Уровень техники
Изобретение в целом относится к автоматическому управлению элементами шасси транспортного средства. Более конкретно, изобретение относится к системе согласно ограничительной части независимого пункта 1 формулы изобретения и моторному транспортному средству согласно независимому пункту 8 формулы изобретения. Изобретение также относится к способу регулирования высоты элемента шасси моторного транспортного средства согласно ограничительной части независимого пункта 9 формулы изобретения.
На транспортных средствах большой грузоподъемности, таких как грузовики, автобусы и тягачи, имеющих системы пневматической подвески, обычно полезно обеспечивать регулирование уровня давления в системе подвески. А именно, тем самым, могут компенсироваться уровень нагрузки и распределения нагрузки. Естественно, наращивание давления воздуха связано с потреблением энергии, и для экономии топливных ресурсов транспортного средства является ключевым, чтобы компрессор использовался рационально.
В патенте Германии 103 60 231 описана подвеска с гидравлическим приводом, которая содержит винтовой насос с регулируемым подъемным кольцом. Здесь, винтовой насос может регулироваться для снижения избыточного давления, чтобы обеспечивать необходимый объем гидравлической жидкости. Однако, поскольку гидравлическая жидкость является, по существу, несжимаемой, трудно создавать резервный запас давления в связи с таким повышением давления выше уровня нормальной работы. Следовательно, насос должен приводиться в действие каждый раз, когда требуется высокое давление.
В патенте Германии 198 60 233 описана система подвески гидравлического и/или гидропневматического типа, при этом, гидравлический аккумулятор высокого давления присоединяется к напорной линии, если сигнал управления для объемного расхода насоса превышает пороговое значение. Одновременно, насос управляется на его максимальной производительности. Таким образом, потенциально, потребляется чрезмерная энергия.
В автомобильных пневматических системах, обычно определены два отдельных уровня давления, так называемый уровень включения, при котором компрессор начинает работать (то есть повышает давление в пневматической системе), и так называемый уровень отключения, при котором компрессор останавливается (то есть нисколько не повышает давление в пневматической системе сверх того). Общее направление развития сегодня состоит в том, что растущее количество функций транспортного средства требует сравнительно высокого давления воздуха. Чтобы гарантировать, что достаточное давление предусмотрено для этих применений, желательно повышать общее давление в системе. Несмотря на то что не является проблематичным поднимать уровень включения, более сложно и дорого поднимать уровень выключения. Проблема частично могла бы решаться подъемом только уровня включения. Однако эта стратегия имеет относительно небольшой размах давления между уровнями включения и отключения. В силу чего, также становится трудным выбирать случаи, в которых следует нагнетать резервный запас давления, который полезен относительно экономии топлива, например, при торможении двигателем. Небольшой размах обычно потребует, чтобы резервный запас давления нагнетался в зачастую неоптимальных случаях.
Сущность изобретения
Цель настоящего изобретения, поэтому, заключается в том, чтобы предложить решение, которое смягчает проблемы, приведенные выше, и, таким образом, предлагает энергоэкономичное управление регулируемым элементом шасси относительно, по меньшей мере, одной колесной пары транспортного средства, например, в связи с высотой шасси и/или переносом нагрузки между колесными осями, несущими шасси.
Согласно одному из аспектов изобретения, цель достигается описанной выше системой, при этом, система содержит датчик, выполненный с возможностью регистрации параметра, указывающего на измеренное значение, выражающее взаимное позиционное расположение между элементом шасси и, по меньшей мере, одной колесной парой. Датчик выполнен с возможностью передачи данных, представляющих измеренное значение, в блок управления. Этот блок, в свою очередь, дополнительно выполнен с возможностью сравнения измеренного значения с целевым значением и сравнения давления в системе с, по меньшей мере, одним пределом давления. По меньшей мере, один предел давления содержит первый верхний предел, задающий максимальный уровень интервала нормальной работы для системы источника давления воздуха. Более того, блок управления выполнен с возможностью определения, удовлетворен ли один из, по меньшей мере, двух критериев для принятия решения. Если, по меньшей мере, один такой критерий удовлетворен, блок управления выполнен с возможностью регулирования давления в системе до заданного уровня посредством второго сигнала управления. Заданный уровень здесь зависит от того, какой критерий для принятия решения удовлетворен. Блок управления дополнительно выполнен с возможностью регулирования давления в системе до первого верхнего предела, если найденное измеренное значение находится в пределах заданного диапазона около целевого значения до того, как давление в системе достигает первого верхнего предела.
Одно из важных преимуществ, достигаемое этой системой, заключается в том, что случаи, в которых приводятся в действие компрессоры, могут выбираться относительно свободно. Таким образом, посредством разумного выбора этих случаев, общий расход энергии пневматической системы регулирования может делаться сравнительно низким. Одновременно, может поддерживаться достаточный резервный запас давления. Более того, если целевое значение достижимо в пределах интервала нормальной работы, наращивается давление резервного запаса, представляющее разность между давлением выключения для интервала нормальной работы и уровнем давления, являющимся необходимым для достижения целевого значения.
Согласно одному из вариантов осуществления этого аспекта изобретения, по меньшей мере один предел давления содержит второй верхний предел, задающий максимально допустимое избыточное давление в системе источника давления воздуха. Более того, блок управления выполнен с возможностью регулирования давления в системе так, чтобы его текущий уровень поддерживался, если давление в системе достигает второго верхнего предела до того, как измеренное значение становится находящимся в пределах заданного диапазона около целевого значения. То есть, в ситуации, в которой невозможно создавать достаточно высокое давление в системе, обеспечивается наивысшее возможное давление. Предпочтительно, в таких ситуациях, блок управления также выполнен с возможностью формирования указания о недостижении целевого значения. Таким образом, пользователь может информироваться о том, что было невозможно удовлетворить требуемому целевому значению.
Согласно еще одному другому варианту осуществления этого аспекта изобретения, блок управления выполнен с возможностью регулирования давления в системе до результирующего уровня между первым верхним пределом и вторым верхним пределом, если найденное измеренное значение находится в пределах заданного диапазона около целевого значения после того, как давление в системе превысило первый верхний предел, однако, до того, как давление в системе достигло второго верхнего предела. Другими словами, давление в системе регулируется до значения в пределах интервала избыточного давления. Например, давление в системе может регулироваться до уровня, который требуется, чтобы удовлетворять целевому значению. Однако, согласно еще одному варианту осуществления этого аспекта изобретения, давление в системе регулируется до результирующего уровня, являющегося приблизительно равным второму верхнему пределу, так что давление резервного запаса наращивается над требуемым уровнем.
Согласно еще одному другому варианту осуществления аспекта настоящего изобретения, целевое значение представляет высоту элемента шасси над поверхностью, на которой расположено транспортное средство. Более того, датчик выполнен с возможностью регистрации параметра, указывающего на высоту элемента шасси над поверхностью. Следовательно, посредством задания целевой высоты, элемент шасси может автоматически регулироваться так, чтобы элемент шасси отделялся от земли на расстояние, равное этой высоте.
В качестве альтернативы, целевое значение может представлять давление на ось на колесной оси, к которой присоединена одна из указанной, по меньшей мере, одной колесной пары. Здесь, датчик выполнен с возможностью регистрации параметра, указывающего давление на ось. Тем самым, посредством задания целевого давления на ось для колесной оси, элемент шасси может автоматически регулироваться так, чтобы достигалось это давление на ось, например, в связи с распределением нагрузки.
Согласно еще одному аспекту изобретения, цель достигается моторным транспортным средством, которое содержит предложенную выше систему.
Согласно еще одному аспекту изобретения, цель достигается способом, описанным выше, при этом, способ включает регистрацию параметра, указывающего на измеренное значение, выражающее взаимное позиционное расположение между элементом шасси и, по меньшей мере, одной колесной парой. Способ дополнительно включает сравнение измеренного значения с целевым значением и сравнение давления в системе с, по меньшей мере, одним пределом давления. По меньшей мере, один предел давления содержит первый верхний предел, который задает максимальный уровень интервала нормальной работы для системы источника давления воздуха. Более того, способ включает определение, удовлетворен ли один из, по меньшей мере, двух критериев для принятия решения. Если один из указанных критериев удовлетворен, способ включает регулирование давления в системе до заданного уровня посредством второго сигнала управления. Заданный уровень здесь зависит от того, какой критерий для принятия решения удовлетворен. Если найденное измеренное значение находится в пределах заданного диапазона около целевого значения до того, как давление в системе достигает первого верхнего предела, способ, взамен, включает регулирование давления в системе до первого верхнего предела. Преимущества этого способа, а также его предпочтительных вариантов осуществления, очевидны из обсуждения, упомянутого выше со ссылкой на предложенную конструкцию транспортного средства.
Согласно дополнительному аспекту изобретения, цель достигается компьютерным программным продуктом, загружаемым непосредственно во внутреннюю память компьютера, содержащим программное обеспечение для управления предложенным выше способом, когда указанная программа запускается на компьютере.
Согласно еще одному аспекту изобретения, цель достигается машинно-читаемым носителем, содержащим программу, записанную на нем для управления предложенным выше способом посредством компьютера.
Дополнительные преимущества, полезные признаки и применения настоящего изобретения будут очевидны из последующего описания и прилагаемой формулы изобретения.
Краткое описание чертежей
Настоящее изобретение описано более подробно ниже посредством вариантов осуществления, которые раскрыты в качестве примеров, и со ссылкой на прилагаемые чертежи.
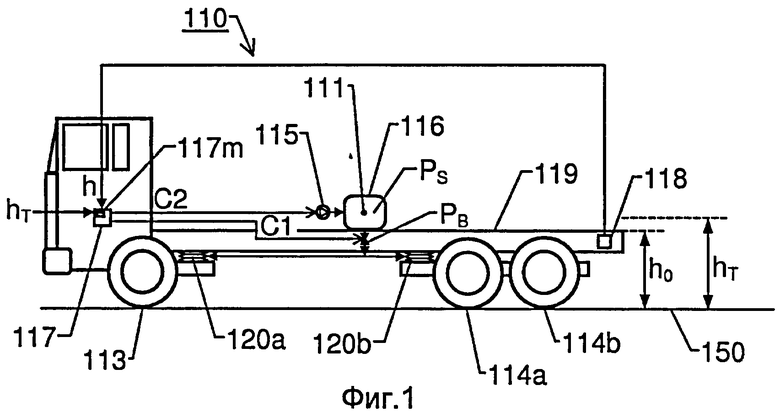
На Фиг.1 схематично показано моторное транспортное средство, содержащее систему согласно одному из вариантов осуществления изобретения.
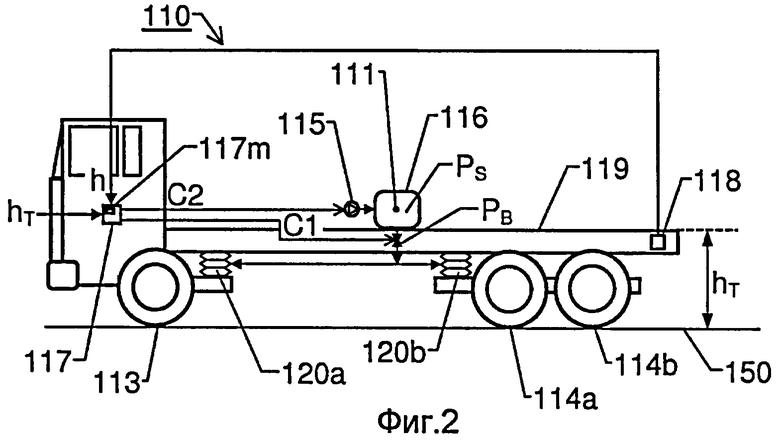
На Фиг.2 показано транспортное средство, показанное на фиг.1 во время этапа предложенного способа регулирования, следующим за этапом, показанным на фиг.1.
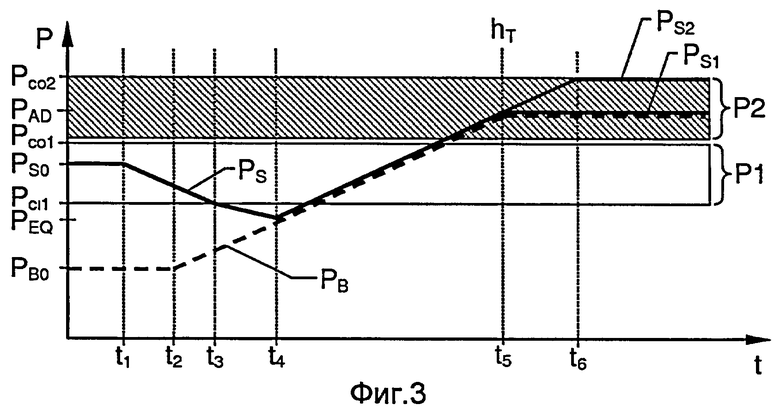
На Фиг.3 показана схема, иллюстрирующая, каким образом различные уровни давления воздуха могут изменяться согласно одному из вариантов осуществления изобретения.
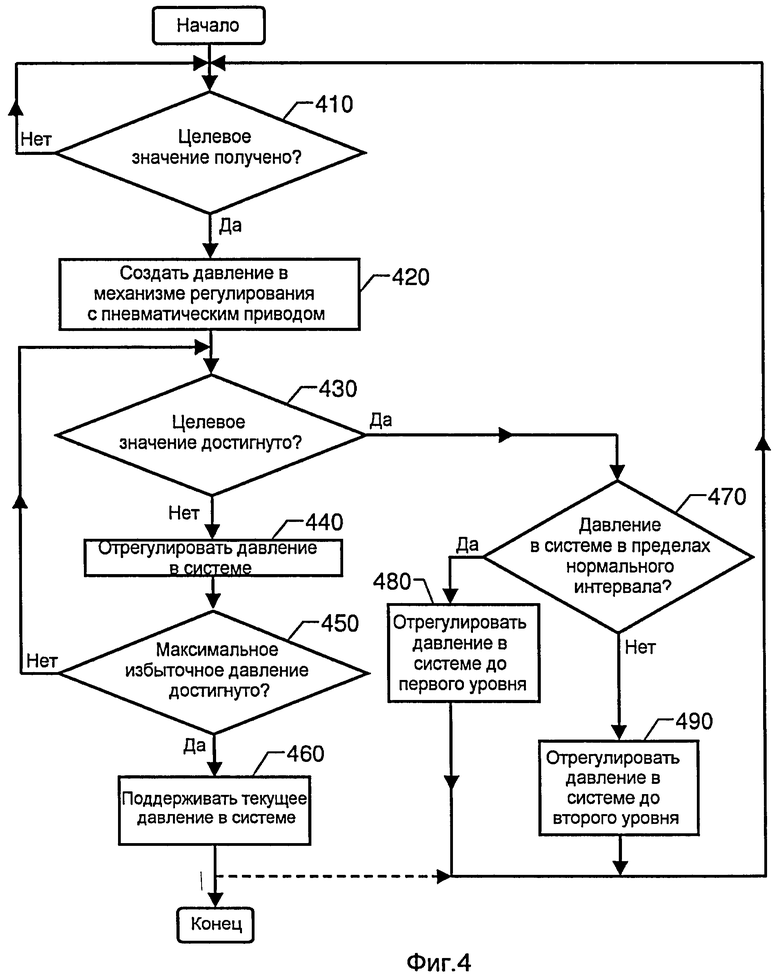
На фиг.4 показана блок-схема последовательности операций способа, иллюстрирующая общий способ согласно изобретению.
Описание вариантов осуществления изобретения
На фиг.1 показано моторное транспортное средство 110, например, грузовик, согласно одному из вариантов осуществления изобретения. Транспортное средство 110 имеет элемент 119 шасси, положение которого может изменяться относительно, по меньшей мере, одной колесной пары 113, 114a и/или 114b транспортного средства 110. Для этой цели, транспортное средство 110 содержит механизм регулирования с пневматическим приводом, который выполнен с возможностью приема входного воздушного потока и воздействия на взаимное позиционное расположение между элементом 119 шасси и, по меньшей мере, одной колесной парой 113, 114a и/или 114b посредством изменения входного воздушного потока в ответ на первый сигнал C1 управления. Например, механизм регулирования с пневматическим приводом может содержать множество сильфонов 120a и 120b, соответственно, или альтернативный тип газового резервуара, имеющего, по меньшей мере, одну эластичную стенку, выполненную с возможностью выдачи механической силы в ответ на количество входного воздуха.
Транспортное средство 110 также содержит систему источника давления воздуха, например, содержащую компрессор 115 и напорный бак 116, выполненные с возможностью создания давления PS в системе. Это давление PS, в свою очередь, выдает входной воздушный поток в механизм регулирования с пневматическим приводом. Блок 117 управления в транспортном средстве 110 выполнен с возможностью приема целевого значения hT и, на его основании, выработки первого сигнала C1 управления. Целевое значение hT может вводиться оператором (например, водителем) вручную, либо формироваться автоматически, например, другим блоком управления (например, так называемым ЭБУ - электронным блоком управления) в транспортном средстве 110. Датчик 111 давления, расположенный в системе источника воздушного давления, выполнен с возможностью регистрации параметра давления, указывающего на давление PS в системе, и передачи этого параметра в блок 117 управления.
Еще один датчик 118 выполнен с возможностью регистрации параметра, указывающего на измеренное значение h, выражающее относительное позиционное расположение между элементом 119 шасси и, по меньшей мере, одной колесной парой 113, 114a и/или 114b, и передачи данных, представляющих измеренное значение h, в блок 117 управления. Согласно еще одному другому варианту осуществления, целевое значение hT представляет высоту элемента 119 шасси над поверхностью 150, на которой расположено транспортное средство 110. В этом случае, датчик 118 выполнен с возможностью регистрации параметра h в виде высоты элемента 119 шасси над поверхностью 150. На фиг.1, предполагается, что транспортное средство 110 должно иметь начальную высоту h0, а целевое значение hT представляет до некоторой степени большую высоту над поверхностью 150. Датчик 118 может использовать любую известную технологию для определения высоты, такую как передача ультразвуковых волн, и/или различных разновидностей электромагнитных сигналов в тепловом, радиочастотном и/или световом диапазоне спектра. Для того чтобы оценить параметр h, датчик 118 и элемент 119 шасси должны иметь фиксированное и вполне определенное взаимное позиционное расположение. Однако точное местоположение средства 118 датчика является, по существу, неуместным. Конечно, предпочтительно, если датчик 118 расположен там, где он относительно защищен от физических повреждений и загрязнения.
Согласно еще одному варианту осуществления изобретения (не показан), целевое значение представляет давление на ось на колесной оси, к которой присоединена одна из указанной, по меньшей мере, одной колесной пары 113, 114a и/или 114b. В этом случае, датчик 118, взамен, выполнен с возможностью регистрации параметра, указывающего это давление на ось.
В любом случае, блок 117 управления выполнен с возможностью сравнения измеренного значения h с целевым значением hT и сравнения давления PS в системе с, по меньшей мере, одним пределом давления. На основании этих сравнений, блок 117 управления выполнен с возможностью определения, удовлетворен ли один из, по меньшей мере, двух критериев для принятия решения. Если такой критерий не удовлетворен, блок 117 управления дополнительно выполнен с возможностью регулирования давления PS в системе до заданного уровня посредством второго сигнала C2 управления. Заданный уровень, в свою очередь, зависит от того, какой критерий для принятия решения удовлетворен. Критерии для принятия решения и заданные уровни будут подробно описаны ниже со ссылкой на фиг.3.
На фиг.2 показано транспортное средство, показанное на фиг.1, когда элемент 119 шасси был поднят, из условия, чтобы измеренное значение h равнялось целевому значению hT, или из условия, чтобы измеренное значение h было, по меньшей мере, по существу, близким к целевому значению hT, или, более конкретно, в пределах заданного диапазона около целевого значения hT (то есть, h=hT+hΔ, где hΔ представляет приемлемое допустимое отклонение). Как может быть видно на фиг.2, сильфоны 120a и 120b растягиваются до относительно большой степени по сравнению с ситуацией, показанной на фиг.1. В зависимости от различных нелинейностей в отношении давления к растяжению, описывающем движение сильфонов 120a и 120b, и величины нагрузки, несомой элементом 119 шасси, целевая высота hT может быть достигнута или не достигнута в пределах интервала нормальной работы для давления PS в системе.
Далее, со ссылкой на фиг.3, видим схему, иллюстрирующую пример того, каким образом давление P воздуха, в системе источника давления воздуха, PS (сплошная линия), и механизме регулирования с пневматическим приводом, PB (пунктирная линия), могут изменяться со временем t согласно одному из вариантов осуществления изобретения.
Определен набор заданных уровней давления, например, задающих интервал P1 нормального давления от P=Pci1 до P=Pco1, и интервал P2 избыточного давления от P=Pco1 до P=Pco2, соответственно. Первый верхний предел Pco1 (P1 выключения) устанавливает максимальный уровень для интервала P1 нормальной работы, а второй верхний предел Pco2 (P2 выключения) устанавливает максимальный уровень для интервала P2 избыточного давления системы 115 и 116 источника давления воздуха на фиг.1 и 2. Предпочтительно, первый верхний предел Pco1 также равен нижнему пределу (P2 включения) для интервала P2 избыточного давления, таким образом, избегая неопределенного диапазона давления между интервалами P1 и P2 давления, соответственно.
В проиллюстрированном примере, допустим, что система PS источника давления воздуха изначально имеет уровень PS0 давления в интервале P1 нормального давления (то есть между первым нижним пределом Pci1 (P1 включения) и первым верхним пределом Pco1). Механизм регулирования с пневматическим приводом, однако, имеет уровень PB давления ниже Pci1. В первый момент времени t1, после этого, блок 117 управления принимает целевое значение hT, определяющее требуемую высоту элемента 119 шасси. Поэтому, блок 117 управления формирует первый сигнал C1 управления, который обеспечивает подачу сжатого воздуха из системы источника давления воздуха в сильфоны 120a и 120b механизма регулирования с пневматическим приводом. В результате, элемент 119 шасси начинает подниматься от свой текущей высоты над поверхностью 150.
Затем, во второй момент времени t2, по меньшей мере, один из сильфонов 120a и 120b достигает точки, где его обусловленное отношением давления к удлинению перемещение является нелинейным и/или возрастает вес, несомый элементом 119 шасси (например, вследствие того, что заносится элемент груза). Поэтому, к тому же, уровень PB давления в механизме регулирования с пневматическим приводом начинает возрастать, и как дальнейшее следствие, начинает снижаться уровень PS давления воздуха в системе источника. В третий, и еще более поздний момент t3, давление PS в системе упало вплоть до первого нижнего предела Pci1 (P1 включения). Вследствие этого блок 117 управления формирует второй сигнал C2 управления, приводящий в действие компрессор 115. Поскольку в t3 по-прежнему уровень PB давления в механизме регулирования с пневматическим приводом является меньшим, чем давление PS в системе, это давление продолжает повышаться. Тем не менее, в еще более поздний момент t4, воздух, хранящийся в напорном баке 116, был потреблен, а уровни PB и PS давления выравниваются на результирующем уровне PEQ.
Здесь, результирующий уровень PEQ находится ниже первого нижнего предела Pci1 интервала P1 нормального давления. Следовательно, при описанном выше сравнении, производимом блоком 117 управления, определяется, что PEQ=PS<Pci1. Это побуждает блок 117 управления формировать такой второй сигнал C2 управления в компрессор 115, что давление PS в системе продолжает увеличиваться. Поскольку уровни PS и PB давления в системе источника давления воздуха и механизме регулирования с пневматическим приводом теперь выровнены, уровень PB давления следует за уровнем PS давления в системе во время этого повышения.
Согласно изобретению, увеличение давления PS в системе продолжается до тех пор, пока не удовлетворен критерий для принятия решения по измеренному значению h и целевому значению hT. Более конкретно, данный критерий рассматривается в качестве удовлетворенного, если измеренное значение h становится находящимся в пределах заданного диапазона около целевого значения hT. Теоретически, критерий становится удовлетворенным до того, как давление PS в системе достигает первого верхнего предела Pco1 (P1 выключения). В этом примере, однако, измеренное значение h не становится находящимся в пределах заданного диапазона около целевого значения hT до того, как давление PS в системе (и давление PB в механизме регулирования с пневматическим приводом) достигло этого предела Pco1. Взамен, в пятый момент времени t5, достигается достаточный уровень PAD давления, где Pco1<PAD<Pco2.
Тем не менее, если найденное измеренное значение h находится в пределах заданного диапазона около целевого значения hT уже до того, как давление PS в системе достигало первого верхнего предела Pco1, согласно одному из вариантов осуществления изобретения, блок 117 управления выполнен с возможностью регулирования давления PS в системе до первого верхнего предела Pco1. А именно, тем самым, давление полезного резервного запаса наращивается в системе источника давления воздуха.
Согласно еще одному варианту осуществления изобретения, блок 117 управления выполнен с возможностью регулирования давления PS в системе так, чтобы его текущий уровень поддерживался, если давление PS в системе достигает второго верхнего предела Pco2 до того, как измеренное значение h становится находящимся в пределах заданного диапазона около целевого значения hT. Это означает, что целевое значение hT не может быть удовлетворено. Однако, посредством поддержания давления в системе на уровне Pco2 достигается ближайшее возможное регулирование элемента 119 шасси. Предпочтительно, в связи с такой ситуацией, блок 117 управления выполнен с возможностью формирования указания того, что целевое значение hT не могло бы быть достигнуто. Таким образом, оператор транспортного средства 110 может принимать надлежащие меры.
Согласно одному из вариантов осуществления изобретения, блок 117 управления выполнен с возможностью регулирования давления PS в системе до результирующего уровня выше первого верхнего предела Pco1, однако, ниже второго верхнего предела Pco2, если найденное измеренное значение h находится в пределах заданного диапазона около целевого значения hT после того, как давление PS в системе превысило первый верхний предел Pco1, однако, до того, как давление PS в системе достигло второго верхнего предела Pco2. Результирующий уровень PS1 может быть по существу равным уровню PAD, являющемуся достаточным для достижения целевого значения hT. Таким образом, не создается никакого избыточного давления.
Согласно еще одному варианту осуществления изобретения, блок 117 управления выполнен с возможностью регулирования давления PS в системе до результирующего уровня PS2, являющегося приблизительно равным второму верхнему пределу Pco2, если найденное измеренное значение h находится в пределах заданного диапазона около целевого значения hT после того, как давление PS в системе превысило первый верхний предел Pco1, однако, до того, как давление PS в системе достигло второго верхнего предела Pco2. Таким образом, создается давление резервного запаса выше достаточного уровня PAD, который может использоваться для манипулирования будущими целевыми значениями hT, требующими высоких уровней давления. В примере, проиллюстрированном на фиг.3, давление PS в системе достигает результирующего уровня PS2 в еще более поздний момент времени t6.
Для того чтобы подвести итог, общий способ согласно изобретению для регулирования элемента шасси моторного транспортного средства будет описан ниже со ссылкой на блок-схему последовательности операций способа, показанную на фиг.4.
Первый этап 410 проверяет, было или принято целевое значение в блоке 117 управления или нет. Если никакое такое значение не было принято, способ возвращается к началу цикла и остается на этапе 410. Иначе, следует этап 420, который создает давление в механизме регулирования с пневматическим приводом для регулирования элемента шасси относительно, по меньшей мере, одной колесной пары. Затем, этап 430 проверяет, было достигнуто целевое значение или нет, и, если так, следует этап 470. Иначе, способ продолжается этапом 440, на котором регулируется давление в системе. (Единственный случай, являющийся интересным относительно изобретения, относится к увеличению давления в системе. Однако уменьшение этого давления не исключается в регулировании, выполняемом на этапе 440). После этапа 440, этап 450 проверяет, было достигнуто максимальное избыточное давление или нет, и, если так, следует этап 460. Иначе, способ вновь возвращается к началу цикла на этап 430.
Вход на этап 460, упомянутый выше, эквивалентен случаю, в котором давление в системе достигает второго верхнего предела Pco2 до того, как измеренное значение h становится находящимся в пределах заданного диапазона около целевого значения hT, а потому, целевое значение hT не может быть удовлетворено. Этап 460 поддерживает текущий уровень давления в системе. Следовательно, достигается наиближайшее возможное регулирование элемента 119 шасси. Как уже упомянуто, предпочтительно, чтобы, к тому же, формировалось указание, которое отражает тот факт, что целевое значение hT не могло бы быть достигнуто. После этапа 460, способ может заканчиваться, либо возвращаться к началу цикла на этап 410 (как обозначено пунктирной стрелкой).
Этап 470 проверяет, находится давление в системе в пределах нормального интервала (то есть, Pcio1<PS<Pco1 на фиг. 3) или нет. Если найденное давление в системе находится в пределах нормального интервала, следует этап 480, который регулирует давление в системе до первого заданного уровня, например, первый верхний предел Pco1, который задает верхний уровень нормального интервала. Впоследствии, способ возвращается к началу цикла на этап 410. Если, однако, на этапе 470 найденное давление в системе находится вне нормального интервала, следует этап 490, который регулирует давление в системе до второго заданного уровня, например, уровня PAD, являющегося достаточным для достижения целевого значения hT. Затем, способ возвращается к началу цикла на этап 410.
Все из этапов последовательности операций, а также любой подпоследовательности этапов, описанных выше, со ссылкой на фиг.4, могут управляться посредством запрограммированного компьютерного устройства. Более того, хотя варианты осуществления изобретения, описанные выше со ссылкой на чертежи, содержат компьютерное устройство и последовательности операций, выполняемые в компьютерном устройстве, изобретение, соответственно, распространяется на компьютерные программы, более конкретно, компьютерные программы на носителе или в нем для осуществления изобретения. Программа может быть в виде исходного текста программы; объектного кода, промежуточного источника кода и объектного кода, такого как частично скомпилированная форма, или в любом другом виде, подходящем для использования при реализации последовательности операций согласно изобретению. Носитель может быть любым объектом или устройством, допускающими перенос программы. Например, носитель может содержать запоминающий носитель, такой как флэш-память, ПЗУ (постоянное запоминающее устройство, ROM), например, CD (компакт-диск) или полупроводниковое ПЗУ, ППЗУ (стираемое программируемое постоянное запоминающее устройство, EPROM), ЭСППЗУ (электрически стираемое программируемое постоянное запоминающее устройство, EEPROM) или магнитный запоминающий носитель, например, гибкий диск или жесткий диск. Кроме того, носитель может быть передаваемым, таким как электрический или оптический сигнал, который может передаваться через электрический или оптический кабель или по радио или другим средством. Когда программа воплощена в сигнале, который может непосредственно передаваться кабелем или другим устройством либо средством, носитель может быть составлен таким кабелем или устройством, либо средством. В качестве альтернативы, носитель может быть интегральной схемой, в которой воплощена программа, интегральная схема является приспособленной для выполнения, или для использования при выполнении, соответствующих последовательностей операций.
Изобретение не ограничено описанными вариантами осуществления на чертежах, но может свободно изменяться в пределах объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРОВАНИЕ ПОДЪЕМА ЭЛЕМЕНТОВ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2475372C2 |
| ЭЛЕКТРОХИМИЧЕСКИЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЙ IN VIVO ИЛИ EX VIVO ПАРЦИАЛЬНОГО ДАВЛЕНИЯ ДИОКСИДА УГЛЕРОДА В ЖИВЫХ ТКАНЯХ | 2005 |
|
RU2380029C2 |
| КОЛЕСНЫЙ УЗЕЛ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, НАПРАВЛЯЕМОГО ПО ЖЕЛЕЗНОДОРОЖНОМУ ПУТИ | 2017 |
|
RU2710467C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ СИНТЕЗА ПЕНТАКАРБОНИЛА ЖЕЛЕЗА | 1989 |
|
RU2090592C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПЕРЕМЕННОЙ КОЛЕЕЙ | 2011 |
|
RU2570184C2 |
| АДАПТИВНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ВО ВРЕМЯ БУКСИРОВКИ | 2015 |
|
RU2696891C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ ДЛЯ АВТОНОМНОГО ЗАМЕДЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ХРАНЕНИЯ ДАННЫХ | 2017 |
|
RU2688403C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2485372C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ПРОСКАЛЬЗЫВАНИЯ КОЛЕСНЫХ ПАР ПРИ ТОРМОЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2021 |
|
RU2770941C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
Группа изобретений относится к автоматическому управлению элементами шасси транспортного средства. Система содержит механизм регулирования с пневматическим приводом, систему источника давления воздуха, блок управления, датчик давления, датчик регистрации значения взаимного расположения между элементом шасси и колесной парой. Блок управления выполнен с возможностью сравнения измеренного значения с целевым значением, сравнения давления в системе с пределом давления, определения, удовлетворен ли один из двух критериев для принятия решения, регулирования давления в системе до заданного уровня и регулирования давления в системе до первого верхнего предела. Способ включает этапы, на которых воздействуют на взаимное позиционное расположение между элементом шасси и колесной парой, вырабатывают сигнал управления на основании целевого значения, подают воздушный поток в механизм регулирования, регистрируют параметр давления в системе, регистрируют параметр значения взаимного расположения между элементом шасси и колесной парой, сравнивают измеренное значение с целевым значением, сравнивают давление в системе с пределом давления. Определяют удовлетворение одного из двух критериев. Если один из критериев удовлетворен, регулируют давление в системе до заданного уровня. Регулируют давление в системе до первого верхнего предела, если измеренное значение находится в пределах заданного диапазона около целевого значения до того, как давление в системе достигает первого верхнего предела. Моторное транспортное средство содержит указанную систему. Технический результат заключается в обеспечении энергоэкономичного управления элементом шасси транспортного средства. 3 н. и 12 з.п. ф-лы, 4 ил.
1. Система управления для регулирования элемента (119) шасси моторного транспортного средства (110), содержащая механизм регулирования с пневматическим приводом, выполненный с возможностью приема входного воздушного потока, и воздействия на взаимное позиционное расположение между элементом (119) шасси и, по меньшей мере, одной колесной парой (113; 114а, 114b) транспортного средства (110) посредством изменения входного воздушного потока в ответ на первый сигнал (С1) управления, систему (115; 116) источника давления воздуха, выполненную с возможностью создания давления (PS) в системе и подачи входного воздушного потока в механизм регулирования с пневматическим приводом, блок (117) управления, выполненный с возможностью приема целевого значения (hT) и, на его основании, выработки первого сигнала (С1) управления, и датчик (111) давления, выполненный с возможностью регистрации параметра давления, указывающего на давление (PS) в системе, отличающаяся тем, что она содержит датчик (118), выполненный с возможностью регистрации параметра, указывающего на измеренное значение (h), выражающее взаимное позиционное расположение между элементом (119) шасси и, по меньшей мере, одной колесной парой (113; 114а, 114b), и передачи данных, представляющих измеренное значение (h), в блок (117) управления, при этом блок (117) управления выполнен с возможностью сравнения измеренного значения (h) с целевым значением (hT), сравнения давления (PS) в системе с, по меньшей мере, одним пределом (Pco1; Рсо2) давления, причем, по меньшей мере, один предел давления содержит первый верхний предел (Pco1), задающий максимальный уровень интервала нормальной работы для системы (115; 116) источника давления воздуха, определения, удовлетворен ли один из, по меньшей мере, двух критериев для принятия решения, и если один из указанных критериев удовлетворен, регулирования давления (PS) в системе до заданного уровня (Pco1, Рсо2, PS1 PS2) посредством второго сигнала (С2) управления, причем заданный уровень зависит от того, какой критерий для принятия решения удовлетворен, и регулирования давления (PS) в системе до первого верхнего предела (Pco1), если найденное измеренное значение (h) находится в пределах заданного диапазона около целевого значения (hT) до того, как давление (PS) в системе достигает первого верхнего предела (Pco1).
2. Система по п.1, отличающаяся тем, что, по меньшей мере, один предел давления содержит второй верхний предел (Рсо2), задающий максимально допустимое избыточное давление в системе (115; 116) источника давления воздуха, при этом блок (117) управления выполнен с возможностью регулирования давления (PS) в системе так, чтобы его текущий уровень поддерживался, если давление (PS) в системе достигает второго верхнего предела (Рсо2) до того, как измеренное значение (h) становится находящимся в пределах заданного диапазона около целевого значения (hT).
3. Система по п.2, отличающаяся тем, что блок (117) управления выполнен с возможностью формирования указания о недостижении целевого значения (hT), если давление (PS) в системе достигает второго верхнего предела (Рco2) до того, как измеренное значение (h) становится находящимся в пределах заданного диапазона около целевого значения (hT).
4. Система по п.2 или 3, отличающаяся тем, что блок (117) управления выполнен с возможностью регулирования давления (PS) в системе до результирующего уровня (PS1; PS2) выше первого предела (Pco1) однако ниже второго верхнего предела (Рсо2), если найденное измеренное значение (h) находится в пределах заданного диапазона около целевого значения (hT) после того, как давление (PS) в системе превысило первый верхний предел (Pco1), однако до того, как давление (PS) в системе достигло второго верхнего предела (Рсо2).
5. Система по п.4, отличающаяся тем, что результирующий уровень (PS2) приблизительно равен второму верхнему пределу (Рсо2).
6. Система по п.1, отличающаяся тем, что целевое значение (hT) представляет высоту элемента (119) шасси над поверхностью (150), на которой расположено транспортное средство (110), при этом датчик (118) выполнен с возможностью регистрации параметра (h), указывающего высоту элемента (119) шасси над поверхностью (150).
7. Система по п.1, отличающаяся тем, что целевое значение представляет давление на ось на колесной оси, к которой присоединена одна из указанной, по меньшей мере, одной колесной пары (113; 114а, 114b), при этом датчик (118) выполнен с возможностью регистрации параметра, указывающего давление на ось.
8. Моторное транспортное средство (110), содержащее систему управление по любому из пп.1-7.
9. Способ регулирования элемента (119) шасси моторного транспортного средства (110), включающий этапы, на которых воздействуют на взаимное позиционное расположение между элементом (119) шасси и, по меньшей мере, одной колесной парой (113; 114а, 114b) транспортного средства (110) на основании регулирования входного воздушного потока в ответ на первый сигнал (С1) управления, вырабатывают сигнал (С1) управления на основании целевого значения (hT), подают входной воздушный поток в механизм регулирования с пневматическим приводом из системы (115; 116) источника давления воздуха, которая создает давление (PS) в системе, и регистрируют параметр давления, указывающий на давление (PS) в системе, отличающийся тем, что регистрируют параметр, указывающий на измеренное значение (h), выражающее взаимное позиционное расположение между элементом (119) шасси и, по меньшей мере, одной колесной парой (113; 114а, 114b), сравнивают измеренное значение (h) с целевым значением (hT), сравнивают давление (PS) в системе с, по меньшей мере, одним пределом (Рсо1, Рсо2) давления, при этом, по меньшей мере, один предел давления содержит первый верхний предел (Pco1), задающий максимальный уровень интервала нормальной работы для системы (115; 116) источника давления воздуха, определяют, удовлетворен ли один из, по меньшей мере, двух критериев для принятия решения, и если один из указанных критериев удовлетворен, регулируют давление (PS) в системе до заданного уровня (Рсо1, Рсо2, PS1, PS2) посредством второго сигнала (С2) управления, причем заданный уровень зависит от того, какой критерий для принятия решения удовлетворен, и регулируют давление (PS) в системе до первого верхнего предела (Pco1), если найденное измеренное значение (h) находится в пределах заданного диапазона около целевого значения (hT) до того, как давление (PS) в системе достигает первого верхнего предела (Pco1).
10. Способ по п.9, отличающийся тем, что, по меньшей мере, один предел давления содержит второй верхний предел (Рcо2), задающий максимально допустимое избыточное давление в системе (115; 116) источника давления воздуха, при этом способ включает регулирование давления (PS) в системе так, чтобы его текущий уровень поддерживался, если давление (PS) в системе достигает второго верхнего предела (Рсо2) до того, как измеренное значение (h) становится находящимся в пределах заданного диапазона около целевого значения (hT).
11. Способ по п.10, отличающийся тем, что формируют указание о недостижении целевого значения (hT), если давление (PS) в системе достигает второго верхнего предела (Рсо2) до того, как измеренное значение (h) становится находящимся в пределах заданного диапазона около целевого значения (hT).
12. Способ по п.10 или 11, отличающийся тем, что регулируют давление (PS) в системе до результирующего уровня (PS1; PS2) выше первого верхнего предела (Pco1), однако ниже второго верхнего предела (Рсо2), если найденное измеренное значение (h) находится в пределах заданного диапазона около целевого значения (hT) после того, как давление (PS) в системе превысило первый верхний предел (Pco1), однако до того, как давление (PS) в системе достигло второго верхнего предела (Рсо2).
13. Способ по п.12, отличающийся тем, что результирующий уровень (PS2) является приблизительно равным второму верхнему пределу (Рсо2).
14. Способ по п.9, отличающийся тем, что целевое значение (hT) представляет высоту элемента (119) шасси над поверхностью (150), на которой расположено транспортное средство (110), при этом способ включает регистрацию параметра (h), указывающего высоту элемента (119) шасси над поверхностью (150).
15. Способ по п.9, отличающийся тем, что целевое значение представляет давление на ось на колесной оси, к которой присоединена одна из указанной, по меньшей мере, одной колесной пары (113; 114а, 114b), при этом способ включает регистрацию параметра, указывающего давление на ось, чтобы представлять измеренное затем значение.
| Ручная косилка | 1990 |
|
SU1695847A1 |
| JP 6219128 A, 09.08.1994 | |||
| US 2005236781 А1, 27.10.2005 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПОДЪЕМА КОНТЕЙНЕРА ИЛИ АНАЛОГИЧНОГО ГРУЗА НА ПОГРУЗОЧНУЮ ПЛАТФОРМУ И СНЯТИЯ ИХ С НЕЕ | 1994 |
|
RU2131363C1 |

