Настоящее изобретение относится в целом к автоматическому подъему элементов шасси транспортного средства. Более конкретно изобретение относится к системе согласно преамбуле пункта 1 и к моторному транспортному средству согласно пункту 7. Изобретение относится также к способу регулирования подъема элемента шасси моторного транспортного средства согласно преамбуле пункта 10.
При загрузке груза и выгрузке груза с тяжелых транспортных средств, таких как грузовые автомобили, трактора и тягачи с тележками, обычно практикой является управление структуры перевозки груза на транспортном средстве, так чтобы груз должным образом поднимался или опускался. Например, возможно регулирование высоты грузовой платформы транспортного средства таким образом, чтобы она оказалась на одном уровне с погрузочным краном.
Кроме того, если контейнер или равнозначный грузовой блок, помещенный на опорные стойки, должен быть загружен на грузовик, прицеп или скиповый погрузчик, обычно бывает эффективно, если транспортное средство может реверсироваться под контейнером с последующим подъемом так, чтобы с опорных стоек контейнера была разгрузка с последующим их высвобождением.
В заявке WO 03/000512 раскрыта система, которая позволяет, чтобы подъем шасси транспортного средства регулировался между уровнем загрузки и уровнем возбуждения. В данном случае груз, который должен перевозиться на колесных осях на уровне возбуждения, рассчитывается во время загрузки транспортного средства (т.е. во время расположения на уровне загрузки). Таким образом, соответствующая загрузка облегчается.
В патенте США № 6470248 описана система управления подвеской транспортного средства, которая дает возможность автоматического регулирования по меньшей мере одного элемента регулирования высоты, находящегося под давлением текучей среды, так что определенный подъем шасси транспортного средства может поддерживаться независимо от груза, который перевозится транспортным средством.
Однако пока не существует решения, которое может гарантировать оптимальное управление подъемом груза, работающим на сжатой текучей среде перевозящегося элементом шасси транспортного средства (т.е. грузовика, прицепа или скипового погрузчика) в связи с загрузкой отдельного контейнера или равнозначного грузового блока на транспортное средство, так, чтобы после подъема элемента шасси можно было бы безопасно высвободить опорные стойки контейнера. Вместо этого в настоящее время осуществляется излишний подъем элемента шасси для того, чтобы гарантировать действительное снятие нагрузки с опорных стоек. Конечно, эта процедура требует затрат времени, что ведет также к расходу текучей среды под давлением (например, в виде сжатого воздуха).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является поэтому обеспечение решения, которое облегчает проблему выше и таким образом предлагает эффективное управление подъема, который экономит запасы находящейся под давлением текучей среды транспортного средства.
Согласно одному аспекту изобретения эта цель достигается с помощью первоначально описанной системы, в которой во время подъема элемента шасси блок управления выполнен с возможностью исследования, выполняется или нет первый критерий в отношении контролируемого параметра, выражающего степень повышения уровня давления текучей среды на единицу подъема. Если первый критерий выполняется, блок управления затем выполнен с возможностью исследования, выполняется или нет второй критерий в отношении контролируемого параметра. В ответ на выполнение второго критерия блок управления выполнен с возможностью создания управляющего сигнала такого, что подъем элемента шасси прекращается.
Важным преимуществом, присущим этой системе, является то, что элемент шасси может быть поднят до уровня, достаточного для допускания плавного высвобождения опорных стоек, при этом без рискованного и ненужного подъема элемента шасси.
Согласно одному варианту реализации этого аспекта изобретения первый критерий выполняется в том случае, если наклон уровня давления текучей среды, выраженный как функция подъема, является положительным. Поэтому давление текучей среды повышается по мере подъема элемента шасси. Обычно это равнозначно тому, что грузовой блок поднимается.
Предпочтительно первый критерий считается выполненным только в том случае, если наклон уровня давления текучей среды, выраженный как функция подъема, располагается в первом интервале угла наклона на протяжении первого порогового подъема. Таким образом, можно избежать любых аномальностей в отношении давления к подъему, происходящих до фактического подъема грузового блока, чтобы ложно не регистрировать, что груз поднимается.
Согласно другому варианту реализации этого аспекта изобретения второй критерий выполняется при невыполнении первого критерия. Таким образом, разгрузка с опорных стоек может быть обнаружена простым и непосредственным образом.
Предпочтительным, однако, является выполнение второго критерия, если наклон уровня давления текучей среды, выраженный как функция подъема, находится в пределах второго интервала угла наклона, который находится в диапазоне от предельного отрицательного наклона до положительного наклона, требующегося для выполнения первого критерия. Более предпочтительно второй критерий рассматривается как выполненный, если наклон уровня давления текучей среды, выраженный как функция подъема, располагается во втором интервале угла наклона на протяжении второго порогового подъема. В результате достигается ясное и надежное обнаружение разгрузки с опорных стоек.
Согласно другому аспекту изобретения цель достигается с помощью моторного транспортного средства, которое включает в себя предложенную выше систему.
Согласно одному варианту реализации этого аспекта изобретения транспортное средство включает в себя рамную ходовую часть, подъем которой над землей является регулируемым вместе с подъемом элемента шасси. Кроме того, рамная ходовая часть выполнена с возможностью перевозки сменного контейнера (открытого или закрытого), который представляет собой грузовой блок. Поэтому облегчается загрузка так называемых сменных контейнеров.
Согласно одному варианту реализации этого аспекта изобретения транспортное средство включает в себя сцепное устройство типа «пятое колесо», подъем которого над землей является регулируемым вместе с подъемом элемента шасси. В данном случае сцепное устройство выполнено с возможностью сцепки с прицепом, представляющим собой грузовой блок. Таким образом, процедура сцепки прицепа с транспортным средством может быть сделана высокоэффективной.
Согласно другому аспекту изобретения цель достигается с помощью описанного первоначально способа, при котором во время подъема элемента шасси исследуется, выполняется или нет первый критерий в отношении контролируемого параметра, выражающего степень повышения уровня давления текучей среды на единицу подъема. Если первый критерий выполняется, затем исследуется, выполняется или нет второй критерий в отношении контролируемого параметра. После этого в ответ на выполнение второго критерия подъем элемента шасси прекращается. Преимущества этого способа, так же как его предпочтительных вариантов реализации, очевидны из вышеупомянутого обсуждения со ссылкой на предлагаемую структуру транспортного средства.
Согласно дальнейшему аспекту изобретения цель достигается с помощью компьютерного программного продукта, непосредственно загружаемого во внутреннюю память компьютера, содержащего программное обеспечение для управления предложенного выше способа, когда упомянутая программа функционирует в компьютере.
Согласно другому аспекту изобретения цель достигается с помощью машиночитаемого носителя с записанной на нем программой, где программа должна побуждать компьютер управлять предложенным выше способом.
Дальнейшие преимущества, выгодные признаки и области применения настоящего изобретения будут очевидны из следующего описания и зависимых пунктов формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет теперь объяснено более подробно посредством вариантов реализации, которые раскрыты как примеры, и со ссылкой на прилагаемые чертежи.
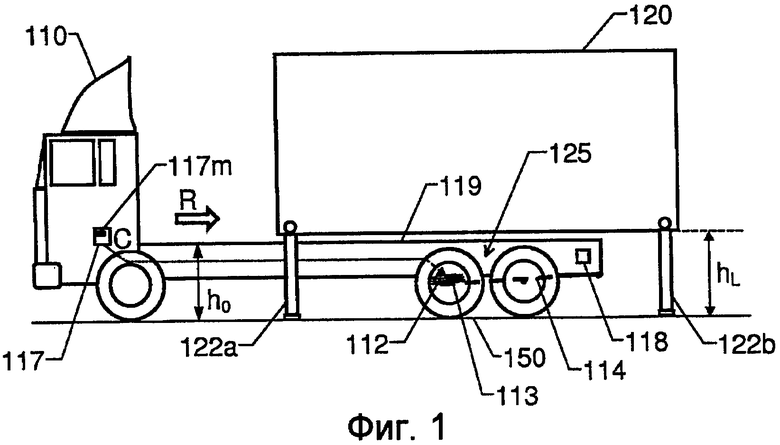
Фиг.1 схематически представляет моторное транспортное средство и отдельный грузовой блок в начальной фазе процедуры подъема согласно первому варианту реализации изобретения;
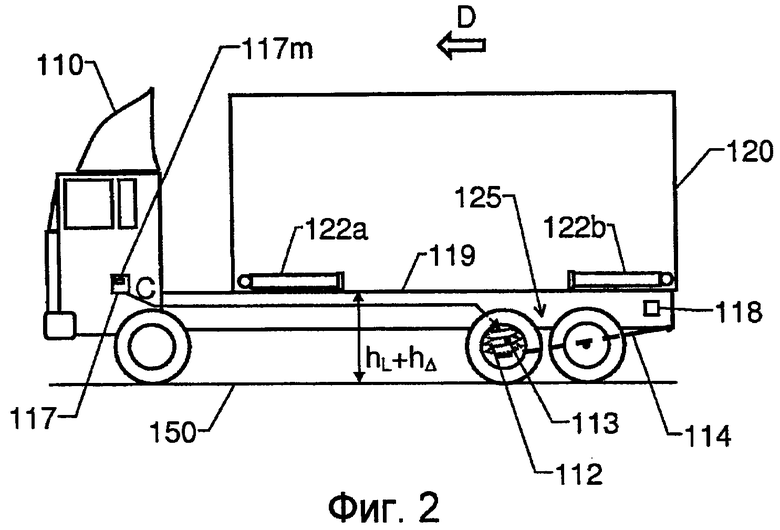
Фиг.2 показывает транспортное средство и контейнер грузовика с Фиг.1 после того, как контейнер загружен на транспортное средство;
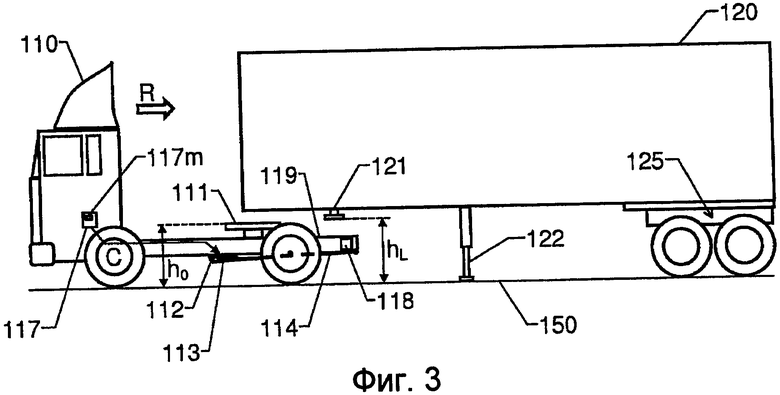
Фиг.3 схематически изображает тягач и прицеп во время начальной фазы процедуры подъема согласно второму варианту реализации изобретения;
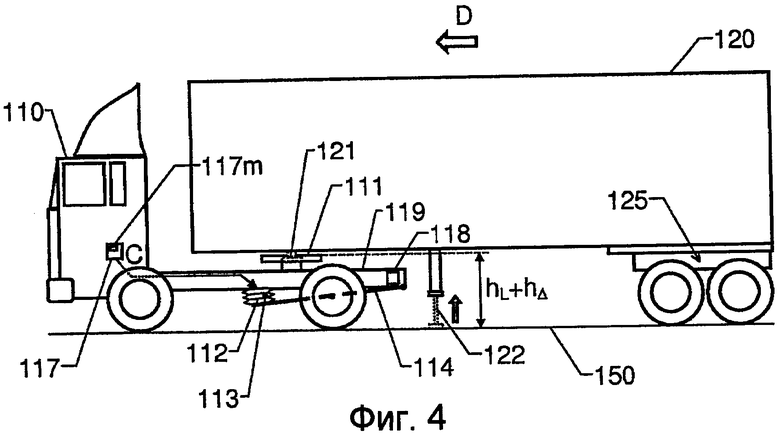
Фиг.4 показывает тягач и прицеп с Фиг.3 после того, как прицеп сцеплен с транспортным средством;
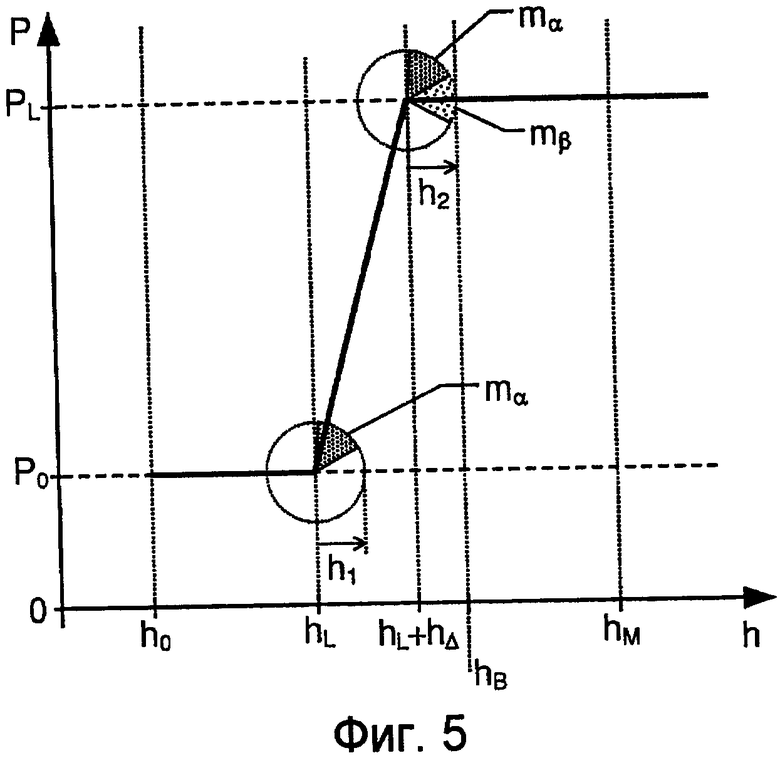
Фиг.5 показывает схему, которая иллюстрирует соотношение между подъемом элемента шасси транспортного средства и уровнем давления в механизме управления уровнем, работающем на текучей среде, влияющем на подъем элемента шасси в связи с загрузкой грузового блока на транспортное средство; и
Фиг.6 показывает блок-схему, иллюстрирующую весь способ согласно изобретению.
ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Фиг.1 показывает транспортное средство 110, например грузовик, и отдельный грузовой блок 120, такой как сменный контейнер, помещенный на пару опорных стоек 122а и 122b, выдвинутых по направлению к поверхности 150, обычно к земле. В данном случае предполагается, что элемент 119 шасси первоначально имеет подъем h0 над поверхностью 150, на которой транспортное средство 110 располагается. Подъем h0 достаточно мал, чтобы допускать реверсирование R элемента 119 шасси под грузовым блоком 120. Фиг.2 показывает транспортное средство 110 и грузовой блок 120, когда элемент 119 шасси поднят, а грузовой блок 120 загружен на транспортное средство 110. Предпочтительно, если грузовой блок 120 является сменным контейнером, транспортное средство 110 включает в себя рамную ходовую часть, выполненную с возможностью перевозки сменного контейнера, и подъем рамной ходовой части над поверхностью 150 является регулируемым вместе с подъемом элемента 119 шасси.
Как показано на Фиг.1, транспортное средство 110 оборудовано системой управления для регулирования подъема элемента 119 шасси относительно поверхности 150. В частности, система управления включает в себя блок 117 управления, механизм 112; 114 управления уровнем, работающий на текучей среде, средство 118 датчик высоты и средство 113 датчика давления. Механизм управления уровнем, работающий на текучей среде, выполненный с возможностью приема управляющего сигнала С, и должен в ответ на него воздействовать на подъем элемента 119 шасси. Механизм управления уровнем, работающий на текучей среде, в свою очередь, может содержать расширяемую камеру 112 для текучей среды и устройство 114 плеча рычага, при этом камера 112 механически связана с устройством 114 плеча рычага, а последнее далее шарнирно соединяется с элементом 119 шасси и с по меньшей мере одной колесной формулой 125. Таким образом, путем манипулирования давления в камере 112 для текучей среды механизм 112; 114 управления уровнем может воздействовать на подъем элемента 119 шасси над поверхностью 150. Согласно изобретению камера 112 для текучей среды действует в ответ на управляющий сигнал С. Текучая среда в камере 112 может быть или газом (например, сжатым воздухом), или жидкостью в зависимости от того, формирует ли камера 112 часть пневматической или гидравлической системы управления.
Средство 118 датчика высоты выполнено с возможностью регистрации параметра высоты, обозначающего подъем элемента 119 шасси над поверхностью 150. Средство 118 датчика высоты может применять любую известную технику, чтобы определять подъем, такую как передача ультразвуковых волн, и/или различных форм электромагнитных сигналов из теплового, радиочастотного и/или видимого диапазона спектра. Для того чтобы оценить параметр высоты, средство 118 и элемент 119 шасси должны иметь фиксированное и четко определенное позиционное взаиморасположение. Однако точное положение средства 118 по существу несущественно. Конечно, предпочтительно, если средство 118 располагается, где он относительно защищен от физических повреждений и загрязнения. Средство 113 датчика давления выполнено с возможностью регистрации параметра давления, обозначающего уровень давления текучей среды в камере 112 для текучей среды механизма управления уровнем, и для передачи зарегистрированного давления текучей среды на блок 117 управления.
Посредством механизма 112; 114 управления уровнем, работающего на текучей среде, элемент 119 шасси может подняться как выше, так и ниже первоначального уровня h0. Элемент 119 шасси, в свою очередь, выполнен с возможностью перевозки грузового блока 120. Поэтому путем расположения элемента 119 под грузовым блоком 120, подъема элемента 119 и последующего высвобождения опорных стоек 122а и 122b грузовой блок 120 можно погрузить на транспортное средство 110. И наоборот, путем сцепления опорных стоек 122а и 122b и опускания элемента 119 грузовой блок 120 может быть выгружен с транспортного средства 110. Фиг.1 показывает грузовой блок 120 в форме грузового контейнера. Изобретение, естественно, применимо к любому типу загружаемого или выгружаемого грузового блока, который выполнен с возможностью допущения автономного размещения этого блока. Таким образом, предлагаемое решение может быть, например, использовано для сцепки прицепа, имеющего «пятое колесо», сцепленное с тягачом. Это будет проиллюстрировано ниже со ссылкой на Фиг.3 и 4.
В любом случае согласно изобретению во время подъема элемента 119 шасси блок 117 управления выполнен с возможностью исследования, выполняется или нет первый критерий в отношении контролируемого параметра, выражающего степень повышения уровня давления текучей среды на единицу подъема. Фиг.5 показывает схему, которая иллюстрирует типичное соотношение между подъемом h элемента 119 шасси и уровнем Р давления в механизме управления уровнем, работающем на текучей среде, влияющим на подъем элемента 119 шасси.
Согласно одному варианту реализации изобретения первый критерий выполняется в случае, если наклон уровня Р давления текучей среды, выраженный как функция подъема h, является положительным. На Фиг.5 эта ситуация возникает тогда, когда подъем h достигает hL - уровня, при котором элемент 119 шасси впервые соприкасается с грузовым блоком 120 (см. также Фиг.1 и 3). До достижения этого подъема (т.е. от первоначального уровня h0 до h<hL) механизм управления уровнем, работающий на текучей среде, поднимает только сам элемент 119 шасси. Поэтому уровень Р давления в камере 112 для текучей среды остается по существу постоянным Р0. Однако при подъеме h=hL механизм управления уровнем, работающий на текучей среде, должен также поднимать грузовой блок 120 или, точнее, должен принимать на себя большую и бóльшую долю суммарного веса грузового блока 120. В результате положительный наклон графика Р/h на Фиг.5 (который представляет уровень Р давления текучей среды как функцию подъема h) указывает, что элемент 119 шасси поддерживает грузовой блок 120.
Этот индикатор используется согласно изобретению. Однако для того, чтобы избежать ошибочного толкования индикатора (например, вследствие небольшого увеличения давления Р в интервале от h0 до hL), может оказаться удобным рассматривать первый критерий как выполненный, если наклон уровня Р давления текучей среды, выраженного как функция подъема h, лежит в первом интервале mα угла наклона на протяжении первого порогового подъема h1. На Фиг.5 это проиллюстрировано посредством первого сектора круга, имеющего радиус h1 по оси h подъема, где первый сектор содержит положительные углы наклона, например от 10° до 85°. Конечно, подходящий диапазон углов полностью зависит от масштаба осей Р и h соответственно. Тем не менее, избегая 0° и/или 90° путем присвоения ненулевого значения первому пороговому подъему h1 доля ложных показателей того факта, что элемент 119 шасси поддерживает грузовой блок 120, может оставаться относительно низко.
Далее, при подъеме h=hL+hΔ элемент 119 шасси поднимает грузовой блок 120 до уровня, при котором с опорных стоек 122а и 122b не переносится больше никакой нагрузки на элемент 119 шасси. В примере, показанном на Фиг.1 и 2, это равнозначно тому, что элемент 119 шасси перевозит весь вес грузового блока 120 (т.е. на практике hL+hΔ равен высоте опорных стоек 122а и 122b). Однако, как рассматривается ниже со ссылкой на Фиг.3 и 4, hL+hΔ необязательно должен быть подъемом, при котором элемент 119 шасси перевозит весь вес грузового блока 120.
Согласно изобретению, после того как первый критерий выполнился, блок 117 управления выполнен с возможностью исследования, выполняется или нет второй критерий в отношении контролируемого параметра, т.е. уровня Р давления текучей среды, выраженного как функция подъема h. В ответ на выполнение второго критерия блок 117 управления далее выполнен с возможностью создания управляющего сигнала С такого, что подъем h элемента 119 шасси прекращается. Теперь опорные стойки 122а и 122b могут быть высвобождены и транспортное средство 110 может быть приведено в движение в направлении D. Предпочтительно перед приведением в движение в направлении D элемент 119 шасси устанавливается на уровень возбуждения, который обычно ниже hL+hΔ. Конечно, с технической точки зрения может быть применим любой другой уровень.
Согласно одному варианту реализации изобретения второй критерий рассматривается как выполненный, когда первый критерий больше не выполняется. Отсюда, в зависимости от определения первого критерия, это может быть равнозначно тому, что наклон графика Р/h имеет не положительное значение. А именно, выравнивание графика Р/h (определяемого вторым критерием) равнозначно факту, что элемент 119 шасси поднимает грузовой блок 120 до уровня, при котором на элемент 119 шасси больше не передается никакой нагрузки с опорных стоек 122а и 122b. Это является другим индикатором, который используется согласно изобретению.
Согласно другому варианту реализации изобретения второй критерий рассматривается как выполненный в случае, если наклон уровня Р давления текучей среды, выраженный как функция подъема h, располагается во втором интервале mβ угла наклона, который находится в диапазоне от предельного отрицательного наклона до положительного наклона, равного наклону, требующемуся для выполнения первого критерия. Более предпочтительно, второй критерий считается выполненным, если наклон уровня Р давления текучей среды Р, выраженный как функция подъема h, располагается во втором интервале mβ угла наклона на протяжении второго порогового подъема h2. Это может быть удобным, поскольку позволяет допускать короткие плоские участки или понижения графика Р/h без инициирования второго критерия.
Предпочтительно блок 117 управления включает в себя или бывает связан с машиночитаемым носителем (117m), имеющим записанную на нем программу; где программа выполнена с возможностью побуждения блока 117 управлять описанной выше процедурой. Более того, хотя блок 117 управления в данном случае размещается в кабине транспортного средства 110, согласно изобретению блок 117 управления может быть равным образом помещен в любом месте транспортного средства 110, таком как его шасси или рама. Кроме того, предлагаемая процедура начинается в ответ на команду оператора, введенную в блок 117 управления. Упомянутая команда может быть вызвана посредством вводящего элемента, например, в форме переключателя, кнопки или рычага, помещенных в кабине водителя транспортного средства 110 (например, на приборном щитке), или в альтернативном блоке, таком как модуль дистанционного управления, работающий как изнутри, так и снаружи транспортного средства 110.
Обратимся теперь к Фиг.3, на которой схематически изображены тягач и прицеп согласно другому варианту реализации изобретения. В этом случае тягач включает в себя регулируемый элемент 119 шасси, а прицеп представляет собой загружаемый/выгружаемый грузовой блок 120. В данном случае в дополнение к по меньшей мере одной опорной стойке 122 грузовой блок 120 поддерживается колесной формулой 125. Поэтому путем выдвижения по меньшей мере одной опорной стойки 122 по направлению к поддерживающей поверхности 150 прицеп может быть помещен в автономное положение, при котором он перевозится по меньшей мере одной опорной стойкой 122 плюс колесной формулой 125.
Все числовые позиции на Фиг.3 и 4, которые встречаются также на Фиг.1 и 2, обозначают те же элементы, что и описанные выше со ссылкой на Фиг.1 и 2. Следовательно, тягач 110 включает в себя механизм 112; 114 управления уровнем, работающий на текучей среде, средство 118 датчика высоты, средство 113 датчика давления и блок 117 управления. Кроме того, механизм 112; 114 управления уровнем, работающий на текучей среде, выполнен с возможностью влияния на подъем элемента 119 шасси в ответ на управляющий сигнал С, а средство 118 датчика высоты выполнено с возможностью регистрации параметра высоты, обозначающего подъем элемента 119 шасси. Средство 113 датчика давления выполнено с возможностью регистрации параметра давления, обозначающего уровень давления текучей среды в камере 112 для текучей среды механизма управления уровнем, и блок 117 управления выполнен с возможностью приема параметров высоты и давления и в ответ на них создания управляющего сигнала С. В данном случае, однако, тягач 110 имеет также первое сцепное устройство 111, например, типа «пятое колесо», механически связанное с элементом 119 шасси, так что подъем первого сцепного устройства 111 относительно поверхности 150 является регулируемым вместе с регулированием элемента 119 шасси. Кроме того, в этом варианте реализации изобретения тягач 120 оборудован вторым сцепным устройством 121, например, типа пальца прицепного механизма полуприцепа, который выполнен с возможностью сцепки с первым сцепным устройством 111 тягача 110.
Во-первых, предполагается, что прицеп 120 паркуется в автономном положении, таком что второе сцепное устройство 121 имеет первоначальный подъем hL над поверхностью 150, на которой размещаются прицеп 120 и транспортное средство 110. В это время элемент 119 шасси тягача 110 устанавливают таким образом, что первое сцепное устройство 111 поднимается до уровня h0 над поверхностью 150, где h0<hL. Поэтому тягач 110 располагается достаточно низко, чтобы допустить, чтобы элемент 119 шасси реверсировал в направлении R под передней частью прицепа 120 туда, где располагается второе сцепное устройство 121.
Когда тягач 110 устанавливается с первым сцепным устройством 111 под передней секцией второго сцепного устройства 121, элемент 119 шасси поднимается до тех пор, пока первое сцепное устройство 111 не начинает поддерживать тягач 120, т.е. до h=hL (см. также Фиг.5). Затем тягач 110 реверсирует в направлении R, так что сцепные устройства 111 и 121 могут соответственно взаимно соединиться. Перед этим завершающим передвижением назад может оказаться удобным немного опустить первое сцепное устройство 111, чтобы допустить его свободное (или по меньшей мере с пониженным трением) боковое перемещение под вторым сцепным устройством 121. В любом случае после соединения первого сцепного устройства 111 со вторым сцепным устройством 121 элемент 119 шасси поднимается до h=hL+hΔ, как описано выше со ссылкой на Фиг.1, 2 и 5. Затем можно высвободить по меньшей мере одну опорную стойку 122, и транспортное средство 110 может быть приведено в движение по направлению D, таким образом буксируя прицеп 120. Однако обычно перед этим элемент 119 шасси устанавливается на уровне возбуждения, как описано выше.
Для того чтобы обобщить, весь способ согласно изобретению будет описан ниже со ссылкой на блок-схему на Фиг.6. При этом предполагается, что грузовой блок, загруженный на транспортное средство, помещается в отдельное положение, при котором грузовой блок по меньшей мере частично поддерживается одной или несколькими опорными стойками. Предполагается также, что транспортное средство должным образом помещается под грузовой блок.
Первый шаг 610 инициирует подъем элемента шасси по направлению к грузовому блоку. Затем шаг 620 исследует, выполняется или нет первый критерий в отношении контролируемого параметра. Контролируемый параметр выражает степень повышения уровня давления текучей среды на единицу подъема. Давление текучей среды, в свою очередь, регистрируется механизмом управления уровнем, действующим на текучей среде, для регулирования подъема элемента шасси.
При выполнении первого критерия следует шаг 630. В противном случае процедура возвращается назад к шагу 620. В ходе шага 630 исследуют, выполняется или нет второй критерий в отношении контролируемого параметра. Если второй критерий выполняется, следует шаг 640. В противном случае процедура возвращается назад и остается в шаге 630.
Шаг 640 прекращает подъем элемента шасси. После этого процедура заканчивается и опорные стойки грузового блока могут быть высвобождены.
Все шаги процесса, так же как и любой вспомогательной последовательности шагов, описанных выше со ссылкой на Фиг.6, могут управляться посредством запрограммированного компьютерного устройства. Кроме того, хотя варианты реализации изобретения, описанные выше со ссылкой на чертежи, содержат компьютерное устройство и процессы, выполняемые в компьютерном устройстве, изобретение таким образом распространяется также на компьютерные программы, в особенности на компьютерные программы, записанные на или в носителе, выполненные с возможностью введения изобретения в практику. Программа может иметь форму исходного кода; объектного кода, промежуточного источника кода и объектного кода, такого как в частично компилированной форме или в любой другой форме, подходящей для использования при осуществлении процесса согласно изобретению. Носитель может быть любым объектом или аппаратом, способным перевозить программу. Например, носитель может содержать носитель данных, такой как флэш-память, ROM (постоянное запоминающее устройство), например CD (компакт-диск) или полупроводниковое ROM, EPROM (стираемое программируемое постоянное запоминающее устройство), EEPROM (электрически стираемое программируемое постоянное запоминающее устройство), или магнитный носитель записи, например гибкий диск или жесткий диск. Далее, носитель может быть передающимся носителем, таким как электрический или оптический сигнал, который может передаваться через электрический или оптический кабель, или по радио, или иным средством. Когда программа воплощена в сигнал, который может быть передан непосредственно кабелем или другим устройством или средством, носитель может быть образован таким кабелем, или устройством, или средством. Альтернативно, носитель может быть интегральной схемой, в которую встроена программа, причем интегральная схема выполнена с возможностью выполнения или для использования при выполнении соответствующих процессов.
Изобретение не ограничивается описанными вариантами реализации на фигурах, но может свободно варьироваться в рамках формулы изобретения.

Настоящее изобретение относится к автоматическому управлению подъемом элемента шасси моторного транспортного средства над поверхностью, на которой транспортное средство размещается. Система для регулирования подъема элемента шасси моторного транспортного средства содержит механизм управления уровнем, средство датчика высоты, средство датчика давления, блок управления. Блок управления позволяет определить выполнение первого критерия в отношении степени повышения уровня давления текучей среды на единицу подъема. Если первый критерий выполняется, блок управления позволяет определить выполнение второго критерия в отношении контролируемого параметра. При выполнении второго критерия создается управляющий сигнал для прекращения подъема элемента шасси. Моторное транспортное средство содержит вышеуказанную систему управления. Способ регулирования подъема элемента шасси моторного транспортного средства заключается в регистрации параметра высоты и регистрации уровня давления текучей среды в камере для текучей среды механизма управления уровнем. В процессе подъема элемента шасси определяют выполнение двух критериев в отношении контролируемых параметров. Осуществляют прекращение подъема элемента шасси в ответ на выполнение второго критерия. Технический результат заключается в повышении безопасности. 3 н. и 12 з.п. ф-лы, 6 ил.
1. Система для регулирования подъема (h) элемента (119) шасси моторного транспортного средства (110) над поверхностью (150), на которой размещается транспортное средство (110), причем элемент (119) шасси выполнен с возможностью перевозки загружаемого и выгружаемого грузового блока (120), а грузовой блок (120) имеет по меньшей мере одну опорную стойку (122; 122а, 122b), выполненную с возможностью, когда во включенном положении выдвинута по направлению к поверхности (150), допущения автономного размещения грузового блока (120), причем система содержит механизм (112, 114) управления уровнем, работающий на текучей среде, выполненный с возможностью воздействия на подъем (h) в ответ на управляющий сигнал (С), средство (118) датчика высоты, выполненное с возможностью регистрации параметра высоты, обозначающего подъем (h), средство (113) датчика давления, выполненное с возможностью регистрации параметра давления, обозначающего уровень (Р) давления текучей среды в камере (112) для текучей среды механизма управления уровнем, и блок (117) управления, выполненный с возможностью приема параметров высоты и давления и в ответ на них создавать управляющий сигнал (С), отличающаяся тем, что блок (117) управления выполнен с возможностью во время подъема элемента (119) шасси: исследовать выполняется или нет первый критерий в отношении контролируемого параметра, выражающего степень повышения уровня (Р) давления текучей среды на единицу подъема (h), и если первый критерий выполняется, исследовать, выполняется или нет второй критерий в отношении контролируемого параметра, и в ответ на выполнение второго критерия создавать управляющий сигнал (С) такой, что подъем элемента шасси (119) прекращается.
2. Система по п.1, отличающаяся тем, что первый критерий выполняется, если наклон графика уровня (Р) давления текучей среды, выраженный как функция подъема (h), является положительным.
3. Система по п.2, отличающаяся тем, что первый критерий выполняется, если наклон графика уровня (Р) давления текучей среды, выраженный как функция подъема (h), располагается в первом интервале (mα) угла наклона на протяжении первого порогового подъема (h1).
4. Система по любому из предшествующих пунктов, отличающаяся тем, что второй критерий выполняется при невыполнении первого критерия.
5. Система по п.4, отличающаяся тем, что второй критерий выполняется, если наклон графика уровня (Р) давления текучей среды, выраженный как функция подъема (h), располагается во втором интервале (mβ) угла наклона, находящегося в диапазоне от предельного отрицательного наклона до положительного наклона, требующегося для выполнения первого критерия.
6. Система по п.5, отличающаяся тем, что второй критерий выполняется, если наклон графика уровня (Р) давления текучей среды, выраженный как функция подъема (h), располагается во втором интервале (mβ) угла наклона, на протяжении второго порогового подъема (h2).
7. Моторное транспортное средство (110), содержащее систему управления по любому из пп.1-6.
8. Моторное транспортное средство (110) по п.7, отличающееся тем, что транспортное средство (110) содержит рамную ходовую часть, подъем которой над поверхностью (150) является регулируемым вместе с подъемом (h) элемента (119) шасси, и рамная ходовая часть выполнена с возможностью перевозки сменного контейнера, представляющего собой грузовой блок (120).
9. Моторное транспортное средство (110) по п.7, отличающееся тем, что транспортное средство (110) содержит сцепное устройство (111) типа «пятое колесо», подъем которого над поверхностью (150) является регулируемым вместе с подъемом (h) элемента (119) шасси, и сцепное устройство (111) выполнено с возможностью сцепки с прицепом, представляющим собой грузовой блок (120).
10. Способ регулирования подъема (h) элемента (119) шасси моторного транспортного средства (110) над поверхностью (150), на которой размещается транспортное средство (110), причем элемент (119) шасси выполнен с возможностью перевозки загружаемого и выгружаемого грузового блока (120), а подъем (h) регулируется посредством механизма (112, 114) управления уровнем, работающего на текучей среде, грузовой блок (120) имеет по меньшей мере одну опорную стойку (122; 122а, 122b), выполненную с возможностью, когда во включенном положении выдвинута по направлению к поверхности (150), допущения автономного размещения грузового блока (120), причем способ содержит подъем элемента (119) шасси относительно земли (150), регистрацию параметра высоты, обозначающего подъем (h) и регистрацию уровня (Р) давления текучей среды в камере (112) для текучей среды механизма управления уровнем, отличающийся в процессе подъема элемента (119) шасси, исследованием, выполняется или нет первый критерий в отношении контролируемого параметра, выражающего степень повышения уровня (Р) давления текучей среды на единицу подъема (h) и, если первый критерий выполняется, исследованием выполняется или нет второй критерий в отношении контролируемого параметра, и прекращением подъема элемента (119) шасси в ответ на выполнение второго критерия.
11. Способ по п.10, отличающийся тем, что первый критерий выполняется, если наклон графика уровня (Р) давления текучей среды, выраженный как функция подъема (h), является положительным.
12. Способ по п.11, отличающийся тем, что первый критерий выполняется, если наклон графика уровня (Р) давления текучей среды, выраженный как функция подъема (h), располагается в первом интервале (mα) угла наклона на протяжении первого порогового подъема (h1).
13. Способ по любому из пп.10-12, отличающийся тем, что второй критерий выполняется при невыполнении первого критерия.
14. Способ по п.13, отличающийся тем, что второй критерий выполняется, если наклон графика уровня (Р) давления текучей среды, выраженный как функция подъема (h), располагается во втором интервале (mβ) угла наклона, находящегося в диапазоне от предельного отрицательного наклона до положительного наклона, требующегося для выполнения первого критерия.
15. Способ по п.14, отличающийся тем, что второй критерий выполняется в случае, если наклон графика уровня (Р) давления текучей среды, выраженный как функция подъема (h), располагается во втором интервале (mβ) угла наклона, на протяжении второго порогового подъема (h2).
| Ручная косилка | 1990 |
|
SU1695847A1 |
| JP 6219128 A, 09.08.1994 | |||
| US 2005236781 А1, 27.10.2005 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПОДЪЕМА КОНТЕЙНЕРА ИЛИ АНАЛОГИЧНОГО ГРУЗА НА ПОГРУЗОЧНУЮ ПЛАТФОРМУ И СНЯТИЯ ИХ С НЕЕ | 1994 |
|
RU2131363C1 |

