манипулятора формируется разрешающий сигнал на перемещение в область модуля формирования цифрового изображения, при этом запрещающий сигнал на перемещение в область окна загрузки. Кроме того, сервопривод 115 вертикальной оси 114 каждого манипулятора 98 и 99 имеет индуктивный датчик 125 наличия подвижной части в опасной зоне («красной зоне» 111). Сигнал указанных датчиков от каждого манипулятора 98 и 99 также передается в блок защиты блока управления 6, который формирует по срабатыванию этих датчиков сигнал на остановку сервопривода.
Блок управления системой 6 (фиг. 1, 25) представляет собой программно-аппаратный комплекс, включает локальное хранилище для программного обеспечения, необходимого для управления элементами системы, и независимое локальное хранилище для фотографий. Блок управления может содержать микропроцессор и комплект плат управления или микроконтроллеров, которые управляют функциями системы и обеспечивают работу по заданному алгоритму камеры инкубации, модуля загрузки и выгрузки контейнеров с образцами, модуля идентификации образца (сканеры), модулей формирования цифрового изображения (модулей фотографирования) образцов, манипуляторов модуля перемещения контейнеров в рабочем объеме камеры. Блок управления состоит из источников питания, преобразователей напряжения, защитных автоматов, плат управления шаговыми двигателями, плат управления двигателями постоянного тока, плат управления светильниками, нагревателями и прочим оборудованием камеры инкубации. Элементы блока управления системой размещены под лицевыми панелями камеры инкубации или блока загрузки/выгрузки. Компоновка элементов блока управления может осуществляться на специальных панелях (щитах) или DIN-рейках. От внутреннего объема камеры инкубации элементы блока управления изолированы стенками корпуса камеры инкубации, от внешних воздействий - лицевыми панелями.
Блок управления системой 6 содержит блок управления манипуляторами, который представляет собой два контроллера, подключенные к общей плате блокировки и защиты, которая формирует и передает сигнал на прекращение перемещения одного из манипуляторов (по вертикальной оси) при срабатывании датчика «красной зоны» у другого манипулятора. Контроллеры и плата блокировки и защиты могут быть размещены под передней стенкой камеры инкубации рядом с блоком формирования цифрового изображения.
За слаженную совместную работу электромеханических и электронных компонентов системы отвечает программный продукт, отвечающий также за временное хранение и передачу стороннему ПО (программному обеспечению) цифровых изображений колоний микроорганизмов для последующего анализа на удаленном АРМ. Минимальные путь движения контейнера с образцом и время его нахождения вне специально поддерживаемых микроклиматических условий (за пределами камеры инкубации) положительно влияют на качество и скорость получения результатов микробиологического исследования (более ранний рост колоний микроорганизмов). Получение цифровых изображений возможно на темном и светлом фонах.
Настоящее изобретение может подвергаться различным изменениям и модификациям, понятным специалисту на основе прочтения данного описания. Такие изменения не ограничивают объем притязаний.
Система для инкубации и формирования цифровых изображений биологических образцов работает следующим образом.
Из лотков загрузки 41 (как показано на фиг. 8, 9, 18, 19) контейнеры поочередно перемещаются на ленту транспортера 34. Контейнеры, подаваемые через лоток приоритетной загрузки, формируют сигнал на датчике наличия приоритетного контейнера 117, после чего программное обеспечение системы инкубации обеспечивает внеочередную транспортировку контейнера в камеру инкубации 1. Контейнер, покидая ленту транспортера 34, через шлюз 18 подается в камеру инкубации 1, где на приемном лифте 54 сканер штрих-кодов 58 считывает штрих-код для идентификации контейнера и сопоставляет его номер с программой инкубации в базе данных системы инкубации. После идентификации контейнера манипулятор 98 или 99 при помощи захвата 105 берет контейнер и перемещает его в ячейку 22 камеры инкубации, заданную управляющей программой. Перемещение осуществляется по трем координатам при помощи сервопривода вертикальной оси 115, поворотного стола 103 и привода горизонтальной оси 112. В ходе инкубации требуется периодически получать фотографии содержимого контейнера, для чего манипулятор 105 перемещает контейнер к модулю фотографирования 4, а именно к верхнему 61 или нижнему 62 модулю. В модуле фотографирования контейнер при помощи приемного лифта 54 опускается на уровень поворотного диска 68, диск поворачивается, перемещая контейнер к лифту транспортировочной корзины 81. Лифт корзины опускает контейнер в корзину, где происходит сканирование штрих-кода контейнера, и привод корзины 83 подает контейнер к объективу 96 фотокамеры 95. Привод 89 шторки 88 позволяет получать снимки контейнера на темном и светлом фоне, перемещая шторку 88 к контейнеру или от него. В то время, пока контейнер с образцом фотографируется, приемный лифт принимает следующий контейнер, после окончания цикла фотографирования для предыдущего контейнера поворотный диск 68 меняет контейнер местами, и новый контейнер перемещается в корзину 81, а контейнер, покинувший модуль фотографирования 4, манипулятором 105 транспортируется на свое место.
После завершения цикла инкубации контейнер манипулятором 105 транспортируется к лифту выгрузки 54, идентифицируется сканером штрих-кодов 58 и, пройдя через шлюз 18, покидает камеру инкубации 1, попадает на ленту транспортера 35 и подается в один из лотков выдачи (выгрузки) 42, после чего может быть утилизирован или отправлен на дополнительное исследование.
Пример конкретной реализации изобретения.
Изготовлен макет системы, в котором камера инкубации имела габариты, обеспечивающие вместимость до 720 чашек Петри. В камере зеркально установлены два трехкоординатных манипулятора, как показано на фиг. 4 - 9, один из которых был закреплен на крыше камеры, второй - на днище камеры. Каждый манипулятор оснащен захватом и 3-координатным приводом. В средней части передней стенки камеры выполнено окно загрузки и выгрузки контейнеров с лифтами, состоящими из шаговых электродвигателей и винтовых передач и сканерами штрих-кодов для идентификации контейнеров. В макете был установлен модуль фотографирования, выполненный аналогично модулю, представленному на фиг. 15 - 17, и оснащенному цифровой камерой Daheng Imaging с разрешением 25 Мп. Снаружи камеры инкубации был установлен внешний блок модуля загрузки и выгрузки контейнеров с образцами, выполненный как показано на фиг. 18 - 24, содержащий транспортер загрузки, транспортер выгрузки, два лотка загрузки и четыре лотка выгрузки контейнеров. Результаты проведенных испытаний камеры для инкубации и системы на ее основе продемонстрировали возможность получения до 360 фотографий образцов в час, в то время как автоматизированная система BD Kiestra ReadA (США) при сопоставимой вместимости камеры инкубации позволяет получить около 300 фотографий в час.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ИНКУБАЦИИ И ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811721C1 |
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| МОДУЛЬ ЗАГРУЗКИ И ВЫГРУЗКИ КОНТЕЙНЕРОВ ДЛЯ КАМЕРЫ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811536C1 |
| МОДУЛЬ И СИСТЕМА ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813210C1 |
| ЦИФРОВОЙ ОПТИЧЕСКИЙ БЛОК, УСТРОЙСТВО И СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825976C1 |
| СПЕКТРОСКОПИЧЕСКАЯ ГОЛОВКА ДЛЯ ЦИФРОВОГО ОПТИЧЕСКОГО БЛОКА УСТРОЙСТВА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825977C1 |
| АВТОНОМНАЯ СБОРОЧНАЯ МОДУЛЬНАЯ ЯЧЕЙКА | 2021 |
|
RU2755994C1 |
| СПОСОБ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ БАНКНОТ, И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ, БАНКНОТ | 2020 |
|
RU2737603C1 |
| Устройство системы потокового поэкземплярного контроля качества и сортировки единичных изделий в виде плоских многоугольников правильной формы | 2022 |
|
RU2784322C1 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |

Изобретение относится к медицинской технике, а именно к устройству для инкубации образцов в контейнерах, например в чашках Петри, и получения цифровых изображений результатов посева. Модуль перемещения контейнеров в камере для инкубации биологических образцов с окном для загрузки и выгрузки контейнеров содержит два 3-координатных манипулятора с захватом для контейнера, где каждый из манипуляторов содержит колонну вертикального перемещения захвата, горизонтальные направляющие и поворотный стол, снабженные приводами перемещения. При этом манипуляторы расположены один над другим с возможностью перекрытия рабочего хода друг друга с обеспечением доступа захвата каждого манипулятора к контейнеру, размещенному в рабочем объеме камеры инкубации у окна для загрузки и выгрузки контейнеров, и снабжены датчиками «красной зоны», выполненными с возможностью обнаружения присутствия захвата манипулятора в «красной зоне», расположенной вокруг окна для загрузки и выгрузки контейнеров, доступной для обслуживания верхним и нижним манипуляторами. Модуль перемещения контейнеров выполнен с возможностью прекращения перемещения одного манипулятора при срабатывании датчика «красной зоны» у другого манипулятора. Изобретение направлено на повышение производительности камеры для инкубации при исключении «столкновения» захватов двух манипуляторов в зоне окна для загрузки и выгрузки контейнеров. 9 з.п. ф-лы, 25 ил.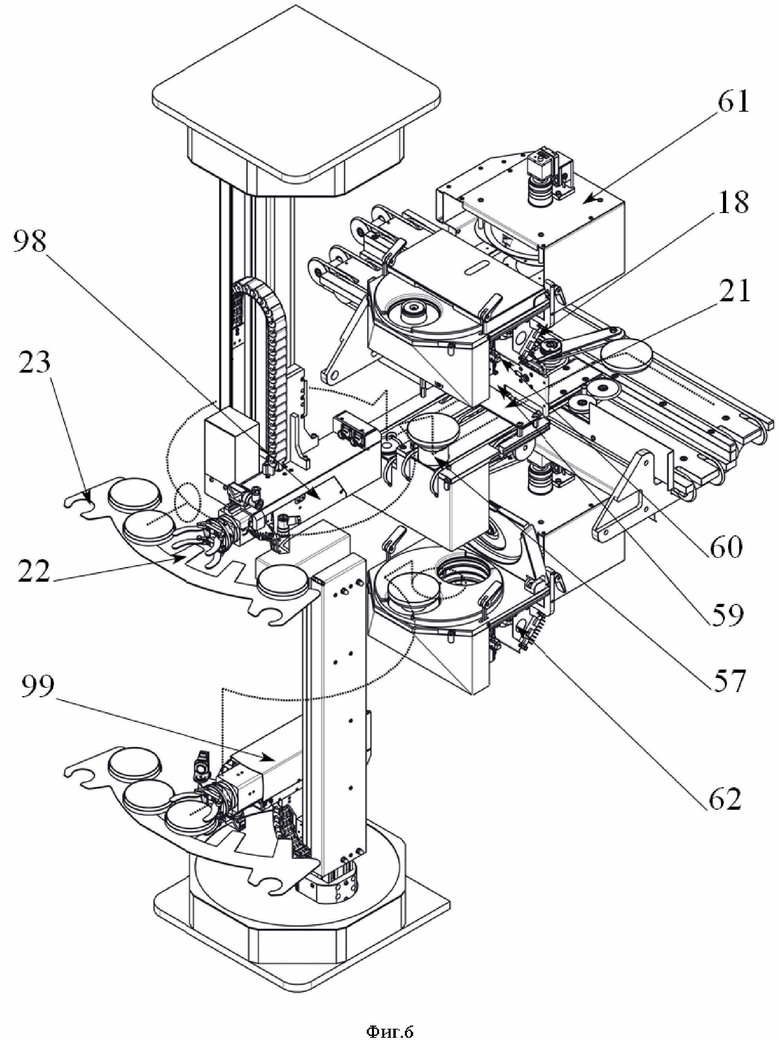
1. Модуль перемещения контейнеров в камере для инкубации биологических образцов, содержащей окно для загрузки и выгрузки контейнеров,
характеризующийся тем, что включает два 3-координатных манипулятора с захватом для контейнера, где каждый из манипуляторов содержит колонну вертикального перемещения захвата, горизонтальные направляющие и поворотный стол, снабженные приводами перемещения, при этом манипуляторы расположены один над другим с возможностью перекрытия рабочего хода друг друга с обеспечением доступа захвата каждого манипулятора к контейнеру, размещенному в рабочем объеме камеры инкубации у окна для загрузки и выгрузки контейнеров, и снабжены датчиками «красной зоны», выполненными с возможностью обнаружения присутствия захвата манипулятора в «красной зоне», расположенной вокруг окна для загрузки и выгрузки контейнеров, доступной для обслуживания верхним и нижним манипуляторами.
2. Модуль перемещения контейнеров по п.1, характеризующийся тем, что выполнен с возможностью прекращения перемещения одного манипулятора при срабатывании датчика «красной зоны» у другого манипулятора.
3. Модуль перемещения контейнеров по п.1, характеризующийся тем, что трехкоординатные манипуляторы в исходном положении до начала работы расположены зеркально симметрично относительно средней горизонтальной плоскости камеры, перпендикулярной плоскости окна для загрузки и выгрузки контейнеров.
4. Модуль перемещения контейнеров по п.1, характеризующийся тем, что поворотный стол трехкоординатного манипулятора выполнен с возможностью поворота до 400 градусов в противоположных направлениях.
5. Модуль перемещения контейнеров по п.1, характеризующийся тем, что 3-координатные манипуляторы снабжены датчиками крайнего нижнего и верхнего положения захвата манипулятора, датчиками непрерывного контроля положения координат захвата манипулятора.
6. Модуль перемещения контейнеров по п.5, характеризующийся тем, что датчики «красной зоны» расположены между датчиками крайнего верхнего и крайнего нижнего положения захватов манипуляторов с обеспечением возможности сигнализации при приближении механизмов перемещения контейнеров в камере инкубации друг к другу.
7. Модуль перемещения контейнеров по п.5, характеризующийся тем, что датчики крайнего нижнего и верхнего положения захвата манипулятора и датчик «красной зоны» закреплены на колонне вертикального перемещения захвата манипулятора.
8. Модуль перемещения контейнеров по п.1, характеризующийся тем, что датчики «красной зоны» представляют собой индуктивные датчики, при этом расстояние между датчиками, закрепленными на колоннах манипуляторов, составляет не менее высоты окна для загрузки и выгрузки контейнеров.
9. Модуль перемещения контейнеров по п.1, характеризующийся тем, что захват трехкоординатного манипулятора снабжен фигурными губками с накладками, выполненными с возможностью контроля усилия зажима контейнера.
10. Модуль перемещения контейнеров по п.1, характеризующийся тем, что приводы манипуляторов выполнены электромеханическими.
| WO 2022073847 A1, 14.04.2022 | |||
| US 6293750 B1, 25.09.2001 | |||
| US 20210270862 A1, 02.09.2021 | |||
| US 20100291669 A1, 18.11.2010. |

