Изобретение относится к устройствам управления для бортовых систем автоматического управления летательными аппаратами с реализацией режимов координированных разворотов.
Известны устройства управления для систем, в которых каналы управления креном и курсом содержат элементы вычитания и суммирующие усилители, формирующие по задающим воздействиям и сигналам датчиков состояния управляющие воздействия на исполнительные приводы летательного аппарата [1].
Недостатком такой реализации является ограниченность возможностей управления и невысокая динамическая точность.
Наиболее близким к предлагаемому изобретению является устройство координированного управления летательным аппаратом, содержащее инвертирующий усилитель, последовательно соединенные датчик угловой скорости по крену и первый суммирующий усилитель, последовательно соединенные задатчик сигнала управления по курсу, первый блок вычитания и второй суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости по курсу, последовательно соединенные первый нелинейный элемент с ограничением, второй блок вычитания, выход которого соединен с первым суммирующим усилителем, а второй вход с выходом датчика угла крена, датчик угла курса, выход которого соединен со вторым входом первого блока вычитания [2].
Недостатком известного устройства являются ограниченные функциональные возможности и невысокая динамическая точность управления.
Решаемой в предложенной системе управления технической задачей является расширение функциональных возможностей и повышение динамической точности управления. Предложенным построением устройства управления достигается функциональная возможность достижения максимальной интенсивности управления и увеличение динамической точности.
Указанный технический результат достигается тем, что в известное устройство координированного управления летательным аппаратом, содержащее инвертирующий усилитель, последовательно соединенные датчик угловой скорости по крену и первый суммирующий усилитель, последовательно соединенные задатчик сигнала управления по курсу, первый блок вычитания и второй суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости по курсу, последовательно соединенные первый нелинейный элемент с ограничением, второй блок вычитания, выход которого соединен с первым суммирующим усилителем, а второй вход с выходом датчика угла крена, датчик угла курса, выход которого соединен со вторым входом первого блока вычитания, дополнительно введен второй нелинейный элемент с ограничением, вход которого соединен с выходом первого суммирующего усилителя, а выход является выходом устройства, при этом выход второго суммирующего усилителя соединен через инвертирующий усилитель со входом первого нелинейного элемента с ограничением.
Действительно, при этом обеспечивается максимальная отработка угла курса посредством маневров по крену, т.е. расширение зоны разворотов с большими углами крена.
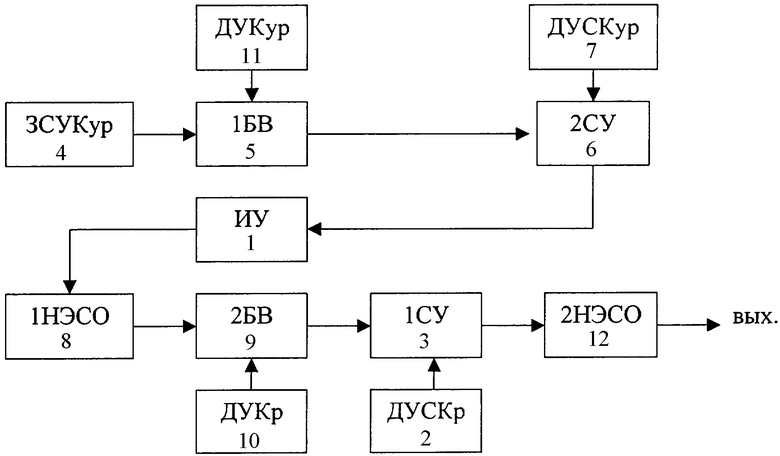
На чертеже представлена структурная схема устройства координированного управления.
Устройство координированного управления летательным аппаратом содержит инвертирующий усилитель 1 (ИУ), последовательно соединенные датчик угловой скорости по крену 2 (ДУСКр) и первый суммирующий усилитель 3 (1 СУ), последовательно соединенные задатчик сигнала управления по курсу 4 (ЗСУКур), первый блок вычитания 5 (1БВ) и второй суммирующий усилитель 6 (2СУ), второй вход которого соединен с выходом датчика угловой скорости по курсу 7 (ДУСКур), последовательно соединенные первый нелинейный элемент с ограничением 8 (1НЭСО), второй блок вычитания 9 (2БВ), выход которого соединен с первым суммирующим усилителем 3, а второй вход с выходом датчика угла крена 10 (ДУКр), датчик угла курса 11 (ДУКур), выход которого соединен со вторым входом первого блока вычитания 5. Кроме того, устройство содержит второй нелинейный элемент с ограничением 12 (2НЭСО), вход которого соединен с выходом первого суммирующего усилителя 3, а выход является выходом устройства, при этом выход второго суммирующего усилителя 6 соединен через инвертирующий усилитель 1 со входом первого нелинейного элемента с ограничением 8.
Устройство координированного управления работает следующим образом.
Основные сигналы управления в каналах курса σΨ и крена σγ формируются, соответственно, блоками 4, 5, 6, 7, 11 канала курса и 1, 2, 3, 9 канала крена:




где К1ψ, K2ψ - передаточные коэффициенты второго суммирующего усилителя 6;
Δψ - сигнал рассогласования по курсу на выходе первого блока вычитания 5;
ψ - сигнал датчика угла курса 11;
ψзад - задающий сигнал по курсу на выходе задатчика сигнала управления по курсу 4;
ωу - сигнал датчика угловой скорости по курсу 7;
К1γ, К2γ - передаточные коэффициенты первого суммирующего усилителя 3;
Δγ - сигнал рассогласования по крену на выходе второго блока вычитания 9;
γ - сигнал датчика угла крена 10;
γупр - управляющий сигнал по крену на выходе нелинейного элемента с ограничением 8;
ωх - сигнал датчика угловой скорости по крену 2.
Сигнал γупр. формируется специальным каналом координированного управления, подключенным входом по сигналу σψ - к выходу второго суммирующего усилителя 6, а выходом ко входу второго блока вычитания 9. Канал содержит последовательно соединенные блоки 1 и 8. Формирование сигнала γупр. по сигналу курса σΨ позволяет в целом достичь требуемых демпфирующих свойств процессов движения по крену.
Устройство координированного управления работает в режиме стабилизации и управления значений ψзад через канал крена. А именно. При отработке больших сигналов ψзад канал курса формирует σψ, а канал крена - в режиме координированного управления с отработкой сигнала γупр≠0 и с инвертированием и ограничением сигнала σψ.
Инвертирующий усилитель 1 этого канала устройства позволяет реализовать сам принцип координированного управления благодаря инвертизации входного сигнала и выбрать оптимальное значение степени усиления. Первый нелинейный элемент с ограничением 8 обеспечивает требуемое ограничение сигнала γупр для канала крена в соответствии с техническими ограничениями на летательный аппарат по углу крена. Второй нелинейный элемент с ограничением 12 обеспечивает выполнение ограничения координированного сигнала управления для подачи на рулевой привод летательного аппарата.
Все блоки устройства управления являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники.
Таким образом, предложенное устройство управления позволяет расширить функциональные возможности системы и повысить динамическую точность управления.
Источники информации
1. И.А.Михалев и др. Системы автоматического управления самолетом. - М.: Машиностроение, 1987 г., с.174.
2. Патент РФ №2237269 от 03.04.2003 г., G05D 1/08.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2008 |
|
RU2367993C1 |
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2532720C1 |
| МОДЕРНИЗИРОВАННОЕ АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2554515C1 |
| Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления | 2016 |
|
RU2631736C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339990C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2237269C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ СИГНАЛОВ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2238582C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
Изобретение относится к области приборостроения и может найти применение в бортовых системах автоматического управления летательными аппаратами с реализацией режимов координированных разворотов. Технический результат - расширение функциональных возможностей и повышение динамической точности управления. Для достижения данной цели устройство управления содержит датчик угла крена, датчик угловой скорости по крену, датчик угла курса, датчик угловой скорости по курсу, первый и второй суммирующие усилители, задатчик сигнала управления по курсу, первый и второй блоки вычитания, инвертирующий усилитель, первый и второй нелинейные элементы с ограничением. 1 ил.
Устройство координированного управления летательным аппаратом, содержащее инвертирующий усилитель, последовательно соединенные датчик угловой скорости по крену и первый суммирующий усилитель, последовательно соединенные задатчик сигнала управления по курсу, первый блок вычитания и второй суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости по курсу, последовательно соединенные первый нелинейный элемент с ограничением, второй блок вычитания, выход которого соединен с первым суммирующим усилителем, а второй вход с выходом датчика угла крена, датчик угла курса, выход которого соединен со вторым входом первого блока вычитания, отличающееся тем, что оно содержит второй нелинейный элемент с ограничением, вход которого соединен с выходом первого суммирующего усилителя, а выход является выходом устройства, при этом выход второго суммирующего усилителя соединен через инвертирующий усилитель со входом первого нелинейного элемента с ограничением.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2237269C1 |
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174 | |||
| Боднер В.А | |||
| Теория автоматического управления полетом | |||
| - М.: Наука, 1964, с.113 | |||
| Бортовые системы управления полетом | |||
| / Под общей редакцией Ю.В.Байбородина | |||
| - М.: Транспорт, 1975, с.103-108 | |||
| Шаров С.Н | |||
| Основы проектирования | |||

