Изобретение относится к области авиации, более конкретно к приборному оборудованию, и может быть использовано для сокращения времени, расстояния и расхода топлива при заходе на посадку по произвольным траекториям, схемам визуальных заходов и заходов по приборам в режимах ручного, директорного и автоматического управления.
Уровень техники.
Известен «Способ пилотирования ЛА по задаваемой траектории с задаваемой скоростью» (патент RU 2129699, заявленный 03.07.1999), заключающийся в том, что «представляют подвижный индекс в виде треугольника, изображающего летательный аппарат при виде на него сзади вдоль вектора скорости и начинающегося от него вектора изменяемой длины, на конце которого расположена окружность изменяемого диаметра, причем ограничение на длину вектора изображается отрезком, изображают задаваемую траекторию полета в виде линии в пространстве, соединенной вертикальными отрезками со своей проекцией на горизонтальную плоскость, при этом задаваемую точку экрана изображают в виде креста, движущегося по задаваемой траектории, причем размер креста зависит от задаваемой скорости полета, совмещают подвижный индекс с задаваемой точкой экрана посредством окаймления креста окружностью вектора, при этом при снятии усилия с ручки управления обеспечивают движение летательного аппарата в направлении, указанном концом вектора».
Основной недостаток данного способа заключается в том, что он может быть использован только для полета по заранее заданной траектории.
Известен «Способ выполнения снижения при заходе на посадку» (патент RU №2280888, заявленный 24.12.2002), заключающийся в том, «что при заходе на посадку определяют расчетные точки начала и окончания 4-го разворота в зависимости от скорости полета, ветра, угла разворота на посадочный курс и заранее определенного крена, определяют развернутую дальность до ВПП как сумму расстояний от самолета до 4-го разворота, длины пути на развороте и расстояния от расчетной точки окончания 4-го разворота до ВПП, по развернутой дальности и заданным в зависимости от дальности углам наклона глиссады определяют расчетную высоту полета, сравнивают ее с фактической высотой полета и формируют сигнал рассогласования, который подают на планку отклонения от глиссады навигационно-пилотажного прибора и выполняют снижение, управляя вертикальной скоростью снижения таким образом, чтобы снижение происходило по расчетной глиссаде при нулевом рассогласовании между развернутой и глиссадной дальностями».
Недостаток этого способа заключаются в том, что он позволяет использовать режимы автоматического и директорного управления только в продольном канале, для управления вертикальной скоростью снижения, и не позволяет их использовать для управления креном.
Известен «Способ захода на посадку» (патент RU №2242800, заявленный 02.12.2002), заключающийся в том, что «на осевой линии ВПП задают точки окончания маневрирования, при полете к 4-му развороту определяют расчетную оптимальную траекторию захода на посадку, состоящую из прямолинейного полета вдоль вектора путевой скорости полета и прямолинейного участка полета вдоль оси ВПП, связанных между собой кривой разворота, имеющей расчетную (с учетом ветра) точку начала разворота на векторе путевой скорости и точку окончания разворота на оси ВПП, которые индицируют на экране, корректируют курс полета так, чтобы расстояние от кромки ВПП до расчетной точки окончания разворота было больше расстояния от кромки ВПП до заданной точки окончания маневрирования, определяют расстояние до расчетной точки начала разворота и при уменьшении его менее нуля формируют команду на начало разворота и выполняют разворот в сторону ВПП, подбирая крен таким образом, чтобы кривая проекции прогнозируемой траектории полета на горизонтальную плоскость касалась осевой линии ВПП, а после выхода на посадочный курс продолжают управление по крену таким образом, чтобы обеспечить совпадение проекции прогнозируемой траектории полета на горизонтальную плоскость с осевой линией ВПП».
Недостатки данного способа заключаются в том, что крен на развороте летчик может подбирать только в ручном режиме управления и не может использовать автопилот. Способ основан на расчете траектории захода с заранее определенным креном, в результате чего предъявляются жесткие требования (порядка 2 с) к своевременности начала разворота. При позднем начале разворота с максимальным расчетным креном заход становится непосадочным и требуется уход на второй круг. Указанный способ невозможно реализовать на электромеханических приборах, требуется специальная индикация. При угле разворота более 180° рубеж начала разворота на посадочный курс рассчитан таким способом быть не может.
Сущность изобретения.
Задачей изобретения является сокращение длины маршрута, времени и расхода топлива при заходе на посадку, повышение безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Заявленный способ позволяет использовать режимы автоматического и директорного управления, не предъявляет жестких требований к своевременности начала разворота и допускает его начало в момент, определяемый летчиком. Способ не накладывает ограничения на систему индикации, т.е. может быть реализован на электромеханических приборах. Он может быть использован для заходов на посадку по схемам заходов по приборам, схемам визуальных заходов и для заходов по произвольным траекториям в режимах ручного, автоматического и директорного управления.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в обеспечении возможности разворота на посадочный курс в момент, определяемый летчиком, при минимальном удалении окончания разворота от ВПП, при углах разворота до ~350°.
Для достижения указанного технического результата производят измерение и индикацию параметров полета: высоты, скорости, курса, углов крена, наклона траектории и сноса, дальности до взлетно-посадочной полосы (ВПП), бокового уклонения от оси ВПП, определяют расчетные точки начала и окончания 4-го разворота в зависимости от скорости полета, ветра, угла разворота на посадочный курс и заранее определенного крена, выполняют полет к 3 или к 4-му развороту, разворот на посадочный курс, снижение по заданной глиссаде.
Отличительные признаки предлагаемого способа выполнения захода на посадку от указанного выше, известного, наиболее близкого к нему способа.
При заходе на посадку по знаку бокового уклонения определяют сторону расчетного разворота.
Непрерывно, в режиме реального времени, до и в процессе разворота рассчитывают крен для выхода на посадочный курс. Знак крена определяют по знаку бокового уклонения. Величину крена определяют методом последовательных приближений. По углу разворота, боковому уклонению от оси ВПП с учетом поправки на вывод из разворота рассчитывают потребный радиус разворота в штиль. По полученному радиусу, с учетом поправки на относ самолета ветром относительно оси ВПП за время разворота и скорости полета, определяют первое приближение расчетного крена разворота. Определяют расчетный радиус разворота с учетом первого приближения расчетного крена. Определяют второе приближение расчетного крена и т.д. до достижения необходимой точности расчета. Затем по рассчитанному крену определяют вторую расчетную точку окончания разворота. Начинают разворот при расположении второй расчетной точки окончания разворота на приемлемом расстоянии до ВПП и приемлемом расчетном крене. Формируют сигнал рассогласования между расчетным и фактическим креном, который подают в автопилот, индицируют и используют в виде директорного сигнала, управляют углом крена таким образом, чтобы фактический крен был равен расчетному.
Благодаря этим признакам обеспечивается сокращение длины маршрута, времени и расхода топлива при заходе на посадку путем обеспечения возможности разворота на посадочный курс при минимальном удалении окончания разворота от ВПП и углах разворота до ~350° со снижением по глиссаде. Обеспечивается возможность использования режимов автоматического и директорного управления. Не предъявляется жестких требований к своевременности начала разворота. Способ не накладывает ограничений на систему индикации, может быть использован для захода на посадку по схемам заходов по приборам, схемам визуальных заходов и заходов по произвольным траекториям с различными и переменными углами наклона глиссады для повышения безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Предлагаемый способ выполнения захода на посадку иллюстрируется чертежами, представленными на фиг.1, 2.
На фиг.1 показана схема расчета параметров разворота, где обозначено:
1 - ВПП.
2 - Осевая линия ВПП.
3 - Метка (заданная точка) окончания маневрирования.
4 - Вектор скорости.
5 - Прогнозируемая траектория разворота.
6 - Расчетный радиус разворота.
7 - Угол разворота.
8 - Поправка на вывод из разворота.
9 - Расчетная точка (метка) окончания разворота.
На фиг.2 показаны примеры реализованных на стенде траекторий захода на посадку в координатах дальность - боковое уклонение, где обозначено:
10 - Дальность.
11 - Боковое уклонение.
Сведения, подтверждающие возможность осуществления изобретения.
Способ выполнения захода на посадку реализуется следующим образом. В процессе полета измеряют и индицируют параметры полета: высоту, скорость, курс, углы крена, наклона траектории и сноса, дальность до взлетно-посадочной полосы (ВПП), боковое уклонение от оси ВПП. Определяют расчетные точки начала и окончания 4-го разворота в зависимости от скорости полета, ветра, угла разворота на посадочный курс и заранее определенного крена. Выполняют полет к 3 или к 4-му развороту, разворот на посадочный курс.
I. Определяют расчетный крен для выхода на посадочный курс. Сторону расчетного разворота определяют по знаку бокового уклонения: при нахождении самолета справа (Z>0) от ЛЗП (Линии Заданного Пути) - разворот правый. При нахождении самолета слева от ЛЗП (Z<0) - расчетный разворот левый.
1. Определяют потребный радиус разворота в штиль:

где
Z - Боковое уклонение от оси ВПП.
ΔZ:=kz×|УР| - Поправка на вывод из разворота.
kz=5
УР - Угол разворота (фиг.1).
За время прогнозируемого разворота с радиусом R0 произойдет относ самолета ветром относительно оси ВПП, что требует уточнения радиуса разворота для того, чтобы выполнять разворот с постоянным креном. Время разворота определяют по формуле:

2. Определяют первое приближение расчетного крена разворота с учетом ветра и времени прогнозируемого разворота:

где
V - Истинная скорость полета.
g - Ускорение свободного падения.
Uz - Боковая составляющая ветра относительно оси ВПП.
3. Определяют первый расчетный радиус прогнозируемого разворота с учетом первого приближения расчетного крена:

Здесь i=1.
Изменение расчетного радиуса прогнозируемого разворота приводит к изменению времени разворота и, следовательно, к изменению относа самолета ветром. Поэтому продолжают расчет.
4. Определяют второе приближение расчетного крена:

Здесь i=2.
5. Определяют 2-й расчетный радиус разворота с учетом 2-го приближения расчетного крена по формуле 4 при i=3.
6. Определяют третье приближение расчетного крена по формуле 5 при
i=3 и т.д. до i=n. Для практики достаточно n≈3÷4.
7. Полученное значение расчетного крена выдают в автопилот и на индикацию.
II. Определяют рубеж окончания разворота.
Рубеж окончания разворота - это расстояние от торца ВПП вдоль оси ВПП, которое определяют по формуле:

где xpos_4 - Расстояние от торца ВПП до рубежа окончания 4 разворота.
xpos - Ордината положения самолета (в прямоугольной системе
координат, связанной с ВПП).
Rn - Расчетный радиус разворота (вычисленный ранее).
Ux - Встречная составляющая скорости ветра на посадочном курсе (относительно ВПП, вдоль осевой линии,«+» навстречу курсу посадки)
 - Расчетное время выполнения разворота.
- Расчетное время выполнения разворота.
Полученное значение xpos_4 выдают на индикацию (счетчик или
метку) и используют для определения возможности выполнения захода.
III. Определяют длину пути до ВПП по участкам.
1. Определяют длину пути на развороте:

2. Определяют длину пути до ВПП:

IV. Определяют заданную высоту полета.

εГ - Угол наклона глиссады.
При нескольких углах наклона глиссады заданную высоту определяют по суммам заданных высот участков. Определяют развернутую дальность до ВПП как сумму длины пути на развороте и расстояния от расчетной точки окончания разворота до ВПП, по развернутой дальности и заданным в зависимости от дальности углам наклона глиссады определяют расчетную высоту полета, сравнивают ее с фактической высотой полета и формируют сигнал рассогласования, который подают на планку отклонения от глиссады навигационно-пилотажного прибора и в автопилот.
V. Индицируют расчетные параметры и выполняют заход на посадку следующим образом.
Указанные выше расчетные значения могут индицироваться различными способами, но алгоритмы их использования будут аналогичными.
Рубеж окончания 4 разворота может индицироваться в виде счетчика или в виде специальной метки на МФИ (Многофункциональном индикаторе) и ИЛС (Индикаторе на лобовом стекле). Он служит для определения возможности выполнения захода на посадку. Заход на посадку возможен при некотором положительном значении xpos_4» которое определяется летчиком в зависимости от метеоусловий и его собственного мастерства. В экспериментах на пилотажном стенде летчики-испытатели заканчивали разворот в основном на удалениях 1÷4 км от торца ВПП при угле наклона глиссады -5°, боковом ветре до 15 м/с и видимости 100 м.
Расчетный крен индицируют в виде специальной метки расчетного крена или в виде сигнала рассогласования между текущим и расчетным креном, который используют для автоматического и/или директорного управления самолетом обычным образом.
Директорный и автоматический режимы управления обычно обеспечивают полет только по заранее заданной траектории. При отклонении от заданной траектории за пределы определенного коридора (Боковое Уклонение >~1,5 км) указанные режимы не работают.
В директорном режиме управления летчик сам вносит отклонения, поскольку директорный сигнал представляет собой разность между расчетным и фактическим значениями параметра (Михалев И.А., Окоемов Б.Н., Павлина И.Г., Чикулаев М.С., Киселев Ю.Ф. «Системы автоматического и директорного управления самолетом». М., «Машиностроение», 1974, 232 с. Стр.74, 88), которыми управляет летчик, и любое, правильное или нет, его вмешательство в управление приводит к колебаниям директорных стрелок. Такая ситуация, известная под названием «стрелки разбежались», в некоторых случаях приводит к катастрофам. Признаками этой ситуации для аварийной комиссии может быть положение обломков самолета в стороне от посадочного курса, столкновение с землей (возвышенностью) происходит с креном.
Использование в качестве сигнала управления заданной величины (крена) не приводит к заметным колебаниям соответствующей метки. Непрерывно, в режиме реального времени, рассчитываемый крен меняется сравнительно медленно в прямолинейном полете, а в развороте его изменения практически незаметны, т.е. разворот производится с постоянным креном. Точности выдерживания рассчитанного крена в ручном режиме управления вполне достаточно для выхода на посадочный курс и перехода на другие способы управления (фиг.2).
При полете в районе аэродрома xpos_4 и расчетный крен 4-го разворота непрерывно изменяются. Если боковое уклонение от оси ВПП велико, а скорость полета мала, то и расчетный крен будет мал, например 2°. Такой крен для захода на посадку является неприемлемым, нужно продолжать полет к осевой линии ВПП. Возможен и другой случай, когда боковое уклонение от оси ВПП мало, а скорость полета велика (при экспериментах на стенде разворот начинали на приборной скорости до 1 350 км/час), то и расчетный крен будет велик, например 70°. Такой крен для захода на посадку тоже может оказаться неприемлемым, нужно уменьшать скорость и/или удаляться от оси ВПП.
В случае, показанном на фиг.1, расчетная точка (метка - поз.9) окончания разворота (xpos_4<0) находится за ВПП (поз.1), что свидетельствует о возможности выполнения захода.
Если подобная фиг.1 индикация отсутствует, то летчик может судить о возможности выполнения захода в данный момент по счетчику, отрицательные значения дальности окончания разворота при этом свидетельствуют о нахождении расчетной точки окончания 4-го разворота за пределами торца ВПП и невозможности выполнения безопасного захода.
Приняв решение на выполнение разворота, летчик включает автопилот или управляет самолетом вручную, совмещая индекс фактического крена с расчетным.
Эксперименты на стенде показали возможность выполнения заходов на посадку с окончанием 4-го разворота на удалениях 1÷4 км от ВПП при имитации видимости=100 м, боковом ветре до 15 м/с, углом наклона глиссады =-5°.
Показанные на фиг.2 заходы выполнили на пилотажном стенде в 2005 г. летчики-испытатели: Мухаметтареев В.М., Ващук Ю.М., Повленко М.В., Коростиев С.В., Комаров А.Н., Кочетков А.П.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| ТРЕХМЕРНЫЙ ДИСПЛЕЙ БОКОВОГО ОТКЛОНЕНИЯ | 1996 |
|
RU2173660C2 |
| СВЕТОСИГНАЛЬНАЯ СИСТЕМА АЭРОДРОМА | 1999 |
|
RU2191143C2 |
Изобретение относится к области авиации, к приборному оборудованию. При выполнении захода на посадку производят измерение и индикацию параметров полета: высоты, скорости, курса, углов крена, наклона траектории и сноса, дальности до взлетно-посадочной полосы, бокового уклонения от взлетно-посадочной полосы, определяют расчетные точки начала и окончания 4-го разворота в зависимости от скорости полета, ветра, угла разворота на посадочный курс и заранее определенного крена, выполняется полет к 3 или 4-му развороту. Непрерывно, в режиме реального времени, до и в процессе разворота рассчитывают крен для выхода на посадочный курс с учетом относа самолета ветром за время прогнозируемого разворота. Знак крена определяют по знаку бокового уклонения, так же по крену определяют расчетную точку окончания разворота. Принимают решение и начинают разворот при расположении расчетной точки окончания разворота на приемлемом расстоянии до взлетно-посадочной полосы и расчетном крене, управляя углом крена таким образом, чтобы фактический крен был равен расчетному в ручном, директорном или автоматическом режимах управления. Достигается сокращение длины маршрута, времени и расхода топлива при заходе на посадку, повышение безопасности полета и посадки самолетов, особенно в условиях полета по приборам. 1 з.п. ф-лы, 2 ил.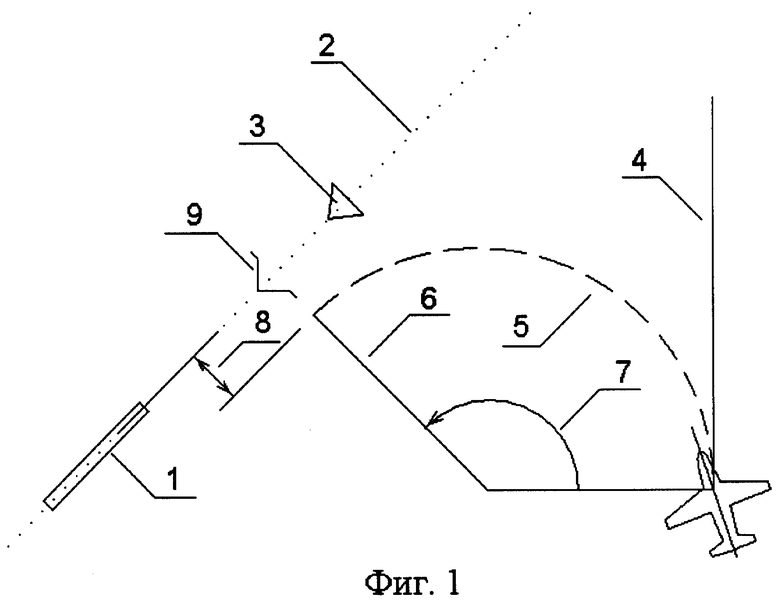
1. Способ выполнения захода на посадку, включающий измерение и индикацию параметров полета: высоты, скорости, курса, углов крена, наклона траектории и сноса, дальности до взлетно-посадочной полосы, бокового уклонения от оси взлетно-посадочной полосы, определение расчетных точек начала и окончания 4-го разворота в зависимости от скорости полета, ветра, угла разворота на посадочный курс и заранее определенного крена, полет к 3-му или к 4-му развороту, разворот на посадочный курс, снижение по заданной глиссаде, отличающийся тем, что непрерывно в режиме реального времени до и в процессе разворота рассчитывают крен для выхода на посадочный курс, затем по рассчитанному крену определяют расчетную точку окончания разворота, начинают разворот при расположении расчетной точки окончания разворота на приемлемом расстоянии до взлетно-посадочной полосы и приемлемом расчетном и фактическом креном, который подают в автопилот, индицируют и используют в виде директорного сигнала, управляют углом крена таким образом, чтобы фактический крен был равен расчетному.
2. Способ выполнения захода на посадку по п.1, отличающийся тем, что знак крена определяют по знаку бокового уклонения, а величину крена определяют методом последовательных приближений: по углу разворота, боковому уклонению от оси взлетно-посадочной полосы с учетом поправки на вывод из разворота, рассчитывают потребный радиус разворота в штиль, по полученному радиусу, с учетом поправки на относ самолета ветром относительно оси взлетно-посадочной полосы за время прогнозируемого разворота и скорости полета определяют первое приближение расчетного крена разворота, определяют расчетный радиус разворота с учетом первого приближения расчетного крена, определяют второе приближение расчетного крена и т.д. до достижения необходимой точности расчета, при этом для практики достаточно 3-4 приближений.
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ БЕЗДВИГАТЕЛЬНОЙ ПОСАДКЕ | 2005 |
|
RU2321524C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВЫХОДЕ НА ЛИНИЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2003 |
|
RU2240589C1 |
| US 2005192739 А1, 01.09.2005 | |||
| GB 1272582 A, 03.05.1972. | |||

