Предлагаемое устройство предназначено для применения в области авиационного приборостроения, в частности пилотажно-навигационного оборудования летательных аппаратов (ЛА).
Известны устройства управления ЛА при полете по маршруту, реализующие вывод ЛА на линию заданного пути (ЛЗП) при полете по маршруту маршрутным способом. Эти устройства обеспечивают выработку управляющих сигналов, подаваемых на органы управления угловым положением ЛА с целью пролета заданного маршрута, состоящего из отрезков прямых, соединяющих запрограммированные перед полетом навигационные точки.
Теоретические основы функционирования таких устройств приведены в следующих работах.
1. Батенко А.П. Управление конечным состоянием движущихся объектов.- М.: Советское радио, 1977. - 256 с.
2. Воробьев Л.М. Воздушная навигация. - М.: Машиностроение, 1984. - 256 с.
3. Гуськов Ю.П. Дискретно-непрерывное управление программным выведением самолетов. - М.: Машиностроение, 1987. - 128 с.
4. Красовский Н.Н. Теория управления движением. - М.: Наука, 1968. - 476 с.
5. Рогожин В.О., Синеглазов В.М., Фiляшкiн М.К. Пiлотажно-навiгацiйнi комплекси повiтряних суден. - К.: Книжкове видавництво НАУ, 2005. - 316 с. (на украинском языке).
6. Черный М.А., Кораблин В.И. Самолетовождение. - М.: Транспорт, 1973. - 368 с.
7. Черный М.А., Кораблин В.И. Воздушная навигация. - М.: Транспорт, 1983. - 384 с.
Из известных устройств наиболее близким по технической сущности является устройство, реализующее способ управления ЛА при полете по маршруту, описанный в вышеупомянутой книге [5] "Пилотажно-навигационные комплексы воздушных судов" в параграфе 7.8. Данное устройство выбирается в качестве прототипа.
Рисунок, характеризующий работу прототипа, изображен на стр.223 указанной книги (рис.7.34), а его аутентичная копия представлена на фиг.1 материалов заявки.
Как следует из рисунка и содержания параграфа 7.8 указанной книги, в прототипе построение траектории полета ЛА по маршруту маршрутным методом зависит от величины бокового отклонения ЛА от текущей ЛЗП и разбито на три этапа.
На первом этапе при возникновении в силу каких либо причин большого бокового отклонения ЛА от ЛЗП для обеспечения наиболее быстрого возвращения ЛА на ЛЗП в качестве заданной траектории используется линия, перпендикулярная ЛЗП.
На втором этапе при нахождении ЛА в области, где боковое отклонение от ЛЗП больше допустимой ошибки выхода на ЛЗП ΔR и меньше суммы минимально возможного радиуса разворота Rp и допустимой ошибки выхода на ЛЗП ΔR, в качестве заданной траектории используется окружность с минимально возможным радиусом разворота Rp, которая проходит через точку текущего местоположения ЛА и одновременно является касательной к линии, параллельной ЛЗП и смещенной в сторону ЛА на величину допустимой ошибки выхода на ЛЗП ΔR.
На третьем этапе при нахождении ЛА в диапазоне боковых отклонений от ЛЗП, меньших допустимой ошибки выхода на ЛЗП ΔR, в качестве заданной траектории используется линия экспоненциального типа, в пределе сливающаяся с ЛЗП.
В процессе реализации автоматического режима полета по маршруту маршрутным методом используют известные законы управления боковым движением центра масс через контур управления креном ЛА.
В вышеуказанной книге [5] на стр.220 приведены следующие две зависимости заданного крена γз от параметров полета ЛА:


где Fгp - функция ограничения заданного угла крена, Z - боковое отклонение центра масс ЛА от текущей заданной траектории, pZ=VZ - скорость изменения бокового отклонения центра масс ЛА от текущей заданной траектории, ψ=ψИ+αсн - текущий путевой угол ЛА, ψИ - истинный курс ЛА, αсн - угол сноса ЛА, ψЗНП - заданное направление полета, Kγ, Kz, KVz, Kψ - весовые коэффициенты учета соответствующих параметров.
Из описания прототипа следует, что на указанных выше этапах полета ЛА по маршруту маршрутным методом входные параметры при определении заданного крена γз формируются следующим образом:
1-й этап
Z=0;
VZ=WX - составляющая путевой скорости ЛА по продольной оси ЛЗП;
ψЗНП=ψЛЗП+90°·signZ - направление перпендикуляра к ЛЗП;
ψЛЗП - направление ЛЗП;
signZ - параметр, учитывающий нахождение ЛА в соответствующей полуплоскости относительно ЛЗП и равный 1 или -1.
2-й этап
Z=0;
VZ=WZ·sinψR+WX·cosψR·signZ - проекция вектора путевой скорости ЛА на радиус, соединяющий точку местоположения ЛА с центром окружности с минимально возможным радиусом разворота;
ψЗНП=ψЛЗП-(ψR-90°)·signZ - направление линии, касательной к окружности с минимально возможным радиусом разворота в точке местоположения ЛА;
ψR=arcsin[(RP-|Zла|+ΔR)/RP];
RP=W2/(G·tgγP) - минимально возможный радиус разворота ЛА;
ΔR - величина допустимой ошибки выхода на ЛЗП, равная константе;
Zла - боковое отклонение центра масс ЛА от ЛЗП;
W - модуль вектора путевой скорости ЛА;
G - ускорение силы тяжести;
γР - максимально допустимый крен при текущих высоте и скорости.
3-й этап
Z=Zла;
VZ=WZ - составляющая вектора путевой скорости ЛА по боковой оси ЛЗП;
ψЗНП=ψЛЗП.
При полете по маршруту в автоматическом режиме использование законов (1) или (2), в целом, дает эквивалентные результаты. Однако при полете по маршруту в ручном режиме пилоту одновременно и правильно учесть боковое отклонение и скорость бокового отклонения практически невозможно. В этом случае, как следует из содержания книги [5], пилот учитывает два параметра: в первую очередь, рассогласование текущего и заданного курсов ЛА, а во вторую - боковое отклонение. Поэтому, как правило, на соответствующих индикационных приборах на одной круговой шкале одновременно индицируют истинный курс ЛА и заданный курс, который определяют с учетом угла сноса следующим образом ψЗК=ψЗНП-αсн, а внутри круговой шкалы в виде вертикально ориентированной планки также индицируют боковое отклонение от текущей заданной траектории.
Поэтому для большей общности полагаем, что основными сигналами как в автоматическом, так и в ручном режимах управления ЛА являются боковое отклонение от текущей заданной траектории Z, текущий путевой угол ЛА ψ=ψИ+αсн заданное направление полета ψЗНП, т.е. при формировании заданного крена основным является закон (2), который с учетом сказанного в предыдущем абзаце выглядит следующим образом:

и на указанных выше 3-х этапах полета ЛА по маршруту маршрутным методом входные параметры при определении заданного крена γз формируются следующим образом:
1-й этап: Z=0; ψЗК=ψЛЗП-αсн+90°·signZ.
2-й этап: Z=0; ψЗК=ψЛЗП-αсн-ψP·signZ+90°·signZ.
3-й этап: Z=Zла; ψЗК=ψЛЗП-αсн.
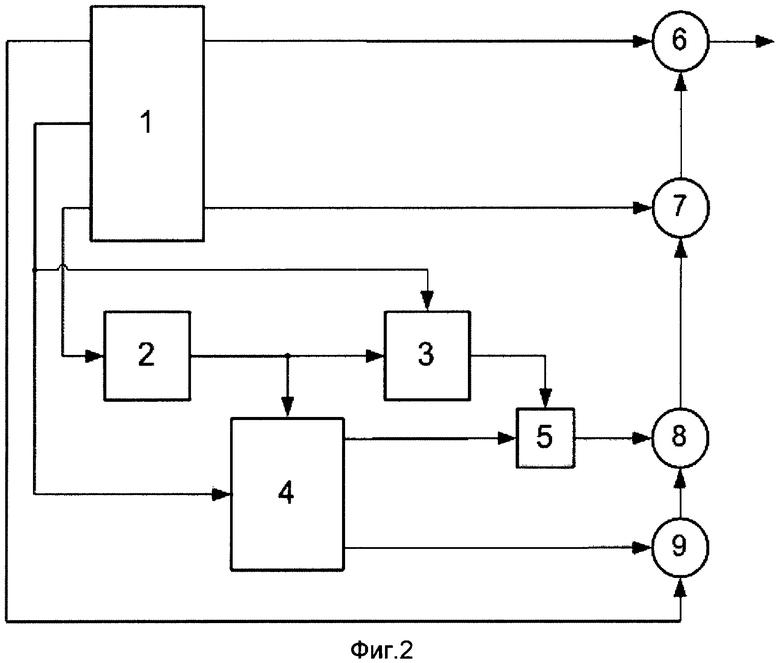
С учетом вышесказанного на фиг.2 представлена блок-схема устройства-прототипа, на которой обозначены: 1 - навигационная система (НС); 2 - блок определения минимально возможного радиуса разворота (БОР); 3 - нелинейный преобразователь (НП); 4 - анализатор положения (АП); 5 - множительное устройство (МУ); 6, 7, 8, 9 - первый, второй, третий и четвертый сумматоры (СМ).
Таким образом, устройство-прототип с учетом только существенных для предлагаемого изобретения признаков содержит последовательно соединенные навигационную систему (НС), блок определения минимально возможного радиуса разворота (БОР), нелинейный преобразователь (НП), множительное устройство (МУ), третий, второй и первый сумматоры (СМ), второй вход которого соединен со вторым выходом НС, а третий выход НС через последовательно соединенные анализатор положения (АП) и четвертый СМ подан на второй вход третьего СМ, причем вторые входы МУ, АП, НП, второго и четвертого СМ соединены соответственно с вторым выходом АП, выходом БОР, третьим, четвертым и пятым выходами НС.
Устройство-прототип функционирует следующим образом.
НС 1 измеряет все необходимые для функционирования устройства навигационные сигналы и на пяти выходах формирует соответственно следующие параметры: путевую скорость W, истинный курс ψИ, боковое отклонение от ЛЗП Zла, угол сноса αсн и направление ЛЗП ψЛЗП.
В БОР 2 формируется сигнал, соответствующий минимально возможному радиусу разворота:
RP=W2/(G·tgγP).
В НП 3 формируется сигнал, соответствующий углу:
ψR=arcsin[(RP-|Zла|+ΔR)/RP],
где ΔR - величина допустимой ошибки выхода на ЛЗП, равная константе.
В АП 4 формируются два сигнала АП1 на первом выходе и АП2 на втором выходе, которые в зависимости от параметров Zла и RP принимают следующие значения:
В МУ 5 формируется сигнал, соответствующий произведению сигналов ψR и АП2, т.е:
• |Zла|≥RP+ΔR: на выходе МУ нулевой сигнал;
• RP+ΔR>|Zла|≤ΔR: на выходе МУ ψR при Zла≥0 и -ψR при Zла<0;
• |Zла|<ΔR: на выходе МУ нулевой сигнал.
Во втором, третьем и четвертом сумматорах путем последовательного сложения сигналов ψЛЗП, αсн из НС 1 и выходных сигналов из МУ 5 и АП1 из АП 4 и формируется сигнал заданного курса ψЗК.
Выходными сигналами устройства являются рассогласование текущего ψИ и заданного ψЗК курсов на выходе первого сумматора и сигнал Zла из НС.
Основным недостатком этого устройства управления является неоднозначность процедур управления при полете по маршруту в ручном режиме при |Zла|<ΔR. Т.к. заданный курс с учетом угла сноса равен направлению ЛЗП, то рассогласование текущего и заданного курсов не дает полной информации о требуемой траектории полета, и пилоту в этом случае необходимо также ориентироваться на величину бокового отклонения от ЛЗП, что усложняет процедуру управления ЛА и может приводить к неточным и неоптимальным траекториям движения по ЛЗП.
Целью предлагаемого изобретения является упрощение процедур ручного управления ЛА при полете по маршруту. Эта цель может быть достигнута, если всю информацию о требуемой траектории движения ЛА, в том числе при |Zла|<ΔR, заложить в сигнал заданного курса. В результате необходимость учета летчиком при ручном управлении ЛА сигнала бокового отклонения отпадет. Достижение этой цели позволит также упростить контур автоматического управления ЛА, т.к. закон управления с использованием только одного входного параметра более прост при реализации.
Устранить указанный недостаток прототипа можно, если производить переключение процесса формирования заданного курса со второго этапа на третий предварительно, еще до достижения бокового отклонения от ЛЗП значения, равного допустимой ошибке выхода на ЛЗП, например при боковом отклонении, равном Zла=k·ΔR=1.1·ΔR, а затем на третьем этапе формировать заданный курс на точку, вынесенную вперед по ЛЗП на расстояние, зависящее от скорости и бокового отклонения от ЛЗП. Для достижения поставленной цели достаточно обеспечить прямо пропорциональную зависимость величины выноса от скорости и обратно пропорциональную зависимость величины выноса от бокового отклонения от ЛЗП. При этом необходимо обеспечить безударное переключение процесса формирования заданного курса при переходе со второго этапа на третий. Т.е. в точке переключения заданный курс, формируемый на втором этапе, должен быть равен заданному курсу, формируемому на третьем этапе.
Эти условия будут выполнены, если продольная координата вынесенной точки на ЛЗП относительно ЛА ХТ будет формироваться следующим образом:
ХТ=K·(W/Zла),
где коэффициент K, обеспечивая безударный характер переключения процесса формирования заданного курса при переходе со второго этапа на третий, зависит от параметров Z3 и ΔR, описывающих геометрию схемы выхода на ЛЗП, динамических характеристик конкретного ЛА и определяется соотношением
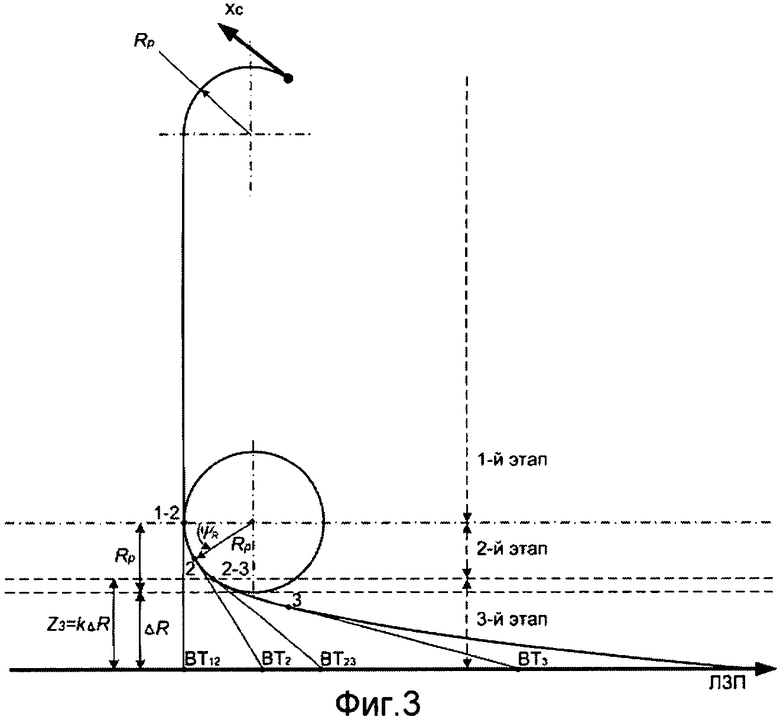
которое получено из предположения, что коэффициент k=Z3/ΔR - коэффициент отношения ширины зоны третьего этапа к допустимой ошибке выхода на ЛЗП (см. фиг.3) находится в диапазоне k=1.05÷1.2.
Таким образом, с учетом только значимых для предлагаемого изобретения признаков технический результат в части упрощения процедур ручного управления ЛА при полете по маршруту и их унификации с процедурами автоматического управления ЛА обеспечивается тем, что в устройстве управления траекторией ЛА при полете маршруту, содержащем последовательно соединенные навигационную систему, блок определения минимально возможного радиуса разворота, нелинейный преобразователь, множительное устройство, третий, второй и первый сумматоры, вход которого соединен со вторым выходом навигационной системы, а третий выход навигационной системы через последовательно соединенные анализатор положения и четвертый сумматор подан на второй вход третьего сумматора, причем вторые входы множительного устройства, анализатора положения, нелинейного преобразователя и второго сумматора соединены соответственно со вторым выходом анализатора положения, выходом блока определения минимально возможного радиуса разворота, третьим и четвертым выходами навигационной системы, между третьим выходом навигационной системы и вторым входом четвертого сумматора дополнительно введены последовательно соединенные делительное устройство, усилитель, второй нелинейный преобразователь, второе множительное устройство и пятый сумматор, причем вторые входы делительного устройства, второго нелинейного преобразователя, пятого сумматора и второго множительного устройства соединены соответственно с первым, третьим, пятым выходами навигационной системы и третьим выходом анализатора положения.
На фиг.3 представлен рисунок, иллюстрирующий работу предлагаемого устройства. Рисунок иллюстрирует геометрическую схему возврата ЛА на ЛЗП из точки с большим боковым отклонением от ЛЗП.
На фиг.4 представлена блок-схема предлагаемого устройства, на которой обозначены: 1 - НС; 2 - БОР; 3, 12 - первый и второй НП; 4 - АП; 5, 13 - первое и второе МУ; 6, 7, 8, 9, 14 - первый, второй, третий, четвертый и пятый СМ; 10 - делительное устройство (ДУ); 11 - усилитель (У).
НС 1 измеряет все необходимые для функционирования устройства навигационные сигналы и на пяти выходах формирует соответственно следующие параметры: путевую скорость W, истинный курс ψИ, боковое отклонение от ЛЗП Zла, угол сноса αсн и направление ЛЗП ψЛЗП.
В БОР 2 формируется сигнал, соответствующий минимально возможному радиусу разворота:
RP=W2/(G·tgγP).
В НП 3 формируется сигнал, соответствующий углу:
ψR=arcsin[(RP-|Zла|+ΔR)/RP],
где ΔR - величина допустимой ошибки выхода на ЛЗП, равная константе.
В АП 4 формируются три сигнала АП1 на первом выходе, АП2 на втором выходе и АП3 на третьем выходе, которые в зависимости от параметров Zла и RP принимают следующие значения:
В МУ 5 формируется сигнал, соответствующий произведению сигналов ψR и АП2, т.е:
• при |Zла|≥RP+ΔR: на выходе МУ нулевой сигнал;
• при RP+ΔR>|Zла|≤k·ΔR: на выходе МУ ψR при Zла≥0 и -ψR при Zла<0;
• при |Zла|<k·ΔR: на выходе МУ нулевой сигнал.
В делительном устройстве 10 и усилителе 11 формируется сигнал, соответствующий координате местоположения вынесенной по ЛЗП относительно ЛА точки ХТ=K·(W/Zла).
Во втором НП 12 формируется сигнал, соответствующий углу:
ψ=arctg[Zла/ХТ].
В МУ 13 формируются сигнал, соответствующий произведению сигналов ψ и АП3, т.е:
• |Zла|≥RP+ΔR: на выходе МУ нулевой сигнал;
• RP+ΔR>|Zла|≤k·ΔR: на выходе МУ нулевой сигнал;
• |Zла|<k·ΔR: на выходе МУ ψ при Zла≥0 и -ψ при Zла<0.
Во втором, третьем, четвертом и пятом сумматорах путем последовательного сложения сигналов ψЛЗП, αсн из НС 1, выходных сигналов МУ 5, МУ 13 и АП1 из АП 4 формируется сигнал заданного курса ψЗК.
Выходным сигналом устройства является рассогласование текущего ψИ и заданного ψЗК курсов на выходе первого сумматора.
Отработка пилотом рассогласования заданного и текущего курса ЛА с использованием информации, считываемой с соответствующих индикаторов, обеспечивает полет ЛА по заданному маршруту в ручном режиме.
Отработка рассогласования заданного и текущего курса ЛА с помощью системы автоматического управления обеспечивает полет ЛА по заданному маршруту в автоматическом режиме.
Таким образом, на примерах реализации показано достижение технических результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОЛЕТЕ ПО МАРШРУТУ | 2010 |
|
RU2444775C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВОЗВРАТЕ НА КОРАБЛЬ | 2011 |
|
RU2450312C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА НАВИГАЦИОННУЮ ТОЧКУ С ЗАДАННОГО НАПРАВЛЕНИЯ | 2015 |
|
RU2585204C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2590936C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВЫХОДЕ НА ЛИНИЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2003 |
|
RU2240589C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ЗАХОДА НА ПОСАДКУ | 2008 |
|
RU2364943C1 |
| Комплексная система подготовки, навигации и управления летательного аппарата | 2015 |
|
RU2614194C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ИСТОЧНИК ИЗЛУЧЕНИЯ | 2017 |
|
RU2705669C2 |
| Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления | 2015 |
|
RU2607305C1 |
Изобретение относится к области навигационного приборостроения и может быть использовано в составе комплексов пилотажно-навигационного оборудования летательных аппаратов (ЛА). Техническим результатом является упрощение процедур ручного управления ЛА при полете по маршруту и их унификация с процедурами автоматического управления ЛА. Устройство содержит навигационную систему, блок определения минимально возможного радиуса разворота, два нелинейных преобразователя, анализатор положения, два множительных устройства, пять сумматоров, делительное устройство, усилитель. 4 ил.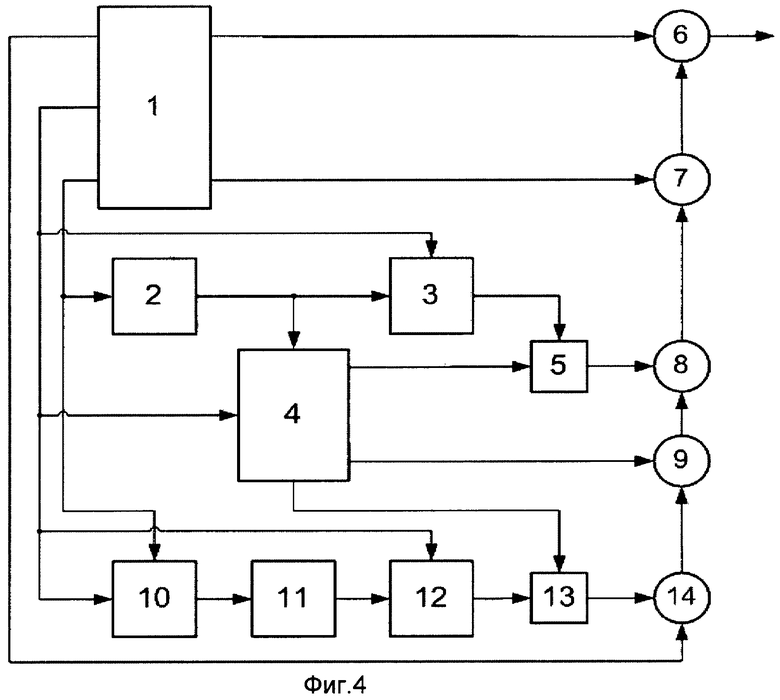
Устройство управления траекторией летательного аппарата при полете по маршруту, содержащее последовательно соединенные навигационную систему, блок определения минимально возможного радиуса разворота, нелинейный преобразователь, множительное устройство, третий, второй и первый сумматоры, вход которого соединен со вторым выходом навигационной системы, а третий выход навигационной системы через последовательно соединенные анализатор положения и четвертый сумматор подан на второй вход третьего сумматора, причем вторые входы множительного устройства, анализатора положения, нелинейного преобразователя и второго сумматора соединены соответственно с вторым выходом анализатора положения, выходом блока определения минимально возможного радиуса разворота, третьим и четвертым выходами навигационной системы, отличающееся тем, что в него между третьим выходом навигационной системы и вторым входом четвертого сумматора введены последовательно соединенные делительное устройство, усилитель, второй нелинейный преобразователь, второе множительное устройство и пятый сумматор, причем вторые входы делительного устройства, второго нелинейного преобразователя, пятого сумматора и второго множительного устройства соединены соответственно с первым, третьим, пятым выходами навигационной системы и третьим выходом анализатора положения.
| УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2008 |
|
RU2367992C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2305859C1 |
| Способ определения отклонения транспортного средства от заданной траектории | 1985 |
|
SU1332268A1 |
| FR 2939214 A1, 04.06.2010. | |||

