Область техники, к которой относится изобретение
[0001] Данное изобретение относится к области транспортных средств.
[0002] Более конкретно, данное изобретение относится к регулированию максимальной скорости работы тормозного насоса на основе целевого и измеренного замедлений.
Уровень техники
[0003] Типично, транспортное средство включает в себя тормозную систему для того, чтобы сбавлять скорость или замедлять транспортное средство. Некоторые тормозные системы включают в себя педаль тормоза, тормозной цилиндр, тормозные магистрали и колесные тормоза. В таких примерах, тормозной цилиндр формирует гидравлическое давление, когда водитель нажимает педаль тормоза. Гидравлическое давление подается в колесные тормоза через тормозные магистрали. Колесные тормоза затем зацепляют колеса транспортного средства для того, чтобы ограничивать и/или сдерживать вращение колес и за счет этого останавливать и/или иным образом замедлять транспортное средство.
Раскрытие изобретения
[0004] Прилагаемая формула изобретения задает эту заявку. Настоящее раскрытие сущности обобщает аспекты вариантов осуществления и не должно использоваться для того, чтобы ограничивать формулу изобретения. Другие реализации предположены в соответствии с технологиями, описанными в данном документе, как должно быть очевидным для специалистов в данной области техники после изучения нижеприведенных чертежей и подробного описания, и эти реализации должны быть в пределах объема этой заявки.
[0005] Показаны примерные варианты осуществления для регулирования максимальной скорости работы тормозного насоса на основе целевого и измеренного замедлений. Примерное раскрытое транспортное средство включает в себя тормозной насос, имеющий максимальную скорость работы насоса. Примерное раскрытое транспортное средство также включает в себя деселератор транспортного средства для того, чтобы определять целевое замедление для автономного замедления и отправлять сигнал в тормозной насос для того, чтобы замедлять транспортное средство при целевом замедлении. Примерное раскрытое транспортное средство также включает в себя первый датчик для того, чтобы определять измеренное замедление, и регулятор максимальной скорости для того, чтобы регулировать максимальную скорость работы насоса на основе разности между целевым замедлением и измеренным замедлением.
[0006] Примерный раскрытый способ для автономного замедления транспортного средства включает в себя определение, через процессор, целевого замедления для транспортного средства и отправку сигнала в тормозной насос для того, чтобы замедлять транспортное средство при целевом замедлении. Тормозной насос имеет максимальную скорость работы насоса. Примерный раскрытый способ также включает в себя определение измеренного замедления через первый датчик и регулирование максимальной скорости работы насоса на основе разности между целевым замедлением и измеренным замедлением.
[0007] Примерный раскрытый материальный машиночитаемый носитель хранения данных включает в себя инструкции, которые при выполнении инструктируют транспортному средству определять, через процессор, целевое замедление транспортного средства и отправлять сигнал в тормозной насос для того, чтобы замедлять транспортное средство при целевом замедлении, тормозной насос имеет максимальную скорость работы насоса. Инструкции, которые при выполнении также инструктируют транспортному средству определять измеренное замедление через первый датчик и регулировать максимальную скорость работы насоса на основе разности между целевым замедлением и измеренным замедлением.
Краткое описание чертежей
[0008] Для лучшего понимания изобретения, следует обратиться к вариантам осуществления, показанным на нижеприведенных чертежах. Компоненты на чертежах не обязательно нарисованы в масштабе, и соответствующие элементы могут опускаться, либо в некоторых случаях пропорции могут быть чрезмерно увеличены, с тем чтобы подчеркивать и ясно иллюстрировать новые признаки, описанные в данном документе. Помимо этого, системные компоненты могут компоноваться различными способами, как известно в данной области техники. Дополнительно, на чертежах, аналогичные ссылки с номерами обозначают соответствующие части на нескольких видах.
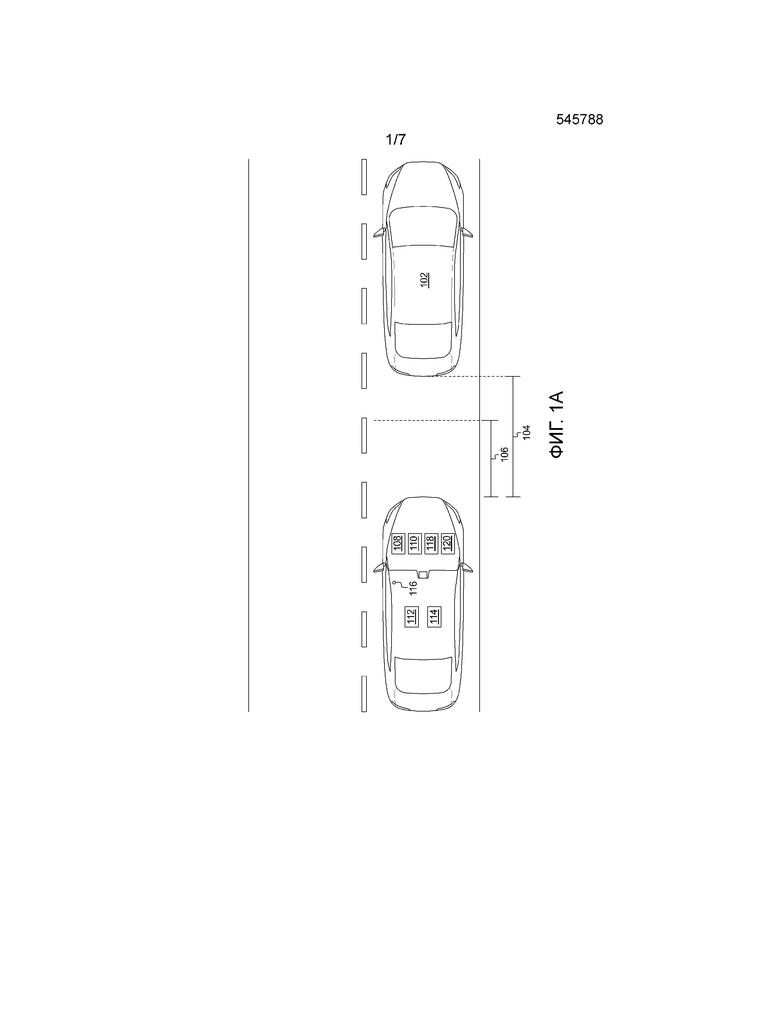
[0009] Фиг. 1A иллюстрирует примерное транспортное средство в соответствии с идеями в данном документе, отдаленное от объекта на первое расстояние.
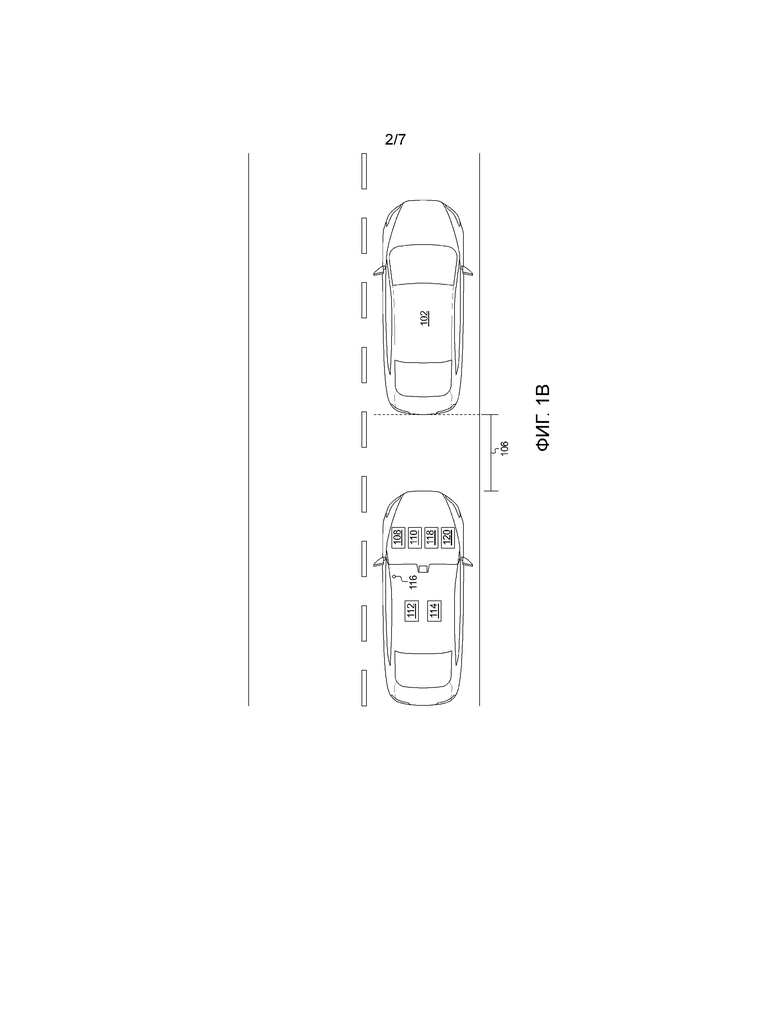
[0010] Фиг. 1B иллюстрирует транспортное средство по фиг. 1A, отдаленное от объекта на второе расстояние.
[0011] Фиг. 2 является блок-схемой контроллера автономного движения в режиме регулирования скорости и тормозной системой транспортного средства фиг. 1A-1B.
[0012] Фиг. 3 является блок-схемой электронных компонентов транспортного средства по фиг. 1A-1B.
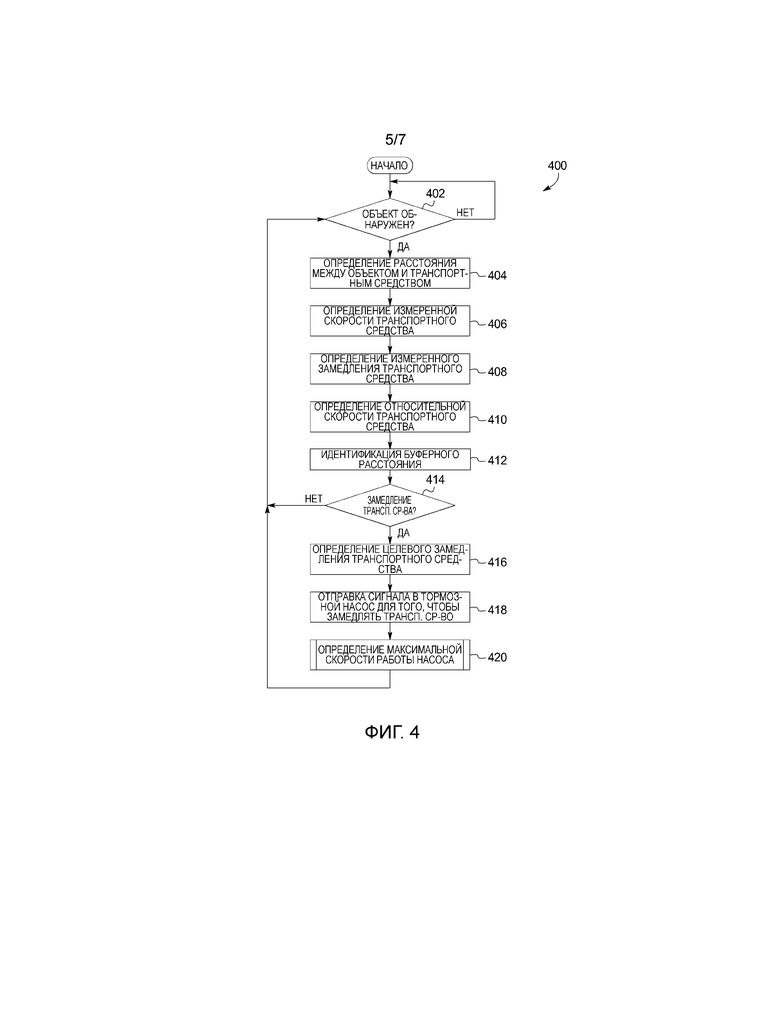
[0013] Фиг. 4 является блок-схемой последовательности операций примерного способа для того, чтобы замедлять транспортное средство фиг. 1A-1B через контроллер автономного движения в режиме регулирования скорости по фиг. 2.
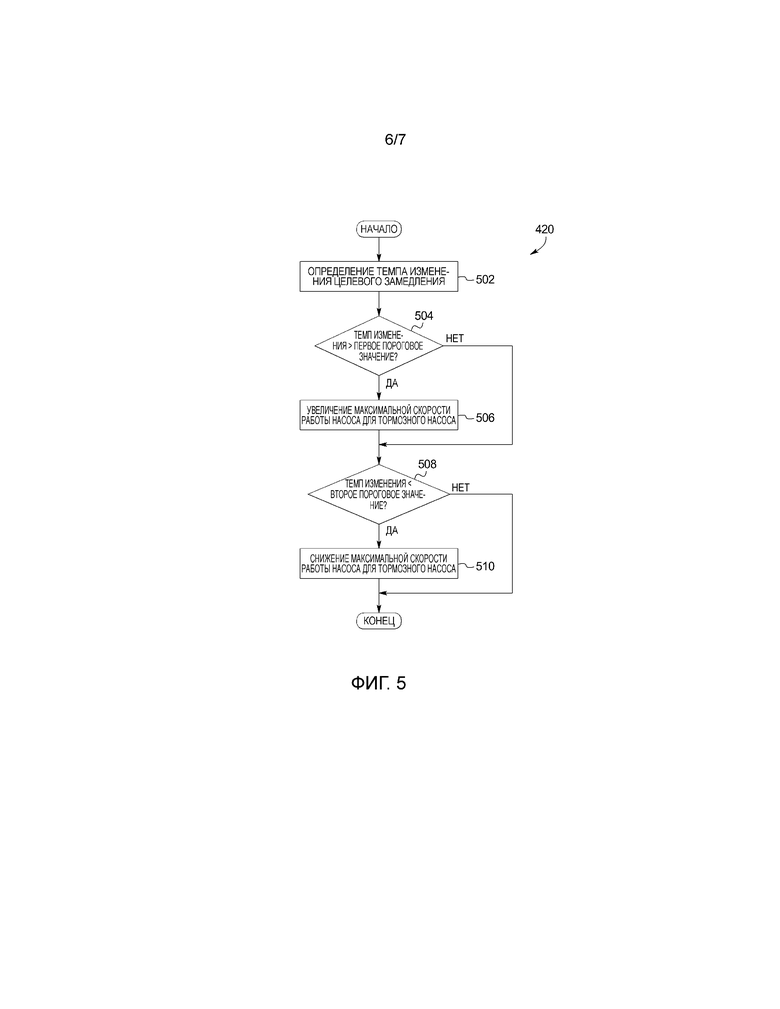
[0014] Фиг. 5 является блок-схемой последовательности операций примерного способа для того, чтобы регулировать максимальную скорость работы тормозного насоса тормозной системы по фиг. 2.
[0015] Фиг. 6 является блок-схемой последовательности операций другого примерного способа для того, чтобы регулировать максимальную скорость работы тормозного насоса тормозной системы по фиг. 2.
Подробное описание примерных вариантов осуществления
[0016] Хотя изобретение может быть осуществлено в различных формах, на чертежах показаны и далее описываются некоторые примерные и неограничивающие варианты осуществления, с пониманием того, что настоящее раскрытие сущности должно считаться примерным пояснением изобретения и не имеет намерение ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
[0017] Обычно, транспортное средство включает в себя тормозную систему, чтобы останавливать, сбавлять скорость и/или иным образом замедлять транспортное средство. Некоторые тормозные системы включают в себя педаль тормоза, тормозной цилиндр, тормозные магистрали и колесные тормоза (например, дисковые тормоза, барабанные тормоза и т.д.). Например, тормозная система может включать в себя колесный тормоз для каждого соответствующего колеса транспортного средства. Чтобы замедлять транспортное средство, тормозной цилиндр таких тормозных систем формирует гидравлическое давление, когда водитель нажимает педаль тормоза. Затем, гидравлическое давление подается в колесные тормоза через тормозные магистрали, которые заставляют колесные тормоза зацеплять колеса транспортного средства для того, чтобы ограничивать и/или сдерживать вращение колес. Как результат, тормозная система заставляет транспортное средство останавливаться, сбавлять скорость и/или иным образом замедляет транспортное средство.
[0018] Типично, тормозной насос имеет максимальную рабочую скорость, которая ограничивает скорость, с которой работает тормозной насос. Таким образом, тормозной насос может работать при значении, равном или ниже, но не может работать при значении выше максимальной рабочей скорости, чтобы формировать гидравлическое давление. При приеме сигнала из ACC-системы/деселератора транспортного средства для того, чтобы замедлять транспортное средство, в некоторых тормозных насосах происходит временное увеличение до максимальной рабочей скорости тормозного насоса. Затем, ток, потребляемый посредством тормозного насоса, может уменьшаться во времени, чтобы формировать требуемый темп замедления, ассоциированный с сигналом из ACC-системы/деселератора транспортного средства. Максимальная рабочая скорость типично задается до и/или в то время, когда тормозной насос устанавливается в транспортном средстве. В некоторых случаях, если максимальная рабочая скорость задается равной относительно низкому значению, максимальная рабочая скорость может потенциально предотвращать замедление транспортного средства с высоким темпом замедления, и/или увеличивает количество времени, которое требуется тормозному насосу для того, чтобы формировать высокий темп замедления. В других случаях, если максимальная рабочая скорость задается равной относительно высокому значению, максимальная рабочая скорость может потенциально заставлять транспортное средство дергаться при применении ACC-инструктированного замедления и/или формировать шум, вибрации, неплавность движения (NVH), которые слышат пассажиры транспортного средства, когда в тормозном насосе происходит увеличение до максимальной рабочей скорости.
[0019] Примерные способы, устройства и машиночитаемые носители, раскрытые в данном документе, регулируют максимальную скорость работы тормозного насоса транспортного средства в то время, когда транспортное средство работает. Максимальная скорость работы тормозного насоса регулируется в ходе работы системы адаптивного регулирования скорости движения транспортного средства на основе темпа изменения целевого замедления и/или разности между целевым замедлением и измеренным замедлением, чтобы обеспечивать возможность тормозному насосу формировать более высокие темпы замедления и формировать более низкие темпы замедления с уменьшенным подергиванием и/или уменьшенным NVH-уровнем, который слышат пассажиры в салоне транспортного средства.
[0020] Примеры, раскрытые в данном документе, включают в себя тормозной насос тормозной системы, который обеспечивает торможение для транспортного средства. Тормозной насос имеет максимальную скорость работы насоса, которая является регулируемой. Деселератор транспортного средства определяет целевое замедление для автономного замедления и отправляет сигнал в тормозной насос для того, чтобы замедлять транспортное средство при целевом замедлении. Дополнительно, регулятор максимальной скорости должен регулировать максимальную скорость работы насоса для тормозного насоса.
[0021] При использовании в данном документе, "максимальная скорость работы насоса", "максимальная скорость работы тормозного насоса" и "максимальная скорость работы тормозного насоса" означают регулируемую настройку тормозного насоса, которая ограничивает скорость работы тормозного насоса. Например, при приеме сигнала, чтобы инициировать торможение транспортного средства, в тормозном насосе происходит увеличение, но без превышения, до максимальной скорости работы насоса. Дополнительно, максимальная скорость работы насоса для тормозного насоса ограничена посредством физической заглушки ограничения скорости работы тормозного насоса. При использовании в данном документе, "верхний предел скорости работы насоса" и "верхний предел тормозного насоса" означают наибольшую скорость работы насоса, при которой тормозной насос физически имеет возможность работать.
[0022] При использовании в данном документе, "целевое замедление" означает значение замедления, при котором транспортное средство должно замедляться. При использовании в данном документе, "автономное замедление" означает замедление, которое инициируется посредством автономной системы (например, системы, в которой функции движения управляются посредством транспортного средства без прямого ввода от водителя) или полуавтономной системы (например, системы, в которой некоторые стандартные функции движения управляются посредством транспортного средства). Например, автономное замедление может инициироваться через систему автономного регулирования скорости движения. При использовании в данном документе, "регулирование скорости движения" и "система регулирования скорости движения" означают систему транспортного средства, которая автономно поддерживает скорость, с которой движется транспортное средство. При использовании в данном документе, "автономное регулирование скорости движения", "адаптивное регулирование скорости движения", "система автономного регулирования скорости движения" и "система адаптивного регулирования скорости движения" означают систему регулирования скорости движения, которая также автономно регулирует скорость, с которой движется транспортное средство, чтобы поддерживать безопасное расстояние между транспортным средством и обнаруженным объектом (например, другим транспортным средством).
[0023] В примерах, раскрытых в данном документе, регулятор максимальной скорости определяет темп изменения целевого замедления во времени и регулирует максимальную скорость работы насоса на основе темпа изменения. Темп изменения целевого замедления может увеличиваться, если транспортное средство быстро приближается к другому объекту, и/или максимальная скорость работы насоса задается равной слишком низкому значению. С другой стороны, темп изменения целевого замедления может снижаться, если транспортное средство медленно приближается к другому объекту, и/или максимальная скорость работы насоса задается равной слишком высокому значению.
[0024] В некоторых таких примерах, регулятор максимальной скорости увеличивает максимальную скорость работы насоса в ответ на определение того, что темп изменения превышает предварительно определенное пороговое значение (например, первое пороговое значение), снижает максимальную скорость работы насоса в ответ на определение того, что темп изменения меньше другого предварительно определенного порогового значения (например, второго порогового значения), и/или иным образом поддерживает максимальную скорость работы насоса (например, максимальную скорость работы насоса по умолчанию). Например, регулятор максимальной скорости увеличивает максимальную скорость работы насоса на предварительно определенное значение (например, первое значение) на основе разности между темпом изменения и первым пороговым значением и/или снижает максимальную скорость работы насоса на другое предварительно определенное значение (например, второе значение) на основе разности между темпом изменения и вторым пороговым значением. В других таких примерах, регулятор максимальной скорости увеличивает максимальную скорость работы насоса в ответ на обнаружение увеличения темпа изменения целевого замедления, снижает максимальную скорость работы насоса в ответ на обнаружение снижения темпа изменения целевого замедления и/или иным образом поддерживает максимальную скорость работы насоса.
[0025] В других примерах, раскрытых в данном документе, датчик транспортного средства (например, первый датчик, к примеру, акселерометр или датчик скорости транспортного средства) обнаруживает измеренное замедление, и регулятор максимальной скорости регулирует максимальную скорость работы насоса на основе разности между целевым замедлением и измеренным замедлением. При использовании в данном документе, "измеренное замедление" означает замедление, при котором транспортное средство измеряется (например, через акселерометр и/или датчик скорости транспортного средства) как замедляющееся. Измеренное замедление может быть меньше целевого замедления, если транспортное средство быстро приближается к другому объекту, и/или максимальная скорость работы насоса задается равной слишком низкому значению. С другой стороны, измеренное замедление может превышать целевое замедление, если транспортное средство медленно приближается к другому объекту, и/или максимальная скорость работы насоса задается равной слишком высокому значению.
[0026] В некоторых таких примерах, регулятор максимальной скорости увеличивает максимальную скорость работы насоса в ответ на определение того, что измеренное замедление меньше целевого замедления, снижает максимальную скорость работы насоса в ответ на определение того, что измеренное замедление превышает целевое замедление, и/или иным образом поддерживает максимальную скорость работы насоса (например, максимальную скорость работы насоса по умолчанию). Например, регулятор максимальной скорости увеличивает максимальную скорость работы насоса на предварительно определенное значение (например, первое значение) и/или снижает максимальную скорость работы насоса на другое предварительно определенное значение (например, второе значение) на основе разности между измеренным замедлением и целевым замедлением. В других таких примерах, регулятор максимальной скорости увеличивает максимальную скорость работы насоса в ответ на определение того, что измеренное замедление меньше целевого замедления, по меньшей мере, на предварительно определенное пороговое значение (например, первое пороговое значение), снижает максимальную скорость работы насоса в ответ на определение того, что измеренное замедление превышает целевое замедление, по меньшей мере, на другое предварительно определенное пороговое значение (например, первое пороговое значение), и/или иным образом поддерживает максимальную скорость работы насоса.
[0027] В примерах, раскрытых в данном документе, транспортное средство включает в себя датчик (например, второй датчик, такой как лидарный датчик, радарный датчик, ультразвуковой датчик, камера и т.д.), который должен обнаруживать объект (например, другое транспортное средство) впереди транспортного средства. В таких примерах, деселератор транспортного средства отправляет сигнал в тормозной насос для того, чтобы поддерживать буферное расстояние между транспортным средством и объектом. При использовании в данном документе, "буферное расстояние" означает расстояние, на котором транспортное средство безопасно движется позади объекта (например, другого транспортного средства). Например, деселератор транспортного средства определяет буферное расстояние на основе конструктивных характеристик транспортного средства (например, размера, веса т.д.), скорости транспортного средства, ускорения транспортного средства, скорости другого объекта, ускорения других объектов и/или текущих погодных условий. Дополнительно или альтернативно, деселератор транспортного средства определяет целевое замедление на основе конструктивных характеристик транспортного средства (например, размера, веса и т.д.), скорости транспортного средства, ускорения транспортного средства, скорости другого объекта, ускорения другого объекта и/или текущих погодных условий. В некоторых примерах, деселератор транспортного средства определяет относительную скорость между транспортным средством и объектом через второй датчик. В некоторых примерах, транспортное средство включает в себя датчик скорости транспортного средства для того, чтобы определять скорость и/или ускорение транспортного средства.
[0028] Обращаясь к чертежам, фиг. 1A и 1B иллюстрирует примерное транспортное средство 100 в соответствии с идеями в данном документе. Более конкретно, фиг. 1A иллюстрирует транспортное средство 100 (например, первое транспортное средство), отдаленное от объекта 102 (например, другого транспортного средства, второго транспортного средства) на первое расстояние 104, превышающее буферное расстояние 106, и фиг. 1B иллюстрирует транспортное средство 100, отдаленное от объекта 102 на буферное расстояние 106.
[0029] Транспортное средство 100 может представлять собой стандартное транспортное средство с бензиновым двигателем, гибридное транспортное средство, электротранспортное средство, транспортное средство на топливных элементах и/или транспортное средство с любым другим типом реализации мобильности. Транспортное средство 100 включает в себя части, связанные с мобильностью, такие как силовая передача с двигателем, трансмиссия, подвеска, карданный вал и/или колеса и т.д. Транспортное средство 100 может быть неавтономным, полуавтономным (например, некоторые стандартные функции движения управляются посредством транспортного средства 100) или автономным (например, функции движения управляются посредством транспортного средства 100 без прямого ввода от водителя). В проиллюстрированном примере, транспортное средство 100 включает в себя датчик 108, камеру 110, акселерометр 112, датчик 114 скорости транспортного средства, переключатель 116 регулирования скорости движения, тормозной насос 118 и контроллер 120 автономного движения в режиме регулирования скорости.
[0030] В проиллюстрированном примере, датчик 108 обнаруживает то, когда объект 102 находится впереди транспортного средства 100, и собирает данные, которые позволяют контроллеру 120 автономного движения в режиме регулирования скорости (например, деселератору 208 транспортного средства по фиг. 2 контроллера 120 автономного движения в режиме регулирования скорости) определять расстояние и/или относительную скорость между транспортным средством 100 и объектом 102 (например, первое расстояние 104 по фиг. 1A, буферное расстояние 106 по фиг. 1B).
[0031] Датчик 108 представляет собой лидарный датчик, радарный датчик, ультразвуковой датчик и/или любой другой тип датчика, который имеет возможность обнаруживать объект впереди транспортного средства 100 и собирать информацию, чтобы обеспечивать возможность контроллеру 120 автономного движения в режиме регулирования скорости определять расстояние и/или относительную скорость между транспортным средством 100 и объектом 102. Дополнительно или альтернативно, камера 110 транспортного средства 100 обнаруживает то, когда объект 102 находится впереди транспортного средства 100, и собирает данные, чтобы обеспечивать возможность контроллеру 120 автономного движения в режиме регулирования скорости определять расстояние и/или относительную скорость между транспортным средством 100 и объектом 102.
[0032] В проиллюстрированном примере, акселерометр 112 измеряет или обнаруживает ускорение и/или замедление транспортного средства 100. Например, акселерометр 112 обнаруживает или измеряет измеренное замедление транспортного средства 100 при инструктировании посредством контроллера 120 автономного движения в режиме регулирования скорости тормозной системе (например, тормозной системе 200 по фиг. 2) замедлять транспортное средство 100 при целевом замедлении. Дополнительно, датчик 114 скорости транспортного средства измеряет или обнаруживает скорость транспортного средства 100. В некоторых примерах, скорость, измеряемая или обнаруженная посредством датчика 114 скорости транспортного средства, используется для того, чтобы определять ускорение и/или замедление (например, измеренное замедление) транспортного средства 100.
[0033] Переключатель 116 регулирования скорости движения проиллюстрированного примера обеспечивает возможность водителю транспортного средства 100 активировать и/или деактивировать систему регулирования скорости движения (например, систему адаптивного регулирования скорости движения) транспортного средства 100. Например, переключатель 116 регулирования скорости движения представляет собой нажимную кнопку, рычажный переключатель и/или любой другой тип переключателя, который водитель может нажимать с возможностью включать и/или выключать систему адаптивного регулирования скорости движения транспортного средства 100.
[0034] Дополнительно, тормозной насос 118 формирует или создает гидравлическое давление и предоставляет гидравлическое давление в колесные тормоза (например, колесные тормоза 206 по фиг. 2) с тем, чтобы заставлять транспортное средство 100 замедляться. Например, когда система адаптивного регулирования скорости движения транспортного средства 100 работает, и датчик 108 и/или камера 110 обнаруживает объект 102, тормозной насос 118 принимает сигнал из контроллера 120 автономного движения в режиме регулирования скорости для того, чтобы замедлять транспортное средство 100 при целевом замедлении. Дополнительно или альтернативно, тормозной насос 118 может принимать сигнал из педали тормоза, когда водитель управляет транспортным средством вручную и/или полуавтономно.
[0035] Дополнительно, тормозной насос 118 имеет максимальную скорость работы насоса, которая является регулируемой. Максимальная скорость работы насоса ограничивает скорость работы тормозного насоса 118 по мере того, как тормозной насос 118 вырабатывает гидравлическую мощность, и в силу этого может затрагивать замедление транспортного средства 100, получающееся в результате работы тормозного насоса 118. Тормозной насос 118 также имеет верхний предел скорости работы насоса, который основан на физических и/или конструктивных характеристиках тормозного насоса 118 и его компонентов. Верхний предел скорости работы насоса задает наибольшее потенциальное значение максимальной скорости работы насоса (т.е. максимальная скорость работы насоса не может превышать верхний предел скорости работы насоса), и в силу этого может затрагивать замедление транспортного средства 100, получающееся в результате работы тормозного насоса 118.
[0036] Контроллер 120 автономного движения в режиме регулирования скорости проиллюстрированного примера управляет системой адаптивного регулирования скорости движения транспортного средства 100. Например, контроллер 120 автономного движения в режиме регулирования скорости автономно поддерживает скорость, на которой движется транспортное средство 100, и/или регулирует скорость, на которой движется транспортное средство 100, чтобы поддерживать безопасное расстояние (например, буферное расстояние 106) между транспортным средством 100 и обнаруженным объектом (например, объектом 102). Когда датчик 108 и/или камера 110 обнаруживает объект 102 впереди транспортного средства 100, контроллер 120 автономного движения в режиме регулирования скорости автономно замедляет транспортное средство 100, чтобы поддерживать буферное расстояние 106 между транспортным средством 100 и объектом 102, посредством инструктирования тормозному насосу 118 замедлять транспортное средство 100 при целевом замедлении.
[0037] Например, если транспортное средство 100 приближается к объекту 102 и отдалено от объекта 102 на первое расстояние 104, которое превышает буферное расстояние 106 (фиг. 1A), контроллер 120 автономного движения в режиме регулирования скорости определяет целевое замедление, которое обеспечивает возможность отдаления транспортного средства 100 от объекта 102, по меньшей мере, на буферное расстояние 106 (фиг. 1B). Если расстояние между транспортным средством 100 и объектом 102 меньше буферного расстояния 106, контроллер 120 автономного движения в режиме регулирования скорости должен определять целевое замедление, которое быстро приводит к отдалению транспортного средства 100 от объекта 102, по меньшей мере, на буферное расстояние 106 (фиг. 1B).
[0038] Фиг. 2 является блок-схемой контроллера 120 автономного движения в режиме регулирования скорости и тормозной системы 200 транспортного средства 100. Как проиллюстрировано на фиг. 2, тормозная система 200 включает в себя тормозной насос 118, тормозные магистрали 202, клапан 204 тормозной магистрали и колесные тормоза 206 (например, дисковые тормоза, барабанные тормоза и т.д.). Дополнительно, контроллер 120 автономного движения в режиме регулирования скорости включает в себя деселератор 208 транспортного средства, который отправляет сигнал в тормозную систему 200, чтобы замедлять транспортное средство 100, и регулятор максимальной скорости, который регулирует максимальную скорость работы насоса транспортного средства 100.
[0039] При работе, тормозной насос 118 принимает сигнал из контроллера 120 автономного движения в режиме регулирования скорости для того, чтобы замедлять транспортное средство 100. Например, тормозной насос 118 принимает сигнал для того, чтобы замедлять транспортное средство при целевом замедлении. На основе целевого замедления, тормозной насос 118 формирует или создает гидравлическое давление, которое предоставляется в колесные тормоза 206 через тормозные магистрали 202 и клапан 204 тормозной магистрали. В проиллюстрированном примере, часть тормозных магистралей 202 соединяет с возможностью обмена жидкостью тормозной насос 118 и клапан 204 тормозной магистрали, и другие части тормозных магистралей 202 соединяют с возможностью обмена жидкостью тормозной насос 118 с соответствующими колесными тормозами 206. При приеме гидравлического давления, каждый из колесных тормозов 206 зацепляет соответствующее колесо транспортного средства 100, чтобы уменьшать вращение колес для того, чтобы замедлять транспортное средство 100. В проиллюстрированном примере, тормозная система 200 включает в себя четыре колесных тормоза 206, каждый их которых взаимодействует с различным колесом четырехколесного транспортного средства. В других примерах, тормозная система 200 может включать в себя большее или меньшее колесных тормозов 206 для транспортных средств, имеющих большее, меньшее или идентичное число колес.
[0040] В проиллюстрированном примере, деселератор 208 транспортного средства контроллера 120 автономного движения в режиме регулирования скорости определяет целевое замедление для автономного замедления транспортного средства 100. Дополнительно, деселератор 208 транспортного средства отправляет сигнал в тормозной насос 118 тормозной системы 200. Сигнал инструктирует тормозному насосу 118 формировать гидравлическое давление, которое должно заставлять колесные тормоза 206 замедлять транспортное средство 100 при целевом замедлении. Целевое замедление, определенное посредством деселератора 208 транспортного средства, должно обеспечивать возможность отдаления транспортного средства 100 от объекта 102, по меньшей мере, на буферное расстояние 106 (например, чтобы поддерживать буферное расстояние 106 между транспортным средством 100 и объектом 102).
[0041] В некоторых примерах, деселератор 208 транспортного средства определяет буферное расстояние 106 на основе измеренной скорости 212 транспортного средства 100, измеренного замедления 214 (или ускорения) транспортного средства 100, конструктивных характеристик транспортного средства 100 (например, размера, веса и т.д.), скорости объекта 102, замедления или ускорения объекта 102 и/или текущих погодных условий. Дополнительно или альтернативно, деселератор 208 транспортного средства определяет целевое замедление на основе измеренной скорости 212 транспортного средства 100, измеренного замедления 214 транспортного средства 100, относительной скорости между транспортным средством 100 и объектом 102, расстояния между транспортным средством 100 и объектом 102 и/или текущих погодных условий.
[0042] Например, деселератор 208 транспортного средства контроллера 120 автономного движения в режиме регулирования скорости собирает измеренную скорость 212 из датчика 114 скорости транспортного средства транспортного средства 100. Деселератор 208 транспортного средства собирает измеренное замедление 214 из акселерометра 112 и/или определяет измеренное замедление 214 на основе измеренной скорости 212. Деселератор 208 транспортного средства определяет расстояние (например, первое расстояние 104) между транспортным средством 100 и объектом 102 на основе относительного местоположения 216 объекта для объекта 102 относительно транспортного средства 100. Например, деселератор 208 транспортного средства собирает относительное местоположение 216 объекта из датчика 108 и/или камеры 110 транспортного средства 100. Дополнительно, деселератор 208 транспортного средства определяет скорость, замедление или ускорение и/или относительную скорость объекта 102 на основе измеренной скорости 212, измеренного замедления 214 и/или относительного местоположения 216 объекта.
[0043] Дополнительно, регулятор 210 максимальной скорости контроллера 120 автономного движения в режиме регулирования скорости регулирует максимальную скорость работы насоса для тормозного насоса 118. Например, регулятор 210 максимальной скорости отправляет сигнал в тормозной насос 118, чтобы регулировать максимальную скорость работы насоса для тормозного насоса 118. В некоторых примерах, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса, чтобы обеспечивать возможность тормозному насосу 118 формировать увеличенное гидравлическое давление, чтобы обеспечивать возможность тормозной системе 200 увеличивать замедление транспортного средства 100 и/или снижать количество времени, требуемое для тормозной системы 200, чтобы формировать целевое замедление. В других примерах, в которых максимальная скорость работы насоса для тормозного насоса 118 обеспечивает возможность транспортному средству 100 замедляться при целевом замедлении, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса, чтобы уменьшать подергивание, получающееся в результате резкого замедления транспортного средства, и/или уменьшать NVH-уровни, сформированные посредством тормозного насоса 118. Транспортное средство 100 в противном случае потенциально может дергаться и/или приводить к высоким NVH-уровням, которые слышат пассажиры в салоне транспортного средства 100 в результате увеличения в тормозном насосе 118 до максимальной скорости работы насоса при приеме сигнала из деселератора 208 транспортного средства для того, чтобы замедлять транспортное средство 100 при целевом замедлении. Например, регулятор 210 максимальной скорости уменьшает NVH-уровни, которые слышат пассажиры в салоне, когда транспортное средство 100 движется с низким темпом изменения скорости, и в тормозном насосе 118 происходит увеличение до максимальной скорости работы насоса.
[0044] В некоторых примерах, регулятор 210 максимальной скорости регулирует максимальную скорость работы насоса на основе темпа изменения целевого замедления во времени. Например, регулятор 210 максимальной скорости определяет первое целевое замедление в первый момент времени, определяет второе целевое замедление во второй момент времени, отличающийся от первого момента времени, определяет темп изменения между первым целевым замедлением и вторым целевым замедлением и определяет то, следует или нет регулировать максимальную скорость работы насоса, на основе темпа изменения. Целевое замедление может изменяться на основе изменений во времени измеренной скорости212, измеренного замедления 214, относительного местоположения 216 объекта и т.д.
[0045] Темп изменения целевого замедления может увеличиваться, если транспортное средство 100 быстро приближается к объекту 102, и/или максимальная скорость работы насоса для тормозного насоса 118 задается равной слишком низкому значению. В таких примерах, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса для тормозного насоса 118 в ответ на обнаружение увеличения темпа изменения целевого замедления, чтобы обеспечивать возможность тормозному насосу 118 формировать увеличенное гидравлическое давление, ассоциированное с большим целевым замедлением, и/или снижать количество времени, требуемое для того, чтобы формировать целевое замедление. Например, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса на предварительно определенное значение (например, первое значение) на основе темпа, с которым увеличивается целевое замедление.
[0046] С другой стороны, темп изменения целевого замедления может снижаться, если транспортное средство 100 медленно приближается к объекту 102, и/или максимальная скорость работы насоса задается равной слишком высокому значению. В таких примерах, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса для тормозного насоса 118 в ответ на обнаружение снижения темпа изменения целевого замедления, чтобы уменьшать подергивание транспортного средства 100, получающееся в результате резкого замедления транспортного средства 100, и/или уменьшать NVH-уровень, получающийся в результате работы тормозного насоса 118 на/около максимальной скорости работы насоса. Например, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса на предварительно определенное значение (например, второе значение) на основе темпа, с которым снижается целевое замедление.
[0047] В некоторых примерах, в которых регулятор 210 максимальной скорости регулирует максимальную скорость работы насоса на основе темпа изменения целевого замедления, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса в ответ на определение того, что темп изменения превышает предварительно определенное пороговое значение (например, первое пороговое значение). Дополнительно, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса в ответ на определение того, что темп изменения меньше другого предварительно определенного порогового значения (например, второго порогового значения). Например, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса на предварительно определенное значение (например, первое значение) на основе разности между темпом изменения и первым пороговым значением и снижает максимальную скорость работы насоса на другое предварительно определенное значение (например, второе значение) на основе разности между темпом изменения и вторым пороговым значением. Дополнительно, регулятор 210 максимальной скорости поддерживает максимальную скорость работы насоса, если темп изменения находится между первым пороговым значением и вторым пороговым значением.
[0048] В других примерах, регулятор 210 максимальной скорости регулирует максимальную скорость работы насоса на основе разности между целевым замедлением и измеренным замедлением 214. Например, регулятор 210 максимальной скорости регулирует максимальную скорость работы насоса, если целевое замедление превышает измеренное замедление 214 (например, на предварительно определенное пороговое значение), и/или если измеренное замедление 214 превышает целевое замедление (например, на предварительно определенное пороговое значение).
[0049] Целевое замедление может превышать измеренное замедление 214, если транспортное средство 100 быстро приближается к объекту 102, и/или максимальная скорость работы насоса для тормозного насоса 118 задается равной слишком низкому значению. В таких примерах, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса для тормозного насоса 118 в ответ на обнаружение того, что измеренного замедления 214 меньше целевого замедления, чтобы формировать увеличенное гидравлическое давление, ассоциированное с большим целевым замедлением, и/или снижать количество времени, требуемое для того, чтобы формировать целевое замедление. Например, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса на предварительно определенное значение (например, первое значение) на основе разности между измеренным замедлением 214 и целевым замедлением.
[0050] С другой стороны, измеренное замедление 214 может превышать целевое замедление, если транспортное средство 100 медленно приближается к объекту 102, и/или максимальная скорость работы насоса задается равной слишком высокому значению. В таких примерах, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса для тормозного насоса 118 в ответ на обнаружение измеренного замедления 214 меньше целевого замедления, чтобы уменьшать подергивание и/или уменьшать NVH-уровень. Например, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса на предварительно определенное значение (например, второе значение) на основе разности между измеренным замедлением 214 и целевым замедлением.
[0051] Дополнительно, в некоторых примерах, в которых регулятор 210 максимальной скорости регулирует максимальную скорость работы насоса на основе разности между измеренным замедлением 214 и целевым замедлением, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса в ответ на определение того, что измеренное замедление 214 меньше целевого замедления, по меньшей мере, на предварительно определенное пороговое значение (например, первое пороговое значение). Дополнительно, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса в ответ на определение того, что измеренное замедление 214 превышает целевое замедление, по меньшей мере, на другое предварительно определенное пороговое значение (например, второе пороговое значение). Например, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса на предварительно определенное значение (например, первое значение) на основе разности между первым пороговым значением и разностью между измеренным замедлением 214 и целевым замедлением. Регулятор 210 максимальной скорости снижает максимальную скорость работы насоса на другое предварительно определенное значение (например, второе значение) на основе разности между вторым пороговым значением и разностью между измеренным замедлением 214 и целевым замедлением. Дополнительно, регулятор 210 максимальной скорости поддерживает максимальную скорость работы насоса, если разность между измеренным замедлением 214 и целевым замедлением находится между первым пороговым значением и вторым пороговым значением.
[0052] В проиллюстрированном примере, регулятор 210 максимальной скорости регулирует максимальную скорость работы насоса для тормозного насоса 118, когда транспортное средство 100 управляется через систему адаптивного регулирования скорости движения. В других примерах, регулятор 210 максимальной скорости может регулировать максимальную скорость работы насоса для тормозного насоса 118, когда транспортное средство 100 не управляется через систему адаптивного регулирования скорости движения (например, транспортное средство 100 управляется вручную и/или полуавтономно водителем). В таких примерах, регулятор 210 максимальной скорости, который регулирует максимальную скорость работы насоса для тормозного насоса 118, может быть внешним для контроллера 120 автономного движения в режиме регулирования скорости.
[0053] Фиг. 3 является блок-схемой электронных компонентов 300 транспортного средства 100. Как проиллюстрировано на фиг. 3, электронные компоненты 300 включают в себя бортовую вычислительную платформу 302, камеру 110, переключатель 116 регулирования скорости движения, датчики 304, электронные модули 306 управления (ECU) и шину 308 данных транспортного средства.
[0054] Бортовая вычислительная платформа 302 включает в себя модуль микроконтроллера, контроллер или процессор 310 и запоминающее устройство 312. В некоторых примерах, процессор 310 бортовой вычислительной платформы 302 сконструирован с возможностью включать в себя деселератор 208 транспортного средства, регулятор 210 максимальной скорости и/или, если обобщить, контроллер 120 автономного движения в режиме регулирования скорости. Альтернативно, в некоторых примерах, деселератор 208 транспортного средства, регулятор 210 максимальной скорости и/или, если обобщить, контроллер 120 автономного движения в режиме регулирования скорости включены в другой электронный модуль управления (ECU) (например, модуль 218 управления тормозом, модуль тормозного насоса и т.д.) с собственным процессором 310 и запоминающим устройством 312. Процессор 310 может представлять собой любое подходящее устройство обработки или набор устройств обработки, таких как, но не только, микропроцессор, микроконтроллерная платформа, интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGA) и/или одна или более специализированных интегральных схем (ASIC). Запоминающее устройство 312 может представлять собой энергозависимое запоминающее устройство (например, RAM, включающее в себя энергонезависимое RAM, магнитное RAM, ферроэлектрическое RAM и т.д.), энергонезависимое запоминающее устройство (например, запоминающее устройство на дисках, флэш-память, EPROM, EEPROM, энергонезависимое полупроводниковое запоминающее устройство на мемристорах и т.д.), запоминающее устройство без перезаписи (например, EPROM), постоянные запоминающие устройства и/или устройства хранения данных с высокой пропускной способностью (например, жесткие диски, полупроводниковые накопители и т.д.). В некоторых примерах, запоминающее устройство 312 включает в себя несколько видов запоминающего устройства, в частности, энергозависимое запоминающее устройство и энергонезависимое запоминающее устройство.
[0055] Запоминающее устройство 312 представляет собой машиночитаемые носители, в которые могут встраиваться один или более наборов инструкций, к примеру, программное обеспечение для осуществления способов настоящего раскрытия сущности. Инструкции могут осуществлять один или более способов или логику, как описано в данном документе. Например, инструкции постоянно размещаются полностью или, по меньшей мере, частично, в любом одном или более из запоминающего устройства 312, машиночитаемого носителя и/или в процессоре 310 во время выполнения инструкций.
[0056] Термины "энергонезависимый машиночитаемый носитель" и "машиночитаемый носитель" включают в себя один носитель или несколько носителей, к примеру, централизованную или распределенную базу данных и/или ассоциированные кэши и серверы, которые сохраняют один или более наборов инструкций. Дополнительно, термины "энергонезависимый машиночитаемый носитель" и "машиночитаемый носитель" включают в себя любой материальный носитель, который допускает хранение, кодирование или перенос набора инструкций для выполнения посредством процессора, либо которые инструктируют системе осуществлять любые один или более способов или операций, раскрытых в данном документе. При использовании в данном документе, термин "машиночитаемый носитель" явно задается таким образом, чтобы включать в себя любой тип машиночитаемого устройства хранения данных и/или диска хранения и исключать распространяющиеся сигналы.
[0057] Датчики 304 размещаются в/вокруг транспортного средства 100, чтобы отслеживать свойства транспортного средства 100 и/или окружения, в котором расположено транспортное средство 100. Один или более датчиков 304 могут монтироваться для того, чтобы измерять свойства за пределами транспортного средства 100. Дополнительно или альтернативно, один или более датчиков 304 могут монтироваться в салоне транспортного средства 100 или в кузове транспортного средства 100 (например, в отсеке для двигателя, в нишах для колес и т.д.) для того, чтобы измерять свойства в салоне транспортного средства 100. Например, датчики 304 включают в себя акселерометры, одометры, тахометры, датчики движения в продольном направлении и направлении относительно вертикальной оси, датчики скорости вращения колес, микрофоны, датчики давления в шинах, биометрические датчики и/или датчики любого другого подходящего типа. В проиллюстрированном примере, датчики 304 включают в себя радарный датчик 314, лидарный датчик 316, акселерометр 112 и датчик 114 скорости транспортного средства. Радарный датчик 314 и/или лидарный датчик 316 могут представлять собой датчик 108 по фиг. 1. Например, радарный датчик 314 обнаруживает и находит объект 102 через радиоволны, и лидарный датчик 316 обнаруживает и находит объект 102 через лазеры.
[0058] ECU 306 отслеживают и управляют подсистемами транспортного средства 100. Например, ECU 306 представляют собой дискретные наборы электронных схем, которые включают в себя собственные схемы (например, интегральные схемы, микропроцессоры, запоминающее устройство, устройство хранения данных и т.д.) и микропрограммное обеспечение, датчики, актуаторы и/или монтажные устройства крепления. ECU 306 передают и обмениваются информацией через шину данных транспортного средства (например, шину 308 данных транспортного средства). Дополнительно, ECU 306 могут передавать свойства (например, состояние ECU 306, показания датчиков, состояние управления, коды ошибок и диагностические коды и т.д.) в и/или принимать запросы друг от друга. Например, транспортное средство 100 может иметь семьдесят или более ECU 306, которые позиционируются в различных местоположениях вокруг транспортного средства 100 и функционально соединяются посредством шины 308 данных транспортного средства. В проиллюстрированном примере, ECU 306 включают в себя модуль 318 управления тормозом, модуль 320 управления двигателем и модуль 322 управления системами в кузове. Например, модуль 318 управления тормозом принимает сигнал из деселератора 208 транспортного средства контроллера 120 автономного движения в режиме регулирования скорости и/или из педали тормоза, чтобы замедлять транспортное средство 100, и отправляет сигнал в тормозной насос 118 тормозной системы 200, чтобы замедлять транспортное средство 100 при целевом замедлении. Дополнительно, модуль 320 управления двигателем регулирует и/или управляет рабочими характеристиками (например, ускорением) двигателя транспортного средства 100. Модуль 322 управления системами в кузове управляет одной или более подсистем во всем транспортном средстве 100, таких как окна с сервоприводом стекла, электрические замки, система иммобилайзера, зеркала с электроскладыванием и т.д. Например, модуль 322 управления системами в кузове включает в себя схемы, которые приводят в действие одно или более из реле (например, чтобы управлять стеклоочистительной жидкостью и т.д.), щеточных электромоторов постоянного тока (DC) (например, чтобы управлять сиденьями с электроприводом, электрическими замками, окнами с сервоприводом стекла, стеклоочистителями и т.д.), шаговых электромоторов, светодиодов и т.д.
[0059] Шина 308 данных транспортного средства функционально соединяет камеру 110, переключатель 116 регулирования скорости движения, бортовую вычислительную платформу 302, датчики 304 и ECU 306. В некоторых примерах, шина 308 данных транспортного средства включает в себя одну или более шин данных. Шина 308 данных транспортного средства может реализовываться в соответствии с протоколом на основе шины контроллерной сети (CAN), заданным посредством Международной организации по стандартизации (ISO) 11898-1, протоколом на основе шины передачи данных мультимедийных систем (MOST), протоколом на основе шины гибкой передачи данных по CAN (CAN-FD) (ISO 11898-7) и/или протоколом на основе шины K-line (ISO 9141 и ISO 14230-1) и/или протоколом на основе шины Ethernet™ IEEE 802.3 (версия от 2002 года и далее) и т.д.
[0060] Фиг. 4 является блок-схемой последовательности операций примерного способа 400, чтобы замедлять транспортное средство через контроллер автономного движения в режиме регулирования скорости. Блок-схема последовательности операций способа по фиг. 4 представляет машиночитаемые инструкции, которые сохраняются в запоминающем устройстве (таком как запоминающее устройство 312 по фиг. 3) и включают в себя одну или более программ, которые, при выполнении посредством процессора (такого как процессор 310 по фиг. 3), инструктируют транспортному средству 100 реализовывать примерный деселератор 208 транспортного средства по фиг. 2, примерный регулятор 210 максимальной скорости по фиг. 2 и/или, если обобщить, примерный контроллер 120 автономного движения в режиме регулирования скорости фиг. 1-3. Хотя примерная программа описывается со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 4, альтернативно могут использоваться множество других способов реализации примерного деселератора 2 транспортного средства 08, примерного регулятора максимальной скорости и/или, если обобщить, примерного контроллера 120 автономного движения в режиме регулирования скорости. Например, порядок выполнения этапов может перекомпоновываться, изменяться, исключаться и/или комбинироваться, чтобы осуществлять способ 400. Дополнительно, поскольку способ 400 раскрыт в связи с компонентами фиг. 1-3, некоторые функции этих компонентов подробно не описываются ниже.
[0061] Первоначально, на этапе 402, контроллер 120 автономного движения в режиме регулирования скорости определяет то, обнаруживается или нет объект (например, объект 102) впереди транспортного средства 100 (например, через второй датчик). Например, контроллер 120 автономного движения в режиме регулирования скорости определяет то, обнаруживает либо нет датчик 108 (например, радарный датчик 314, лидарный датчик 316, ультразвуковой датчик), камера 110 и/или какой-либо другой датчик транспортного средства 100 присутствие объекта 102 впереди транспортного средства 100. Если объект не обнаруживается, способ 400 остается на этапе 402 до тех пор, пока объект не будет обнаружен. Если объект обнаруживается, способ 400 переходит к этапу 404.
[0062] На этапе 404, деселератор 208 транспортного средства контроллера 120 автономного движения в режиме регулирования скорости определяет расстояние (например, первое расстояние 104) между транспортным средством 100 и объектом 102, обнаруженным на этапе 402. Например, деселератор 208 транспортного средства определяет расстояние между транспортным средством 100 и объектом 102 на основе относительного местоположения 216 объекта, собранного из датчика 108 и/или камеры 110. В таких примерах, датчик 108 и/или камера 110 собирают относительное местоположение 216 объекта, чтобы идентифицировать местоположение объекта 102 относительно транспортного средства 100, и отправляют относительное местоположение 216 объекта в деселератор 208 транспортного средства.
[0063] На этапе 406, деселератор 208 транспортного средства определяет измеренную скорость 212 транспортного средства 100. Например, датчик 114 скорости транспортного средства измеряет измеренную скорость 212 транспортного средства 100, и деселератор 208 транспортного средства собирает измеренную скорость 212 из датчика 114 скорости транспортного средства. На этапе 408, деселератор 208 транспортного средства определяет измеренное замедление 214 или измеряемое ускорение транспортного средства 100 (например, через первый датчик). В некоторых примерах, акселерометр 112 измеряет измеренное замедление 214 транспортного средства 100, и деселератор 208 транспортного средства собирает измеренное замедление 214 из акселерометра 112. В других примерах, деселератор 208 транспортного средства определяет измеренное замедление 214 на основе измеренной скорости 212, которая собирается из датчика 114 скорости транспортного средства.
[0064] На этапе 410, деселератор 208 транспортного средства определяет относительную скорость объекта 102 относительно транспортного средства 100. Например, деселератор 208 транспортного средства определяет относительную скорость на основе измеренной скорости 212 транспортного средства 100 и относительного местоположения 216 объекта для объекта 102. Дополнительно, деселератор 208 транспортного средства может определять относительное ускорение между объектом 102 и транспортным средством 100 на основе измеренной скорости 212 транспортного средства 100 и относительного местоположения 216 объекта для объекта 102.
[0065] На этапе 412, деселератор 208 транспортного средства определяет буферное расстояние 106 между транспортным средством 100 и объектом 102, которое обеспечивает возможность транспортному средству 100 безопасно двигаться позади объекта 102. Например, деселератор 208 транспортного средства определяет буферное расстояние 106 на основе измеренной скорости 212 транспортного средства 100, измеренного замедления 214 транспортного средства 100, конструктивных характеристик транспортного средства 100 (например, размера, веса и т.д.), скорости объекта 102 относительно транспортного средства 100, ускорения объекта 102 относительно транспортного средства 100 и/или текущих погодных условий.
[0066] На этапе 414, деселератор 208 транспортного средства определяет то, следует или нет замедлять транспортное средство 100. Таким образом, деселератор 208 транспортного средства определяет замедлять транспортное средство 100, чтобы поддерживать буферное расстояние 106 между транспортным средством 100 и объектом 102. Например, деселератор 208 транспортного средства определяет замедлять транспортное средство 100, если транспортное средство 100 находится в пределах буферного расстояния 106 и/или должно находиться в пределах буферного расстояния 106 без замедления. Деселератор 208 транспортного средства может прогнозировать то, будет или нет транспортное средство 100 находиться в пределах буферного расстояния 106, на основе измеренной скорости 212 транспортного средства 100, измеренного замедления 214 транспортного средства 100, скорости объекта 102 относительно транспортного средства 100 и/или ускорения объекта 102 относительно транспортного средства 100. В ответ на определение посредством деселератора 208 транспортного средства того, что транспортное средство 100 не должно замедляться, способ 400 возвращается к этапу 402. В противном случае, в ответ на определение посредством деселератора 208 транспортного средства того, что транспортное средство 100 должно замедляться, способ 400 переходит к этапу 416.
[0067] На этапе 416, деселератор 208 транспортного средства определяет целевое замедление для транспортного средства 100. Например, деселератор 208 транспортного средства определяет целевое замедление на основе расстояния между транспортным средством 100 и объектом 102, измеренной скорости 212 транспортного средства 100, измеренного замедления 214 транспортного средства 100, относительной скорости объекта 102 относительно транспортного средства 100, относительного ускорения объекта 102 относительно транспортного средства 100 и/или текущих погодных условий. На этапе 418, деселератор 208 транспортного средства отправляет сигнал в тормозной насос 118 тормозной системы 200, чтобы замедлять транспортное средство 100 при целевом замедлении. При приеме сигнала, тормозной насос 118 формирует гидравлическое давление, которое предоставляется в колесные тормоза 206 через тормозные магистрали 202, чтобы замедлять транспортное средство 100.
[0068] На этапе 418, регулятор 210 максимальной скорости контроллера 120 автономного движения в режиме регулирования скорости определяет максимальную скорость работы насоса для тормозного насоса 118. Например, регулятор 210 максимальной скорости определяет то, следует или нет регулировать максимальную скорость работы насоса, на основе темпа изменения целевого замедления во времени и/или на основе разности между измеренным замедлением 214 и целевым замедлением. При определении посредством регулятора 210 максимальной скорости максимальной скорости работы насоса, способ 400 возвращается к этапу 402.
[0069] Фиг. 5 является блок-схемой последовательности операций примерного способа для того, чтобы реализовывать этап 420, чтобы регулировать максимальную скорость работы тормозного насоса системы торможения транспортного средства на основе темпа изменения целевого замедления. Блок-схема последовательности операций способа по фиг. 5 представляет машиночитаемые инструкции, которые сохраняются в запоминающем устройстве (таком как запоминающее устройство 312 по фиг. 3) и включают в себя одну или более программ, которые, при выполнении посредством процессора (такого как процессор 310 по фиг. 3), инструктируют транспортному средству 100 реализовывать примерный регулятор 210 максимальной скорости по фиг. 2. Хотя примерная программа описывается со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 5, альтернативно могут использоваться множество других способов реализации примерного регулятора 210 максимальной скорости. Например, порядок выполнения этапов по фиг. 5 может перекомпоновываться, изменяться, исключаться и/или комбинироваться, чтобы осуществлять способ для того, чтобы реализовывать этап 420. Дополнительно, поскольку способ по фиг. 5 для того, чтобы реализовывать этап 420, раскрыт в связи с компонентами фиг. 1-3, некоторые функции этих компонентов подробно не описываются ниже.
[0070] Первоначально, чтобы определять максимальную скорость работы насоса на основе темпа изменения целевого замедления, регулятор 210 максимальной скорости определяет темп изменения целевого замедления на этапе 502. Например, регулятор 210 максимальной скорости определяет первое целевое замедление в первый момент времени, определяет второе целевое замедление во второй момент времени, отличающийся от первого момента времени, и затем определяет темп изменения между первым целевым замедлением и вторым целевым замедлением.
[0071] На этапе 504, регулятор 210 максимальной скорости сравнивает темп изменения с первым пороговым значением (например, предварительно определенным пороговым значением). В ответ на определение посредством регулятора 210 максимальной скорости того, что темп изменения превышает первое пороговое значение, способ по фиг. 5 переходит к этапу 506, на котором регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса. Например, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса на первое предварительно определенное значение на основе разности между темпом изменения и первым пороговым значением. В других примерах, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса в ответ на обнаружение увеличения темпа изменения целевого замедления. При увеличении максимальной скорости работы насоса посредством регулятора 210 максимальной скорости на этапе 506, или в ответ на определение посредством регулятора 210 максимальной скорости того, что темп изменения не превышает первое пороговое значение, способ по фиг. 5 переходит к этапу 508.
[0072] На этапе 508, регулятор 210 максимальной скорости сравнивает темп изменения со вторым пороговым значением (например, предварительно определенным пороговым значением). В ответ на определение того, что темп изменения меньше второго порогового значения, способ по фиг. 5 переходит к этапу 510, на котором регулятор 210 максимальной скорости снижает максимальную скорость работы насоса. Например, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса на второе предварительно определенное значение на основе разности между темпом изменения и вторым пороговым значением. В других примерах, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса в ответ на обнаружение снижения темпа изменения целевого замедления. При снижении максимальной скорости работы насоса посредством регулятора 210 максимальной скорости на этапе 510, или в ответ на определение посредством регулятора 210 максимальной скорости того, что темп изменения не меньше второго порогового значения, способ по фиг. 5 завершается.
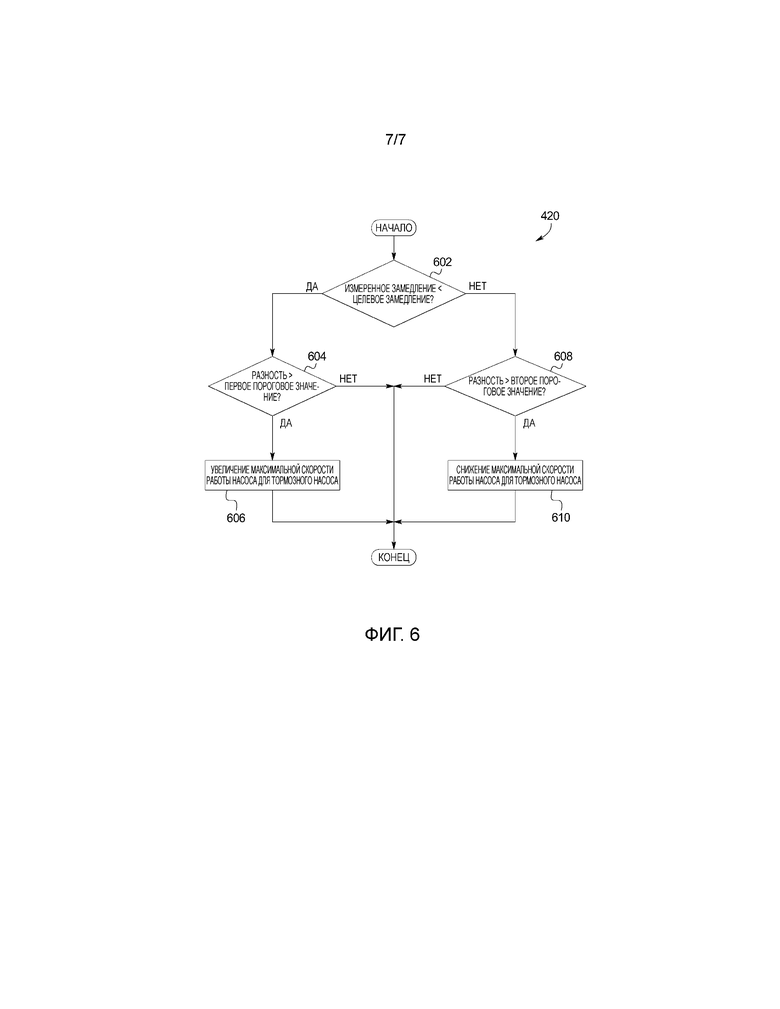
[0073] Фиг. 6 является блок-схемой последовательности операций другого примерного способа для того, чтобы реализовывать этап 420, чтобы регулировать максимальную скорость работы тормозного насоса системы торможения транспортного средства на основе разности между целевым замедлением и измеренным замедлением. Блок-схема последовательности операций способа по фиг. 6 представляет машиночитаемые инструкции, которые сохраняются в запоминающем устройстве (таком как запоминающее устройство 312 по фиг. 3) и включают в себя одну или более программ, которые, при выполнении посредством процессора (такого как процессор 310 по фиг. 3), инструктируют транспортному средству 100 реализовывать примерный регулятор 210 максимальной скорости по фиг. 2. Хотя примерная программа описывается со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 6, альтернативно могут использоваться множество других способов реализации примерного регулятора 210 максимальной скорости. Например, порядок выполнения этапов по фиг. 6 может перекомпоновываться, изменяться, исключаться и/или комбинироваться, чтобы осуществлять способ для того, чтобы реализовывать этап 420. Дополнительно, поскольку способ по фиг. 6 для того, чтобы реализовывать этап 420, раскрыт в связи с компонентами фиг. 1-3, некоторые функции этих компонентов подробно не описываются ниже.
[0074] Первоначально, чтобы определять максимальную скорость работы насоса на основе разности между измеренным замедлением 214 и целевым замедлением, регулятор 210 максимальной скорости сравнивает измеренное замедление 214 с целевым замедлением.
[0075] В ответ на определение посредством регулятора 210 максимальной скорости того, что измеренное замедление 214 меньше целевого замедления, способ по фиг. 6 переходит к этапу 604, на котором регулятор 210 максимальной скорости определяет разность между измеренным замедлением 214 и целевым замедлением и затем сравнивает разность с первым пороговым значением (например, предварительно определенным пороговым значением). В ответ на определение того, что разность превышает первое пороговое значение, способ по фиг. 5 переходит к этапу 606, на котором регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса. Например, регулятор 210 максимальной скорости увеличивает максимальную скорость работы насоса на первое предварительно определенное значение на основе разности между первым пороговым значением и разностью между измеренным замедлением 214 и целевым замедлением. При увеличении максимальной скорости работы насоса посредством регулятора 210 максимальной скорости на этапе 606, или в ответ на определение посредством регулятора 210 максимальной скорости того, что разность меньше или равна первому пороговому значению, способ по фиг. 5 завершается.
[0076] В противном случае, в ответ на определение посредством регулятора 210 максимальной скорости того, что измеренное замедление 214 превышает или равно целевому замедлению, на этапе 602, способ по фиг. 6 переходит к этапу 608, на котором регулятор 210 максимальной скорости определяет разность между измеренным замедлением 214 и целевым замедлением и затем сравнивает разность со вторым пороговым значением (например, предварительно определенным пороговым значением). В ответ на определение того, что разность превышает второе пороговое значение, способ по фиг. 6 переходит к этапу 610, на котором регулятор 210 максимальной скорости снижает максимальную скорость работы насоса. Например, регулятор 210 максимальной скорости снижает максимальную скорость работы насоса на второе предварительно определенное значение на основе разности между вторым пороговым значением и разностью между измеренным замедлением 214 и целевым замедлением. При снижении максимальной скорости работы насоса посредством регулятора 210 максимальной скорости на этапе 610, или в ответ на определение посредством регулятора 210 максимальной скорости того, что разность меньше или равна второму пороговому значению, способ по фиг. 6 завершается.
[0077] В этой заявке, использование дизъюнкции имеет намерение включать в себя конъюнкцию. Использование определенных или неопределенных артиклей не имеет намерение указывать число элементов. В частности, ссылка на "the" объект либо "a" и "an" объект имеет намерение обозначать также один из возможного множества таких объектов. Дополнительно, конъюнкция "или" может использоваться для того, чтобы передавать признаки, которые присутствуют одновременно, вместо взаимоисключающих альтернатив. Другими словами, следует понимать, что конъюнкция "или" включает в себя "и/или". Термины "включает в себя", "включающий в себя" и "включать в себя" являются охватывающими и имеют идентичный объем с "содержит", "содержащий" и "содержать", соответственно.
[0078] Вышеописанные варианты осуществления и, в частности, все "предпочтительные" варианты осуществления являются возможными примерами реализаций и изложены просто для ясного понимания принципов изобретения. Множество изменений и модификаций могут вноситься в вышеописанные варианты осуществления без существенного отступления от сущности и принципов технологий, описанных в данном документе. Все модификации имеют намерение быть включенными в данный документ в пределы объема этого раскрытия сущности и защищенными посредством прилагаемой формулы изобретения.


Предложено транспортное средство. Транспортное средство содержит тормозной насос (118), имеющий максимальную скорость работы насоса, деселератор транспортного средства. Деселератор выполнен с возможностью определять целевое замедление для автономного замедления и отправлять сигнал в тормозной насос (118) для того, чтобы замедлять транспортное средство при целевом замедлении. Транспортное средство также содержит первый датчик для того, чтобы определять измеренное замедление и регулятор максимальной скорости (210) для того, чтобы регулировать максимальную скорость работы насоса (118) на основе разности между целевым замедлением и измеренным замедлением. Предложены также способ для автономного замедления транспортного средства и материальный машиночитаемый носитель хранения данных. Достигается регулирование максимальной скорости работы тормозного насоса на основе целевого и измеренного замедлений. 3 н. и 17 з.п. ф-лы, 7 ил.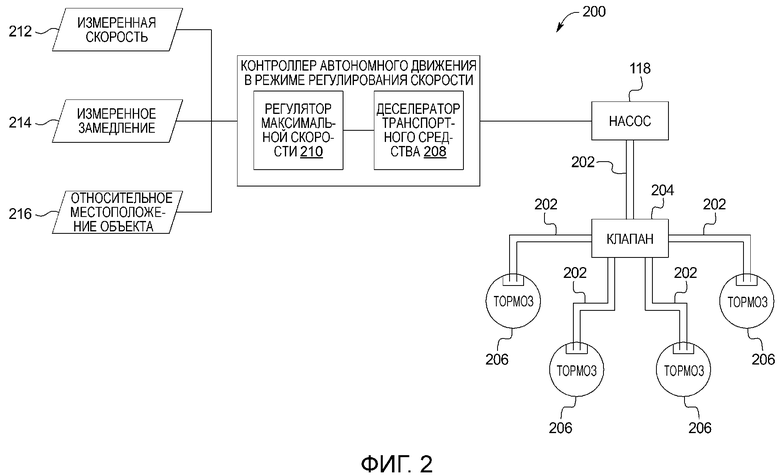
1. Транспортное средство, содержащее:
- тормозной насос, имеющий максимальную скорость работы насоса;
- деселератор транспортного средства, выполненный с возможностью:
- определять целевое замедление для автономного замедления; и
- отправлять сигнал в тормозной насос для того, чтобы замедлять транспортное средство при целевом замедлении;
- первый датчик для того, чтобы определять измеренное замедление; и
- регулятор максимальной скорости для того, чтобы регулировать максимальную скорость работы насоса на основе разности между целевым замедлением и измеренным замедлением.
2. Транспортное средство по п. 1, в котором регулятор максимальной скорости увеличивает максимальную скорость работы насоса в ответ на определение того, что измеренное замедление меньше целевого замедления.
3. Транспортное средство по п. 2, в котором регулятор максимальной скорости снижает максимальную скорость работы насоса в ответ на определение того, что измеренное замедление превышает целевое замедление.
4. Транспортное средство по п. 3, в котором регулятор максимальной скорости поддерживает максимальную скорость работы насоса в ответ на определение того, что измеренное замедление равно целевому замедлению.
5. Транспортное средство по п. 1, в котором первый датчик представляет собой акселерометр для того, чтобы определять измеренное замедление транспортного средства.
6. Транспортное средство по п. 1, в котором в тормозном насосе происходит всплеск до максимальной скорости работы насоса при приеме сигнала из деселератора транспортного средства для того, чтобы замедлять транспортное средство при целевом замедлении.
7. Транспортное средство по п. 1, дополнительно включающее в себя второй датчик, чтобы обнаруживать объект впереди транспортного средства, при этом тормозной насос замедляет транспортное средство, чтобы поддерживать буферное расстояние между транспортным средством и объектом, деселератор транспортного средства определяет буферное расстояние на основе скорости транспортного средства.
8. Транспортное средство по п. 7, в котором деселератор транспортного средства определяет целевое замедление на основе расстояния между объектом и транспортным средством, скорости транспортного средства, скорости объекта и измеренного замедления транспортного средства.
9. Транспортное средство по п. 8, в котором деселератор транспортного средства определяет расстояние и относительную скорость между объектом и транспортным средством посредством второго датчика.
10. Транспортное средство по п. 8, в котором первый датчик представляет собой датчик скорости транспортного средства, который определяет скорость транспортного средства, которая используется для того, чтобы определять измеренное замедление.
11. Способ для автономного замедления транспортного средства, при этом способ содержит этапы, на которых:
- определяют посредством процессора целевое замедление для транспортного средства;
- отправляют сигнал в тормозной насос для того, чтобы замедлять транспортное средство при целевом замедлении, причем тормозной насос имеет максимальную скорость работы насоса;
- определяют измеренное замедление посредством первого датчика; и
- регулируют максимальную скорость работы насоса на основе разности между целевым замедлением и измеренным замедлением.
12. Способ по п. 11, дополнительно содержащий этапы, на которых:
- обнаруживают посредством второго датчика объект впереди транспортного средства; и
- определяют целевое замедление, чтобы поддерживать буферное расстояние между транспортным средством и объектом.
13. Способ по п. 11, в котором регулирование максимальной скорости работы тормозного насоса включает в себя этап, на котором увеличивают максимальную скорость работы насоса в ответ на определение того, что измеренное замедление меньше целевого замедления.
14. Способ по п. 13, в котором максимальная скорость работы насоса увеличивается на основе разности между измеренным замедлением и целевым замедлением.
15. Способ по п. 13, в котором регулирование максимальной скорости работы тормозного насоса включает в себя этап, на котором снижают максимальную скорость работы насоса в ответ на определение того, что измеренное замедление превышает целевое замедление.
16. Способ по п. 15, в котором максимальная скорость работы насоса снижается на основе разности между измеренным замедлением и целевым замедлением.
17. Способ по п. 11, в котором максимальная скорость работы насоса увеличивается в ответ на определение того, что измеренное замедление меньше целевого замедления, по меньшей мере, на первое пороговое значение.
18. Способ по п. 17, в котором максимальная скорость работы насоса снижается в ответ на определение того, что измеренное замедление превышает целевое замедление, по меньшей мере, на второе пороговое значение.
19. Способ по п. 18, в котором максимальная скорость работы насоса поддерживается в ответ на определение того, что измеренное замедление меньше целевого замедления на значение, меньшее первого порогового значения, или того, что измеренное замедление превышает целевое замедление на значение, меньшее второго порогового значения.
20. Материальный машиночитаемый носитель хранения данных, включающий в себя инструкции, которые при выполнении инструктируют транспортному средству:
- определять посредством процессора целевое замедление для транспортного средства;
- отправлять сигнал в тормозной насос для того, чтобы замедлять транспортное средство при целевом замедлении, причем тормозной насос имеет максимальную скорость работы насоса;
- определять измеренное замедление посредством первого датчика; и
- регулировать максимальную скорость работы насоса на основе разности между целевым замедлением и измеренным замедлением.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

