Предлагаемое изобретение относится к области авиационного приборостроения.
Известны способы управления летательным аппаратом (ЛА), реализующие вывод ЛА на линию, направленную вдоль продольной оси взлетно-посадочной полосы (ВПП), при заходе на посадку, описанные в следующих источниках - [1], [2] с. 11-21, [3] с. 221.
В способе управления предпосадочными маневрами МТКК Space Shuttle [2] предпосадочное движение разбивается на четыре фазы:
0) s-образные развороты,
1) полет на точку касания вынесенного по линии ВПП цилиндра,
2) полет по цилиндру для выравнивания текущего направления на направление ВПП,
3) предзавершающее управление.
Фаза s-образных разворотов имеет место, когда ЛА обладает избыточным запасом условной энергии, избыток которой он ликвидирует на этой фазе до подхода к аэродрому. После этого фазы 1-3 выполняются только с минимально необходимым (в пределах возможной точности) уровнем энергии.
Такой способ управления целесообразно использовать для управления ЛА, выполняющими возврат на аэродром в режиме планирования (таким является МТКК Space Shuttle), поскольку для этого типа ЛА посадка должна быть выполнена с первого захода и наличие большой избыточной энергии на фазах 1-3 недопустимо с точки зрения безопасности полета.
Использование такого способа управления для ЛА, управляемого при возврате двигателями, приводит к возникновению недостатков, связанных с тем, что не всегда является целесообразным рассеивание энергии (гашение скорости и снижение) на большом удалении от аэродрома. Кроме этого, в зависимости от создавшейся в районе аэродрома воздушной обстановки, возможно, что ЛА не сразу будет принят на аэродром, а будет находиться в зоне ожидания или вынужден будет выполнить повторный заход на посадку (для гражданских ЛА нормальным считается уход на повторный заход до 3% из всех заходов на посадку (см. [4], с. 31).
Таким образом, данный способ управления имеет недостатки, связанные с уменьшением безопасности полета и выполнением не всегда оптимального управления, если способ применяется для ЛА, имеющего избыточный запас энергии при возврате на аэродром посадки.
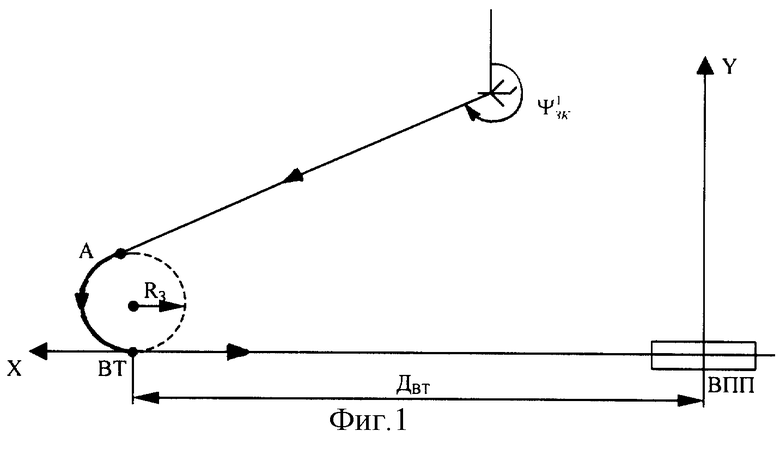
В способе управления, описанном в регламенте эксплуатации изделия 911-02 (см. [1]), управление ЛА осуществляется первоначально на точку А касания окружности (см. фиг. 1), вынесенной по оси ВПП на расстояние Двт от ее центра, а затем по этой окружности до выхода на линию ВПП (см. фиг. 1). Радиус этой окружности R3 определяется в зависимости от значения заданной скорости Vзад, которую ЛА должен иметь в точке касания А в момент выхода на заданную высоту Н0. Таким образом обеспечивается минимум расстояния выхода ЛА на линию ВПП аэродрома, когда скорость ЛА велика на большом удалении и уменьшается по мере снижения и приближения к аэродрому до Vзад, на высоте Н0.
Данный способ основан на формировании по текущим координатам ЛА, истинному курсу, высоте полета, составляющей скорости ЛА в вертикальной плоскости, крену, нормальной перегрузке, управляющих воздействий и изменении углового положения самолета на основе сформированных воздействий.
Данный способ выбирается в качестве прототипа.
Основным недостатком этого способа управления является следующее: из-за того, что путевая скорость ЛА Vтек в точке касания вынесенной окружности может превышать заданную скорость Vзад в этой точке (например, вследствие ветровых возмущений или когда ЛА возвращается на аэродром с большой ("неразрешенной") высоты и для снижения к точке касания до заданной высоты Но развивает большую скорость), минимально возможный радиус разворота ЛА R
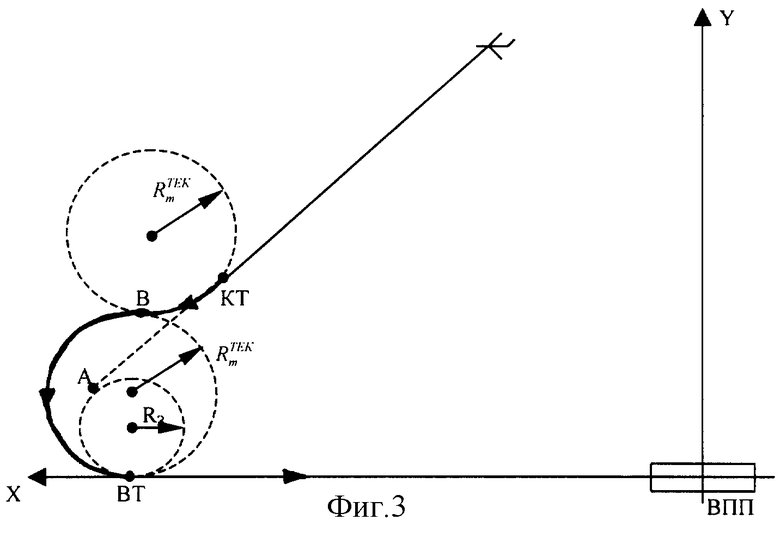
Техническим результатом при реализации настоящего изобретения является повышение точности формируемой траектории ЛА при выходе на линию ВПП в заданную точку выхода ВТ (см. фиг.3).
Данный технический результат достигается тем, что в известном способе управления, включающем формирование сигналов о заданном курсе и линейной дальности до точки касания заданной вынесенной окружности в зависимости от сигналов о координатах ЛА, координатах центра и радиуса вынесенной окружности, вычисленных по текущим координатам ЛА, курсу, высоте, вертикальной скорости, крену и нормальной перегрузке, формирование сигнала о программном значении высоты в зависимости от сигналов о заданной высоте ЛА, заданном угле наклона траектории и линейной дальности до точки касания заданной окружности, формирование сигналов управления заданной нормальной перегрузкой в зависимости от значений вертикальной скорости ЛА, текущей и программной высотах, формирование сигнала управления заданным креном в зависимости от значений истинного и заданного курсов ЛА в сторону вынесенной окружности, формирование сигналов управления изменением углового положения ЛА, дополнительно формируют сигнал текущего минимально возможного радиуса разворота в зависимости от значений путевой скорости ЛА и максимально возможного угла крена, формируют сигнал критической дальности до точки касания вынесенной окружности в зависимости от значений заданного курса, минимально возможного радиуса разворота и радиуса заданной вынесенной окружности, формируют управляющий сигнал заданного угла крена в сторону, противоположную направлению на вынесенную окружность, начиная с момента совпадения значения сигнала линейной дальности до точки касания заданной вынесенной окружности со значением сигнала критической дальности и вплоть до момента пока сигнал линейной дальности до точки касания новой вынесенной окружности с радиусом, равным минимально возможному радиусу разворота, не станет равным нулю.
Дополнительные преимущества при достижении указанного технического результата: недопущение выхода ЛА из зоны действия посадочных радиосредств, увеличение безопасности полета в районе аэродрома, снижение расхода топлива.
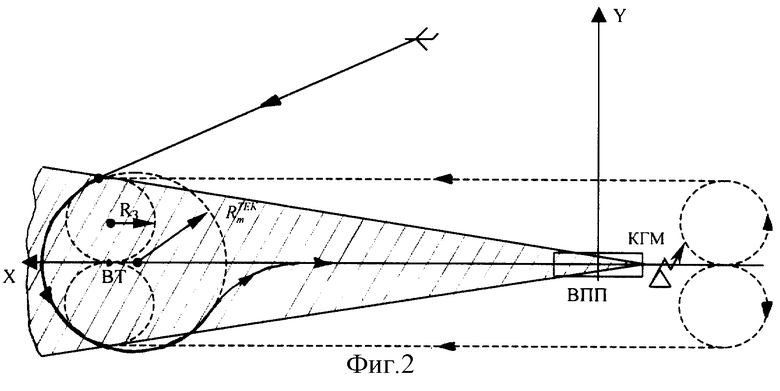
На фигурах 1 и 2 изображены траектории полета в горизонтальной плоскости, формируемые известным способом, когда скорость ЛА равна заданной (фиг. 1), и когда превышает ее (фиг. 2). На фигуре 3 представлена траектория полета в горизонтальной плоскости, формируемая предлагаемым способом, когда скорость ЛА может превышать заданную.
Реализация предложенного способа управления осуществляется следующим образом.
По текущим координатам ЛА (ХТ, VТ) и заданным координатам центра вынесенной окружности (Х0=ДВТ, V0=RЗ) определяется заданный курс ЛА  на точку касания А вынесенной окружности в системе координат, связанной с ВПП (см. фиг.3):
на точку касания А вынесенной окружности в системе координат, связанной с ВПП (см. фиг.3):

где RЗ=4 км - радиус заданной вынесенной окружности.
Сигнал заданного курса ΨЗК= вместе с сигналом истинного курса ЛА Ψи поступают в систему автоматического управления (САУ) ЛА, которая формирует сигнал крена по следующей зависимости:
вместе с сигналом истинного курса ЛА Ψи поступают в систему автоматического управления (САУ) ЛА, которая формирует сигнал крена по следующей зависимости:

где К1 - известный коэффициент.
После того, как истинный курс ЛА ΨИ совпал с заданным курсом ΨЗК сигнал γЗАД становится равным нулю и ЛА летит на точку А касания заданной вынесенной окружности.
В продольной плоскости САУ работает в режиме стабилизации программной высоты НПР по следующему закону:

где K2, К3 - известные коэффициенты,
Vу - значение вертикальной скорости ЛА,
Н - значение текущей высоты ЛА,
НПР=Н0+tg(θЗАД)·D - программное значение высоты,
θЗАД - заданный угол наклона траектории снижения,
Н0 - заданная высота ЛА в вынесенной точке,
 - линейная дальность до точки А касания заданной вынесенной окружности.
- линейная дальность до точки А касания заданной вынесенной окружности.
Отклонение рулевых поверхностей ЛА для маневра в продольной плоскости осуществляется по сигналу рассогласования между текущим и заданным ( ) значениями нормальной перегрузки.
) значениями нормальной перегрузки.
Значение критической дальности (см. фиг. 3: DКР - расстояние от т. А до т. КТ) формируется в зависимости от величин текущего минимально возможного радиуса разворота  , радиуса заданной вынесенной окружности, заданного курса:
, радиуса заданной вынесенной окружности, заданного курса:

где VТЕК - текущая путевая скорость ЛА,
γmax - максимально возможный угол крена ЛА,
g - ускорение силы тяжести.
В момент выхода ЛА в критическую точку КТ (см. фиг. 3), т.е. когда D=DКР, осуществляется отворот ЛА от текущего направления с креном, противоположным направлению на вынесенную окружность, путем формирования заданного курса  , который вычисляется, как и
, который вычисляется, как и  , по формуле (1), только на точку касания В (см. фиг. 3) новой сформированной окружности с координатами центра
, по формуле (1), только на точку касания В (см. фиг. 3) новой сформированной окружности с координатами центра  и радиусом
и радиусом  . При этом вычисляется линейная дальность D' от ЛА до точки В касания новой вынесенной окружности:
. При этом вычисляется линейная дальность D' от ЛА до точки В касания новой вынесенной окружности:

После прохождения ЛА точки В, т.е. когда D1 становится равной нулю, САУ формирует сигнал заданного крена теперь уже в другую сторону - по направлению к центру новой вынесенной окружности, на которую вышел ЛА. Сигнал γЗАД определяется согласно (2), где ΨЗК= формируется по следующей зависимости:
формируется по следующей зависимости:
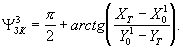
После прохождения вынесенной точки ВТ (см. фиг. 3) происходит выравнивание ЛА по линии ВПП с курсом, равным курсу ВПП.
Предлагаемый способ может быть реализован в бортовой цифровой вычислительной машине комплекса навигационного оборудования ЛА. Реализация предлагаемого способа не подразумевает изменение или дополнение аппаратуры, устанавливаемой на борту ЛА, и предполагает использование только известных сигналов и исполнительных механизмов комплекса навигационного оборудования ЛА.
Литература
1) Регламент эксплуатации изделия 911-02 (КМИВ.461535.001 РЭ).
2) H.L. Ehlers, J.W. Kramer "Shuttle Orbiter Guidance System for the Terminal Flight Phase", Automatica 1977, V13, №1.
3) Батенко А.П. Управление конечным состоянием движущихся объектов. М.: Советское радио, 1977 г., 256с.
4) Новодворский Д. - Е.П. и др. Методология летных испытаний, М.: Машиностроение, 1984 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВОЗВРАТЕ НА КОРАБЛЬ | 2011 |
|
RU2450312C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА НАВИГАЦИОННУЮ ТОЧКУ С ЗАДАННОГО НАПРАВЛЕНИЯ | 2015 |
|
RU2585204C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2590936C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| Способ вывода самолета в точку начала посадки | 2016 |
|
RU2628043C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
Изобретение относится к области авиационного приборостроения. Способ включает формирование сигналов о заданном курсе и линейной дальности до точки касания заданной вынесенной окружности в системе координат, связанной с взлетно-посадочной полосой, формирование сигнала о программном значении высоты, формирование сигналов управления нормальной перегрузкой, формирование сигнала управления креном, формирование сигналов управления изменением углового положения ЛА. Дополнительно формируют сигнал критической дальности до точки касания вынесенной окружности в зависимости от значений курса, минимально возможного радиуса разворота и радиуса заданной вынесенной окружности. Формируют управляющий сигнал заданного угла крена с момента совпадения значения сигнала линейной дальности до точки касания вынесенной окружности со значением сигнала критической дальности. Когда сигнал линейной дальности до точки касания новой вынесенной окружности с радиусом, равным минимально возможному радиусу разворота, станет равным нулю, после прохождения заданной вынесенной точки выхода происходит выравнивание ЛА по линии взлетно-посадочной полосы. Изобретение позволяет повысить точность формируемой траектории летательного аппарата. 3 ил.
Способ автоматического управления летательным аппаратом при выходе на линию взлетно-посадочной полосы, включающий формирование сигналов о заданном курсе и линейной дальности до точки касания заданной вынесенной окружности в системе координат, связанной с взлетно-посадочной полосой, в зависимости от сигналов о координатах летательного аппарата, координатах центра и радиуса вынесенной окружности, вычисленных по текущим координатам летательного аппарата, курсу, высоте, вертикальной скорости, крену и нормальной перегрузке, формирование сигнала о программном значении высоты в зависимости от сигналов о заданной высоте летательного аппарата, заданном угле наклона траектории и линейной дальности до точки касания заданной вынесенной окружности, формирование сигналов управления заданной нормальной перегрузкой в зависимости от значений вертикальной скорости летательного аппарата, текущей и программной высотах, формирование сигнала управления заданным креном в зависимости от значений истинного и заданного курсов летательного аппарата в сторону вынесенной окружности, формирование сигналов управления изменением углового положения летательного аппарата, отличающийся тем, что дополнительно формируют сигнал текущего минимально возможного радиуса разворота в зависимости от значений путевой скорости летательного аппарата и максимально возможного угла крена, формируют сигнал критической дальности до точки касания вынесенной окружности в зависимости от значений заданного курса, минимально возможного радиуса разворота и радиуса заданной вынесенной окружности, формируют управляющий сигнал заданного угла крена в сторону, противоположную направлению на вынесенную окружность, начиная с момента совпадения значения сигнала линейной дальности до точки касания заданной вынесенной окружности со значением сигнала критической дальности и вплоть до момента пока сигнал линейной дальности до точки касания новой вынесенной окружности с радиусом, равным минимально возможному радиусу разворота, не станет равным нулю, после прохождения заданной вынесенной точки выхода происходит выравнивание летательного аппарата по линии взлетно-посадочной полосы с курсом, равным курсу взлетно-посадочной полосы.
| US 4914436 А, 03.04.1990 | |||
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1990 |
|
RU2018785C1 |
| Устройство для формирования сигнала управления летательным аппаратом при заходе на посадку | 1989 |
|
SU1720933A1 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |
| Способ разгонки сырых продуктов хлорирования бензола | 1932 |
|
SU31007A1 |

